 便攜式L波段微波輻射計的設計與特性
便攜式L波段微波輻射計的設計與特性
便攜式L波段微波輻射計的設計與特性
(轉譯自Portable L-Band radiometer (PoLRa): Design and Characterization;
Derek Houtz , Reza Naderpour and Mike Schwank)
摘要:介紹了一種適用于地面遙感或無人機測繪的輕質量、小體積雙偏振L波段輻射計。在ESA土壤濕度和海洋鹽度(SMOS)和NASA土壤濕度上有突出的應用主被動(SMAP)衛星的L波段輻射測量可用于反演環境參數,包括土壤濕度、海水鹽度、雪中液態水含量、雪密度、植被光學深度等。介紹了氣隙貼片陣列天線的設計和測試,并顯示可提供37°的3db全功率波束寬度。我們提出了射頻(RF)前端設計,它采用直接檢測架構和平方律功率檢測器。使用兩個內部參考校準,包括在環境溫度下的匹配電阻源(RS)和主動冷源(ACS)。射頻(RF)前端不需要溫度穩定,因為通過天空測量表征ACS噪聲溫度。介紹了ACS的表征過程。在1 s積分時,輻射計的噪聲等效Δ (Δ)溫度(NEΔT)為~0.14 K。天線總溫度不確定度范圍為0.6 ~ 1.5 K。
1.介紹
星載L波段(1 – 2GHz)微波輻射計的現代時代始于歐洲航天局(ESA) 2010年土壤濕度和海洋鹽度衛星(SMOS)[1]。緊隨其后的是美國guo家航空航天局(NASA)的Aquarius衛星[2]和土壤濕度主動式被動衛星(SMAP)[3]。L波段輻射測量通常發生在1400-1427 MHz的受保護頻段。基于該波段的雙偏振微波亮度溫度,已經證明了土壤濕度[4,5]、海面鹽度[6]、植被光學深度[7,8]、雪液水[9]、雪密度[10-12]、土壤凍結/解凍[13,14]和海冰厚度[15]等環境狀態參數的反演。
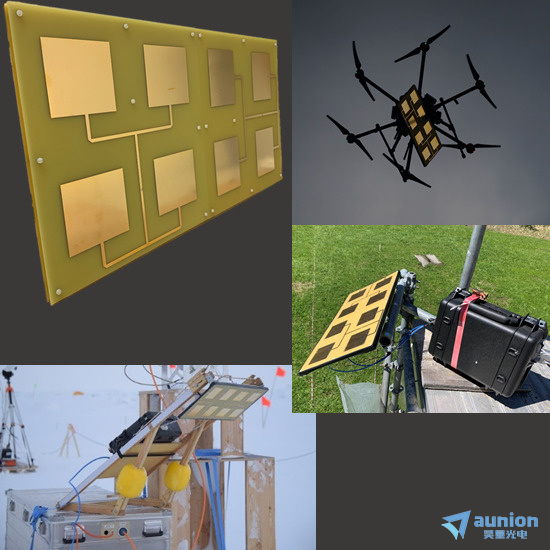
近地表L波段輻射測量,如便攜式L波段輻射計(PoLRa),允許來自多個平臺的高空間分辨率的L波段輻射測量。緊湊和輕質量的設計允許在無人駕駛飛行器(UAV)或無人駕駛飛機,輪式車輛或固定在塔,桿子或建筑物上使用。無人機安裝的PoLRa能夠提供幾米(<10米)的地面分辨率。
基于無人機的L波段輻射計已經在先前的文獻[16,17]中得到證實。這兩種系統都不能提供雙極化離zui低點天線溫度,而這種溫度對于已建立的檢索算法(如Tau-Omega (TO)[18,19]或Two-Stream (2S)發射)來說是很優的模型(EMs)[5]。
PoLRa是一種直接探測輻射計,提供校準的雙極化L波段天線溫度,在1 s積分時分辨率為~0.14 K,根據積分時間和輸入天線溫度的不同,總不確定度在0.6-1.5 K之間。PoLRa采用獨特的雙2 × 2貼片陣列天線,帶有氣隙襯底,具有高增益和低歐姆損耗。獨特的天線溫度校正方案允許校正相對較寬的天線功率37°全波束寬度?3db靈敏度。該校正將天線方向圖與模擬的角度相關的面亮度溫度進行卷積,同時還考慮了幾何性質在偏離軸視角處引入的偏振混合(參見附錄[20])。PoLRa是一個研究型的輻射計系統,本文演示了它的特性。
下面幾節介紹輻射計硬件、特性、初步結果和結論。硬件包括輻射計、電子設備和天線。表征包括輻射計的分辨率和穩定性、校準和不確定度。初步結果包括基于無人機的天線溫度測量和土壤水分檢索。
2.硬件
以下各小節將介紹PoLRa的硬件組成,包括射頻前端、后端和天線。
2.1射頻前端
PoLRa是一種直接探測輻射計,具有三個模擬濾波級,其中一個在第1個放大器之前。前端濾波器對于防止射頻推斷(RFI)信號使低噪聲放大器(LNA)飽和至關重要[21]。輻射計使用兩個內部校準噪聲源作為參考,包括環境溫度下的匹配電阻源(RS)和主動冷源(ACS)。一個四端口低損耗射頻開關在兩個校準源和兩個(垂直和水平)極化天線之間切換。溫度傳感器監測參考噪聲源以及天線和電纜的物理溫度。經過多次濾波放大后,射頻信號由線性平方律功率檢測器檢測。
射頻前端框圖如圖1所示。濾波器是陶瓷諧振器濾波器,兩個LNA級提供了~70 dB的總增益。射頻組件目前通過同軸電纜線路和SMA型連接器連接。RF組件可以與微帶或共面波導連接,從而允許在單個印刷電路板(PCB)上實現整個RF前端。單個帶通濾波器的實測響應如圖2所示。
前端損耗或噪聲系數(NF)由第1個LNA之前的組件驅動,并決定輻射計系統噪聲溫度,從而決定輻射分辨率。由于PoLRa所要求的輕質量和小體積,使用大的低損耗諧振腔濾波器是不切實際的。四口射頻開關、隔離器和陶瓷腔濾波器的插入損耗分別為1.3 dB、0.2 dB和2.1 dB。第1個LNA的NF為0.6 dB,由于所有連接器和SMA部分約0.8 dB,存在額外的損耗。從交換機到包括第1個LNA的NF為5.0 dB。輻射計系統噪聲溫度Tsys由以dB為單位的NF計算[22]:

