") 新能源汽車VCU電控開(kāi)發(fā)——能量回收模塊
新能源汽車VCU電控開(kāi)發(fā)——能量回收模塊
一、概述
VCU(Vehicle Control Unit,整車控制器)能量回收功能是新能源汽車(如純電動(dòng)汽車和混合動(dòng)力汽車)中非常重要的一個(gè)環(huán)節(jié)。它主要是在車輛減速或制動(dòng)過(guò)程中,將車輛的部分動(dòng)能轉(zhuǎn)化為電能,并存儲(chǔ)在電池中,從而提高車輛的能量利用效率。能量回收的本質(zhì)是根據(jù)整車狀態(tài)計(jì)算出能量回收扭矩(TER,TorqueEnergyRecovery并進(jìn)行輸出,可分為能量回收使能(EnergyRecycleEnable)、能量回收扭矩請(qǐng)求(EnergyRecycleTorqueRequest)和能量回收扭矩限制(EnergyRecycleTorqueLimit)三個(gè)子模塊。

能量回收使能模塊是指 VCU 根據(jù)整車上電狀態(tài)、車速、擋位、電池 SOC 值、ABS 狀態(tài)、加速踏板狀態(tài)和剎車狀態(tài)等來(lái)判斷是否進(jìn)行能量回收;能量回收扭矩請(qǐng)求模塊是指 VCU確定進(jìn)行能量回收后,根據(jù)能量回收等級(jí)、能量回收模式、當(dāng)前車速和擋位計(jì)算出的能量回收扭矩值;能量回收扭矩限制模塊主要從 DCDC 和電池所允許的最大充電功率、電機(jī)特性兩個(gè)方面對(duì)能量回收扭矩進(jìn)行限制。
二、術(shù)語(yǔ)及縮寫
| 英文縮寫 | 英文全稱 | 中文名稱 |
| VCU | Vehicle Control Unit | 整車控制器 |
| BMS | Battery Management System | 電池管理系統(tǒng) |
| MCU | Motor Control Unit | 電機(jī)控制單元 |
| ESC | Electronic Stability Program | 電子穩(wěn)定系統(tǒng) |
| GSM | Electronic Gear Select Module | 電子換擋器 |
| OBC | On-Board Charger | 車載充電機(jī) |
| BCM | Body Control Management | 車身控制系統(tǒng) |
| OBD | On-Board Diagnostics | 車載診斷系統(tǒng) |
| DCDC | Direct Current Direct Current | 直流-直流轉(zhuǎn)換器 |
| T-BOX | Telematics BOX | 遠(yuǎn)程信息處理器 |
| EPS | Electric Power Steering | 電動(dòng)助力轉(zhuǎn)向 |
三、功能要求
VCU 能量回收功能規(guī)范的功能要求通常包括以下幾個(gè)方面:能量回收策略制定與執(zhí)行、能量回收效率優(yōu)化、系統(tǒng)協(xié)同與安全保障
