") 高端MEMS固體波動(dòng)陀螺的發(fā)展歷程、研究現(xiàn)狀、應(yīng)用以及未來(lái)發(fā)展方向
高端MEMS固體波動(dòng)陀螺的發(fā)展歷程、研究現(xiàn)狀、應(yīng)用以及未來(lái)發(fā)展方向
引言
1890年,物理學(xué)家Bryan G H發(fā)現(xiàn)撓性半球可測(cè)量轉(zhuǎn)動(dòng)的Bryan G H理論。1988年美國(guó)加州大學(xué)伯克利分校Muller研究小組發(fā)明了轉(zhuǎn)子直徑為60~100 μm的硅靜電電機(jī)。至此,MEMS陀螺就以其體積小、質(zhì)量輕、功耗低、適于批量化生產(chǎn),而受到各發(fā)達(dá)國(guó)家的重視,紛紛展開研究和應(yīng)用。旋轉(zhuǎn)振動(dòng)結(jié)構(gòu)、旋轉(zhuǎn)盤結(jié)構(gòu)、振動(dòng)盤結(jié)構(gòu)、線振動(dòng)結(jié)構(gòu)、正交線振動(dòng)結(jié)構(gòu)(振動(dòng)平板結(jié)構(gòu)、振動(dòng)梁結(jié)構(gòu)、振動(dòng)音叉結(jié)構(gòu)和加速度計(jì)振動(dòng)結(jié)構(gòu))和非正交線振動(dòng)結(jié)構(gòu)(薄壁半球共振、共振圓柱結(jié)構(gòu)和共振環(huán)結(jié)構(gòu))MEMS陀螺相繼出現(xiàn)。據(jù)國(guó)外研究者分析,按MEMS陀螺不同的工作原理、技術(shù)方案、加工工藝的可能組合選擇方案達(dá)2000種以上。同時(shí),系統(tǒng)技術(shù)的進(jìn)步和工藝水平的提高,也給MEMS慣性技術(shù)的發(fā)展帶來(lái)了新的機(jī)遇,MEMS慣性儀表的性能在很短的幾十年內(nèi)得到了迅速的提高,并不同程度得到廣泛應(yīng)用。其中,消費(fèi)用MEMS陀螺大多采用傳統(tǒng)的音叉結(jié)構(gòu),無(wú)法滿足高精度,特殊環(huán)境下的應(yīng)用需求。
在國(guó)外,軍用高端MEMS陀螺技術(shù)路線和商用MEMS陀螺技術(shù)路線完全不同,軍用高端MEMS陀螺技術(shù)路線,基本都是采用環(huán)境適應(yīng)性好的全對(duì)稱結(jié)構(gòu)。美國(guó)國(guó)防預(yù)先研究計(jì)劃局(DARPA)的微型PNT(Micro-PNT)項(xiàng)目重點(diǎn)支持多環(huán)諧振盤陀螺(DRG)和微半球陀螺(VRG)的研制,取得很好結(jié)果。2015年,DARPA新啟動(dòng)的高級(jí)慣性微傳感器(AIMS)項(xiàng)目,強(qiáng)調(diào)只支持結(jié)構(gòu)上全對(duì)稱的二維或三維的CVG-II型陀螺研制。英國(guó)BAE系統(tǒng)公司在20世紀(jì)90年代開始諧振環(huán)陀螺研制,產(chǎn)品已批量用于APKWS制導(dǎo)炸彈、NLAW反裝甲武器以及155 mm雷神制導(dǎo)炮彈和衛(wèi)星等。它相對(duì)于目前調(diào)諧音叉式、平板振動(dòng)式、殼體振動(dòng)式等MEMS陀螺技術(shù)具有高精度、高動(dòng)態(tài)范圍、抗過(guò)載能力強(qiáng),能直接測(cè)量轉(zhuǎn)動(dòng)角度,避免了后續(xù)積分電路或算法帶來(lái)的動(dòng)態(tài)誤差以及角度和角速率模式之間的切換、便于批量生產(chǎn)等獨(dú)特優(yōu)勢(shì),成為未來(lái)多種中高精度武器載體平臺(tái),尤其是高動(dòng)態(tài)旋轉(zhuǎn)制導(dǎo)炮彈及火箭彈用慣性導(dǎo)航系統(tǒng)的有效技術(shù)。
