") 基于VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的UVW視覺(jué)對(duì)位解決方案
基于VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的UVW視覺(jué)對(duì)位解決方案
一、市場(chǎng)應(yīng)用背景
隨著平板顯示器(包括TFT/LCD、PDP和OLED)等產(chǎn)品的尺寸增大,以及同時(shí)需要兼容小型化高精度產(chǎn)品的需求加劇,各大廠商對(duì)視覺(jué)對(duì)位工藝流程的負(fù)載能力、移動(dòng)平臺(tái)范圍、效率和精度提出了更高的要求。因此,UVW對(duì)位平臺(tái)成為滿足這些需求用戶的理想選擇。
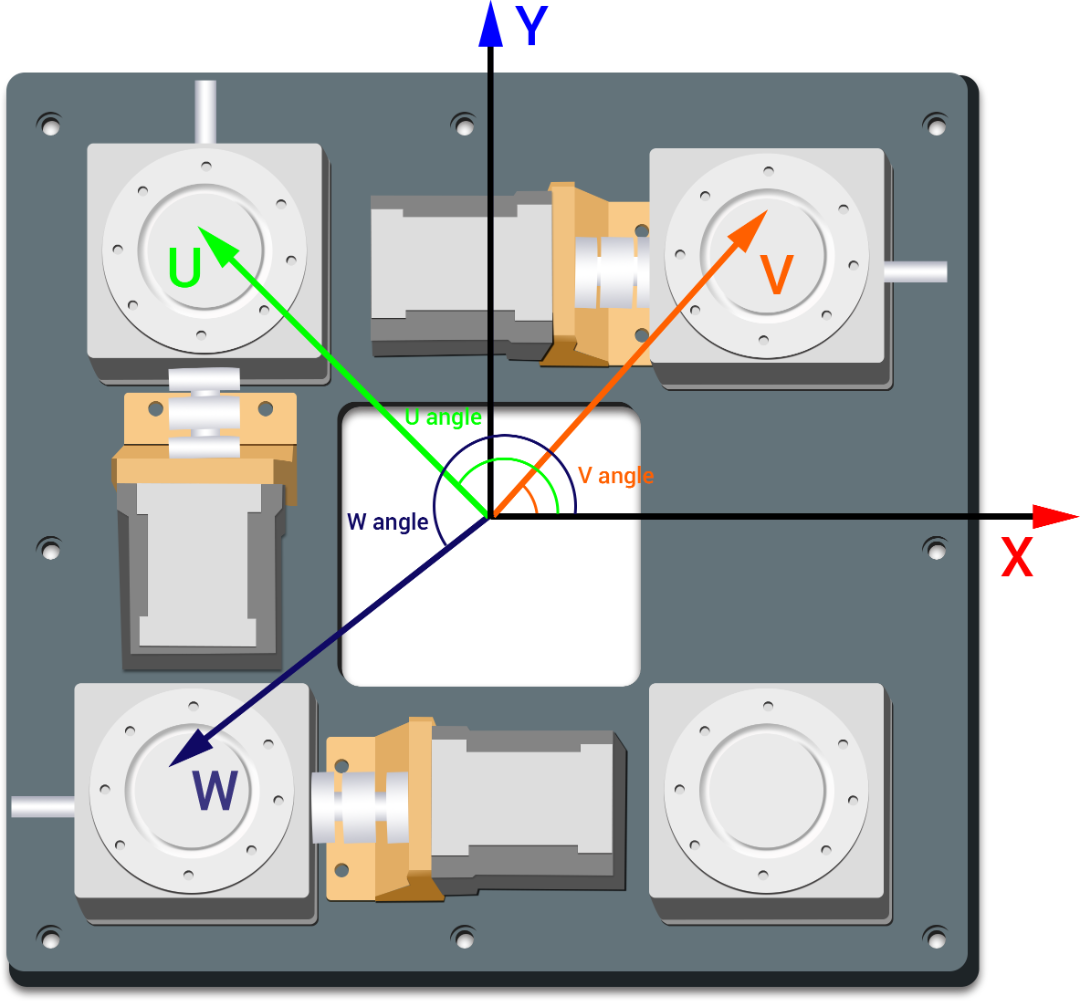
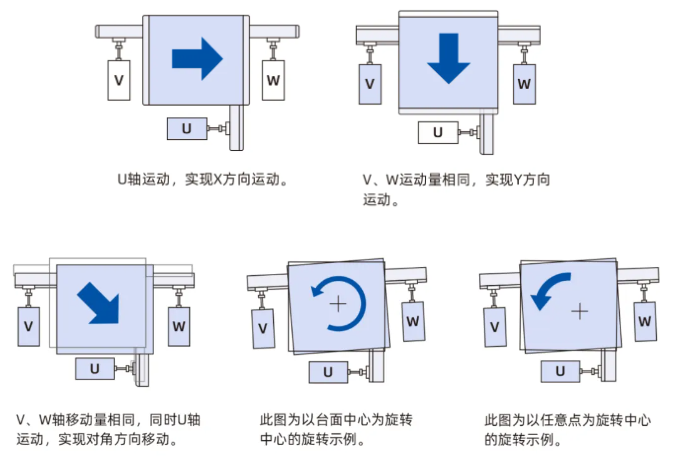
UVW對(duì)位平臺(tái),也稱XXY對(duì)位平臺(tái),屬于三軸并聯(lián)運(yùn)動(dòng)機(jī)構(gòu),通過(guò)三個(gè)線性運(yùn)動(dòng)軸的協(xié)同控制,能夠?qū)崿F(xiàn)以平面上任意一點(diǎn)的中心旋轉(zhuǎn)和任意方向平移。配合CCD視覺(jué)系統(tǒng),平臺(tái)在X-Y平面和θ角度進(jìn)行精密微調(diào),從而達(dá)到高精度視覺(jué)對(duì)位功能,精度可達(dá)±0.001mm。
UVW視覺(jué)對(duì)位平臺(tái)廣泛應(yīng)用于需要高速高精位置對(duì)齊的智能裝備,包括曝光機(jī)、邦定機(jī)、絲網(wǎng)印刷機(jī)、晶圓對(duì)位、PCB鉆孔機(jī)、貼合機(jī)(LCD/FPC)、視覺(jué)模切機(jī)、鋰電池疊片等。