1)能量回收策略制定與執(zhí)行
滑行能量回收:當(dāng)駕駛員松開(kāi)加速踏板,車輛進(jìn)入滑行狀態(tài)時(shí),VCU 應(yīng)能根據(jù)車速、電池 SOC(State of Charge,荷電狀態(tài))等條件判斷是否開(kāi)啟能量回收。例如,在較高車速下(如大于 30km/h),如果電池 SOC 低于設(shè)定閾值(如 80%),則開(kāi)啟一定強(qiáng)度的滑行能量回收。回收強(qiáng)度可以根據(jù)車輛的設(shè)計(jì)和駕駛模式的不同而有所變化,一般可以通過(guò)調(diào)整電機(jī)的發(fā)電扭矩來(lái)實(shí)現(xiàn)不同程度的能量回收。
制動(dòng)能量回收:在車輛制動(dòng)過(guò)程中,VCU 需要協(xié)調(diào)制動(dòng)系統(tǒng)和驅(qū)動(dòng)電機(jī),實(shí)現(xiàn)制動(dòng)能量回收。它要區(qū)分機(jī)械制動(dòng)和電制動(dòng)的比例,這通常通過(guò)制動(dòng)踏板傳感器來(lái)獲取制動(dòng)意圖。例如,在輕踩制動(dòng)踏板時(shí),優(yōu)先使用電制動(dòng)進(jìn)行能量回收;當(dāng)制動(dòng)踏板行程較大,需要更大的制動(dòng)力時(shí),機(jī)械制動(dòng)和電制動(dòng)同時(shí)工作,并且隨著制動(dòng)強(qiáng)度的增加,機(jī)械制動(dòng)的比例逐漸增大,電制動(dòng)的比例相應(yīng)減小,以保證車輛的制動(dòng)安全。
2)能量回收效率優(yōu)化
VCU 應(yīng)確保能量回收系統(tǒng)具有較高的回收效率。這涉及到電機(jī)的發(fā)電效率、傳動(dòng)系統(tǒng)的能量傳遞效率以及電池的充電效率等多個(gè)環(huán)節(jié)。例如,電機(jī)在發(fā)電過(guò)程中會(huì)有能量損耗,一般高效的電機(jī)發(fā)電效率能達(dá)到 80% - 90% 左右。VCU 需要通過(guò)優(yōu)化控制策略,如調(diào)整電機(jī)的轉(zhuǎn)速 - 扭矩工作點(diǎn),使電機(jī)工作在高效發(fā)電區(qū)域,從而提高整體的能量回收效率。同時(shí),傳動(dòng)系統(tǒng)的設(shè)計(jì)也很關(guān)鍵,低摩擦的傳動(dòng)部件有助于減少能量損失。
3)系統(tǒng)協(xié)同與安全保障