發(fā)達(dá)國(guó)家始終未停止對(duì)高性能環(huán)形全對(duì)稱結(jié)構(gòu)MEMS慣性器件的研制步伐,已在實(shí)戰(zhàn)中經(jīng)過(guò)檢驗(yàn),實(shí)現(xiàn)了以全對(duì)稱環(huán)形固體波動(dòng)陀螺的“中高精度、低成本、高可靠、大批量、中端軍用”應(yīng)用設(shè)想。而且,新一代高精度硅微半球和全對(duì)稱環(huán)形固體波動(dòng)陀螺及其多陀螺陣列集成技術(shù)正在興起。
01
固體波動(dòng)陀螺到MEMS陀螺的發(fā)展歷程
1固體波動(dòng)理論與哥氏力陀螺
1960年,固體波動(dòng)陀螺經(jīng)歷了金屬半球諧振陀螺(HRG)、石英HRG的研制與升級(jí),又演化為基于MEMS工藝的三維、二維諧振陀螺。最終確立了高端MEMS諧振陀螺的發(fā)展方向與技術(shù)路線。
固體波動(dòng)陀螺的基本原理是:旋轉(zhuǎn)軸對(duì)稱物體(諧振子)中被激勵(lì)的駐波轉(zhuǎn)動(dòng)角與輸入角速率在其對(duì)稱軸上的投影成一定比例。該原理利用了旋轉(zhuǎn)軸對(duì)稱物體中彈性波慣性效應(yīng),即駐波進(jìn)動(dòng)特性。
如圖1所示,質(zhì)量塊P固連在旋轉(zhuǎn)坐標(biāo)系的xoy平面,若沿x軸方向以相對(duì)旋轉(zhuǎn)坐標(biāo)系的速度v運(yùn)動(dòng),旋轉(zhuǎn)坐標(biāo)系繞z軸以角速度ω旋轉(zhuǎn)。在質(zhì)量塊P上哥氏效應(yīng)產(chǎn)生的哥氏力為:Fcor=2m(v×ω)。其中,m為質(zhì)量塊P的質(zhì)量。

圖1 振動(dòng)式陀螺工作原理
可見,哥氏力Fcor與質(zhì)量塊P上的輸入角速度ω成正比,并引起質(zhì)量塊在y軸方向產(chǎn)生的位移(輸入角速度的信息)。概而言之,振動(dòng)陀螺的振動(dòng)部件受驅(qū)動(dòng)而在第一振動(dòng)模態(tài)(又稱驅(qū)動(dòng)模態(tài),如圖1質(zhì)量塊P沿x軸運(yùn)動(dòng)),當(dāng)與第一振動(dòng)模態(tài)垂直的方向有旋轉(zhuǎn)角速度輸入時(shí)(如圖1沿z軸的旋轉(zhuǎn)角速度),振動(dòng)部件因哥氏效應(yīng)產(chǎn)生了一個(gè)垂直第一振動(dòng)模態(tài)的第二振動(dòng)模態(tài)(又稱敏感模態(tài),如圖1質(zhì)量塊P沿y軸產(chǎn)生的位移),該模態(tài)直接與旋轉(zhuǎn)角速度成正比。各類不同結(jié)構(gòu)形式的振動(dòng)陀螺實(shí)際上都是運(yùn)用了同樣原理。
諧振環(huán)式陀螺由振環(huán)、支撐梁及驅(qū)動(dòng)、檢測(cè)控制電極組成,基于對(duì)稱性的考慮需要至少8個(gè)彈簧梁使結(jié)構(gòu)平衡并有2個(gè)相同自然頻率的彎曲模態(tài),如圖2所示。在靜電力(或電磁力)驅(qū)動(dòng)下諧振環(huán)在一個(gè)平面內(nèi)以固定幅值、橢圓形進(jìn)行一階彎曲模態(tài)振動(dòng),當(dāng)它圍繞法線軸旋轉(zhuǎn)時(shí),哥氏力將使得振動(dòng)能量轉(zhuǎn)移到相位差45°的二階檢測(cè)振動(dòng)模態(tài),二階檢測(cè)振動(dòng)模態(tài)的振動(dòng)幅值與輸入角速率成比例,并可以用電容的變化來(lái)檢測(cè)。
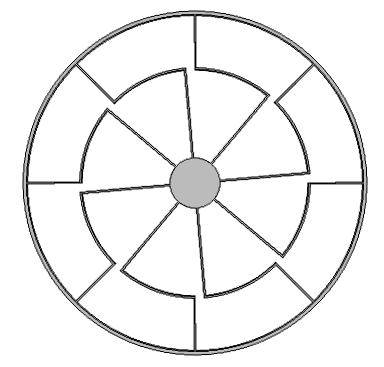
圖2 諧振環(huán)結(jié)構(gòu)陀螺
2從HRG到MEMS平面陀螺的演化