傳統(tǒng)XYθ平臺(tái)方案存在的局限性:
XYθ平臺(tái)的結(jié)構(gòu)相對(duì)簡(jiǎn)單,主要由兩個(gè)X、Y直線軸和一個(gè)旋轉(zhuǎn)軸組成,主要進(jìn)行XY平面內(nèi)的位移和中心旋轉(zhuǎn)運(yùn)動(dòng),無(wú)法根據(jù)任意一點(diǎn)坐標(biāo)進(jìn)行中心旋轉(zhuǎn),影響其在高精度視覺(jué)對(duì)位場(chǎng)合中應(yīng)用,靈活性不高。
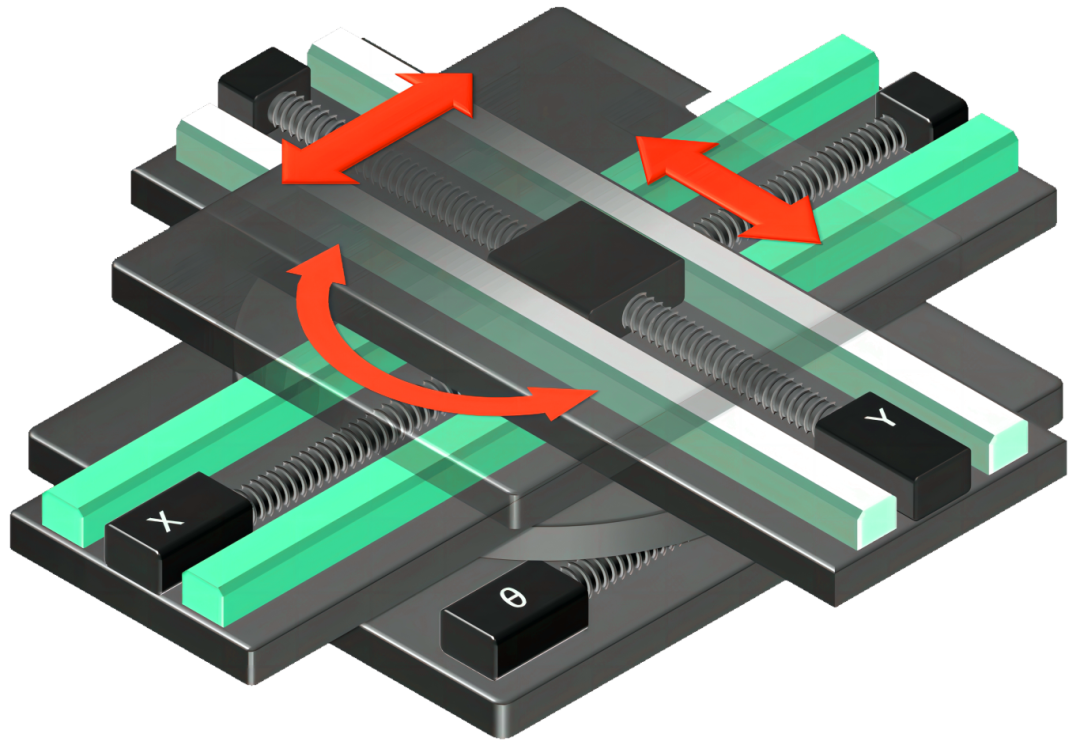
XYθ平臺(tái)的垂直堆疊結(jié)構(gòu)使得工作臺(tái)較為笨重,不便于快速移動(dòng)或調(diào)整,不方便與其他運(yùn)動(dòng)軸進(jìn)行融合,降低了自動(dòng)化設(shè)備開(kāi)發(fā)的效率。XYθ平臺(tái)與UVW平臺(tái)相比,其在剛性、負(fù)載能力及重復(fù)定位精度方面也有所不足,限制了其在高速高精的視覺(jué)對(duì)位場(chǎng)合中的應(yīng)用。
正運(yùn)動(dòng)技術(shù)解決方案:
正運(yùn)動(dòng)技術(shù)針對(duì)現(xiàn)有市場(chǎng)需求,開(kāi)發(fā)了一種基于VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的UVW視覺(jué)對(duì)位解決方案,用戶通過(guò)選擇對(duì)應(yīng)模型的軸列表,使用對(duì)應(yīng)指令建立機(jī)械手正逆解,轉(zhuǎn)換為各聯(lián)動(dòng)軸的移動(dòng)距離。配合高精度CCD視覺(jué)系統(tǒng),即可快速實(shí)現(xiàn)高速高精的雙目或四目UVW視覺(jué)對(duì)位應(yīng)用。