與動(dòng)力系統(tǒng)協(xié)調(diào):VCU 要與驅(qū)動(dòng)電機(jī)緊密配合。在能量回收過(guò)程中,驅(qū)動(dòng)電機(jī)從驅(qū)動(dòng)狀態(tài)切換到發(fā)電狀態(tài),VCU 需要準(zhǔn)確控制電機(jī)的扭矩反轉(zhuǎn)時(shí)間和大小。例如,在從加速狀態(tài)突然轉(zhuǎn)換到滑行能量回收狀態(tài)時(shí),VCU 要確保電機(jī)扭矩的平穩(wěn)過(guò)渡,避免車輛出現(xiàn)頓挫感。同時(shí),對(duì)于混合動(dòng)力汽車,還需要協(xié)調(diào)發(fā)動(dòng)機(jī)和電機(jī)之間的工作模式,當(dāng)發(fā)動(dòng)機(jī)工作時(shí),也要考慮如何合理地利用電機(jī)進(jìn)行能量回收。
與電池管理系統(tǒng)協(xié)調(diào):能量回收的電能要存儲(chǔ)到電池中,VCU 需要和電池管理系統(tǒng)(BMS)通信。BMS 負(fù)責(zé)監(jiān)控電池的狀態(tài),如電池溫度、SOC 等。VCU 在進(jìn)行能量回收時(shí),要根據(jù) BMS 提供的信息,判斷電池是否能夠接收回收的電能。例如,如果電池溫度過(guò)高(如超過(guò) 45℃)或者 SOC 已經(jīng)接近滿電狀態(tài)(如大于 95%),VCU 應(yīng)該減少或停止能量回收,以保護(hù)電池的安全和壽命。
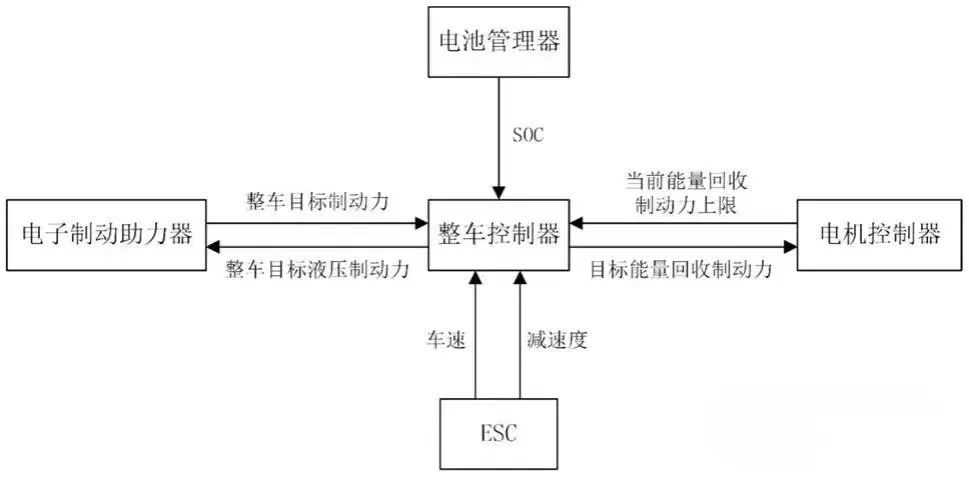
四、系統(tǒng)組成
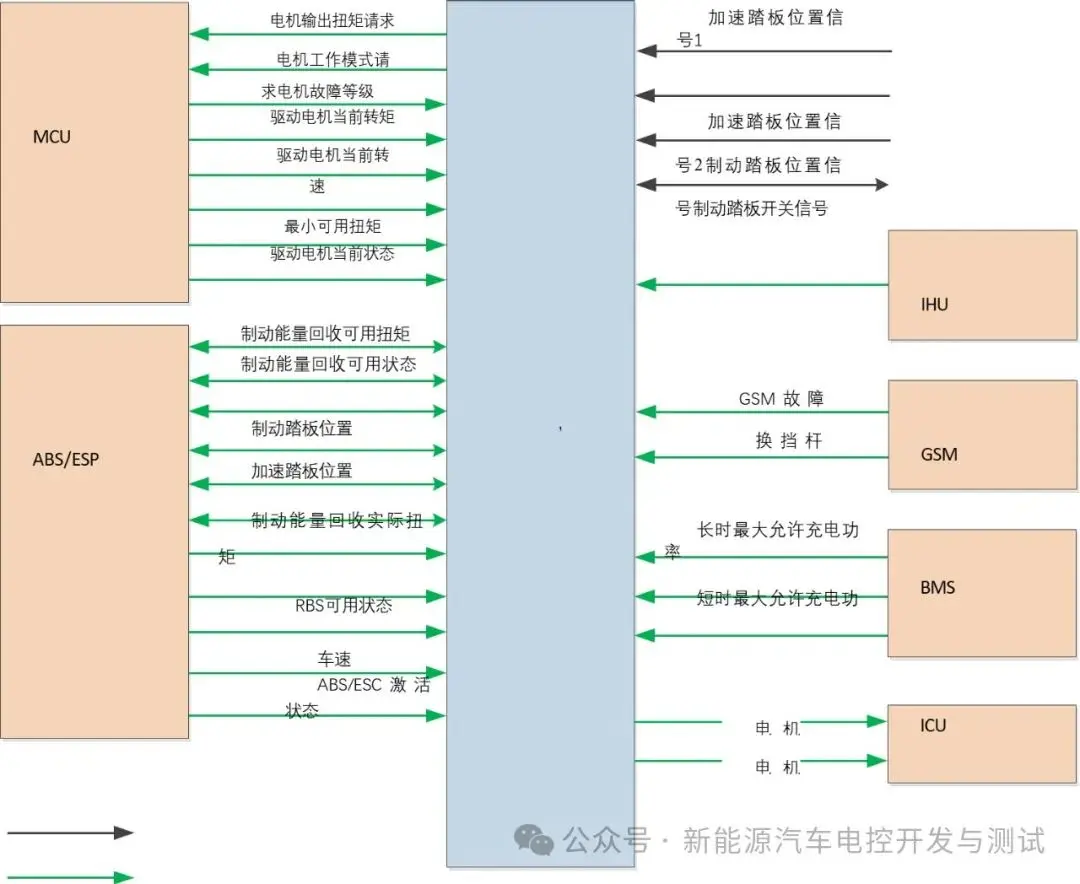
硬線信號(hào)
總線信號(hào)
部件功能說(shuō)明
| 序號(hào) | 部件名稱 | 部件功能描述 |
| 1 | VCU | 接收檔位信號(hào),加速踏板行程信號(hào),制動(dòng)踏板開(kāi)關(guān)信號(hào),制動(dòng)踏板位置信號(hào)與 BMS 反饋的高壓電池系統(tǒng)狀態(tài),計(jì)算最大回饋扭矩,并通過(guò)總線發(fā)送至ABS/ESC |
| 2 | BMS | 通過(guò)CAN 總線向VCU 反饋高壓電池系統(tǒng)電壓,SOC,最大充電電流等參數(shù) |
| 3 | MCU | 執(zhí)行VCU 請(qǐng)求扭矩,發(fā)送當(dāng)前電機(jī)狀態(tài) |
| 4 | GSM | 發(fā)送換擋桿位置信息 |
| 5 | ICU | 接收VCU 發(fā)送電機(jī)功率信號(hào)并進(jìn)行指示 |
| 6 | ABS/ESC | 根據(jù)VCU 反饋的系統(tǒng)回收能力參數(shù),執(zhí)行制動(dòng)扭矩分配,計(jì)算電機(jī)回饋扭矩并發(fā)送至總線 |
| 7 | IHU | 駕駛員能量回收開(kāi)關(guān)請(qǐng)求 |
4.1能量回收功能
4.11滑行能量回收
接口信號(hào)
1)輸入量
| 信號(hào)名稱 | 通訊矩陣信號(hào)名稱 | 信號(hào)描述 | 信號(hào)類型 |
| VeCANR_b_RgnSwtch | IHU_Regen_Switch | 能量回收開(kāi)關(guān) | CAN 信號(hào) |