HRG是固體波動(dòng)陀螺的具體實(shí)現(xiàn)。1965年,David L博士完成全對(duì)稱HRG的理論建模分析。1975年,美國(guó)Delco公司研制出世界上第一個(gè)半球諧振陀螺,精度達(dá)50 (°)/h;后來(lái)采用高Q值石英材料,1980年精度達(dá)到1 (°)/h。1996年,利頓公司收購(gòu)Delco公司為美國(guó)哈勃望遠(yuǎn)鏡計(jì)劃研制高性能石英HRG,指標(biāo)為:量程為0.5 (°)/s,零偏穩(wěn)定性為0.00008 (°)/h,角度隨機(jī)游走 0.00001(°)/h1/2。
2000年、2009年、2011年,Kristiansen和Shatalov以及任順清等學(xué)者分別建立了圓柱形諧振陀螺和半球諧振陀螺的等效方程,從而利用簿殼力學(xué)中的能量原理給出了兩種結(jié)構(gòu)振動(dòng)陀螺的動(dòng)力學(xué)方程,為圓柱形諧振陀螺和半球諧振陀螺的研究發(fā)展做出巨大貢獻(xiàn)。
2000年,利頓公司被諾格公司收購(gòu),該公司研制500多個(gè)HRG陀螺分別用于美國(guó)金星探測(cè)和彗星撞擊等重大宇航任務(wù)。研究表明半球諧振陀螺在性能上幾乎沒(méi)有物理限制,發(fā)展?jié)摿艽蟆5肭蛑C振陀螺是三維結(jié)構(gòu),加工工藝復(fù)雜,制造難度大,無(wú)法實(shí)現(xiàn)低成本批量化生產(chǎn)。在發(fā)展過(guò)程中有多種結(jié)構(gòu)變化,衍生出多種二維結(jié)構(gòu),如圖3所示。這些二維結(jié)構(gòu)非常適合目前的MEMS制造工藝,可實(shí)現(xiàn)低成本批量化生產(chǎn)。
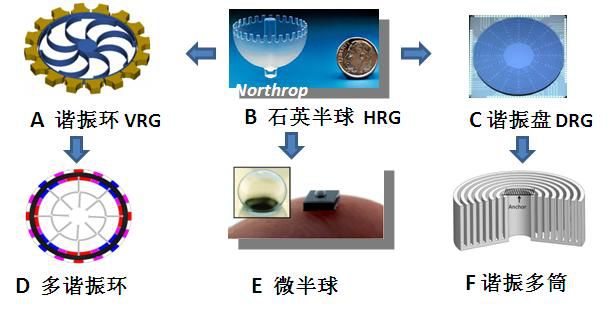
圖3 半球諧振陀螺的發(fā)展與衍變
圖3(A)的諧振環(huán)陀螺是半球陀螺的一種簡(jiǎn)化形式。英國(guó)古德里奇公司、BAE公司(大西洋慣性系統(tǒng)分公司)從早期的金屬筒型結(jié)構(gòu)VSG-1起,始終致力于環(huán)形陀螺的研究,自20世紀(jì)90年代開始諧振環(huán)陀螺的研制,逐漸演進(jìn)至新的壓電材料環(huán)形陀螺VSG-5。其歷代貨架產(chǎn)品CRS03、CRG20、CRM100/200等系列產(chǎn)品占據(jù)世界中高端MEMS陀螺市場(chǎng)很大份額,并應(yīng)用于英、美、瑞典、土耳其等國(guó)的制導(dǎo)彈藥武器。目前已研制到第四代,最新產(chǎn)品陀螺零偏穩(wěn)定性已達(dá)到0.1 (°)/h1/2。
美國(guó)多所大學(xué)也開展了新型全對(duì)稱結(jié)構(gòu)陀螺的研究。其中,密歇根大學(xué)Ayazi博士2000年完成世界第一款MEMS全對(duì)稱環(huán)形陀螺,陀螺零偏穩(wěn)定性達(dá)到5 (°)/h。2008年,Zaman博士進(jìn)行諧振星型結(jié)構(gòu)改進(jìn),陀螺零偏穩(wěn)定性已達(dá)到2.5 (°)/h。圖3(c)為伯克利大學(xué)等幾個(gè)學(xué)校聯(lián)合研制的諧振盤陀螺,直徑0.6 mm、厚度20 μm,樣品精度達(dá)到3.27 (°)/h。圖3(F)是密歇根大學(xué)研發(fā)的多筒諧振速率積分陀螺,諧振頻率為3 kHz,Q值72000,零偏為129 (°)/h,角度隨機(jī)游走系數(shù)達(dá)到0.09 (°)/h1/2。
02
國(guó)外軍用MEMS諧振陀螺研制現(xiàn)狀
1從HRG到MEMS平面陀螺的演化
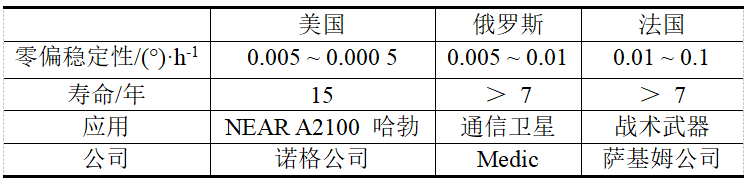
