") 步進(jìn)電機(jī)旋轉(zhuǎn)角度與哪個(gè)參數(shù)有關(guān)
步進(jìn)電機(jī)旋轉(zhuǎn)角度與哪個(gè)參數(shù)有關(guān)
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為機(jī)械角位移的執(zhí)行元件,廣泛應(yīng)用于各種自動(dòng)化設(shè)備和控制系統(tǒng)中。步進(jìn)電機(jī)的旋轉(zhuǎn)角度與多個(gè)參數(shù)有關(guān),包括電機(jī)的類型、驅(qū)動(dòng)方式、控制方式、脈沖頻率等。本文將詳細(xì)介紹這些參數(shù)對(duì)步進(jìn)電機(jī)旋轉(zhuǎn)角度的影響,以及如何通過調(diào)整這些參數(shù)來實(shí)現(xiàn)精確控制。
- 步進(jìn)電機(jī)的類型
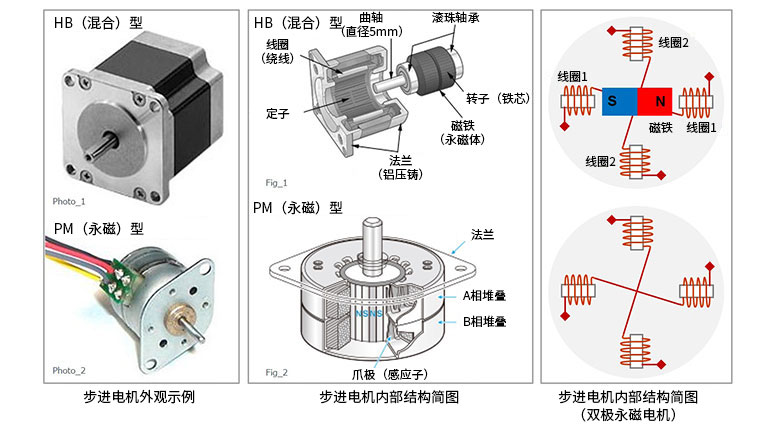
步進(jìn)電機(jī)按照結(jié)構(gòu)和工作原理的不同,可以分為永磁式、反應(yīng)式、混合式和無刷式等幾種類型。不同類型的步進(jìn)電機(jī)具有不同的性能特點(diǎn),對(duì)旋轉(zhuǎn)角度的影響也有所不同。
1.1 永磁式步進(jìn)電機(jī)
永磁式步進(jìn)電機(jī)采用永磁體作為轉(zhuǎn)子,具有較高的力矩密度和較好的動(dòng)態(tài)性能。但是,永磁式步進(jìn)電機(jī)的步距角較大,通常為1.8度或3.6度,因此旋轉(zhuǎn)角度的分辨率較低。
1.2 反應(yīng)式步進(jìn)電機(jī)
反應(yīng)式步進(jìn)電機(jī)采用軟磁材料作為轉(zhuǎn)子,具有較小的步距角,通常為1.8度或0.9度。反應(yīng)式步進(jìn)電機(jī)的力矩密度較低,但是旋轉(zhuǎn)角度的分辨率較高,適用于需要高精度控制的場(chǎng)合。
1.3 混合式步進(jìn)電機(jī)
混合式步進(jìn)電機(jī)綜合了永磁式和反應(yīng)式步進(jìn)電機(jī)的優(yōu)點(diǎn),具有較高的力矩密度和較小的步距角。混合式步進(jìn)電機(jī)的步距角可以根據(jù)需要進(jìn)行調(diào)整,通常在1.8度到0.72度之間。混合式步進(jìn)電機(jī)適用于需要較高力矩和高精度控制的場(chǎng)合。
1.4 無刷式步進(jìn)電機(jī)
無刷式步進(jìn)電機(jī)采用電子換向代替?zhèn)鹘y(tǒng)的機(jī)械換向,具有較高的效率、較低的噪音和更長(zhǎng)的使用壽命。無刷式步進(jìn)電機(jī)的步距角可以根據(jù)需要進(jìn)行調(diào)整,通常在1.8度到0.18度之間。無刷式步進(jìn)電機(jī)適用于需要高效率和高精度控制的場(chǎng)合。
- 驅(qū)動(dòng)方式
步進(jìn)電機(jī)的驅(qū)動(dòng)方式主要包括恒流驅(qū)動(dòng)和恒壓驅(qū)動(dòng)兩種。
2.1 恒流驅(qū)動(dòng)
恒流驅(qū)動(dòng)方式是指在電機(jī)運(yùn)行過程中,電流保持恒定不變。恒流驅(qū)動(dòng)方式可以提高電機(jī)的力矩輸出,但是電流的恒定會(huì)導(dǎo)致電機(jī)的轉(zhuǎn)速和旋轉(zhuǎn)角度受到限制。
2.2 恒壓驅(qū)動(dòng)
恒壓驅(qū)動(dòng)方式是指在電機(jī)運(yùn)行過程中,電壓保持恒定不變。恒壓驅(qū)動(dòng)方式可以提高電機(jī)的轉(zhuǎn)速,但是電壓的恒定會(huì)導(dǎo)致電機(jī)的力矩輸出和旋轉(zhuǎn)角度受到限制。
- 控制方式
步進(jìn)電機(jī)的控制方式主要包括開環(huán)控制和閉環(huán)控制兩種。
3.1 開環(huán)控制
開環(huán)控制是指電機(jī)的運(yùn)行狀態(tài)不反饋給控制器,控制器根據(jù)輸入的脈沖信號(hào)控制電機(jī)的運(yùn)行。開環(huán)控制方式具有結(jié)構(gòu)簡(jiǎn)單、成本低廉的優(yōu)點(diǎn),但是旋轉(zhuǎn)角度的精度較低,容易受到外部干擾的影響。
3.2 閉環(huán)控制
