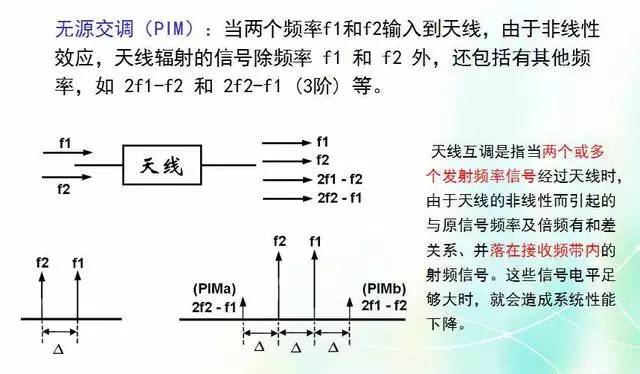
") 天線知識(shí)深度圖片詳解
天線知識(shí)深度圖片詳解




聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
天線
+關(guān)注
關(guān)注
68文章
3211瀏覽量
141022
原文標(biāo)題:〖干貨〗天線知識(shí)詳解
文章出處:【微信號(hào):edn-china,微信公眾號(hào):EDN電子技術(shù)設(shè)計(jì)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何結(jié)合深度學(xué)習(xí)和深度圖在三個(gè)項(xiàng)目中取得有效的成果
傳統(tǒng)獲取深度圖的方法是利用雙目立體視覺(jué)獲取視差信息從而得到環(huán)境的深度的。而今天大多使用的深度傳感器則是基于結(jié)構(gòu)光傳感器的原理,通過(guò)將已知模式的紅外光投影到環(huán)境并解算來(lái)實(shí)現(xiàn)深度的獲取。另
如何從深度圖像中找到3或5個(gè)中心像素
嗨,大家好,我試圖從深度圖像中找到幾個(gè)中心像素。我正在嘗試實(shí)現(xiàn)分割,我需要找到分割對(duì)象的距離。這就是我的想法,這將是有效的。當(dāng)彩色圖像用于分割時(shí),全幀深度圖像將用于找到距離。在我的下面的代碼中。我
發(fā)表于 11-19 14:19
如何從D435獲取16位深度圖像?
我從realsense查看器中獲取d435深度相機(jī)的數(shù)據(jù),當(dāng)我保存深度圖像的快照時(shí),我在規(guī)格中得到8位(1-256)灰度圖像,據(jù)說(shuō)相機(jī)給出了16位深度圖片。你知道我怎么能得到16位圖像?以上
發(fā)表于 11-27 14:11
D435深度圖的焦點(diǎn)在哪里?
我從英特爾 - RealSense-D400系列 - 數(shù)據(jù)表.pdf第94頁(yè)的圖紙中推測(cè),深度傳感器的中心距攝像機(jī)右側(cè)(USB側(cè))37.5毫米:根據(jù)經(jīng)驗(yàn),我推斷深度圖焦點(diǎn)X在相機(jī)的臉后面約32mm
發(fā)表于 12-05 10:52
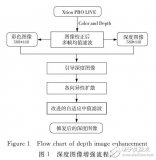
各向異性擴(kuò)散深度圖像增強(qiáng)算法
深度圖像受其測(cè)距原理所限,存在邊緣不匹配、無(wú)效像素、噪聲等問(wèn)題,提出一種基于改進(jìn)的各向異性擴(kuò)散算法的深度圖像增強(qiáng)方法。首先,校正深度圖像和彩色圖像的位置關(guān)系,并根據(jù)時(shí)間連續(xù)性選擇多幀圖像,進(jìn)行多幀
發(fā)表于 11-25 11:08
?9次下載
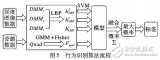
基于深度圖形與骨骼數(shù)據(jù)的多特征行為識(shí)別方法
處理。隨著圖像技術(shù)與硬件的發(fā)展,利用微軟Kinect或華碩Xtion等設(shè)備,學(xué)者可以實(shí)時(shí)獲取人體的深度圖像信息。與傳統(tǒng)的圖像相比,深度圖像不受光照影響,能夠提供三維空間信息。利用深度圖像,學(xué)者們對(duì)行為識(shí)別做了許多研究,本文
發(fā)表于 12-09 11:47
?0次下載

小波域分布式深度圖視頻編碼
針對(duì)分布式多視點(diǎn)加深度格式( DMVD)的視頻編碼中深度圖視頻解碼質(zhì)量問(wèn)題,提出一種結(jié)合予帶層及子帶系數(shù)的小波域分布式深度視頻非均勻量化方案,通過(guò)給邊緣分配更多比特來(lái)提升深度圖的邊緣質(zhì)
發(fā)表于 12-20 16:34
?1次下載
基于Kinect深度圖預(yù)處理
針對(duì)應(yīng)用在機(jī)器人三維(3D)場(chǎng)景感知測(cè)量中,Kinect深度圖的聯(lián)合雙邊濾波(JBF)存在降低原始場(chǎng)景深度信息精確度的制約性問(wèn)題,提出一種新的預(yù)處理算法。首先,通過(guò)構(gòu)建深度圖的測(cè)量和采樣模型,得到
發(fā)表于 12-25 16:58
?0次下載
深度圖像的獲取方法主要有哪些
? 今天介紹一下深度圖像的獲取方法主要有哪些,以及這些方法會(huì)導(dǎo)致深度圖像中存在什么樣的問(wèn)題。 在計(jì)算機(jī)視覺(jué)系統(tǒng)中,三維場(chǎng)景信息為圖像分割、目標(biāo)檢測(cè)、物體跟蹤等各類計(jì)算機(jī)視覺(jué)應(yīng)用提供了更多的可能性,而






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論