 愛普生新款陀螺儀傳感器GGPM01LK于掃地機器人的應用
愛普生新款陀螺儀傳感器GGPM01LK于掃地機器人的應用
在電子技術的不斷發展下,人們對于機器人的要求越來越高,導致企業對機器人的設計和性能要求也變得嚴格起來。就掃地機器人而言,對于其姿態控制和運動穩定性的要求非常嚴格。針對如今嚴格的要求,愛普生推出了一款令人稱道的陀螺儀傳感器這款新產品采用了最先進的技術,旨在提高掃地機器人的清掃效率和運動穩定性。

GGPM01LK陀螺儀傳感器基于愛普生QMEMS技術的完全獨立的數字陀螺儀,為掃地機器人提供了一個低成本但又高精度的傳感解決方案,以其超低漂移、高分辨率和精度、低功耗、小尺寸、高可靠性成為清潔機器人機械或光學陀螺儀理想的替代品,可廣泛應用于清潔機器人制導和控制系統。
這款專用陀螺儀傳感器GGPM01LK具有許多令人印象深刻的特點。首先,它采用了最新的MEMS技術,能夠實現更高的精度和穩定性。其次,在我們南山電子對其的特性分析中發現,它采用了先進的數字信號處理技術,能夠更準確地檢測掃地機器人的運動狀態和位置。此外,它還具有快速響應和低能耗的特點,能夠有效延長掃地機器人的續航時間。
與傳統的陀螺儀傳感器相比,這款GGPM01LK傳感器還具有更小的體積和更輕的重量,能夠更方便地集成到掃地機器人中。而且,它還具有更強的抗干擾能力,能夠在復雜環境下更穩定地工作。
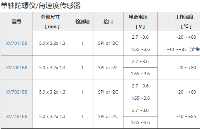
和之前的出產的產品GGPM01A相比,GGPM01LK是GGPM01A的升級版,功能不僅一致,同時也修復了先前版本的bug,讓角度偏差變得更小了。而與GGPM01LKS相比,GGPM01LK可以支持IIC和UART兩種通信方式,并且模塊增加了屏蔽罩;而GGPM01LKS僅可支持IIC通信,并且模塊不帶屏蔽罩。從我們南山電子的數據中顯示GGPM01LK更加的泛用以及更加的安全。I2C模塊只能用于I2C通訊,不能用于串口通訊;而串口模塊既可以用于I2C通訊,又可以用于串口通訊。只需改變一下管腳1的狀態即可。
UART串口協議

數據輸出格式

關于GGPM01LK的安裝事項
a.模組的安裝角度,請盡量水平安裝,模組的法線和機器的旋轉軸平行;
b.模組務必可靠安裝,保證工作過程中不松動;
c.模組盡量不要靠近熱源,發熱大的或者發熱變化大的區域,比如電源功率部分,馬達驅動功率部分等,這些地方通常發熱比較厲害,而且冷熱不均勻;
d.運行過程中,盡量平穩,避免大的碰撞,避免突然之間大角度的旋轉,盡量按照(停止,加速,勻速,減速,停止)這樣的運動行為保證運動的平滑性;
e.工作過程中盡量避免一個方向旋轉,盡量讓旋轉的總的角度和的絕對值最小,特別是在避障過程中避免一個方向旋轉,當發現一個方向旋轉的角度值比較大,則找到適當的機會反方向旋轉回來,盡量讓總的角度值絕對值達到最小值。
愛普生創立與1942年,到如今已經有八十年左右的歷史。從過去到現在,以及未來,愛普生(EPSON)一直堅持”省,小,精”的理念,希望在更廣闊的市場中為客戶提供“方便,可靠,節能”的產品。作為愛普生授權銷售的江蘇南山電子工業有限公司而言,這些也是我們從一而終所強調的。想要具體了解愛普生(EPSON)開發新IMU產品M-G370PDS改善姿態和震動控制的相關產品信息,請向我們咨詢。
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755797 -
EPSON
+關注
關注
1文章
135瀏覽量
85753 -
愛普生
+關注
關注
0文章
333瀏覽量
22197 -
陀螺儀傳感器
+關注
關注
1文章
39瀏覽量
13743 -
掃地機器人
+關注
關注
21文章
792瀏覽量
53584
發布評論請先 登錄
相關推薦
淺談掃地機器人用到的那些電子元器件!
霍爾開關在掃地機器人中的應用

供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
愛普生(EPSON)陀螺儀傳感器的特點和應用領域介紹
用“芯”提升機器人性能,掃地機器人有望提高滲透率
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
適用于割草機器人,商用服務型機器人的高精度陀螺儀模組GGPM61
用于AGV物流機器人的愛普生陀螺儀傳感器XV7000系列:XV7001BB,XV7011BB

陀螺儀傳感器,IMU和加速度計的產品和選型
愛普生陀螺儀模塊助力智能泳池清潔機器人導航方案

愛普生(EPSON)應用于割草機慣性導航高性能陀螺儀傳感器SGPM01
解析愛普生(EPSON)陀螺儀傳感器XV-3510CB






 工商網監
工商網監
評論