 智能駕駛數據采集回注測評工具 - ARS
智能駕駛數據采集回注測評工具 - ARS
概述
在數據驅動智能駕駛的時代背景下,開發者們總結了一條適用于智能駕駛的數據閉環開發流程,這條開發線路大致包括實車數據采集->數據存儲->數據處理->數據分析->數據標注->模型訓練->仿真測試->實車測試->部署發布等關鍵環節,通過不斷開發迭代,逐步完善智能駕駛的能力。
INTEWORK-ARS是經緯恒潤自主研發的智能駕駛數據閉環工具,具有多個軟件模塊。
產品功能
產品功能詳解
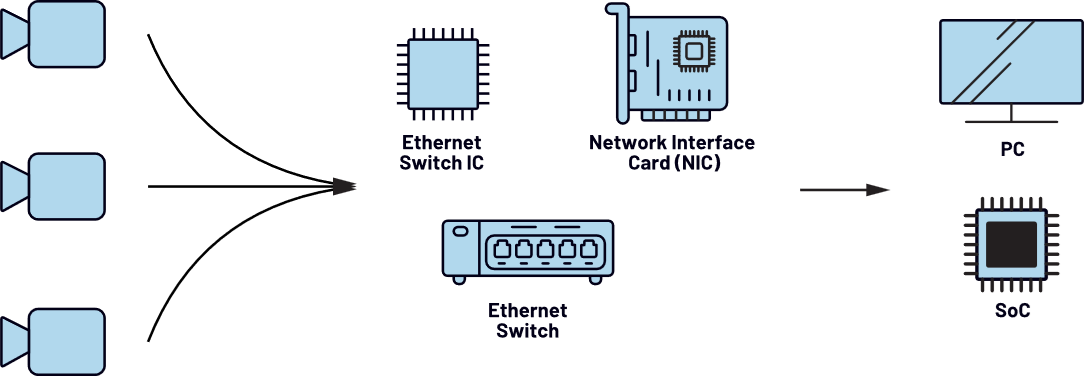
- 智能駕駛數據采集
