

引言
在計算機視覺領域,目標檢測一直是研究的熱點和難點之一。特別是在小目標檢測方面,由于小目標在圖像中所占比例小、特征不明顯,使得檢測難度顯著增加。隨著深度學習技術的快速發(fā)展,尤其是卷積神經(jīng)網(wǎng)絡(CNN)的廣泛應用,小目標檢測的性能得到了顯著提升。本文將詳細探討基于深度學習的小目標檢測技術,包括其定義、挑戰(zhàn)、常用方法以及未來發(fā)展方向。
小目標檢測的定義與意義
小目標檢測廣義上指在圖像或視頻中檢測和識別尺寸較小、面積較小的目標物體。具體來說,小目標的定義取決于應用場景,但一般可認為是指尺寸小于32x32像素的物體。在COCO數(shù)據(jù)集中,針對三種不同大小的圖片提出了測量標準,其中約41%的目標屬于小目標(面積<32x32)。
小目標檢測的意義在于其廣泛的應用價值。在交通監(jiān)控領域,小目標檢測可用于識別交通信號燈、車牌等;在醫(yī)學影像分析領域,可用于識別微小的腫瘤細胞等;在自動駕駛領域,可用于識別微小的障礙物,以彌補激光雷達難以探測的窘?jīng)r。因此,提高小目標檢測的準確性對于提升相關應用的效果具有重要意義。
小目標檢測的挑戰(zhàn)
小目標檢測的主要挑戰(zhàn)在于其相對于背景的顯著性非常低,且由于尺寸小,包含的信息量也較少,這使得識別和定位變得更加困難。具體來說,小目標檢測的挑戰(zhàn)主要包括以下幾個方面:
- 分辨率低 :小目標在圖像中所占比例小,導致特征信息不明顯,難以提取。
- 背景復雜 :小目標往往被復雜背景所包圍,容易受到背景噪聲的干擾。
- 數(shù)據(jù)不平衡 :在數(shù)據(jù)集中,小目標的樣本數(shù)量相對較少,導致訓練模型時容易發(fā)生過擬合或欠擬合。
深度學習在小目標檢測中的應用
隨著深度學習技術的不斷發(fā)展,特別是CNN在圖像處理中的廣泛應用,小目標檢測的性能得到了顯著提升。深度學習通過自動學習和提取特征,克服了傳統(tǒng)方法中手工設計特征的局限性,提高了小目標檢測的準確性和魯棒性。
1. 常用的深度學習算法
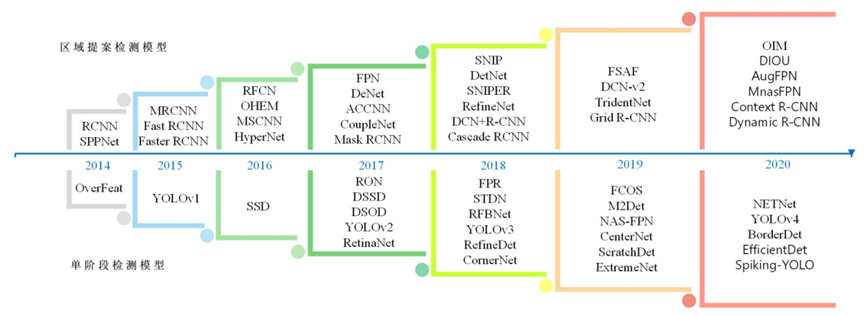
在小目標檢測中,常用的深度學習算法主要包括基于區(qū)域提議的方法(如Faster R-CNN)和基于回歸的方法(如YOLO、SSD)。這些算法通過訓練深度神經(jīng)網(wǎng)絡,實現(xiàn)了對小目標的自動檢測和識別。
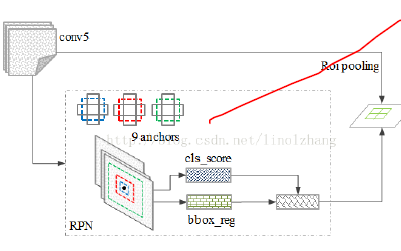
- Faster R-CNN :該方法首先使用區(qū)域提議網(wǎng)絡(RPN)生成候選區(qū)域,然后使用CNN對這些區(qū)域進行分類和邊界框回歸。Faster R-CNN在準確性方面表現(xiàn)優(yōu)異,但計算量較大,實時性較差。
- YOLO :YOLO(You Only Look Once)是一種直接對整個圖像進行分類和邊界框回歸的算法,速度較快,但相比基于區(qū)域提議的方法,準確性略有不足。YOLOv3和YOLOv4等改進版本通過增加網(wǎng)絡深度和特征融合等方法,提高了對小目標的檢測能力。