正運(yùn)動(dòng)技術(shù)的UVW平臺(tái)運(yùn)動(dòng)控制算法兼容三種常見(jiàn)模型:FRAME33、FRAME34、FRAME37分別對(duì)應(yīng)兩種機(jī)械結(jié)構(gòu)(PRP、PPR)跟兩個(gè)坐標(biāo)系方向(XYY、XXY),可以實(shí)現(xiàn)單軸直線運(yùn)動(dòng)、兩軸線性插補(bǔ)、兩軸圓弧插補(bǔ)、空間圓弧等復(fù)雜運(yùn)動(dòng)。
VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)集成視覺(jué)和運(yùn)控于一體,替代傳統(tǒng)的PC工控機(jī)+視覺(jué)軟件+運(yùn)動(dòng)控制方案,硬件接線更方便,成本更低。搭載正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核MotionRT7,核內(nèi)交互,指令調(diào)用速度快至us級(jí),提升加工和檢測(cè)效率。

二、VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在UVW視覺(jué)對(duì)位的應(yīng)用
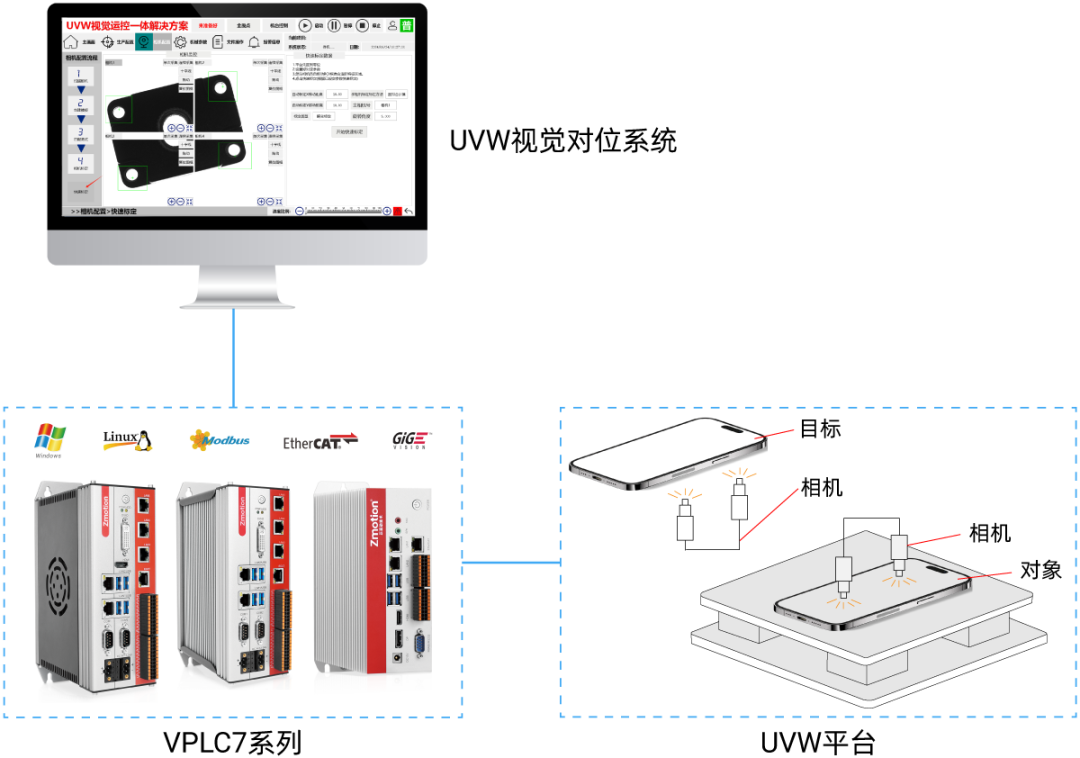 UVW視覺(jué)四目對(duì)位應(yīng)用示意圖
UVW視覺(jué)四目對(duì)位應(yīng)用示意圖
傳統(tǒng)的UVW視覺(jué)對(duì)位方案
工控機(jī)+視覺(jué)軟件+運(yùn)動(dòng)控制卡的組合方案,配件多,接線復(fù)雜,視覺(jué)與運(yùn)動(dòng)控制需要相互數(shù)據(jù)交互,故障排查麻煩,并且多套硬件成本和維護(hù)較高。
正運(yùn)動(dòng)技術(shù)UVW視覺(jué)對(duì)位方案設(shè)計(jì)