1996年,美國(guó)首次在空間應(yīng)用HRG姿態(tài)敏感單元,約125套累計(jì)飛行2×107h。俄羅斯、法國(guó)等國(guó)發(fā)展迅速,均取得了良好應(yīng)用效果。HRG被國(guó)際慣性界認(rèn)為是21世紀(jì)廣泛用于各類運(yùn)載器捷聯(lián)系統(tǒng)中最理想的器件,國(guó)外HRG對(duì)比如表1所示。
表1 國(guó)外HRG研制水平對(duì)比
2MEMS諧振陀螺研制現(xiàn)狀
MEMS諧振環(huán)陀螺源于石英HRG,是HRG的簡(jiǎn)化結(jié)構(gòu)形式。與HRG相比,除了保持HRG敏感結(jié)構(gòu)全對(duì)稱、高精度、環(huán)境適應(yīng)性好,適合應(yīng)用在性能要求高并且環(huán)境惡劣的航天及軍事等領(lǐng)域外,還具有結(jié)構(gòu)簡(jiǎn)單、可靠、體積小、便于批量化集成制造。目前,諧振環(huán)陀螺已經(jīng)發(fā)展到第四代產(chǎn)品,如圖4所示,逐漸從機(jī)械陀螺轉(zhuǎn)變?yōu)镸EMS硅基陀螺。
第一代諧振環(huán)陀螺
第一代諧振環(huán)陀螺產(chǎn)品采用圓柱殼體的陶瓷結(jié)構(gòu),類似于傳統(tǒng)陀螺,研制平臺(tái)主要為機(jī)械加工平臺(tái)。其特點(diǎn)是敏感結(jié)構(gòu)采用機(jī)械加工手段制備、體積大、敏感信號(hào)強(qiáng)、采用傳統(tǒng)組織工藝技術(shù)。
第二代諧振環(huán)陀螺
第二代諧振環(huán)陀螺產(chǎn)品通過(guò)驅(qū)動(dòng)和檢測(cè)技術(shù)的進(jìn)步簡(jiǎn)化了結(jié)構(gòu),但和第一代產(chǎn)品類似,研制平臺(tái)主要為機(jī)械加工平臺(tái)。
第三代諧振環(huán)陀螺
第三代諧振環(huán)陀螺產(chǎn)品采用了新的MEMS加工技術(shù),通過(guò)電磁激勵(lì)和電流檢測(cè),使陀螺的體積變小,性能得到大幅度提升。其特點(diǎn)是:a)敏感結(jié)構(gòu)采用MEMS技術(shù)加工,并且使用激光修調(diào)技術(shù)對(duì)兩個(gè)諧振模態(tài)間的頻差進(jìn)行調(diào)節(jié)(頻差<1 Hz),通過(guò)兩模態(tài)間的匹配增強(qiáng)能量轉(zhuǎn)換能力,提高器件性能;b)采用微電子封裝技術(shù)(金屬管殼)和傳統(tǒng)組裝技術(shù)(磁芯裝配)的結(jié)合進(jìn)行產(chǎn)品封裝。其研制平臺(tái)是機(jī)械加工平臺(tái)、微電子平臺(tái)和MEMS平臺(tái)的結(jié)合。
第四代諧振環(huán)陀螺
第四代諧振環(huán)陀螺產(chǎn)品采用了全新的MEMS加工技術(shù),去除了陀螺內(nèi)部的磁芯結(jié)構(gòu),通過(guò)電容激勵(lì)、電容檢測(cè)、修調(diào)等技術(shù),使陀螺的性能、體積、功耗等得到大幅度提升。其器件特點(diǎn)是:
a)敏感結(jié)構(gòu)采用MEMS技術(shù)加工;
b)使用修調(diào)技術(shù)對(duì)兩個(gè)諧振模態(tài)間的頻差(<0.1 Hz)進(jìn)行調(diào)節(jié),通過(guò)兩模態(tài)間的匹配增強(qiáng)能量轉(zhuǎn)換能力,提高器件性能;
c)采用專用處理電路和微處理器結(jié)合進(jìn)行信號(hào)檢測(cè)和處理;
d)采用MCM封裝形式進(jìn)行陀螺儀封裝。
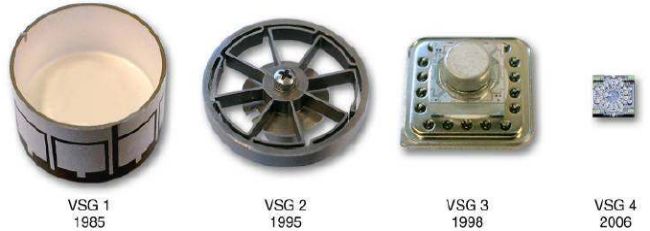
圖4 硅微機(jī)械陀螺儀發(fā)展歷程