| VeCANR_b_RgnSwtchVld | IHU_Regen_Switch_Valid | 能量回收控制開(kāi)關(guān)有效性信號(hào) | CAN 信號(hào) |
| VeSGCR_b_AccnPedSt | --- | 加速踏板開(kāi)度 | 內(nèi)部信號(hào) |
| VeSGCR_pct_BrkPed | --- | 制動(dòng)踏板開(kāi)度 | 內(nèi)部信號(hào) |
| VeSGCR_b_BrkPedSt | --- | 制動(dòng)踏板狀態(tài) | 內(nèi)部信號(hào) |
| VeGRMR_st_GrPstnOut | VCU_ActualGearPosition | 實(shí)際檔位狀態(tài) | CAN 信號(hào) |
| VeSGCR_v_VehSpd | --- | 車速 | 內(nèi)部信號(hào) |
| VeCRUR_st_CruzMode | --- | 定速巡航模式 | 內(nèi)部信號(hào) |
| VeTQRR_b_ACCTqCtrlActv | --- | ACC 功能激活 | 內(nèi)部信號(hào) |
| VeTQRR_b_PASTqCtrlActv | --- | 自動(dòng)泊車功能激活 | 內(nèi)部信號(hào) |
| VeCANR_trq_MtrMinAvlTq | MCU_MinAvlTq | 電機(jī)最小可用扭矩 | CAN 信號(hào) |
| VeCANR_Pwr_BatMaxChrgInstns | BMS_AllowedMaxPeakFBPower | 電池峰值回收功率 | CAN 信號(hào) |
2)輸出量
| 信號(hào)名稱 | 信號(hào)描述 | 信號(hào)類型 |
| VeTQRR_trq_CstTqReq | 滑行需求扭矩 | 內(nèi)部信號(hào) |
3)標(biāo)定量
| 信號(hào)名稱 | 信號(hào)描述 | 初始值(時(shí)間單位默認(rèn)10ms) |
| KeTQRR_Pwr_RgnAllwThres | 回收允許電池功率閥值 | 20KW |
| KeTQRR_trq_RgnAllwThres | 回收允許電機(jī)扭矩閥值 | 80Nm |
| KeTQRR_v_CstRgnEntSpd | 滑行回收進(jìn)入車速 | 8Km/h |
| KeTQRR_v_CstRgnExtSpd | 滑行回收退出車速 | 7Km/h |
| KaTQRR_v_CstTqX | 滑行扭矩 X 軸(車速) | --- |
| KaTQRR_trq_CstTqMap | Nrm 模式滑行扭矩 Map | --- |
| Nrm | 值 | |
| KaTQRR_trq_CstTqMapEco | Eco 模式滑行扭矩 Map值 | --- |
| KaTQRR_trq_CstTqMapSpt | Spt 模式滑行扭矩 Map值 | --- |
| KeTQRR_trq_CstBscTq | 滑行基礎(chǔ)扭矩 | 0Nm |