Tref是290k。這對應于Tsys為627 K。
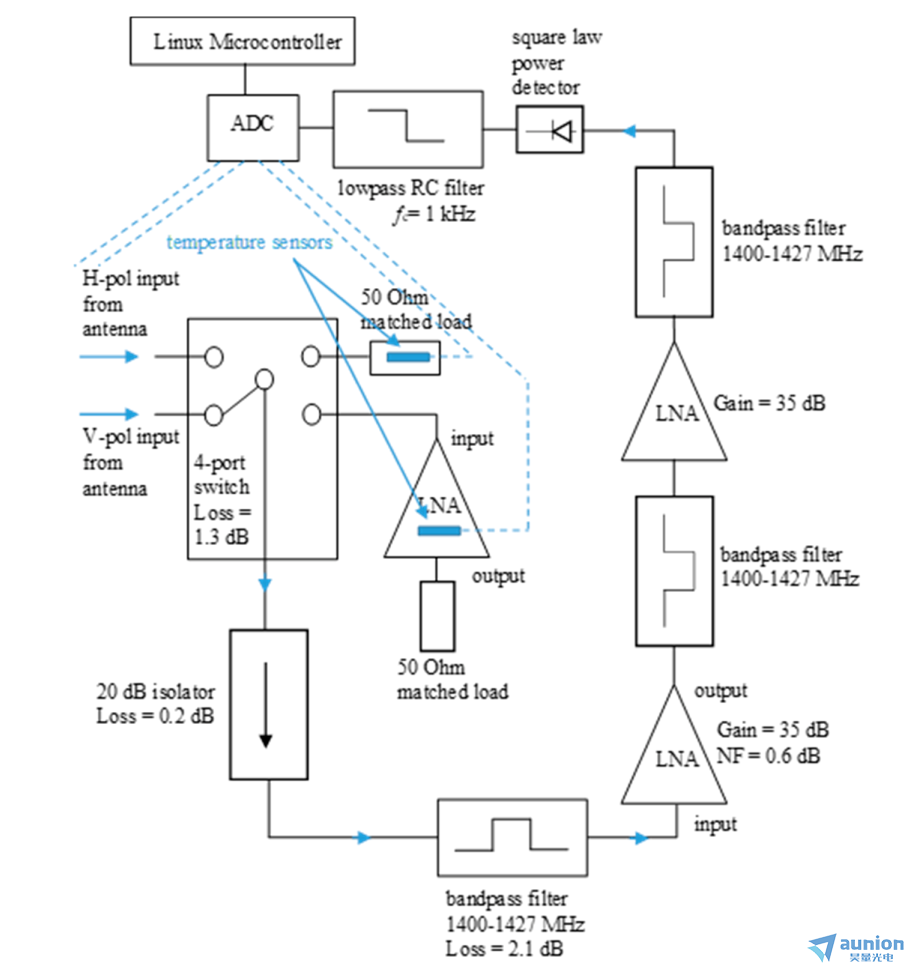
圖1所示,L波段輻射計射頻(RF)前端和后探測電子器件的框圖。
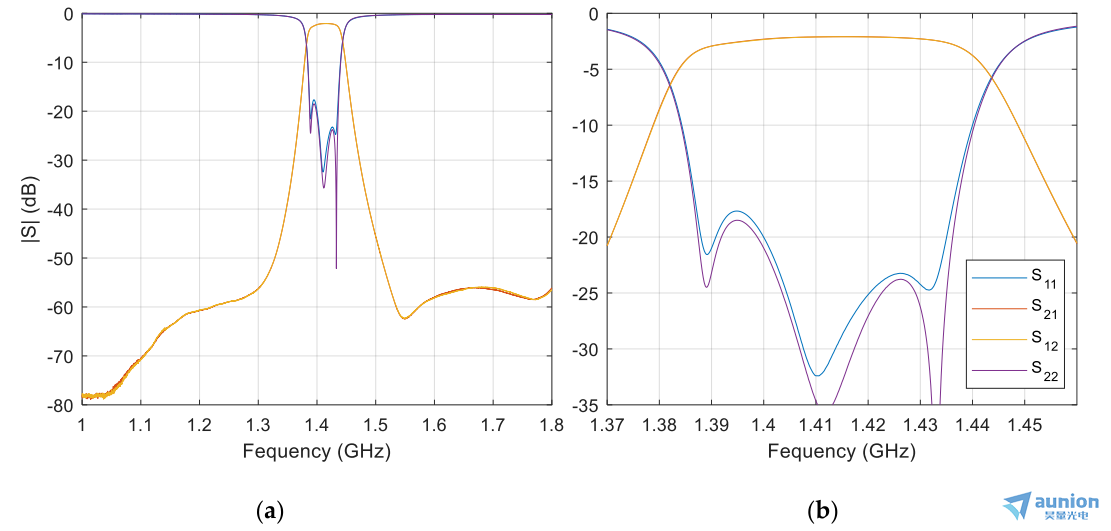
圖2,用矢量網絡分析儀(VNA)測量濾波器響應:(a)寬帶響應;(b)頻率y軸在保護頻帶附近變焦。
2.2.后端及處理
Linux微控制器驅動開關,讀取溫度傳感器,并對模數轉換器(ADC)進行采樣,讀取功率檢測器輸出信號。開關的穩定時間小于1 ms,通常一個完整的校準周期需要~69 ms,其中積分每個開關位置花費16 ms,在四次~1 ms的開關位置穩定周期內對4個溫度傳感器進行采樣。ADC的采樣頻率為~ 2kHz和22bit,低通濾波器的RC時間常數為τ≈1ms。由于電池電源的穩定電壓調節,該ADC能夠檢測<0.01 mV分辨率。
輻射計完全運行在5V DC上,功耗約0.7 A,總功耗低于4W。輻射計沒有主動溫度控制,這被證明是不必要的,其達到所需的精度,可與星載L波段輻射計相媲美。相反,我們依賴于ACS的物理溫度依賴性的表征。第3.1節詳細介紹了這種特性。第三節還介紹了輻射計噪聲溫度的校準過程。
2.3. 天線設計與表征
獨特的雙貼片陣列天線結構緊湊,重量輕,并提供足夠的指向性,以獲得合理的地面分辨率,低后瓣貢獻和較小的極化串擾。印刷電路板(PCB)貼片陣列使用由氣隙隔開的兩個PCB層來獲得高增益和高輻射效率。貼片由印刷在與貼片相同的PCB上的微帶饋電網絡以均勻的幅度和相位饋電。微帶饋電網絡用同軸探頭饋電,用1m的SMA電纜連接到前端交換機。天線由兩個厚度為1.5 mm的FR4 PCB組成,中間間隔有6mm的PTFE墊片。PCB連接使用尼龍螺釘通過墊片和PCB層運行。天線總尺寸為0.6 m × 0.3 m × 9mm。
監測天線和饋電電纜的物理溫度,如圖1所示。天線的歐姆損耗和同軸饋電電纜的損耗是根據經驗確定的,作為第3節中描述的ACS特性的一部分。圖3顯示了天線在地面天空測量和無人機測量期間的照片。