第四代諧振環(huán)陀螺研制平臺(tái)是微電子平臺(tái)和MEMS平臺(tái)的結(jié)合,產(chǎn)品的技術(shù)特點(diǎn)也是目前世界上主流MEMS陀螺產(chǎn)品的發(fā)展趨勢(shì),主要特點(diǎn)包括:
a)敏感結(jié)構(gòu)采用高真空封裝,Q值很高;
b)對(duì)敏感結(jié)構(gòu)進(jìn)行調(diào)節(jié),提高敏感結(jié)構(gòu)的固有特性和成品率;
c)采用專用處理電路,提升信號(hào)處理和敏感結(jié)構(gòu)調(diào)節(jié)能力;
d)采用微處理器,提升產(chǎn)品的內(nèi)部補(bǔ)償和環(huán)境適應(yīng)性;
e)采用MCM一體化封裝技術(shù),減小體積,提高穩(wěn)定性;
f)采用系統(tǒng)級(jí)設(shè)計(jì),進(jìn)行敏感結(jié)構(gòu)、處理電路、微處理器、以及封裝等陀螺儀各部分之間的匹配,充分發(fā)揮系統(tǒng)各部分的技術(shù)優(yōu)勢(shì),彌補(bǔ)相互間的技術(shù)瓶頸,實(shí)現(xiàn)系統(tǒng)性能的最大化。
具有上述特點(diǎn)的硅基MEMS陀螺儀已經(jīng)逐步由新興走向成熟,進(jìn)而走向系統(tǒng)集成化道路,實(shí)現(xiàn)MEMS慣性測(cè)量單元(IMU)等系統(tǒng)的應(yīng)用。
英國(guó)BAE系統(tǒng)公司采用MEMS諧振環(huán)陀螺實(shí)現(xiàn)了MEMS IMU系列化,最小體積僅有16 cm3,是目前世界上最小的IMU單元,可以把此IMU植入到士兵的戰(zhàn)靴中,實(shí)現(xiàn)單兵全時(shí)導(dǎo)航。BAE公司MEMS IMU系列化如圖5所示,此類型陀螺具有超高抗高沖擊能力,并且采用數(shù)字閉環(huán)電路控制,通過(guò)改變標(biāo)度因數(shù)控制環(huán)路的參數(shù),其量程在600~12 000 (o)/s的范圍內(nèi)可調(diào)整,零偏穩(wěn)定性<0.1 (°)/h。BAE生產(chǎn)的諧振環(huán)陀螺有角速率和速率積分兩種模式,研制的產(chǎn)品用于高速旋轉(zhuǎn)彈、中程導(dǎo)彈和美國(guó)155 mm制導(dǎo)神箭炮彈等武器系統(tǒng)。ESA研究的空間用MEMS諧振環(huán)陀螺已在2012年Cryosat2衛(wèi)星完成在軌驗(yàn)證,并將用于2018年發(fā)射的火星車(ExoMars rover)。
日本硅傳感系統(tǒng)公司(SSS)一直從事MEMS諧振環(huán)陀螺研制,最新產(chǎn)品零偏穩(wěn)定性優(yōu)于0.06 (°)/h,角度隨機(jī)游走優(yōu)于0.01 (°)/h1/2,是諧振環(huán)陀螺的最高水平。
圖5 BAE系統(tǒng)公司系列化MEMS IMU
3MEMS碟形陀螺研制現(xiàn)狀
MEMS碟形陀螺是目前MEMS陀螺中報(bào)導(dǎo)精度最高的陀螺器件,也是目前最熱門的平面工藝MEMS陀螺結(jié)構(gòu)之一。
早在1994年波音公司研制的半球諧振陀螺就應(yīng)用于波音公司的TDRS HIJ衛(wèi)星上,并于2000年用于第二代TDRS衛(wèi)星,同時(shí)開展MEMS陀螺研制,研制路線如圖6所示。
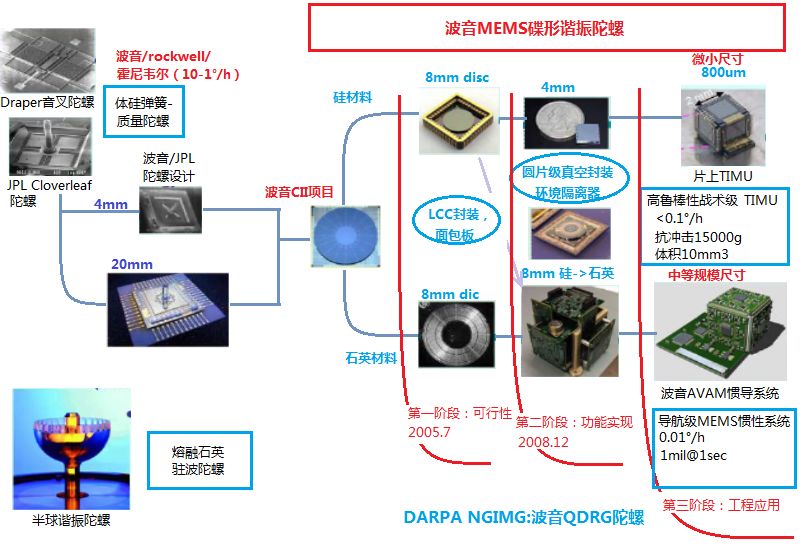
圖6 波音公司高性能MEMS陀螺研制路線圖
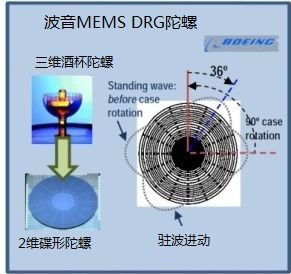
圖7 MEMS 碟形陀螺