該功能可以采集各類智能駕駛相關數據,支持滿足城市NOA的主流數據采集需求,支持定制化的傳感器配置:
— 高清相機:GMSL\ETH\USB,覆蓋1~8M像素,RAW\YUV\GRB數據,H.264/ H.265編碼
—激光雷達:支持各類車載激光雷達數據采集
—組合導航、毫米波雷達等其他傳感器
—各控制器外發數據,如SOME/IP、UDP、CAN/CANFD等
—支持多傳感器精確的時間同步,如多相機同步曝光、激光雷達與相機同步控制
—支持車輛傳感器控制器正常工作的情況下進行數據分流采集
—支持數據回傳云端平臺,支持云端平臺進行遠程采集配置
—支持基于控制器、工控機等多平臺部署
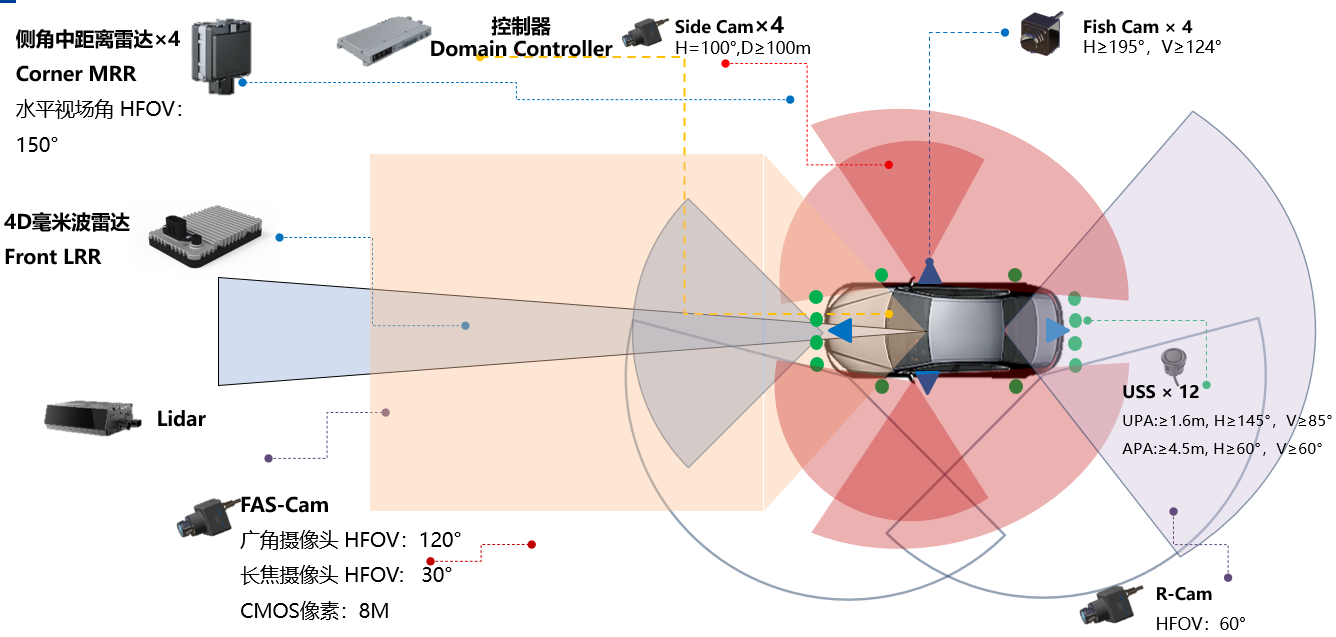
圖1城市NOA功能主流傳感器采集配置
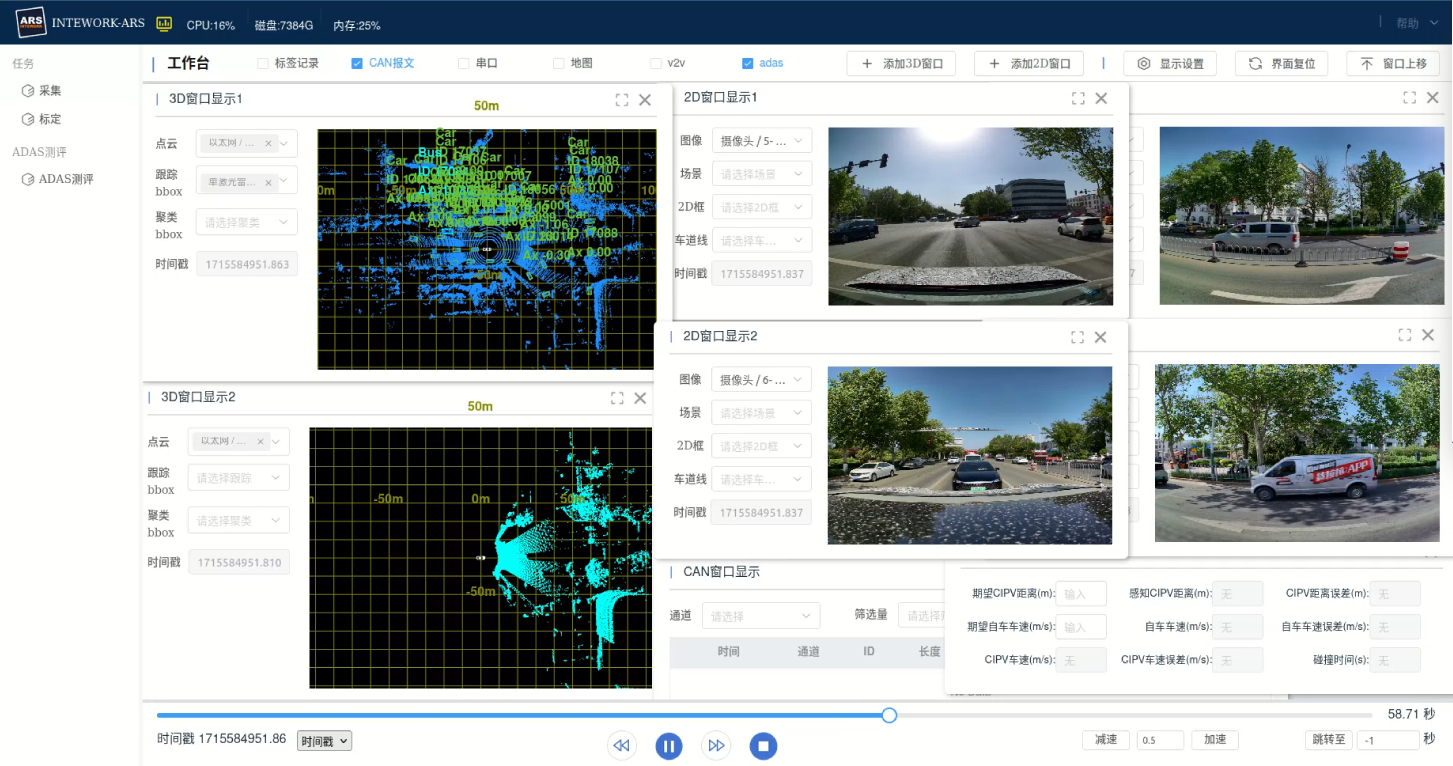
圖2數據采集系統軟件
- 傳感器標定
可以便捷地通過可視化交互,對相機、雷達、多傳感器間的相關參數進行標定,獲得標定數據及文件,滿足在線及離線使用需求。結合高精確時間同步能力,標定參數可滿足BEV算法標注使用。
—激光雷達外參數標定
—多激光雷達標定
—相機內外參數標定
—激光雷達與相機聯合標定
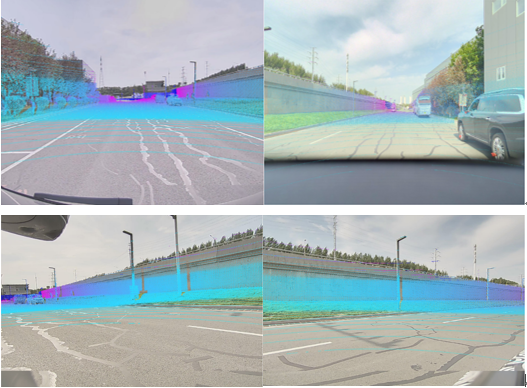
圖3傳感器標定
- 結構化數據生成
