 AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃
AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃
AGV是實現柔性制造、裝配及自動化物流的關鍵設備之一,近幾年來,隨著各國智能制造政策的不斷實施,促進了AGV產業的快速發展。
目前,AGV系統廣泛應用于各個行業之中,比如物流行業、新能源行業、汽車行業、制藥行業等等。隨著幾十年的發展,AGV系統在結構、調度、導航方式等方面的發展更加趨近各行各業的需求,在穩定性、靈活性、安全性、智能化方面的優勢越加凸顯。
路徑規劃技術是AGV根據當前位置和目標點位置,在多個選擇路徑中選擇最優路徑的過程。目前,常用的路徑規劃算法有A*算法、Dijkstra算法和遺傳算法等。
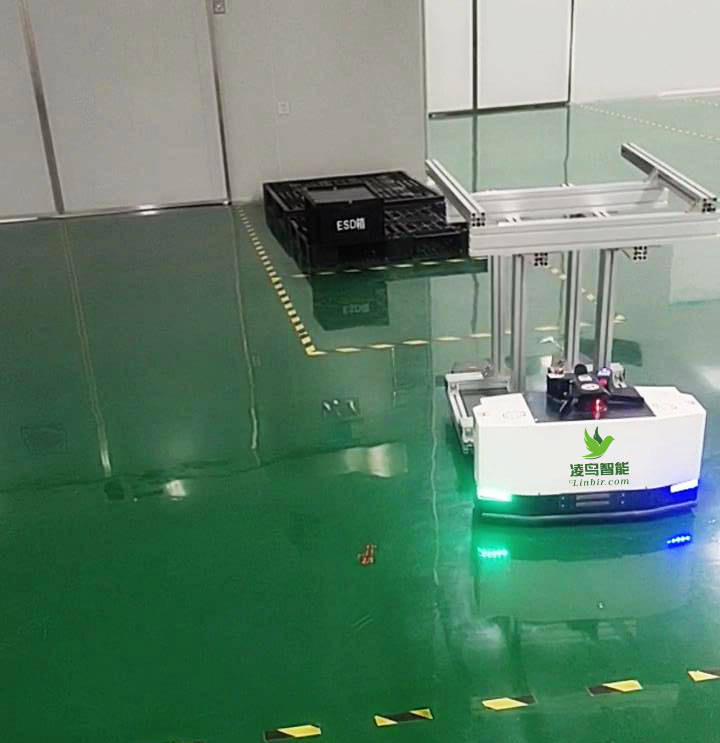
 AGV地牛小車
AGV地牛小車
A*算法是常用的啟發式搜索算法,通過評估每個候選節點的代價函數,預測目標節點的最優路徑。這種算法技術考慮了路徑的距離和啟發式估計,具有較高的搜索效率,準確性也較高。
Dijkstra算法是一種基于圖的最短路徑搜索算法,通過不斷更新起點到各個節點的最短路徑長度,逐漸擴大搜索范圍,找到目標點的最短路徑。Dijkstra算法適用于無向圖和有向圖,但在復雜的場景中時間復雜度較高。
遺傳算法模擬生物的進化過程,通過選擇、交叉和變異等操作,優化路徑規劃的解決方案。遺傳算法適應性強、全局搜索能力強,能夠適應復雜的物流場景和多目標路徑規劃問題,但計算復雜度較高,適合于規模較小的問題。
 AGV軟件系統
AGV軟件系統
為了提高AGV導航和路徑規劃技術的性能,以下是一些優化方向:
多傳感器融合
通過將多個傳感器的數據進行融合,提高定位和跟蹤的準確性,降低誤差。
高精度地圖構建
構建高精度的地圖,包括環境地圖和路網地圖,能夠為路徑規劃提供準確的參考,提高路徑規劃的效果。
實時路徑更新
在動態環境中,實時更新路徑規劃結果,考慮障礙物的變化,能夠使AGV更加靈活和適應不同場景。
深度學習技術
利用深度學習算法,通過對傳感器數據進行分析和處理,實現更智能和更精準的導航和路徑規劃,提高系統自適應性。
 AGV小車
AGV小車
傳統的叉車和拖車作業,需求有人駕馭。而叉車或拖車司機在工作期間需要吃飯喝水、休息,還可能發生怠工等影響作業功率的事件,叉車和拖車工作到一定時間還需求開到充電間進行充電,導致實際工作負荷不足70%;
而AGV搬運機器人作為自動化物料搬運設備,可在線充電,24h滿負荷作業,具有人工作業無法比擬的優勢。AGV搬運機器人可以做到高效率運行,合理安排,站點排隊。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28512瀏覽量
207511 -
AGV
+關注
關注
27文章
1317瀏覽量
41148 -
AGV小車
+關注
關注
4文章
172瀏覽量
11159
發布評論請先 登錄
相關推薦
智能工廠AGV引入需要注意的一些地方
AGV小車的工作原理是什么?
10W預算,不買傳統搬運設備買AGV小車,值嗎?
agv搬運機器人是怎么實現無人搬運的?