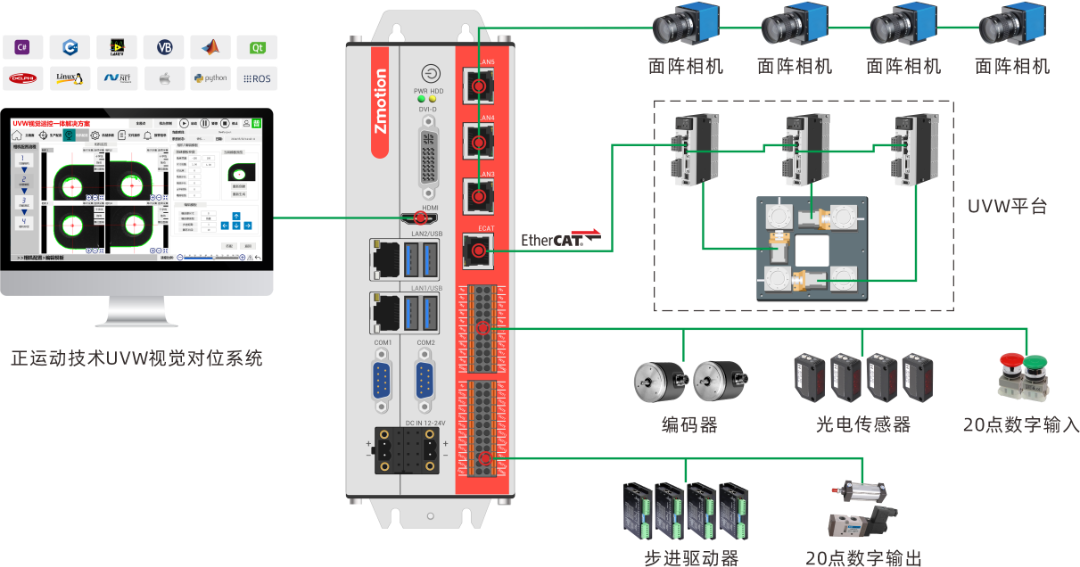
EtherNET接口:千兆網(wǎng)口,通過(guò)交換機(jī)最多可接8個(gè)相機(jī);
EtherCAT接口:接EtherCAT總線驅(qū)動(dòng)器,控制UVW驅(qū)動(dòng)電機(jī);
20DI:接原點(diǎn)、限位等傳感器,以及開(kāi)關(guān)信號(hào)等;
20DO:接輸出開(kāi)關(guān)信號(hào),也可接單端脈沖輸出(500KHz);
HDMI接口:接顯示屏;
USB接口:接鼠標(biāo)鍵盤等。
運(yùn)動(dòng)控制與機(jī)器視覺(jué)實(shí)現(xiàn)過(guò)程
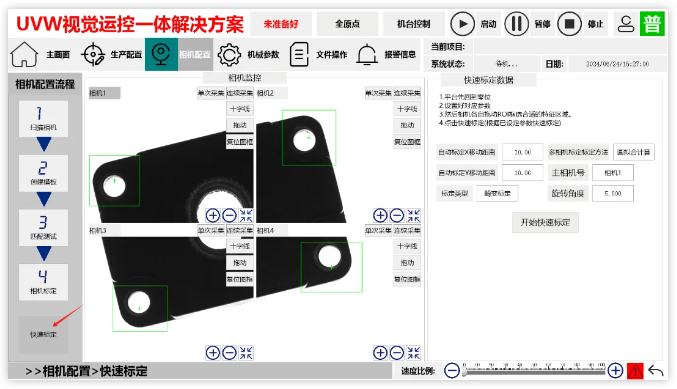
(1)機(jī)器視覺(jué)
根據(jù)具體應(yīng)用需求,使用2個(gè)或4個(gè)面陣相機(jī)進(jìn)行拍攝對(duì)位標(biāo)記點(diǎn)。通過(guò)配置相機(jī)參數(shù)和選擇Mark點(diǎn)創(chuàng)建目標(biāo)區(qū)域即可一步完成標(biāo)定,獲取標(biāo)定系數(shù),簡(jiǎn)化視覺(jué)操作步驟,降低了現(xiàn)場(chǎng)應(yīng)用的難度。
系統(tǒng)自動(dòng)計(jì)算出目標(biāo)位置與實(shí)際位置之間的偏差(包括U、V、W軸的位置偏移及θ軸的角度偏移),實(shí)現(xiàn)UVW視覺(jué)對(duì)位功能。
(2)運(yùn)動(dòng)控制
選擇對(duì)應(yīng)模型的軸列表,設(shè)置關(guān)節(jié)軸參數(shù)及虛擬軸參數(shù),確定機(jī)械手零點(diǎn)位置(RAME33需要保證VW軸是水平的。平臺(tái)上任意一點(diǎn)可作為零點(diǎn),保證結(jié)構(gòu)參數(shù)正確即可),之后使用對(duì)應(yīng)指令建立機(jī)械手正逆解,計(jì)算出UVW平臺(tái)的三軸原始位置與2個(gè)或4個(gè)面陣相機(jī)獲得的相對(duì)坐標(biāo)之間的關(guān)系。