| KaTQRR_fac_CstNom | Nml 模式滑行回收系數(shù) | 1 |
| KaTQRR_fac_CstEco | Eco 模式滑行回收系數(shù) | 1 |
| KaTQRR_fac_CstSpt | Spt 模式滑行回收系數(shù) | 1 |
| KeTQRR_Pct_RgnBtSOCTres | 能量回收的電池包 SOC閥值 | 98% |
滑行扭矩控制
滑行能量回收扭矩根據(jù)車速查表獲得,在不同車輛模式下,需查不同的 Map以保障不同的動(dòng)力性和經(jīng)濟(jì)性需求。為保證駕駛平順性,低車速時(shí)回收扭矩較小,隨車速增大回收扭矩逐漸增大,車速達(dá)到一定值后,滑行能量回收扭矩不再增大(滑行能量回收 Map 中體現(xiàn))。
4.12制動(dòng)能量回收
接口信號(hào)
1)輸入量:
| 信號(hào)名稱 | 通訊矩陣信號(hào)名稱 | 信號(hào)描述 | 信號(hào)類型 |
| VeCANR_b_RgnSwtch | IHU_Regen_Switch | 能量回收開(kāi)關(guān) | CAN 信號(hào) |
| VeSGCR_pct_BrkPed | --- | 制動(dòng)踏板開(kāi)度 | 內(nèi)部變量 |
| VeSGCR_b_BrkPedSt | --- | 制動(dòng)踏板狀態(tài) | 內(nèi)部信號(hào) |
| VeGRMR_st_GrPstnOut | --- | 檔位信號(hào) | 內(nèi)部信號(hào) |
| VeSGCR_v_VehSpd | --- | 車速 | 內(nèi)部信號(hào) |
| VeCANR_trq_MtrMinAvlTq | MCU_MinAvlTq | 電機(jī)最小可用扭矩 | CAN 信號(hào) |
| VeCANR_Pwr_BatMaxChrgInstns | BMS_AllowedMaxPeakFBPower | 電池峰值回收功率 | CAN 信號(hào) |
| VeCANR_b_RBSActv | ABS_RegenBrakeCtrlStatus | RBS 功能激活 | CAN 信號(hào) |
| VeCANR_trq_MtrTq | MCU_MotorPresentTorque | 電機(jī)扭矩 | CAN 信號(hào) |
2)輸出量:
| 信號(hào)名稱 | 通訊矩陣信號(hào)名稱 | 信號(hào)描述 | 信號(hào)類型 |
| LeTQRR_trq_BrkTqReq | -- | 制動(dòng)需求扭矩 | 內(nèi)部信號(hào) |
| VeTQDR_trq_MtrRgnTqMax | VCU_MotorOutputMinTqReq | 電機(jī)回收可用扭矩 | CAN 信號(hào) |
3)標(biāo)定量:
| 信號(hào)名稱 | 信號(hào)描述 | 初始值(時(shí)間單位默認(rèn)10ms) |
| KeTQRR_Pwr_RgnAllwThres | 制動(dòng)允許功率閥值 | 20KW |