可以生成結構化數據包括雷達點云幀文件、相機抽幀圖像,數據時間戳及時間對應關系,場景標簽,目標級數據標簽等,用于后續的數據閉環流程。
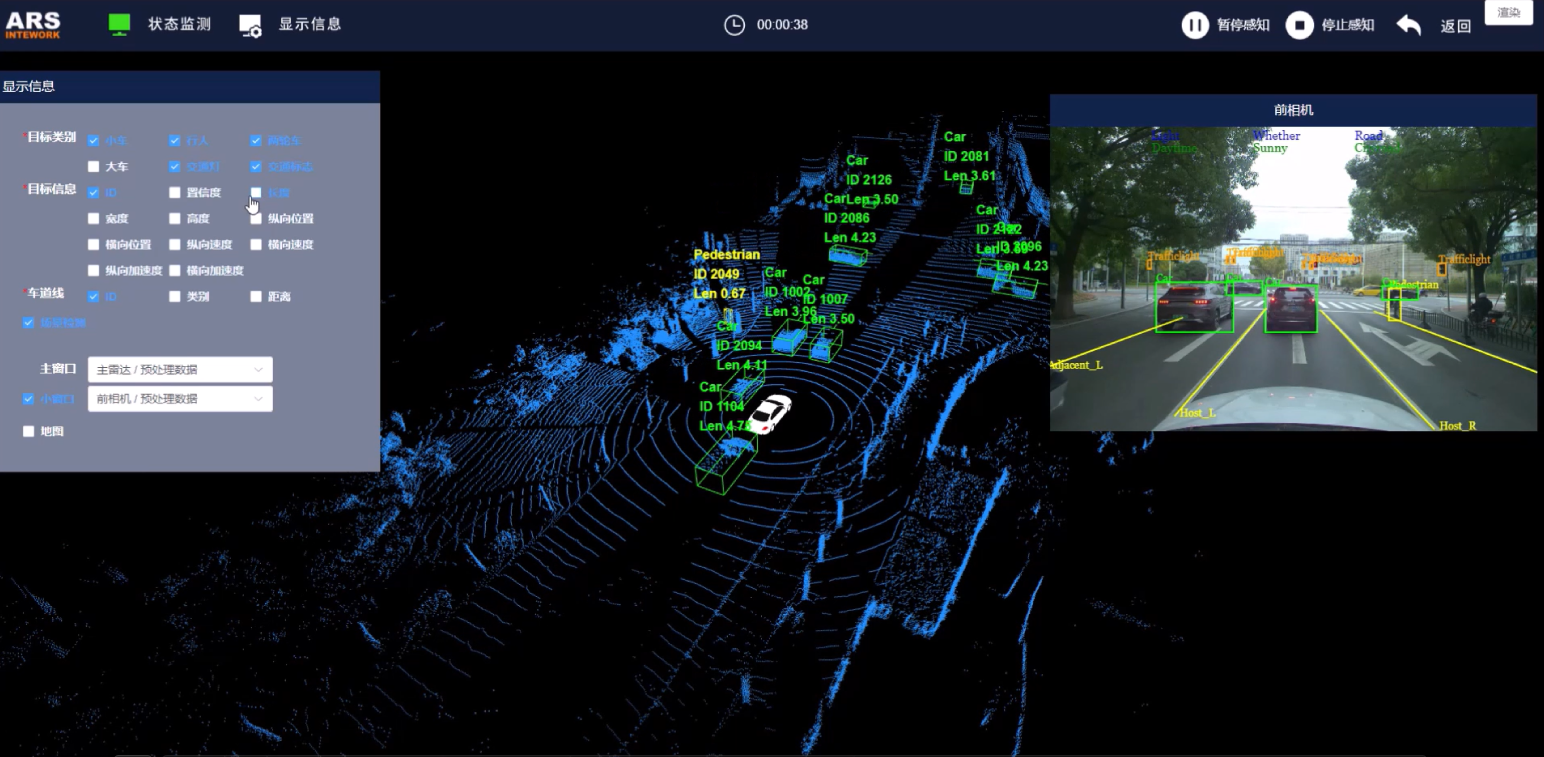
圖4結構化數據生成
- 數據標注
可以對3D點云數據和圖像數據進行目標標注,對目標信息進行交互式增刪改查,生成標簽數據,用于使用者后續的訓練、測試、測評等需求。
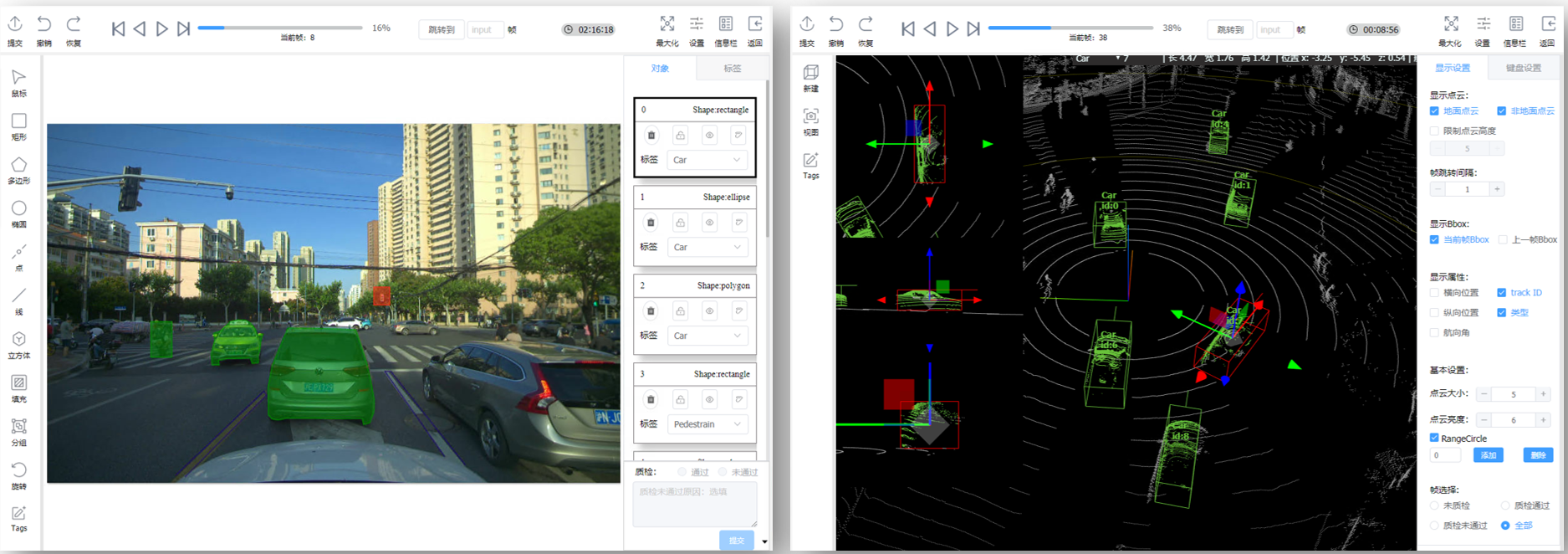
圖5數據標注軟件
- 數據回注模塊
將實車采集的傳感器數據,通過回注硬件,注入給控制器,對Corner Case進行快速迭代測試。