圖3,天空測量時安裝在塔上的貼片陣列天線(a);(b)在飛行測量時安裝在多旋翼無人機上。
在設計過程中,利用商用有限元電磁學軟件ANSYS electromagnetics Suite對天線回波損耗進行了仿真。優化了饋電網絡和補片尺寸,減小了模擬回波損失。在天線指向天空的情況下,用矢量網絡分析儀(VNA)測量回波損耗。天線的諧振,或zui小回波損耗,對FR4襯底的電磁介電常數高度敏感。zui終呈現的設計需要多次迭代才能準確確定特定PCB供應商提供的FR4介電常數。
利用ANSYS Electromagnetics Suite有限元軟件對天線的角相關功率靈敏度進行了仿真。此外,采用[23]中描述的太陽立交橋方法測量天線功率靈敏度方向圖。天線的定位使軸向指向當天太陽zui高天頂角的方位角和仰角。用太陽立交橋法測量的相對天線方向圖將增益表征為太陽與天線軸向之間的總角度α的函數。球面極角θ只會恰好等于α時,太陽直接通過頭頂,但對α的響應應該在恒定φ={0?,90?}之間的切片。太陽立交橋法的數據只顯示通過- 6 dB功率電平,因為在高角度地平線變得雜亂的樹木,和測量變得不可靠。圖4顯示了(a)模擬和測量的天線回波損耗,(b)模擬和測量的天線功率靈敏度圖(歸一化天線增益)。
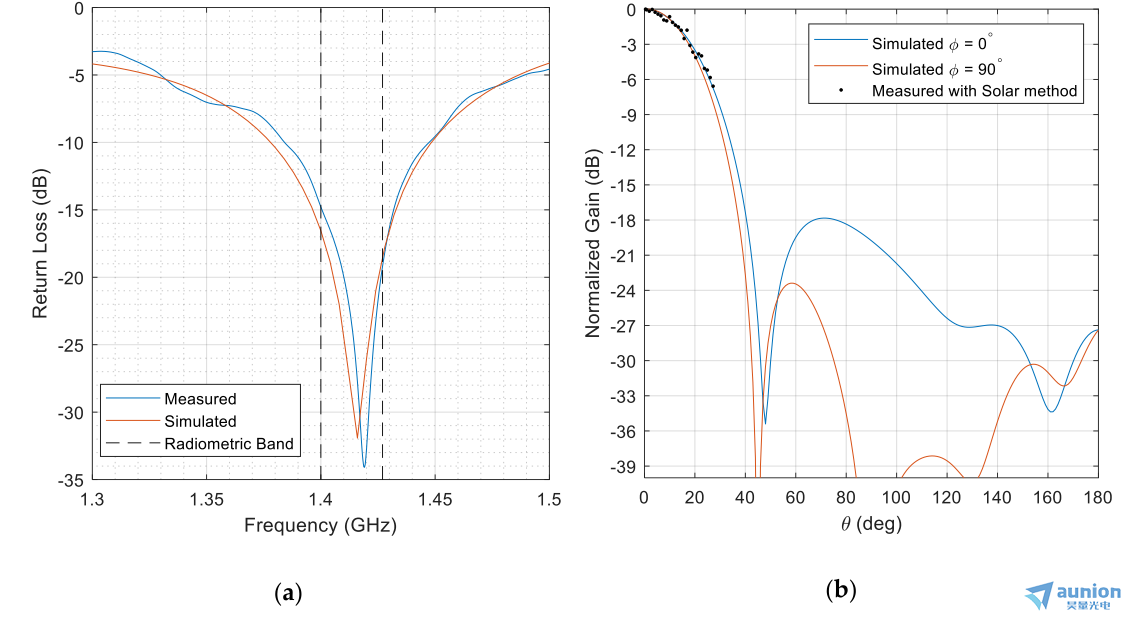
圖4,(a)有限元模擬和VNA測量的天線回波損耗;(b)由有限元模擬和太陽立交橋測量得到的歸一化天線功率靈敏度圖。
3.輻射計表征
下面的小節描述了PoLRa輻射計的實驗特性。首先,描述了主動冷源(ACS)表征過程;其次,討論了穩定性和輻射分辨率;第三,給出了輻射計不確定度的量化。
3.1.主動冷源表征
在非溫度穩定的輻射計硬件上使用主動冷源(ACS),需要確定ACS噪聲溫度對溫度的依賴性。在沒有星系背景輻射的情況下,根據天頂角的不同,天空的L波段亮溫Tsky約為幾個開爾文[24]。銀河系輻射已被證明對天空亮度溫度的影響高達5K或更多[25],但與[25]中假設的10°天線相比,相對較大的37°天線波束寬度將其減少到不到2K。
兩個極化開關輸入處的噪聲溫度p={H,V},Tinp可以被以下式子表達:

式中ap為天線/電纜平均物理溫度Tphy(假設所有天線元件和電纜溫度均勻)下總傳輸路徑(TP)的吸收。請注意,溫度符號上的條形重音在接下來的討論中指的是物理溫度。
以分貝(dB)為單位的Lp是天線和輻射計輸入之間的累積損耗(上面提到的TP),它考慮了由于非理想天線效率、電纜損耗、適配器和連接器損耗以及不匹配誤差造成的損耗。由于兩種傳輸路徑(TPs)的電纜和天線損耗各自的可變性,我們考慮在每個極化p = {H, V}中不同的損耗Lp。
我們使用天空和環境匹配電阻源(RS)測量,以開關輸入作為參考平面對輻射計進行兩點校準。輻射計增益Gp和輻射計固有偏置(off)噪聲溫度Toffp由下式給出:
式中TRS= TRS為RS的噪聲溫度,如果RS完全匹配,則等于RS的物理溫度TRS。uRS為RS開關位置測得的探測器電壓,uskyp為天線極化p = {H, V}處開關位置測得的探測器電壓,天線朝向天空。開關輸入端ACS的校準噪聲溫度TACSp為:

如文獻[26,27]所示,ACS參考文獻的噪聲溫度TACSp隨其物理溫度呈線性增加。因此,以下線性模型適用于表示ACS噪聲溫度TACS,modp作為其測量物理溫度TACS的函數,

其中mp和bp分別是線性zui小二乘回歸的斜率(單位為K/K)和偏移量(單位為K)。給定一個理想的開關,因為所有的值都參考開關輸入,所以沒有極化依賴于ACS噪聲溫度,這意味著TACSH= TACSV。我們將此與假定的ACS噪聲與物理溫度之間的線性關系一起使用,以制定成本函數(CF),通過zui小二乘擬合zui小化并獲得LH和LV的損失:

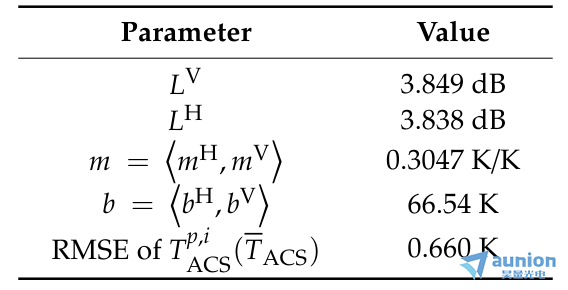
其中TACSH,i和TACSV,i是由式(5)導出的ACS噪聲溫度,并使用天空測量得到的電壓uACS,i ={1,2,…n}。CF中的第1項表示ACS噪聲與其物理溫度的線性關系,第2項表示TACSH= TACSV。利用數值全局zui小查找器zui小化CF以獲得zui優LH和LV。對于理想的測量系統,公式(6)中使用的線性擬合參數mp和bp對于p = {H, V}是相同的,但在實踐中并非如此。為了獲得zui優的與極化無關的ACS線性溫度依賴關系,可以對m =<mH, mV>和b =<bH, bV>進行兩個極化的平均,這相當于所有TACSp,i值與TACS的線性擬合。圖3a顯示了在達沃斯-拉雷特遙感野外實驗室進行這些天空測量的設置[28]。天線以大約70°高度角朝向南方。在2020年5月7日至8日約11小時的時間內,每隔5分鐘進行一次天空測量。傍晚至夜間(當地時間17:00-06:00)測量是為了zui大化物理溫度范圍,同時也避免太陽侵入天線。我們還使用夜空計算器調查了潛在的銀河系噪聲入侵,并從我們的赤道坐標估計其小于1 K[25],zui壞的情況發生在測量周期的開始。圖5顯示了物理溫度和測量到的探測器電壓。夜間冷卻期提供了~25 K的溫度變化。請注意,PoLRa上的檢測器是反斜率檢測器,因此較低的電壓對應于較高的絕對功率水平。圖6提供了校準后的冷負荷亮度溫度TACSp,i(TACS)與ACS物理溫度TACS,以及兩個極化的線性擬合線TACS,mod和該擬合線的95%置信區間。表1顯示了成本函數(CF)zui小化過程產生的參數值。
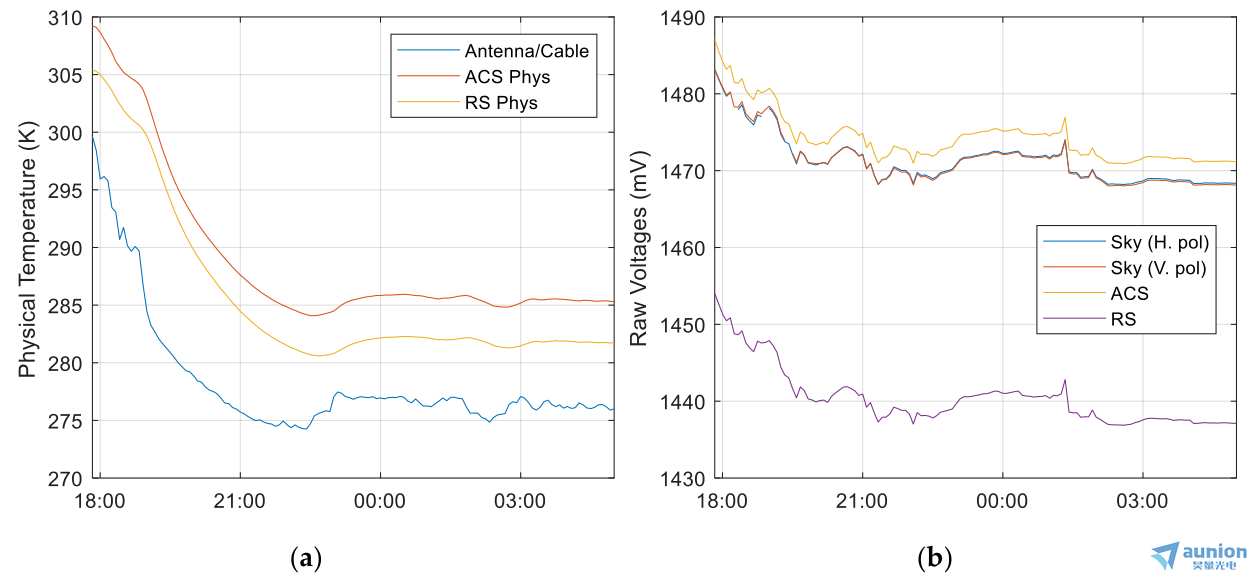
圖5,(a)測量到的物理溫度,(b)在天空測量期間測量到的探測器的原始電壓與一天時間的關系。
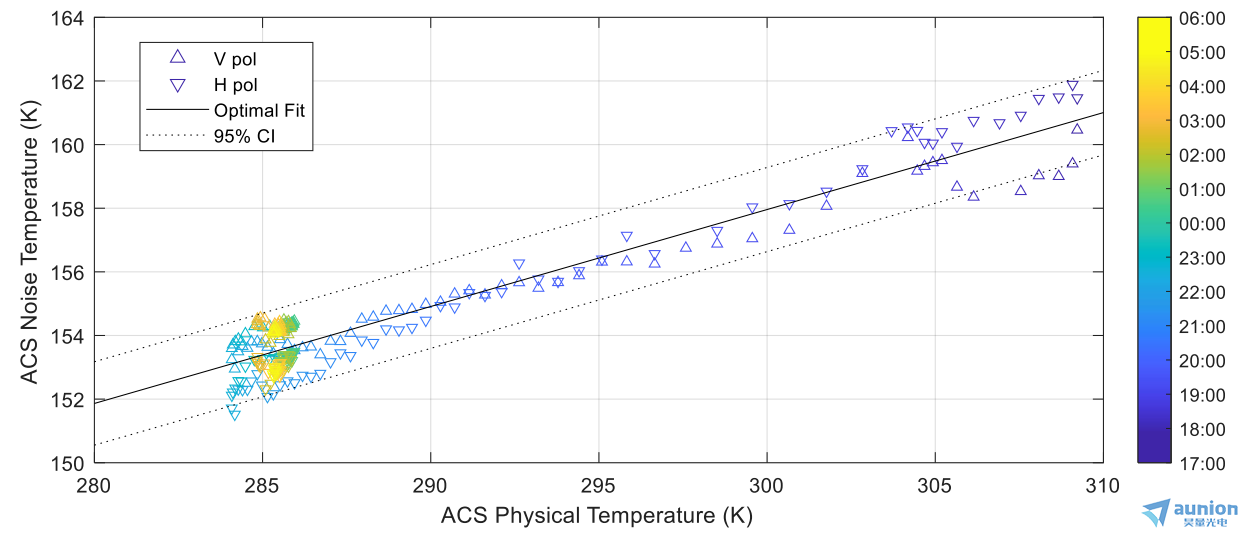
圖6,主動冷源(ACS) TACS的測量物理溫度與校準的ACS噪聲溫度TACSp,i和線性擬合TACS,mod,用于基于天空測量的ACS特征。虛線表示線性模型的95%置信區間(CI)。顏色條表示在2020年5月7日至8日之間進行每次測量的當地時間。
表1,來自ACS特性的參數值。
3.2. 輻射計穩定
對于輻射計的標稱使用,天線在水平和垂直極化時的溫度使用兩點校準,以內部匹配電阻源(RS)和主動冷源(ACS)為參考。與式(3)(4)相似,輻射計增益G和偏移Toff的計算公式為:

在開關位置p = {V, H}處,在開關輸入參考平面處的噪聲溫度Tinp為:

其中up為天線指向目標場景時,開關在水平和垂直極化輸入口測得的探測器電壓。
通過在兩根天線饋電電纜的末端附加電阻匹配源來表征輻射計的穩定性。輻射計從冷啟動開始持續測量約20分鐘,在兩個外部電阻源上使用τ = 16 ms積分時間。在四個開關位置之間切換對應的總時間,在每個位置(ACS, RS和兩個外部電阻源)對檢測器采樣16ms,對四個溫度傳感器采樣69 ms。在穩定性測試中,輻射計使用電池供電。
在穩定性試驗中,外部匹配的電阻源被動地保持在環境溫度下。假定各自的射頻電纜和匹配的電阻源處于相等和均勻的溫度。在測試過程中,將熱電偶溫度傳感器連接到匹配的電阻源上,以監測其物理溫度。在測量期間,檢測到匹配的電阻源輕微發熱(~0.6 K),可能是由靠近輻射計電子設備產生的熱量引起的。
噪聲等效Δ(Δ)溫度(NEΔT)由該匹配電阻源穩定性試驗實驗計算得到。NEΔT取決于積分時間(τ),在我們的系統中,它由原始16 ms樣本的尾隨滾動平均值表示。所提供的NEΔT值是作為超過1000個原始樣品的校準天線溫度的標準偏差計算的。積分時間被實現為與積分時間對應長度的尾隨滾動平均值(矩形窗口),因此是16的倍數。表2給出了不同積分時間下的實驗NEΔT值。圖7給出了H極化開關端口的測量原始(在τ = 16 ms(藍色)時采樣)和集成天線溫度的示例,以及各自原始數據的直方圖和高斯擬合。圖7中原始樣本的峰度為3.018,接近高斯分布。
表2,兩種極化和不同積分時間下實驗輻射計噪聲等效Δ (Δ)溫度(NEΔTs)表。
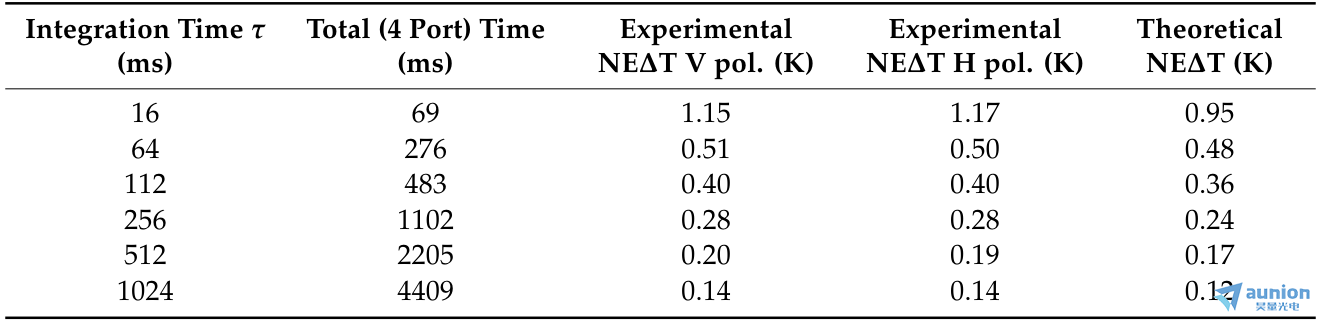
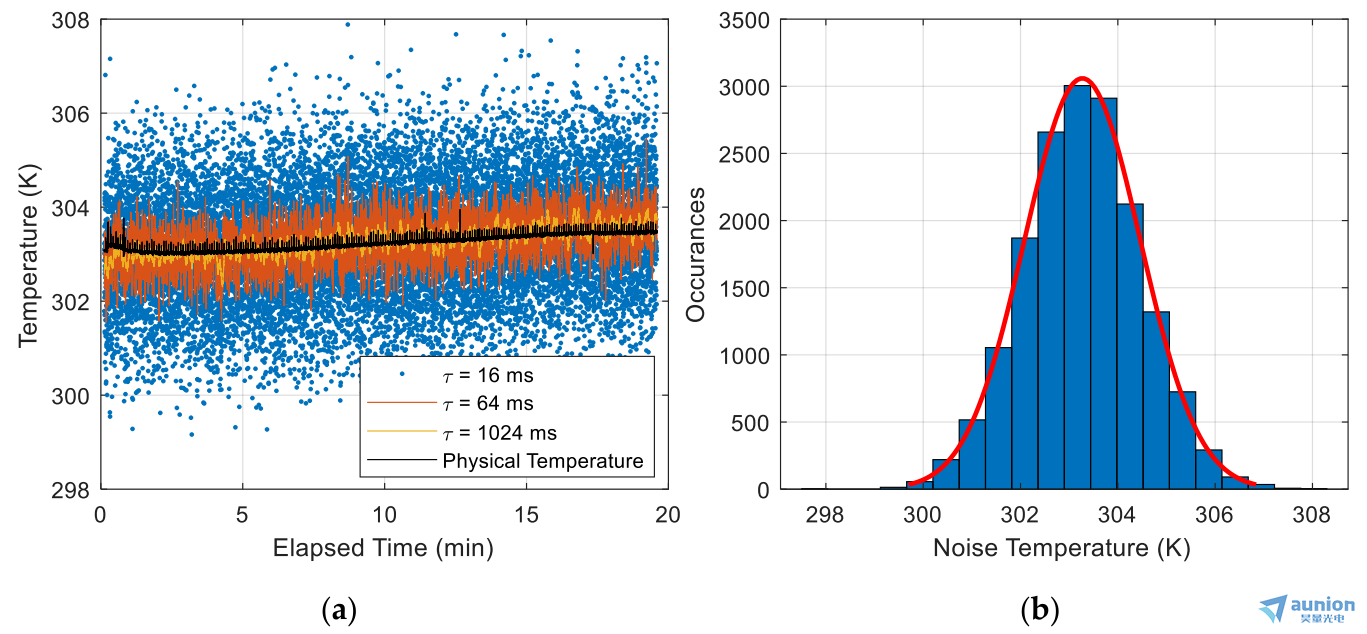
圖7,輻射計在匹配電阻源期間測量的噪聲溫度連接到輻射計的H端口,用于量化PoLRa的穩定性。(a)不同積分時間τ的噪聲溫度時間序列隨源的物理溫度繪制。(b) (a)所示原始τ = 16 ms樣本的直方圖和分布的高斯擬合。
NEΔT也可以通過公式[29]進行理論計算:

其中Tsys為2.1節(627 K)中討論的系統噪聲溫度,B為系統的RF帶寬,τ為檢測后積分時間。射頻帶寬由FE濾波器決定,其在1400-1427 MHz范圍內具有27 MHz的3db通頻帶。理論值NEΔT和實驗值見表2。理論值可能略低(~20%),因為在實驗過程中輻射計的溫度不是完全穩定的,并且式(11)中假設的理想矩形濾波器的帶寬高估了實際濾波器的帶寬。實驗確定的NEΔT值確實與各自理論值的趨勢密切相關,這表明輻射計確實是在測量高斯熱噪聲。
外阻源的平均噪聲溫度與平均物理溫度的差值在H極化口為0.02 K,在V極化口為0.26 K。垂直極化端口的較大差異可能是由于電纜加熱不均勻或溫度傳感器與電阻源的熱接觸不理想所致。熱電偶傳感器的絕對精度規格僅為1K。考慮到這一點,外部電阻源(附在H端口上)的測量噪聲溫度與傳感器不確定度內的物理溫度一致。
3.3. 不確定性特征
在變量不相關的情況下,交換機端口參考平面標定噪聲溫度的系統不確定度可以用方差公式表示為[30]:

其中Δ前綴表示與前一個變量相關的不確定性。測量電壓uRS、uACS、up的系統不確定度ΔuRS、ΔuACS、Δup均為0.01 mV。當通過增益G (~5 K/mV)的乘積轉換為溫度單位時,這些不確定性遠小于TRS, TACS的測量物理溫度ΔTRS= ΔTACS?1K。因此式(12)可化簡為:

其中:
其中偏導數由式(8)和式(9)代入式(10)計算。在3.1節給出的溫度傳感器不確定度ΔTRS= ΔTACS?1K, ACS RMSE ΔTACS= 0.66 K的條件下,輸入端口p = {H, V}處PoLRa噪聲溫度測量的系統不確定度ΔTinp可由式(13)計算。我們計算ΔTinp的范圍為上,覆蓋50 K≤Tp≤350 K的范圍,用于地面場景的測量。總不確定度ΔTin,totp的測量噪聲溫度在輻射計端口p = {H, V},然后計算為系統和統計貢獻的平方根和:

系統不確定度ΔTinp和總不確定度ΔTin,totp在圖8中為兩個不同的積分時間繪制。當測量的噪聲溫度大致處于兩個校準參考點(RS和ACS)之間時,不確定度達到zui小,當測量的噪聲溫度需要外推超出校準參考點時,不確定度增加。
額外的不確定性來源,如非線性、失配和隔離[31],在本分析中被忽略,因為與與溫度傳感器相關的不確定性相比,它們被認為很小。檢測器提供線性估計,元件和開關端口之間的不匹配都測量在?20 dB以下。上述不確定度分析只考慮了影響開關輸入端口p = {H, V}處測量噪聲溫度Tinp的內部不確定源。
當天線在地面上觀察自然足跡時,會產生額外的不確定性源,包括潛在的射頻干擾(RFI)。盡管許多現代輻射計zui近使用高采樣率數字后端來緩解頻域RFI,但這種方法仍然會導致殘余RFI,并且不是萬無一失的[32]。在時域對樣本進行高斯擬合也是一種適當的RFI檢測手段,如文獻[28,33,34]所示。本文討論的便攜式L波段輻射計(PoLRa)采用直接檢測架構,具有穩定、簡單和低功耗的總功率檢測。類似輻射計的數字后端已被證明至少消耗19W[35],這遠遠超過PoLRa使用的~ 4W。
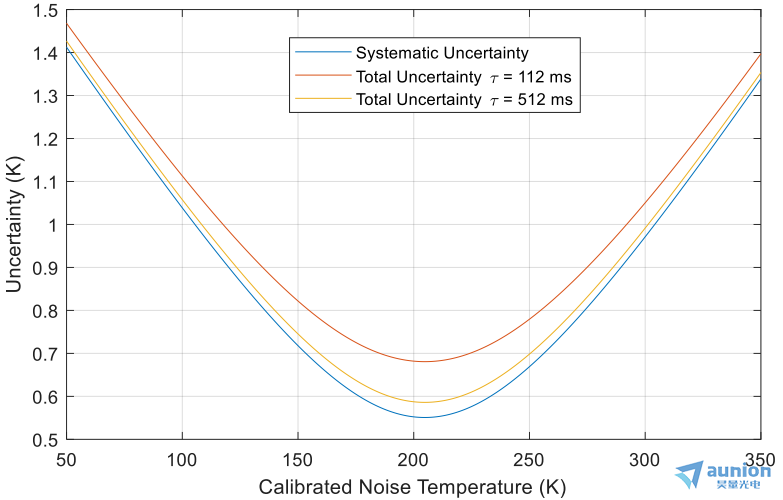
圖8。計算系統和總噪聲溫度不確定性作為兩個不同積分時間τ的測量噪聲溫度的函數。
用于檢索地球物理狀態參數的從天線溫度到足跡亮度溫度的轉換也可能需要進行校正,以考慮到天線的相對較大的視場。當以非zui低點入射角觀察地面時,天線平面上的線極化只對應于天線軸線上相同的線極化。在非zui低點角度,來自地面的發射必須進行偏振混合校正;該過程的詳細描述見[20]的附錄a。基于PoLRa的地球物理參數(如土壤濕度)檢索將在未來使用原位土壤濕度傳感器網絡進行驗證。
4.討論
概述了便攜式L波段輻射計(PoLRa)的設計和特性。給出了詳細的技術討論,以證明該輻射計的硬件功能符合預期,并提供了其噪聲溫度測量不確定度的估計。
雖然使用與其他輻射計相似的架構,但PoLRa的天線設計獨特,電子設備簡單,功耗低,成本效益高,無需主動溫度控制。由于采用了新穎的主動冷源(ACS)表征方法,這里介紹的輻射計不需要溫度穩定性。利用模擬的冷天亮度溫度來表征ACS噪聲溫度對預期工作溫度范圍內物理溫度變化的響應。這一初始特性允許之后對輻射計進行完整的內部校準,而不需要進一步的天空測量。
內部校準噪聲源(RS和ACS)的測量物理溫度的不確定度是PoLRa輸入端口測量噪聲溫度總不確定度的主要原因之一。通過提高溫度傳感器的質量,可以提高輻射計的精度,但這也需要研究二階不確定性項,如非線性和不匹配。與基于衛星的無源l波段測量相比,在自然足跡上測量的噪聲溫度范圍的總不確定性值在0.6 K到1.4 K之間,仍然很低。例如,SMOS的不確定度為3k或更高[36,37],而NASA SMAP輻射計的不確定度為1.3 K[3]。
PolRa的總質量小于4公斤,包括所有安裝硬件,可以安裝在無人駕駛飛行器(UAV)上,如多直升機無人機,或者可以用作塔架或簡單桿子上的地面儀器。這種輻射計也可以安裝在其他車輛上,如農用拖拉機、汽車或飛機上。系統的低功耗允許使用緊湊型電池或小型太陽能電池板和電池系統進行離網地面使用。這種具有成本效益的設計允許生產大量這樣的輻射計,這將允許在廣泛的網絡中用于衛星地面驗證目的,或大規模生產用于農業和土木工程的硬件。
農業方面的應用可能是基于無人機的土壤水分和植被含水量測繪。土壤濕度信息可用于智能灌溉系統,節約用水,減少作物壓力,提高作物產量。植被含水量檢索可用于評估作物健康狀況和作物成熟度,如小麥和谷物,以確定zui佳收獲時機。
基于無人機的PoLRa在土木工程中的應用將包括發現堤壩和水壩的泄漏,以及為調查和建筑規劃評估土壤濕度。PoLRa未來的其他潛在用途包括滑坡風險預測和緩解,以及通過雪濕度和密度的空間測繪來減輕雪崩風險。
本論文介紹了PoLRa輻射計的硬件設計、特性、校準和不確定度分析。我們只包括冷天空的自由空間測量,以表征主動冷源(ACS)校準參考。這里介紹的其他測量都是在實驗室中進行的。未來的出版物將介紹使用PoLRa的地面和無人機測量,以及相關的環境參數檢索,例如,包括土壤濕度和植被光學深度。
5.結論
我們介紹了一種小型、輕質量、低成本的L波段輻射計設計,并提供了表征結果來證明其性能。L波段,頻率zui低的無源保護波段,從1400-1427 MHz,提供對自然介質的滲透,如土壤和植被。
通過在多旋翼無人機上安裝便攜式低質量輻射計,可以實現~6米或更小的像素尺寸。PoLRa還可以方便地作為衛星驗證網絡的地面輻射計,或任何亮度溫度時間序列測量,并且可以安裝在簡單的自動氣象站類型的基礎設施上。本文介紹了該輻射計的硬件設計、標定、表征和不確定度分析。基于無人機的演示和結果保留用于以下出版物。
給出了直接檢測總功率輻射計的框圖和實測的系統前端濾波器響應。根據前端和第1LNA的級聯噪聲系數,估計輻射計的系統噪聲溫度為Tsys= 627 K。給出了獨特的氣隙貼片天線陣設計,并給出了仿真和實測的回波損耗和增益圖。天線的半功率全波束寬度為37?,并且與方位角幾乎對稱,從而產生圓形zui低點觀看像素。
第3節介紹了主動冷源(ACS)參考、噪聲等效Δ (Δ)溫度(NEΔT)和總輻射不確定度的特征。ACS與電纜和天線損耗因子一起進行了表征,噪聲溫度均方根誤差(RMSE)為0.66 K。在τ≈1的積分時間內,實驗確定的NEΔT是0.14K,這與由系統噪聲溫度、積分時間和帶寬確定的理論值0.12 K非常吻合。由于校準視圖和兩個極化視圖,1秒的積分時間實際上總共需要大約4.4秒。對于未來基于無人機的操作,更現實的集成時間約為100ms,對應于總測量時間為480ms,NEΔT為0.4 K。
輻射計的總不確定度是系統不確定度和統計不確定度貢獻的總和。系統不確定度由標定參考不確定度的傳播決定,而統計不確定度等效于NEΔT,并且是積分時間的函數。在觀測范圍內,總不確定性在0.6 K到1.4 K之間,15個預期自然亮度溫度中的13個在50 K到350 K之間。這個值小于ESA SMOS衛星的輻射不確定度,與NASA的SMAP儀器相當。
參考文獻:
1. Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.M.; Font, J.; Berger, M. Soil moisture retrieval fromspace: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39,1729–1735.
2. Le Vine, D.M.; Lagerloef, G.S.; Colomb, F.R.; Yueh, S.H.; Pellerano, F.A. Aquarius: An instrument to monitorsea surface salinity from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2040–2050.
3. Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.;Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE. 2010, 98,704–716.
4. Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.;Gruhier, C.; Juglea, S.E.; et al. The SMOS Soil Moisture Retrieval Algorithm. IEEE Trans. Geosci. Remote Sens.2012, 50, 1384–1403.
5. Schwank, M.; Naderpour, R.; M?tzler, C. “Tau-Omega”- and Two-Stream Emission Models Used for PassiveL-Band Retrievals: Application to Close-Range Measurements over a Forest. Remote Sens. 2018, 10, 1868.
6. Font, J.; Camps, A.; Borges, A.; Martín-Neira, M.; Boutin, J.; Reul, N.; Kerr, Y.H.; Hahne, A.; Mecklenburg, S.SMOS: The challenging sea surface salinity measurement from space. Proc. IEEE 2010, 98, 649–665.
7. Rodríguez-Fernández, N.J.; Mialon, A.; Mermoz, S.; Bouvet, A.; Richaume, P.; Al Bitar, A.; Al-Yaari, A.;Brandt, M.; Kaminski, T.; Le Toan, T. An evaluation of SMOS L-band vegetation optical depth (L-VOD) data sets: High sensitivity of L-VOD to above-ground biomass in Africa. Biogeosciences 2018, 15, 4627–4645.
8. Li, X.; Al-Yaari, A.; Schwank, M.; Fan, L.; Frappart, F.; Swenson, J.; Wigneron, J.-P. Compared performancesof SMOS-IC soil moisture and vegetation optical depth retrievals based on Tau-Omega and Two-Streammicrowave emission models. Remote Sens. Environ. 2020, 236, 111502.
9. Naderpour, R.; Schwank, M. Snow Wetness Retrieved from L-Band Radiometry. Remote Sens. 2018, 10, 359.
10. Schwank, M.; Naderpour, R. Snow Density and Ground permittivity Retrieved from L-Band Radiometry:Melting E?ects. Remote Sens. 2018, 10, 354.
11. Houtz, D.; Naderpour, R.; Schwank, M.; Ste?en, K. Snow wetness and density retrieved from L-band satelliteradiometer observations over a site in the West Greenland ablation zone. Remote Sens. Environ. 2019,235, 111361.
12. Schwank, M.; Matzler, C.; Wiesmann, A.; Wegmuller, U.; Pulliainen, J.; Lemmetyinen, J.; Rautiainen, K.;Derksen, C.; Toose, P.; Drusch, M. Snow Density and Ground Permittivity Retrieved from L-Band Radiometry:A Synthetic Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3833–3845.
13. Rautiainen, K.; Parkkinen, T.; Lemmetyinen, J.; Schwank, M.; Wiesmann, A.; Ikonen, J.; Derksen, C.;Davydov, S.; Davydova, A.; Boike, J. SMOS prototype algorithm for detecting autumn soil freezing.Remote Sens. Environ. 2016, 180, 346–360.