| KeTQRR_trq_RgnAllwThres | 制動(dòng)允許扭矩閥值 | 80Nm |
| KeTQRR_v_BrkEntSpd | 制動(dòng)回收進(jìn)入車速 | 7Km/h |
| KeTQRR_v_BrkExtSpd | 制動(dòng)回收退出車速 | 1Km/h |
| KeTQRR_Pct_RgnInBtSOCTres | 能量回收允許的電池包SOC 閥值 | 98% |
| KeTQRR_Pct_RgnExBtSOCTres | 能量回收退出的電池包SOC 閥值 | 99% |
4.2matlab搭建模型
根據(jù)功能規(guī)范我們?cè)?a target="_blank">Simulink中搭建模型
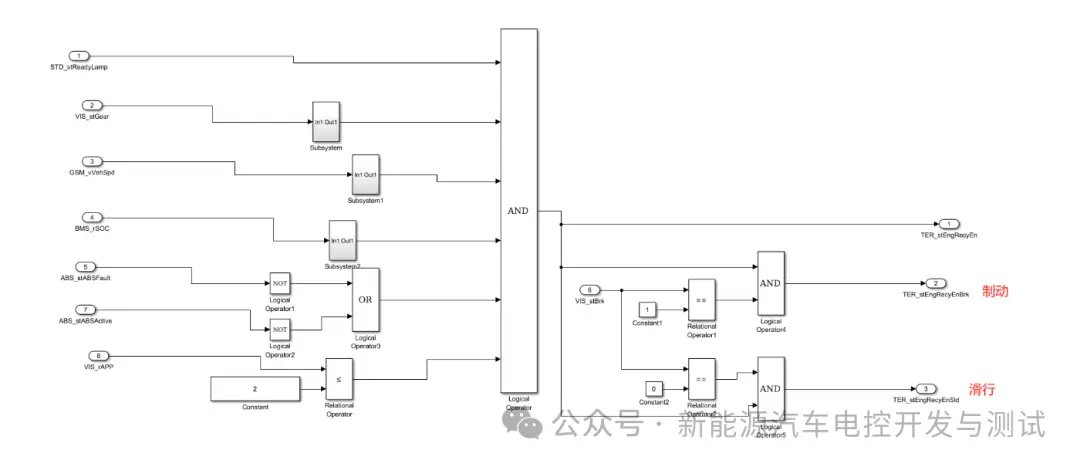
能量回收觸發(fā)條件模型:
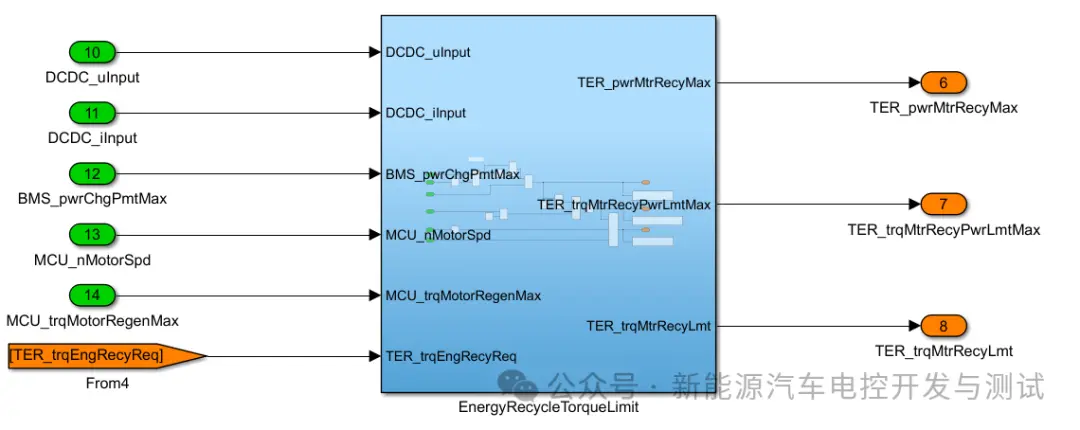
能量回收限制模塊模型:
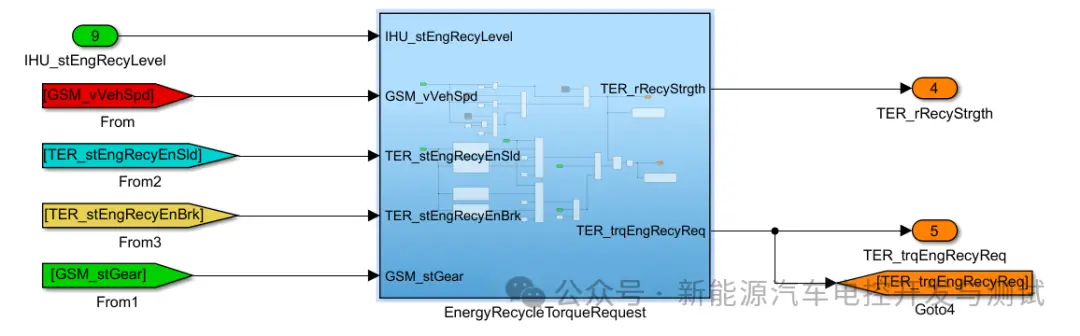
能量回收計(jì)算模塊模型:
來(lái)源:新能源汽車電控開(kāi)發(fā)與測(cè)試
-
新能源汽車
+關(guān)注
關(guān)注
141文章
10606瀏覽量
99911 -
汽車電控
+關(guān)注
關(guān)注
0文章
17瀏覽量
5595 -
VCU
+關(guān)注
關(guān)注
17文章
82瀏覽量
20602
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
新能源汽車核心技術(shù)詳解:電池包和BMS、VCU、 MCU
新能源汽車回收業(yè)務(wù)|新能源汽車電池包回收|新能源汽車電池模組回收|庫(kù)存新能源汽車回收|新能源汽車高價(jià)回收
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
各種電動(dòng)汽車回收,各種新能源汽車回收,各種新能源汽車回收,各種新能源汽車電池模組回收
回收新能源汽車電池包,回收新能源汽車電池 , 回收新能源汽車,18650電池組回收
回收新能源汽車,回收電動(dòng)汽車,回收新能源汽車電池模組,回收新能源汽車電機(jī), 回收新能源汽車軟包電池組
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
分析新能源汽車再生能量回饋
能量回收 對(duì)于電動(dòng)汽車有很大的意義
新能源汽車電控系統(tǒng)VCU開(kāi)發(fā)平臺(tái)的組成結(jié)構(gòu)
電機(jī)能量回收原理
電動(dòng)汽車制動(dòng)能量回收系統(tǒng)的工作原理、組成、實(shí)現(xiàn)過(guò)程及優(yōu)缺點(diǎn)
新能源汽車饋能減振器方案設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論