基于HRG和其它MEMS陀螺的研制基礎(chǔ),噴氣推進(jìn)實(shí)驗(yàn)室和波音公司把HRG和音叉式MEMS陀螺結(jié)合,提出了多環(huán)結(jié)構(gòu)的MEMS碟形陀螺方案,即多環(huán)諧振盤陀螺。多環(huán)諧振盤陀螺包括一系列的同心圓盤,各同心環(huán)通過(guò)微梁與中心圓盤相連接,如圖7所示。這種多同心環(huán)結(jié)構(gòu)減少了半徑剛度,它的多同心環(huán)設(shè)計(jì)實(shí)現(xiàn)結(jié)構(gòu)的全對(duì)稱性,全對(duì)稱結(jié)構(gòu)的敏感結(jié)構(gòu)可以減少驅(qū)動(dòng)和檢測(cè)模態(tài)的正交耦合,從而實(shí)現(xiàn)硅微陀螺驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)間的匹配。多環(huán)的設(shè)計(jì)不僅大大增加了電極區(qū)域,提高了檢測(cè)和驅(qū)動(dòng)的電容,從而提高了陀螺的檢測(cè)靈敏度,也增加了有效質(zhì)量,而增加有效質(zhì)量對(duì)降低噪聲水平非常關(guān)鍵,采用多環(huán)和多檢測(cè)電極解決了環(huán)陀螺信噪比低的難點(diǎn)。在美國(guó)DARPA導(dǎo)航級(jí)集成微陀螺儀(NGIMG)項(xiàng)目支持下,諧振盤陀螺的研究取得了突破性進(jìn)展,基于8 mm直徑硅材料的諧振盤陀螺實(shí)現(xiàn)了零偏穩(wěn)定性優(yōu)于0.01 (°)/h,角度隨機(jī)游走優(yōu)于0.002(°)/h1/2。為進(jìn)一步縮小和HRG的性能差距,基于8 mm直徑石英玻璃材料或更大直徑的諧振盤陀螺正在研制中。預(yù)期目標(biāo)是諧振盤陀螺的Q值提高一到兩個(gè)數(shù)量級(jí),角度隨機(jī)游走提升一個(gè)數(shù)量級(jí)。
2013年,MEMS諧振盤陀螺研制團(tuán)隊(duì)從波音公司和噴氣推進(jìn)實(shí)驗(yàn)室剝離,成立SIM(Sensor in Motion)公司,專業(yè)從事諧振盤陀螺的研發(fā)與生產(chǎn)。依靠30多年積累的技術(shù)和經(jīng)驗(yàn),生產(chǎn)高性能低成本導(dǎo)航級(jí)諧振盤陀螺,產(chǎn)品代表MEMS陀螺最高水平,達(dá)到激光和光纖陀螺性能。基于諧振盤陀螺的指北儀體積180 cm3,質(zhì)量0.11 kg。
在軍用、航天航空等領(lǐng)域,MEMS陀螺中,諧振環(huán)陀螺和多環(huán)碟形諧振盤陀螺產(chǎn)品化水平最高,并在武器裝備中得到廣泛應(yīng)用。
03
未來(lái)高端MEMS陀螺發(fā)展方向
1美國(guó)高端MEMS陀螺研制計(jì)劃
美國(guó)等西方發(fā)達(dá)國(guó)家非常重視MEMS慣性系統(tǒng)與器件的研制,DARPA針對(duì)MEMS慣性器件的研制制定了很多具體的計(jì)劃,具有重要的參考價(jià)值。其中DARPA MTO在器件級(jí)有兩項(xiàng)陀螺研究項(xiàng)目,一個(gè)為NGIMG,一個(gè)是微速率積分陀螺儀(MRIG)項(xiàng)目。
NGIMG項(xiàng)目主要研發(fā)低功耗微型角速率傳感器,在沒(méi)有GPS信號(hào)時(shí)為單兵、車輛、無(wú)人機(jī)和大型作戰(zhàn)平臺(tái)提供支撐。研究目標(biāo)為:零偏穩(wěn)定性0.01 (°)/h,角度隨機(jī)游走0.001 (°)/h1/2,波音公司多環(huán)諧振盤陀螺,圖3(C)為重點(diǎn)研制方案。