14. Rautiainen, K.; Lemmetyinen, J.; Schwank, M.; Kontu, A.; Menard, C.B.; Matzler, C.; Drusch, M.; Wiesmann, A.;Ikonen, J.; Pulliainen, J. Detection of soil freezing from L-band passive microwave observations. Remote Sens.Environ. 2014, 147, 206–218.
15. Kaleschke, L.; Tian-Kunze, X.; Maass, N.; Makynen, M.; Drusch, M. Sea ice thickness retrieval from SMOSbrightness temperatures during the Arctic freeze-up period. Geophys. Res. Lett. 2012, 39.
16. Acevo-Herrera, R.; Aguasca, A.; Bosch-Lluis, X.; Camps, A.; Martínez-Fernández, J.; Sánchez-Martín, N.;Pérez-Gutiérrez, C. Design and ?rst results of an UAV-borne L-band radiometer for multiple monitoringpurposes. Remote Sens. 2010, 2, 1662–1679.
17. McIntyre, E.M.; Gasiewski, A.J. An ultra-lightweight L-band digital Lobe-Di?erencing Correlation Radiometer(LDCR) for airborne UAV SSS mapping. In Proceedings of the 2007 IEEE International Geoscience andremote sensing Symposium, Barcelona, Spain, 23 July 2007; pp. 1095–1097.
18. Davenport, I.J.; Fernández-Gálvez, J.; Gurney, R.J. A sensitivity analysis of soil moisture retrieval from thetau-omega microwave emission model. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1304–1316.
19. Mo, T.; Choudhury, B.J.; Schmugge, T.J.; Wang, J.R.; Jackson, T.J. A Model for Microwave Emission fromVegetation-Covered Fields. J. Geophys. Res. Ocean. Atmos. 1982, 87, 1229–1237.
20. Naderpour, R.; Houtz, D.; Schwank, M. Snow Wetness Retrieved from Close-Range L-band Radiometry inthe Western Greenland Ablation Zone. J. Glaciol. 2020, in press.
21. De Roo, R.D.; Ruf, C.S.; Sabet, K. An L-band radio frequency interference (RFI) detection and mitigationtestbed for microwave radiometry. In Proceedings of the 2007 IEEE International Geoscience and RemoteSensing Symposium, Barcelona, Spain, 23 July 2007; pp. 2718–2721.
22. Application Notes. 57-1: Fundamentals of RF and Microwave Noise Figure Measurements. 2000. Availableonline: https://www.keysight.com/ch/de/assets/7018-06808/application-notes/5952-8255.pdf (accessed on24 July 2020).
23. Schwank, M.; Wiesmann, A.; Werner, C.; Matzler, C.; Weber, D.; Murk, A.; Volksch, I.; Wegmuller, U. ELBARAII, an L-band radiometer system for soil moisture research. Sensors 2010, 10, 584–612.
24. Pellarin, T.; Wigneron, J.P.; Calvet, J.C.; Berger, M.; Douville, H.; Ferrazzoli, P.; Kerr, Y.H.; Lopez-Baeza, E.;Pulliainen, J.; Simmonds, L.P.; et al. Two-year global simulation of L-band brightness temperatures overland. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2135–2139.
25. Le Vine, D.M.; Abraham, S. Galactic noise and passive microwave remote sensing from space at L-band.IEEE Trans. Geosci. Remote Sens. 2004, 42, 119–129.
26. Sobjaerg, S.S.; Skou, N.; Balling, J.E. Measurements on active cold loads for radiometer calibration. IEEE Trans.Geosci. Remote Sens. 2009, 47, 3134–3139.
27. de la Jarrige, E.L.; Escotte, L.; Goutoule, J.; Gonneau, E.; Rayssac, J. SiGe HBT-based active cold load forradiometer calibration. IEEE Microw. Wirel. Compon. Lett. 2010, 20, 238–240.
28. Naderpour, R.; Schwank, M.; Matzler, C. Davos-Laret Remote Sensing Field Laboratory: 2016/2017 WinterSeason L-Band Measurements Data-Processing and Analysis. Remote Sens. 2017, 9, 1185.
29. Racette, P.; Lang, R.H. Radiometer design analysis based upon measurement uncertainty. Radio Sci. 2005, 40,1–22.
30. Ku, H.H. Notes on the use of propagation of error formulas. J. Res. Natl. Bur. Stand. 1966, 70, 263–273.
31. Randa, J.P. Uncertainties in NIST Noise-Temperature Measurements. In Technical Note (NIST TN)-1502; 1998.Available online: https://www.nist.gov/publications/uncertainties-nist-noise-temperature-measurements(accessed on 24 July 2020).
32. Majurec, N.; Park, J.; Niamsuwan, N.; Frankford, M.; Johnson, J.T. Airborne L-band RFI observations inthe smapvex08 campaign with the L-band interference suppressing radiometer. In Proceedings of the 2009IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12 July 2009;pp. 158–161.
33. Guner, B.; Johnson, J.T.; Niamsuwan, N. Time and frequency blanking for radio-frequency interferencemitigation in microwave radiometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3672–3679.
34. Tarongi, J.M.; Camps, A. Normality analysis for RFI detection in microwave radiometry. Remote Sens. 2010,2, 191–210.
35. Lahtinen, J.; Ruokokoski, T.; Kristensen, S.S.; Skou, N. Intelligent Digital Back-End for Real-Time RFI Detection andMitigation in Microwave Radiometry. 2011. Available online: https://www.researchgate.net/publication/268063678_Intelligent_Digital_Back-End_for_RealTime_RFI_Detection_and_Mitigation_in_Microwave_Radiometry(accessed on 24 July 2020).
36. Munoz-Sabater, J.; de Rosnay, P.; Jimenez, C.; Isaksen, L.; Albergel, C. SMOS brightness temperature angularnoise: Characterization, ?ltering, and validation. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5827–5839.
37. McMullan, K.; Brown, M.A.; Martín-Neira, M.; Rits, W.; Ekholm, S.; Marti, J.; Lemanczyk, J. SMOS:The payload. IEEE Trans. Geosci. Remote Sens. 2008, 46, 594–605.
審核編輯 黃宇
-
L波段
+關注
關注
0文章
16瀏覽量
10982
發布評論請先 登錄
相關推薦
基于MSP430F149型FLASH單片機實現微波輻射成像系統的設計
紫外線輻射計的工作原理及應用
采用單片機實現微波輻射計數控單元
基于51單片機控制的高精度微波輻射計天線伺服系統
新型ADC在便攜式太陽輻射計中的應用

一種簡便的全極化微波輻射計天線方向圖校正算法

以FPGA為核心進行微波輻射計數控系統設計的整體方案詳解

天線轉動的微波輻射計數控單元設計
微波輻射計定標注入噪聲特性分析與校正

通過超低功耗FLASH單片機實現微波輻射成像系統的設計





 工商網監
工商網監
評論