- SSD :SSD(Single Shot MultiBox Detector)在預測邊界框時使用了多尺度和多寬度的特征圖,提高了檢測的準確性。
2. 提高小目標檢測性能的方法
為了提高小目標檢測的性能,研究者們提出了多種方法,包括增加數(shù)據(jù)樣本、改進網(wǎng)絡結(jié)構(gòu)、多尺度特征融合等。
- 數(shù)據(jù)增強 :通過尺度變換、隨機裁剪、復制粘貼等方式增加小目標樣本的數(shù)量和多樣性,從而提高模型的泛化能力和魯棒性。例如,在Augmentation for Small Object Detection一文中,提出了使用過采樣和分割Mask摳圖等方法來增加小目標樣本的數(shù)量。
- 多尺度特征融合 :由于小目標在不同尺度下會有不同的表現(xiàn),因此多尺度特征融合的方法被廣泛應用于小目標檢測。FPN(Feature Pyramid Networks)和PAN(Path Aggregation Network)等網(wǎng)絡結(jié)構(gòu)通過在不同層取特征進行融合,提高了檢測性能。
- 注意力機制 :注意力機制可以將模型的注意力集中到重要區(qū)域,從而提高對小目標的檢測能力。SENet和SKNet等注意力機制通過對特征圖進行加權處理,將更多的注意力集中到小目標所在的區(qū)域。
- 模型微調(diào) :在小分辨率的圖片上訓練模型,或者使用大分辨率的圖片訓練的模型在小圖上微調(diào),可以提高小目標檢測的準確性。此外,還可以采用多尺度輸入和動態(tài)反饋機制等策略來優(yōu)化訓練過程。
3. 具體應用案例
在實際應用中,基于深度學習的小目標檢測技術已經(jīng)取得了顯著成果。例如,在自動駕駛領域,通過小目標檢測可以識別出道路上的微小障礙物,提高自動駕駛系統(tǒng)的安全性。在醫(yī)學影像分析領域,通過小目標檢測可以識別出微小的腫瘤細胞,為醫(yī)生提供更準確的診斷依據(jù)。
未來發(fā)展方向
隨著深度學習技術的不斷發(fā)展,小目標檢測的性能將進一步提升。未來發(fā)展方向主要包括以下幾個方面:
- 優(yōu)化模型結(jié)構(gòu) :通過改進網(wǎng)絡結(jié)構(gòu),提高模型的計算效率和檢測性能。例如,開發(fā)輕量級但高效的神經(jīng)網(wǎng)絡架構(gòu),減少模型參數(shù)和計算量,同時保持或提升檢測精度。
- 跨域?qū)W習與遷移學習 :利用遷移學習技術,將在大規(guī)模數(shù)據(jù)集上預訓練的模型遷移到小目標檢測任務中,利用預訓練模型強大的特征提取能力,加快小目標檢測模型的訓練速度并提高性能。同時,探索跨域?qū)W習技術,將不同領域或不同數(shù)據(jù)集的知識遷移至小目標檢測任務,以應對數(shù)據(jù)稀缺和多樣性不足的問題。
- 無監(jiān)督與半監(jiān)督學習 :鑒于標注大量小目標數(shù)據(jù)集的困難和成本,未來可以探索無監(jiān)督學習和半監(jiān)督學習方法,利用未標注或少量標注的數(shù)據(jù)進行模型訓練。例如,通過自監(jiān)督學習讓模型從大量未標注數(shù)據(jù)中學習有用的特征表示,然后利用少量標注數(shù)據(jù)進行微調(diào)。
