 共融機器人的三個要點:共存、協作與認知
共融機器人的三個要點:共存、協作與認知
摘 要
《國家科學評論》(National Science Review,NSR)最近發表了由華中科技大學丁漢院士,國防科技大學楊學軍院士、西安交通大學鄭南寧院士,國家自然科學基金委黎明研究員和賴一楠教授,以及華中科技大學吳豪研究員共同撰寫的觀點文章“Tri-Co Robot: A Chinese Robotic Research Initiative for Enhanced Robot Interaction Capabilities” (https://doi.org/10.1093/nsr/nwx148)。文章介紹了“共融機器人基礎理論與關鍵技術研究”重大研究計劃。該計劃旨在引導中國機器人領域學者深化相關領域的基礎研究,同時推動中國機器人產業的發展。
自1959年工業機器人誕生以來,機器人在機械制造、國防安全、健康服務、科考與醫療等方面發揮出越來越重要的作用。如今,機器人的應用已經從基本的機械加工和簡單協助演變成了通過交互作用完成不同環境下的復雜任務。例如,在與環境交互方面,雙足機器人實現了在崎嶇地形上的高速協調運動;在與人交互方面,智能假肢能夠通過神經接口采集生物信號,模仿人的肢體動作,并向使用人員提供反饋;在機器人與機器人之間的交互方面,群體智能機器人可以通過集群控制算法和分散信息交換實現群體合作。由此可見,機器人實現高級功能很大程度上依賴于它們與環境、人和其他機器人的交互能力。
為了推動機器人與作業環境、人及其它機器人之間的交互能力,在丁漢院士、楊學軍院士、鄭南寧院士等專家的建議下,國家自然科學基金委員會于2016年啟動了“共融機器人基礎理論與關鍵技術研究”重大研究計劃。共融機器人(Coexisting-Cooperative-Cognitive Robot, Tri-Co Robot)有三個要點,即共存(Coexisting)、協作(Cooperative)與認知(Cognitive),分別保證了機器人應用的普遍性、機器人交互的協調性和機器人對復雜環境的適應性,從而增強與作業環境、人及其它機器人之間的交互能力。
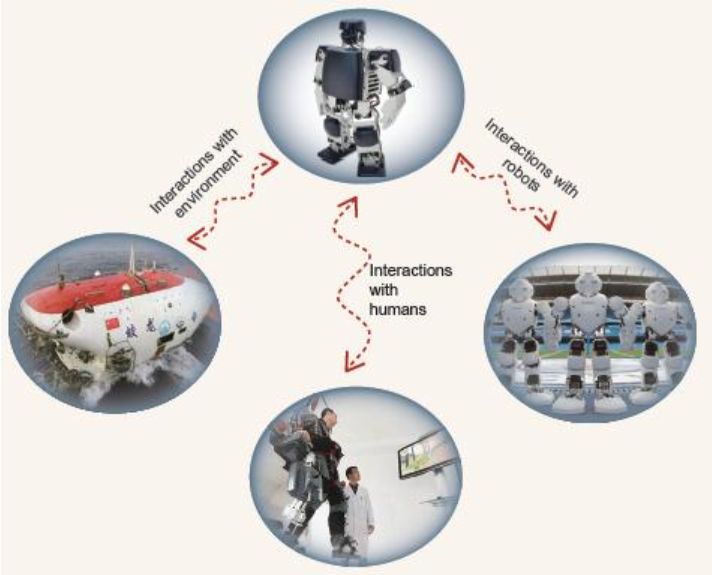
增強與作業環境、人及其它機器人之間交互能力的共融機器人
共融機器人研究關注三個主要科學問題。首先是剛-柔-軟體機器人的運動特性與可控性。未來的共融機器人將是由剛性材料與柔性材料再加上運動機構組成的耦合系統,研究其動力學模型和控制方法是增強機器人交互能力的前提。其次是人-機-環境多模態感知與自然交互。研究視-聽-觸等多模態信息獲取方法以及人體生理電信號頻譜特征,從而準確理解人體行為意圖,進一步實現人-機互動協作。最后是機器人群體智能與操作系統架構。探索自主個體互動及感知決策信息的傳播機理,建立群體認知和互動協作的模型及方法,實現集群協作控制。同時,“共融機器人基礎理論與關鍵技術研究”重大研究計劃旨在發展機器人在智能制造、康復醫療和國防安全等方面的應用,開發出 “能工巧匠型”智能制造機器人、智能康復機器人和特種集群機器人等具有高級功能形態的機器人系統。
由華中科技大學丁漢院士,國防科技大學楊學軍院士、西安交通大學鄭南寧院士,國家自然科學基金委黎明研究員和賴一楠教授,以及華中科技大學吳豪研究員共同撰寫的觀點文章“Tri-Co Robot: A Chinese Robotic Research Initiative for Enhanced Robot Interaction Capabilities”最近發表于《國家科學評論》(National Science Review,2017,https://doi.org/10.1093/nsr/nwx148),介紹了“共融機器人基礎理論與關鍵技術研究”重大研究計劃。該計劃旨在引導中國機器人領域學者深化相關領域的基礎研究,同時推動中國機器人產業的發展。
-
機器人
+關注
關注
211文章
28524瀏覽量
207544
原文標題:NSR觀點 | 共融機器人的基礎理論與關鍵技術
文章出處:【微信號:zhishexueshuquan,微信公眾號:知社學術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
MiR推出MC600移動協作機器人
協作機器人TM25S:高效人機協作改變傳統作業方式






 工商網監
工商網監
評論