2011年,DARPA啟動(dòng)的MRIG項(xiàng)目專門研制微半球陀螺,如圖3(E)所示,目的是為高動(dòng)態(tài)的空間武器提供支撐。研究目標(biāo)為:量程15000 (°)/s,零偏穩(wěn)定性0.01 (°)/h,刻度因子重復(fù)性0.01ppm。該項(xiàng)目鼓勵(lì)結(jié)構(gòu)創(chuàng)新,美國(guó)有八所大學(xué)參加研制,設(shè)計(jì)了多種創(chuàng)新的結(jié)構(gòu)和3D制作工藝方案。
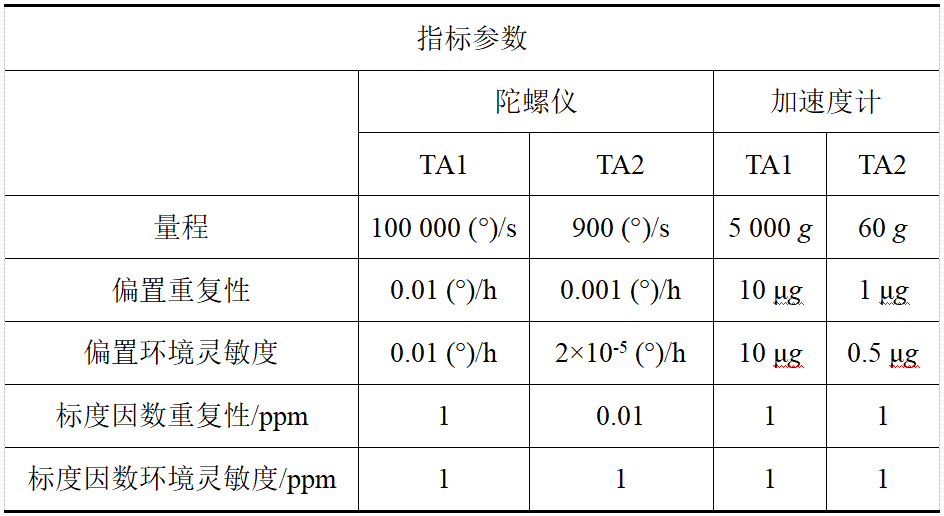
2015年,針對(duì)高級(jí)慣性器件DARPA新啟動(dòng)精確魯棒慣性制導(dǎo)彈藥(PRIGM)項(xiàng)目,研制高級(jí)新型低SWaP+C先進(jìn)慣性微傳感器(AIMS),滿足在高沖擊和高振動(dòng)環(huán)境,具有高動(dòng)態(tài)范圍、低噪音、高精度的慣性器件,詳細(xì)指標(biāo)如表2和表3所示。其中,TA1為高動(dòng)態(tài)環(huán)境器件指標(biāo),TA2為高精度和高穩(wěn)定性器件指標(biāo)。
表2 DARPA高級(jí)慣性微傳感器AIMS研制指標(biāo)(a)
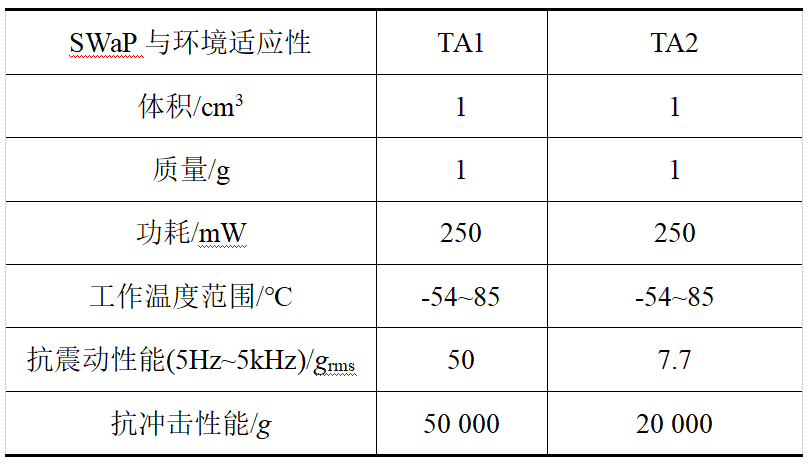
表3 DARPA高級(jí)慣性微傳感器AIMS研制指標(biāo)(b)
如圖8~10所示,AIMS項(xiàng)目重點(diǎn)支持的三個(gè)陀螺研制方向?yàn)椋?)速率積分陀螺;2)光檢測(cè)MEMS陀螺;3)片上光波導(dǎo)陀螺。同時(shí),DARPA強(qiáng)調(diào)只支持結(jié)構(gòu)上高度對(duì)稱的二維或三維的MEMS陀螺研制,不支持音叉型MEMS陀螺。
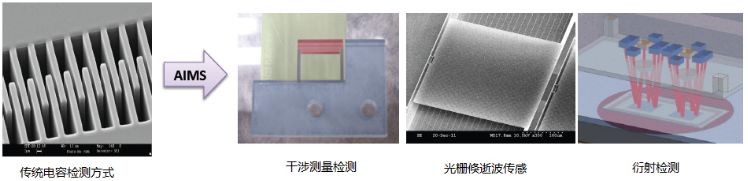
圖8 AIMS計(jì)劃發(fā)展的光學(xué)MEMS陀螺
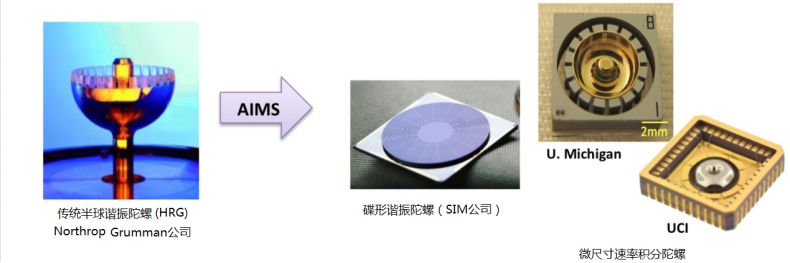
圖9 AIMS計(jì)劃發(fā)展的速率積分陀螺
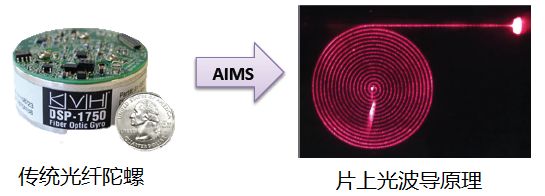
圖10 AIMS計(jì)劃發(fā)展的片上光波導(dǎo)陀螺
2未來(lái)高端MEMS陀螺關(guān)鍵技術(shù)
MEMS陀螺將不斷突破、引入許多關(guān)鍵技術(shù),逐步提高精度,在未來(lái)的高端應(yīng)用領(lǐng)域能得到越來(lái)越廣泛的應(yīng)用。
靜電平衡調(diào)整技術(shù)
MEMS工藝誤差總是不可避免的,高精度MEMS陀螺對(duì)工藝誤差非常敏感。工藝誤差會(huì)使器件剛度與阻尼不對(duì)稱,驅(qū)動(dòng)模態(tài)與敏感模態(tài)存在頻差,陀螺靈敏度降低,精度大打折扣。工藝誤差存在隨機(jī)性,因此要得到高精度MEMS陀螺往往是“百里挑一”。對(duì)工藝誤差進(jìn)行校正、調(diào)整,使高精度MEMS陀螺做到由“百里挑一”變?yōu)椤鞍賯€(gè)如一”,是目前保障高精度陀螺成品率的重要技術(shù)途徑。靜電平衡調(diào)整技術(shù)是高效率、低成本的工藝誤差調(diào)整技術(shù)手段。靜電平衡調(diào)整可通過(guò)靜電負(fù)剛度效應(yīng),調(diào)整剛度對(duì)稱性,使驅(qū)動(dòng)模態(tài)和敏感模態(tài)頻率趨于一致,以提高精度。靜電平衡調(diào)整技術(shù)涉及靜電平衡基礎(chǔ)理論、靜電平衡電極排布、調(diào)整電壓判據(jù)及測(cè)試、靜電電壓施加方法、靜電調(diào)節(jié)自動(dòng)化等,是未來(lái)高端MEMS陀螺的重要關(guān)鍵技術(shù)。
速率積分控制技術(shù)