- 上下文信息與全局感知 :小目標檢測不僅依賴于目標本身的特征,還與其周圍的上下文信息密切相關。因此,未來的研究可以更加注重利用上下文信息和全局感知能力來提高小目標的檢測性能。例如,通過引入注意力機制或圖神經(jīng)網(wǎng)絡等技術,捕捉目標與其周圍環(huán)境的關系,從而提高檢測的準確性。
- 實時性與嵌入式應用 :隨著物聯(lián)網(wǎng)和移動設備的普及,對實時性和低功耗的需求日益增加。因此,未來小目標檢測技術的發(fā)展將更加注重實時性和嵌入式應用。通過優(yōu)化算法和硬件加速技術,實現(xiàn)高效、低功耗的小目標檢測系統(tǒng),以滿足各種實時應用場景的需求。
- 多模態(tài)融合 :除了傳統(tǒng)的圖像數(shù)據(jù)外,還可以探索結(jié)合其他模態(tài)的數(shù)據(jù)(如深度信息、雷達數(shù)據(jù)、紅外圖像等)進行小目標檢測。多模態(tài)融合可以綜合利用不同模態(tài)數(shù)據(jù)的互補優(yōu)勢,提高小目標檢測的魯棒性和準確性。例如,在自動駕駛領域,結(jié)合激光雷達和攝像頭的數(shù)據(jù)進行小目標檢測,可以彌補單一傳感器在復雜環(huán)境下的不足。
- 標準化與可解釋性 :隨著小目標檢測技術的廣泛應用,建立統(tǒng)一的評估標準和數(shù)據(jù)集對于推動技術進步和實際應用具有重要意義。同時,提高模型的可解釋性也是未來研究的重要方向之一。通過可解釋性技術,揭示模型決策背后的邏輯和依據(jù),有助于增強用戶對技術的信任并推動其在實際場景中的應用。
綜上所述,基于深度學習的小目標檢測技術正面臨諸多挑戰(zhàn)和機遇。通過不斷優(yōu)化模型結(jié)構(gòu)、探索新的學習方法和應用場景、提高實時性和可解釋性等方面的努力,未來小目標檢測的性能和應用范圍將得到進一步拓展和提升。
-
目標檢測
+關注
關注
0文章
220瀏覽量
15840 -
計算機視覺
+關注
關注
8文章
1705瀏覽量
46463 -
深度學習
+關注
關注
73文章
5546瀏覽量
122281
發(fā)布評論請先 登錄
相關推薦
利用深度學習解決目標檢測任務的簡單方法
基于深度學習的目標檢測算法解析

#硬聲創(chuàng)作季 基于激光雷達數(shù)據(jù)的深度學習目標檢測方法:05-05 HyperNet、RFCN介紹

#硬聲創(chuàng)作季 基于激光雷達數(shù)據(jù)的深度學習目標檢測方法:02-01 目標檢測問題定義
【HarmonyOS HiSpark AI Camera】基于深度學習的目標檢測系統(tǒng)設計
RK3399芯片平臺的基于深度學習的目標檢測技術方案
人工智能深度學習目標檢測的詳細資料免費下載
基于深度學習的目標檢測來實現(xiàn)監(jiān)控系統(tǒng)的快速教程

基于深度學習的目標檢測技術比作一場“熱兵器革命”



基于深度學習的目標檢測、特征提取和分類
基于深度學習的目標檢測方法
簡述深度學習的基準目標檢測及其衍生算法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論