在確定 ΔU、ΔV和ΔW后,最后UVW平臺(tái)便能沿三個(gè)軸線性地執(zhí)行旋轉(zhuǎn)和平移動(dòng)作,以補(bǔ)償位置和角度的偏差,實(shí)現(xiàn)高速高精的視覺(jué)對(duì)位應(yīng)用。
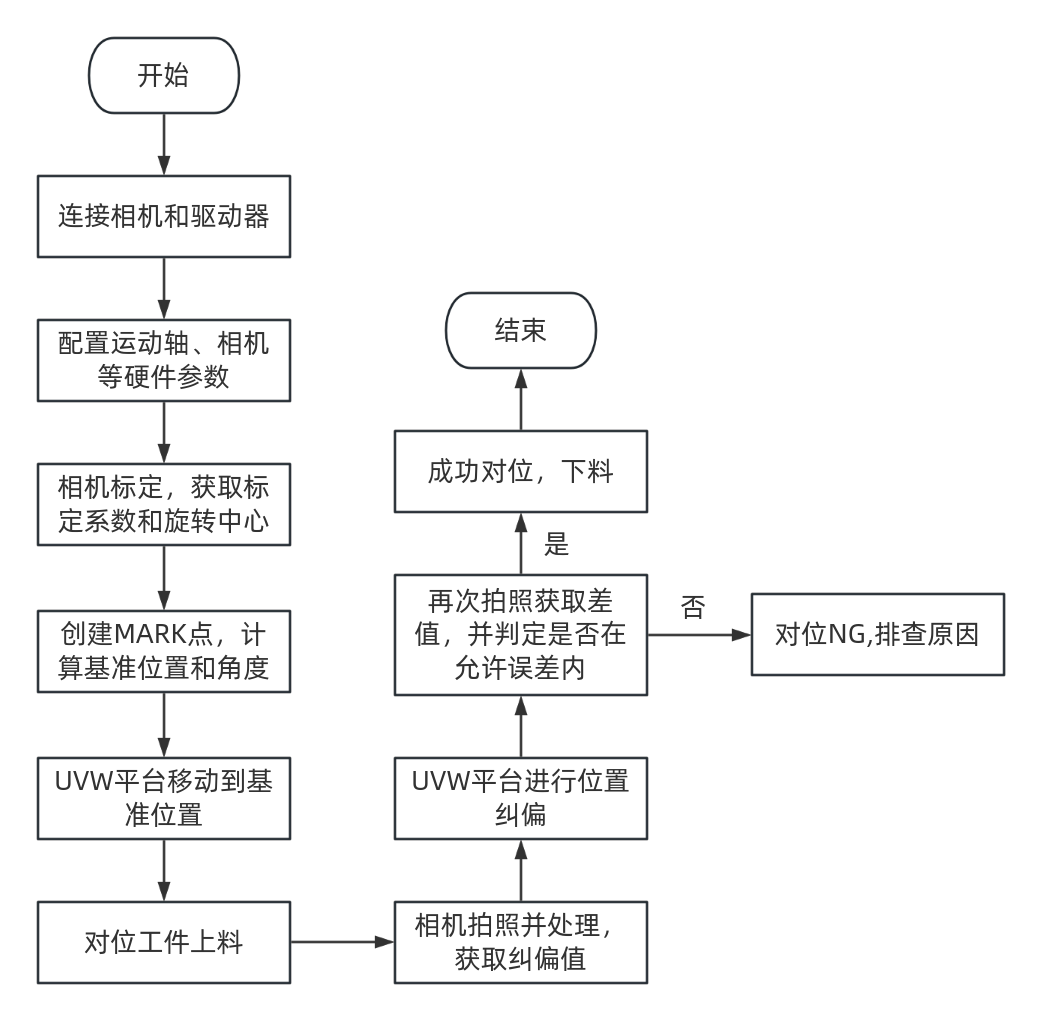
UVW視覺(jué)對(duì)位工藝流程
方案核心優(yōu)勢(shì)
集成機(jī)器視覺(jué)、UVW控制和運(yùn)動(dòng)控制于一體,硬件接線更方便,成本更低;
運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核,核內(nèi)交互,指令調(diào)用速度快至us級(jí),提升加工效率;
內(nèi)置UVW平臺(tái)算法,客戶使用更方便,提升工程師開(kāi)發(fā)效率;
通過(guò)自動(dòng)校準(zhǔn)確定相機(jī)和工作臺(tái)之間的位置關(guān)系,提高節(jié)拍;
內(nèi)置視覺(jué)算法,精度高,雙相機(jī)定位精度在2個(gè)像素以內(nèi);
統(tǒng)一的API函數(shù)接口,適用各種PC上位機(jī)語(yǔ)言開(kāi)發(fā),易于客戶集成到配備現(xiàn)有系統(tǒng)中,創(chuàng)建高速、高精的視覺(jué)對(duì)位系統(tǒng)。

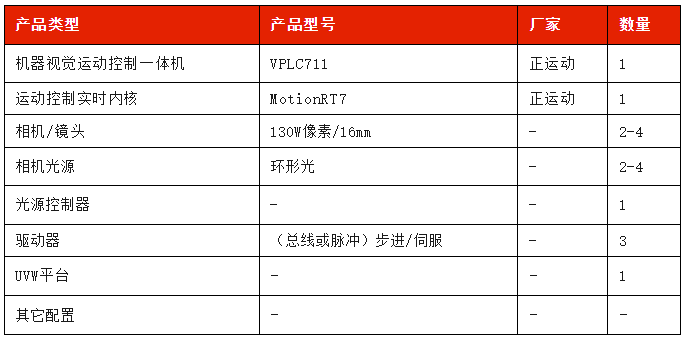
解決方案硬件配置
三、VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