速率積分陀螺,也稱全角模式陀螺。速率積分陀螺相對(duì)于速率陀螺具有很多優(yōu)勢(shì):速率積分陀螺動(dòng)態(tài)范圍更大、沒(méi)有帶寬限制、噪聲誤差不隨時(shí)間累積等。因此速率積分陀螺是未來(lái)高精度陀螺的重要發(fā)展方向之一。速率積分控制技術(shù)是實(shí)現(xiàn)速率積分陀螺的關(guān)鍵技術(shù)。
原子級(jí)時(shí)鐘鎖頻技術(shù)
原子級(jí)鎖頻MEMS陀螺,是基于原子級(jí)鎖頻技術(shù)以提高精度的MEMS陀螺。應(yīng)用于MEMS陀螺的原子級(jí)鎖頻技術(shù),旨在使MEMS陀螺諧振頻率與一個(gè)極精準(zhǔn)的頻率基準(zhǔn)(原子鐘級(jí)別的精度)同步,利用“原子鐘級(jí)別”的頻率精確性,將MEMS陀螺諧振頻率鎖定在恒定值,不受環(huán)境影響而變化。原子級(jí)鎖頻技術(shù)可使MEMS諧振陀螺的角度隨機(jī)游走與零偏穩(wěn)定性提高幾個(gè)數(shù)量級(jí),從而使陀螺精度具有跨越式提升。原子級(jí)鎖頻技術(shù)是大幅提高M(jìn)EMS陀螺精度極具潛力的技術(shù)。
系統(tǒng)自校準(zhǔn)技術(shù)
自校準(zhǔn)技術(shù)是指?jìng)鞲衅魃想姾髮?duì)零位輸出進(jìn)行自動(dòng)校準(zhǔn)、歸零的技術(shù)。通過(guò)自校準(zhǔn)技術(shù),抵消陀螺零偏輸出,消除陀螺多次上電零偏不一致的問(wèn)題,對(duì)提高零偏重復(fù)性,尤其是提高長(zhǎng)時(shí)間角度檢測(cè)的精度有重要的作用。自校準(zhǔn)技術(shù)是保障MEMS慣性傳感器精度的又一技術(shù)瓶頸。
光檢測(cè)技術(shù)
光學(xué)檢測(cè)方法具有結(jié)構(gòu)簡(jiǎn)單、精度高、穩(wěn)定性好、抗電磁干擾等優(yōu)點(diǎn),將光學(xué)檢測(cè)與MEMS傳感器相結(jié)合,使測(cè)量精度更高、測(cè)量更加智能化,具有廣闊的市場(chǎng)前景。
高Q值技術(shù)
高Q值是提高陀螺靈敏度的重要途徑,是未來(lái)高精度MEMS陀螺的關(guān)鍵技術(shù)之一。
04
總結(jié)與啟示
綜上所述,HRG是一種典型的固體波動(dòng)陀螺,具有很高的精度,并已得到廣泛應(yīng)用。但HRG加工難度大,批生產(chǎn)能力差,因此逐步衍生除了適合平面加工工藝的MEMS諧振環(huán)陀螺和諧振盤陀螺。具有全對(duì)稱特性的MEMS平面陀螺具有良好的環(huán)境適應(yīng)性,美國(guó)和歐洲多家軍工企業(yè)MEMS陀螺均采用全對(duì)稱特性的MEMS平面陀螺設(shè)計(jì)與加工技術(shù),并在導(dǎo)彈、炮彈、衛(wèi)星及空間飛行器上得到廣泛應(yīng)用,是未來(lái)高端MEMS陀螺研制的方向。
-
MEMS陀螺
+關(guān)注
關(guān)注
0文章
5瀏覽量
2318
原文標(biāo)題:高端MEMS固體波動(dòng)陀螺的發(fā)展與應(yīng)用
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
LED燈條未來(lái)的發(fā)展方向
低碳智能成為未來(lái)儀器儀表發(fā)展方向
MEMS傳感器發(fā)展前景如何?請(qǐng)大家談發(fā)展。
嵌入式領(lǐng)域的職業(yè)發(fā)展方向怎么樣?
頻譜感知技術(shù)研究發(fā)展到了哪一步?未來(lái)的發(fā)展方向是什么?
單片機(jī)的原理是什么?未來(lái)如何發(fā)展?
嵌入式系統(tǒng)開源軟件的現(xiàn)狀及未來(lái)的發(fā)展方向
深度分析MEMS固體波動(dòng)陀螺諧振子現(xiàn)狀及發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論