精準對接 高壽命-AGV充電連接器解析

基于量子計算技術的AGV調度問題研究
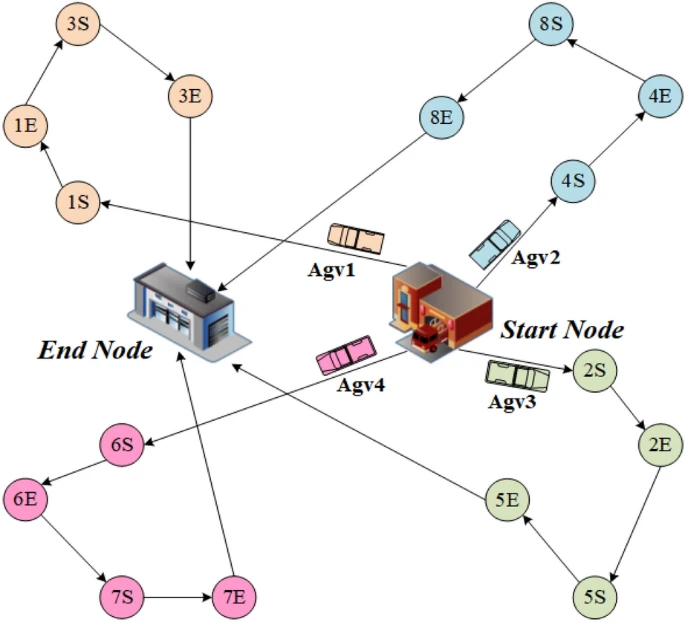
多臺倉儲AGV協作全局路徑規劃算法的研究

平衡流量計計算公式

Agv小車能對接哪些自動化設備?最后一個你絕對想不到
光纖跳線的數量怎么計算
BL340系列ARMxy嵌入式計算機如何為AGV提供強大的控制能力?

【Vision Board創客營連載體驗】基于RA8D1-Vision Board的自動路徑規劃小車
賦能產業互聯網,高通量計算讓世界更高效!

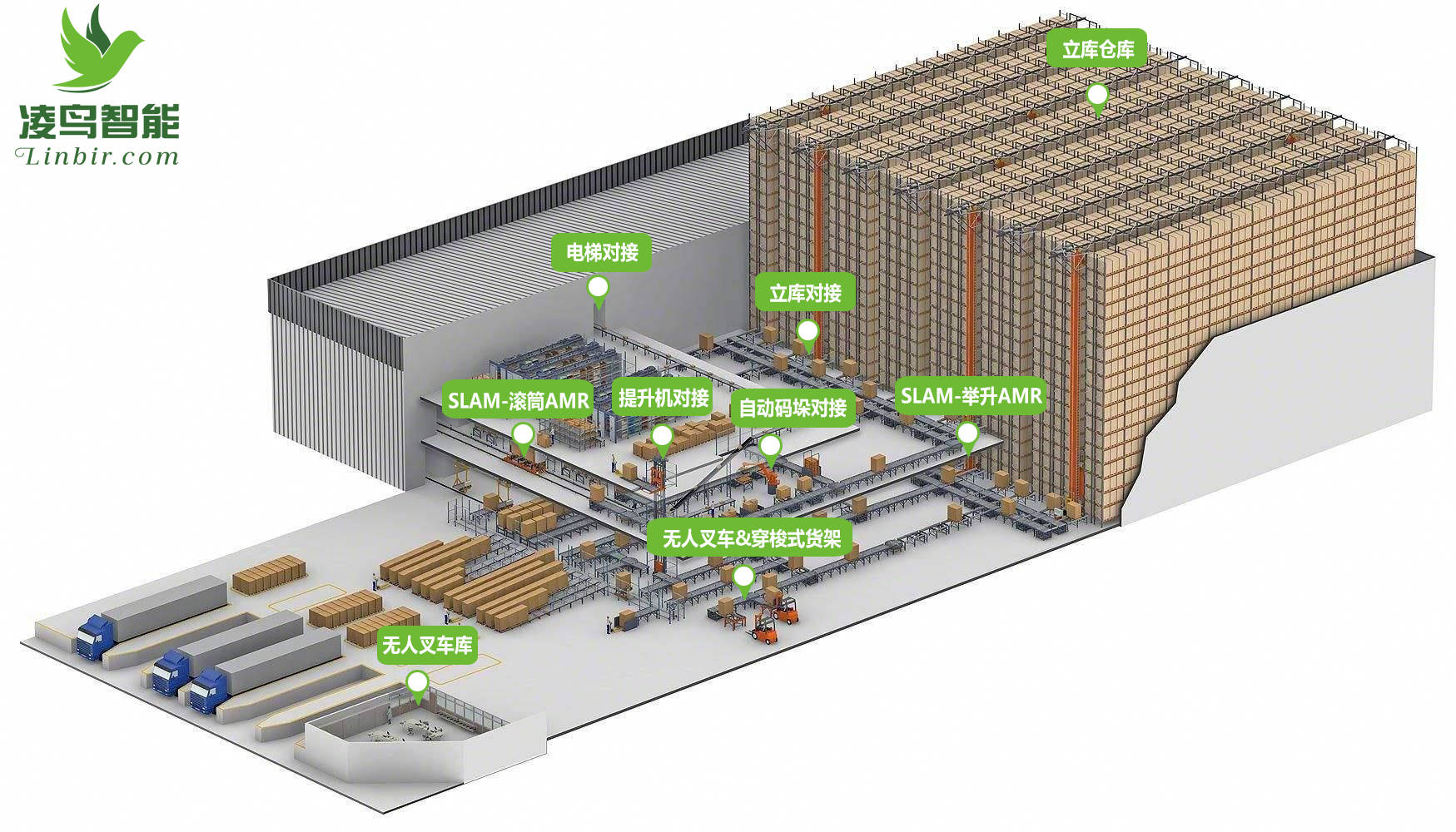
AGV與上游系統(MES/ERP/WMS)對接方法解析






 工商網監
工商網監
評論