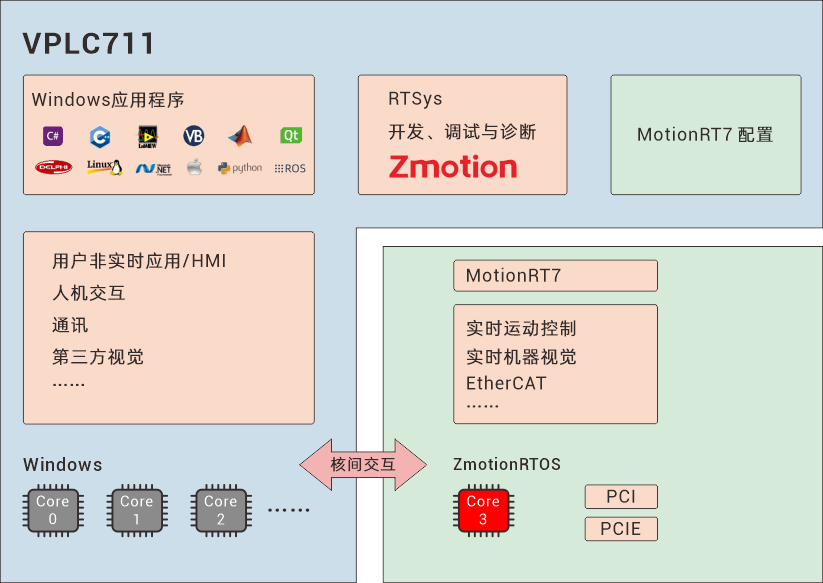
正運(yùn)動(dòng)技術(shù)VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)是一款基于x86平臺(tái)和Windows操作系統(tǒng)的高性能機(jī)器視覺(jué)EtherCAT運(yùn)動(dòng)控制器,可脫機(jī)運(yùn)行,支持豐富的IO控制,30+機(jī)器人算法,以及視覺(jué)和運(yùn)動(dòng)控制功能,大幅簡(jiǎn)化視覺(jué)與運(yùn)動(dòng)控制項(xiàng)目的配置流程。
VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的安裝與拆卸過(guò)程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動(dòng)器、傳感器、編碼器、控制閥等)和MES系統(tǒng)無(wú)縫集成,提供一個(gè)完整端到端的視覺(jué)運(yùn)動(dòng)控制解決方案。

可選6-64軸運(yùn)動(dòng)控制(脈沖+EtherCAT總線)
內(nèi)置實(shí)時(shí)內(nèi)核MotionRT7,支持第三方視覺(jué)軟件
板載20路通用輸入(其中10路為高速輸入),20路高速輸出
提供一體化開(kāi)放式IPC形態(tài)的實(shí)時(shí)軟控制器/軟PLC集成的視覺(jué)+運(yùn)動(dòng)控制解決方案
多核并行運(yùn)算,能夠高效處理運(yùn)動(dòng)控制,機(jī)器視覺(jué)等自動(dòng)化設(shè)備核心任務(wù)
審核編輯 黃宇
-
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
162文章
4405瀏覽量
120576
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在LED燈噴膠解決方案
DELTA并聯(lián)機(jī)械手視覺(jué)方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng)

DELTA并聯(lián)機(jī)械手視覺(jué)方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng) #正運(yùn)動(dòng)技術(shù) #機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)SCARA天地蓋貼合的解決方案

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)SCARA天地蓋貼合的解決方案#正運(yùn)動(dòng)技術(shù) #機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī) #運(yùn)動(dòng)控制
高集成機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC712!

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在PCB跟隨點(diǎn)膠上的應(yīng)用
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料應(yīng)用

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料的應(yīng)用#機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開(kāi)放式CNC應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論