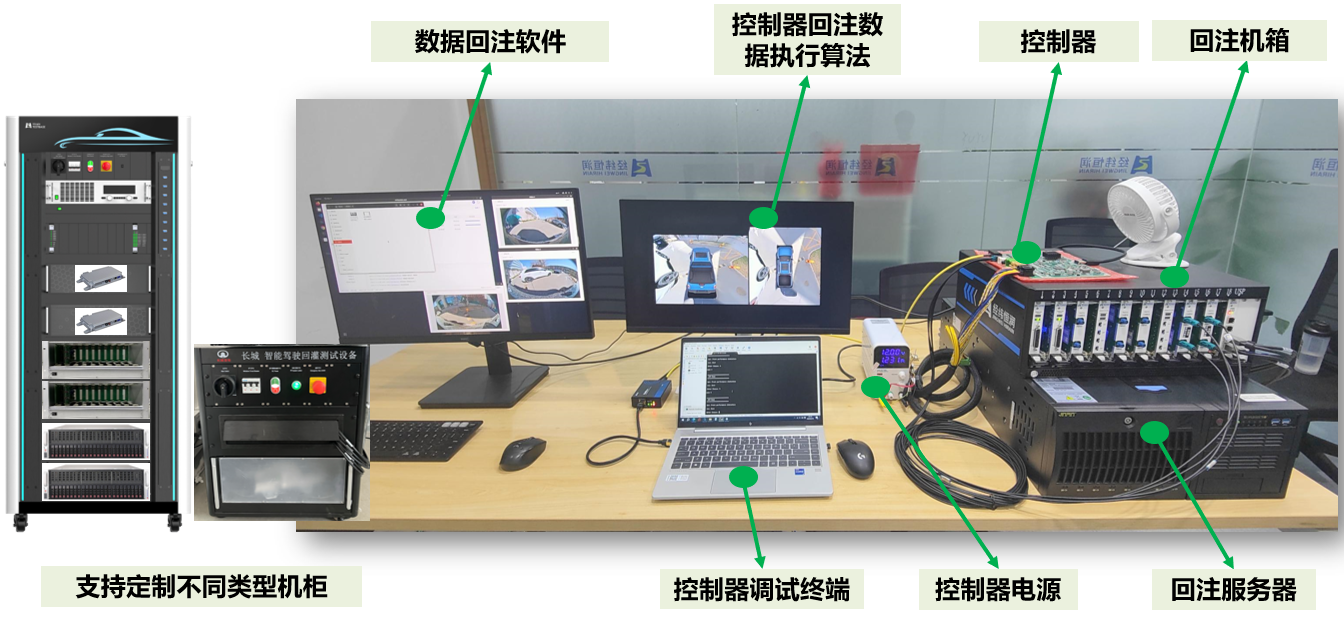
圖6數據回注系統
- 傳感器目標感知能力測評模塊
該模塊可對待測傳感器的目標檢測和跟蹤能力進行快速測評,獲得能力指標,滿足使用者在產品對標,性能驗證等環節的工具需求。
—目標檢測能力
—多目標跟蹤能力
—目標匹配結果
—目標屬性誤差
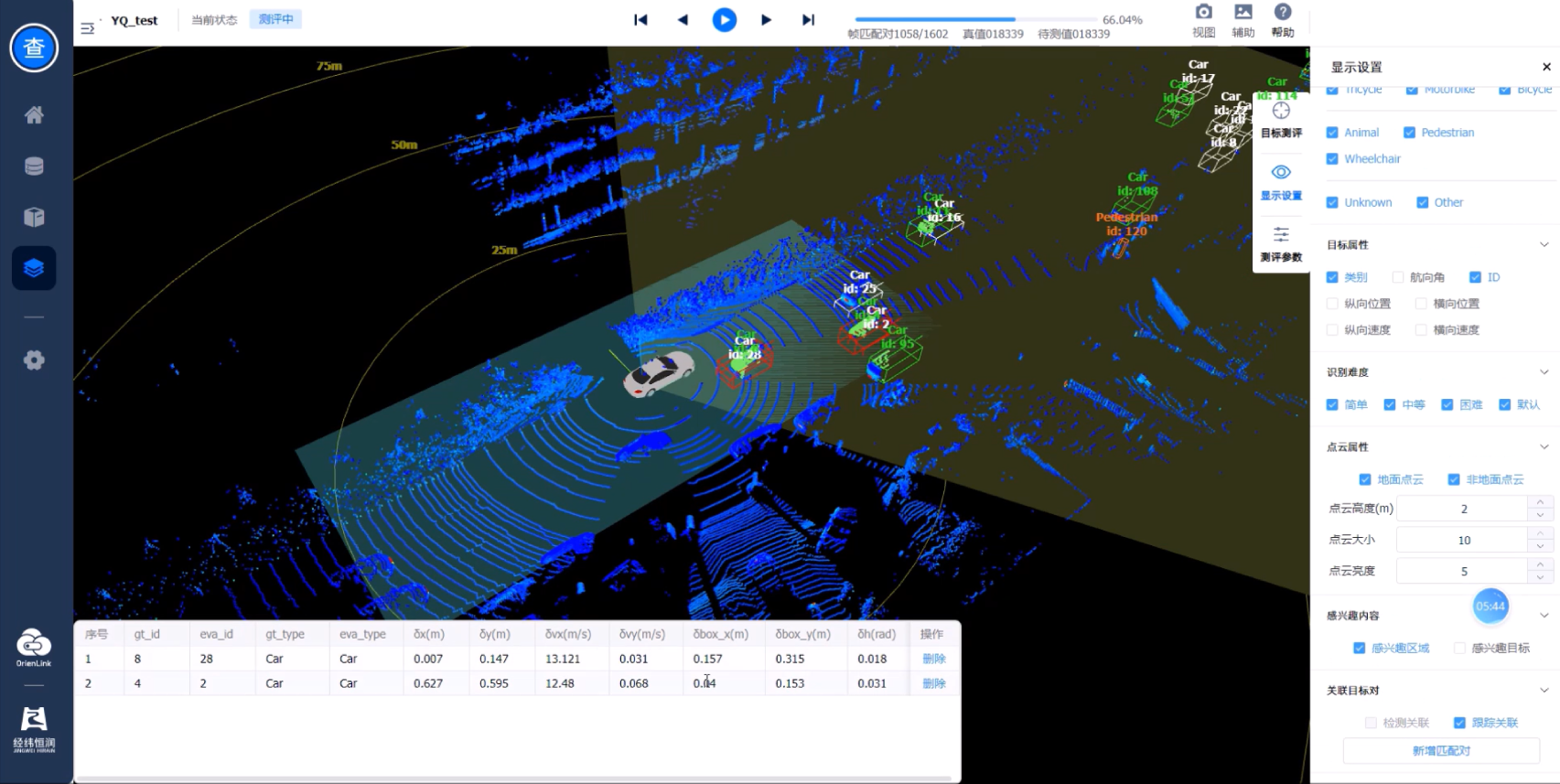
圖7感知測評系統
-
數據采集
+關注
關注
39文章
6203瀏覽量
113834 -
智能駕駛
+關注
關注
3文章
2563瀏覽量
48828
發布評論請先 登錄
相關推薦
上海第一批自動駕駛大模型訓練數據采集車正式發車
數據采集器在智能家居中的應用
康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案

IOT數據采集平臺的功能特點
CNC數據采集智能網關是什么
友思特應用 多接口的智駕無憂:GigE相機在自動駕駛數據采集系統的穩定應用
數據采集處理設備是什么?數據采集處理設備的功能
標貝數據采集標注在自動駕駛場景中落地應用實例

機床數據采集網關的功能特點及應用價值

數據采集邊緣網關解決企業數據采集痛點的關鍵
工業智能網關在機械設備數據采集中的應用
工業智能網關在設備數據采集中的應用






 工商網監
工商網監
評論