閉環(huán)控制是指電機(jī)的運(yùn)行狀態(tài)反饋給控制器,控制器根據(jù)反饋信號(hào)調(diào)整電機(jī)的運(yùn)行。閉環(huán)控制方式具有旋轉(zhuǎn)角度精度高、抗干擾能力強(qiáng)的優(yōu)點(diǎn),但是結(jié)構(gòu)復(fù)雜、成本較高。
- 脈沖頻率
脈沖頻率是指單位時(shí)間內(nèi)輸入到步進(jìn)電機(jī)的脈沖信號(hào)的數(shù)量。脈沖頻率對(duì)步進(jìn)電機(jī)的轉(zhuǎn)速和旋轉(zhuǎn)角度具有重要影響。
4.1 脈沖頻率與轉(zhuǎn)速的關(guān)系
脈沖頻率越高,電機(jī)的轉(zhuǎn)速越快。但是,當(dāng)脈沖頻率超過電機(jī)的額定頻率時(shí),電機(jī)的力矩輸出會(huì)下降,導(dǎo)致旋轉(zhuǎn)角度的精度降低。
4.2 脈沖頻率與旋轉(zhuǎn)角度的關(guān)系
脈沖頻率越高,電機(jī)的旋轉(zhuǎn)角度分辨率越高。但是,脈沖頻率過高會(huì)導(dǎo)致電機(jī)的動(dòng)態(tài)響應(yīng)變差,影響旋轉(zhuǎn)角度的穩(wěn)定性。
步進(jìn)電機(jī)的旋轉(zhuǎn)角度與電機(jī)的類型、驅(qū)動(dòng)方式、控制方式和脈沖頻率等多個(gè)參數(shù)有關(guān)。在選擇和使用步進(jìn)電機(jī)時(shí),需要根據(jù)具體的應(yīng)用場(chǎng)景和性能要求,綜合考慮這些參數(shù)的影響,以實(shí)現(xiàn)精確的旋轉(zhuǎn)角度控制。
此外,為了提高步進(jìn)電機(jī)的旋轉(zhuǎn)角度精度和穩(wěn)定性,還可以采取一些措施,如選擇合適的電機(jī)型號(hào)、優(yōu)化驅(qū)動(dòng)電路設(shè)計(jì)、采用先進(jìn)的控制算法等。同時(shí),還需要定期對(duì)電機(jī)進(jìn)行維護(hù)和調(diào)試,以保證其長(zhǎng)期穩(wěn)定運(yùn)行。
總之,步進(jìn)電機(jī)作為一種重要的執(zhí)行元件,在自動(dòng)化設(shè)備和控制系統(tǒng)中具有廣泛的應(yīng)用。通過深入研究和掌握步進(jìn)電機(jī)的旋轉(zhuǎn)角度與各個(gè)參數(shù)的關(guān)系,可以更好地發(fā)揮其性能優(yōu)勢(shì),滿足各種應(yīng)用需求。
-
機(jī)械
+關(guān)注
關(guān)注
8文章
1615瀏覽量
40702 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3119瀏覽量
147724 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
400瀏覽量
37044 -
自動(dòng)化設(shè)備
+關(guān)注
關(guān)注
1文章
432瀏覽量
16525
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
小白求教,怎么實(shí)現(xiàn)操縱桿控制電機(jī)的旋轉(zhuǎn)角度
如何通過NI USB 6210/6341控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn),正反轉(zhuǎn),同時(shí)編碼器采集旋轉(zhuǎn)角度
步進(jìn)電機(jī)的旋轉(zhuǎn)角度是如何計(jì)算的
為什么要測(cè)量步進(jìn)電機(jī)的旋轉(zhuǎn)角度空間分辨率
密封雙連旋轉(zhuǎn)角度不準(zhǔn)故障修理
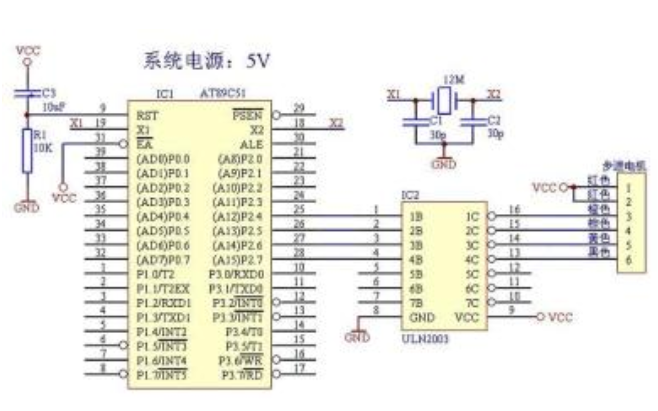
使用51單片機(jī)進(jìn)行步進(jìn)電機(jī)的驅(qū)動(dòng)和旋轉(zhuǎn)角度控制的程序免費(fèi)下載
什么是步進(jìn)電機(jī) 步進(jìn)電機(jī)基本結(jié)構(gòu)和工作原理
步進(jìn)電機(jī)的結(jié)構(gòu)
步進(jìn)電機(jī)的作用_步進(jìn)電機(jī)選型
伺服電機(jī)和步進(jìn)電機(jī)的區(qū)別和外觀區(qū)分
什么是步進(jìn)電機(jī) 步進(jìn)電機(jī)的結(jié)構(gòu)

如何使用Grove Starter Kit Plus旋轉(zhuǎn)角度傳感器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論