") 如何使用基于AI的振動(dòng)傳感器節(jié)點(diǎn)進(jìn)行故障分類(lèi)
如何使用基于AI的振動(dòng)傳感器節(jié)點(diǎn)進(jìn)行故障分類(lèi)
許多工業(yè)工廠依靠電機(jī)來(lái)執(zhí)行生產(chǎn)過(guò)程。由于結(jié)構(gòu)松動(dòng)、軸承損壞、角度和線性不對(duì)準(zhǔn)、腐蝕、共振和負(fù)載不平衡等影響,電機(jī)容易發(fā)生故障。
任何這些都可能導(dǎo)致長(zhǎng)時(shí)間的機(jī)器停機(jī)。防止此類(lèi)故障一直是制造業(yè)企業(yè)面臨的長(zhǎng)期挑戰(zhàn),因?yàn)樗麄儗で笞畲笙薅鹊亟档统杀静⑻岣呱a(chǎn)率。
基于計(jì)劃的維護(hù)策略可以通過(guò)在預(yù)定的時(shí)間間隔內(nèi)調(diào)整和更換零件和子系統(tǒng)來(lái)實(shí)現(xiàn)這些目標(biāo)。不幸的是,基于計(jì)劃的維護(hù)可能會(huì)導(dǎo)致不必要的維護(hù)。而狀態(tài)維修則是根據(jù)設(shè)備的實(shí)際情況調(diào)整維修方案,提高效率和可靠性。
用于預(yù)測(cè)性維護(hù)的傳感器
預(yù)測(cè)性維護(hù)(PdM)可以提供進(jìn)一步的改進(jìn)。使用最新的高精度慣性傳感器和具有短距離或長(zhǎng)距離無(wú)線連接的低功耗、高性能邊緣AI設(shè)備,可以連續(xù)實(shí)時(shí)收集和分析關(guān)鍵機(jī)器數(shù)據(jù)(圖1)。
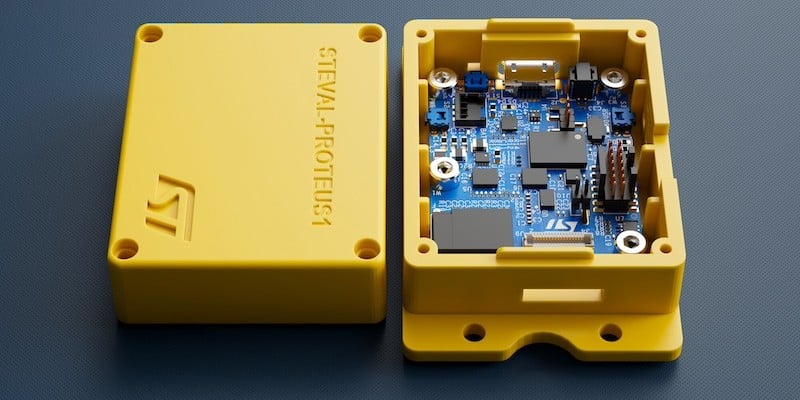
圖1
.聯(lián)合收割機(jī)結(jié)合振動(dòng)和MEMS溫度傳感器、電源管理、安全元件和運(yùn)行機(jī)器學(xué)習(xí)庫(kù)的STM 32 MCU,無(wú)需占用太多空間或功耗,即可監(jiān)控設(shè)備和檢測(cè)故障。
在這種情況下,人工智能提供了幾個(gè)優(yōu)勢(shì),可以實(shí)現(xiàn)實(shí)時(shí)和分布式數(shù)據(jù)分析,并在問(wèn)題升級(jí)之前識(shí)別潛在問(wèn)題。這種積極主動(dòng)的方法可以最大限度地減少停機(jī)時(shí)間,降低維護(hù)成本,并通過(guò)在需要時(shí)精確解決問(wèn)題來(lái)延長(zhǎng)機(jī)器的使用壽命,從而優(yōu)化整體運(yùn)營(yíng)效率。
為了監(jiān)控這些機(jī)器,來(lái)自運(yùn)動(dòng)傳感器(加速度計(jì),陀螺儀)的數(shù)據(jù),通過(guò)不同的算法處理,可以在生產(chǎn)過(guò)程中連續(xù)分析電機(jī)的振動(dòng)狀態(tài)。nbsp;
利用機(jī)器學(xué)習(xí)進(jìn)行預(yù)測(cè)性維護(hù)
預(yù)測(cè)性維護(hù)的主要支柱是狀態(tài)監(jiān)測(cè)。使用數(shù)字3軸微機(jī)電系統(tǒng)(MEMS)傳感器的經(jīng)典狀態(tài)監(jiān)測(cè)方法依賴(lài)于作為控制單元操作的微控制器(MCU)來(lái)驅(qū)動(dòng)電源管理,執(zhí)行數(shù)據(jù)記錄功能,然后使用常規(guī)時(shí)域和頻域分析來(lái)處理數(shù)據(jù)。
當(dāng)機(jī)器正常運(yùn)行時(shí),監(jiān)測(cè)到的振動(dòng)與標(biāo)準(zhǔn)分析模型密切相關(guān)。為了預(yù)測(cè)任何傾向于故障的漂移,PdM實(shí)施必須通過(guò)將振動(dòng)數(shù)據(jù)與預(yù)定義的閾值進(jìn)行比較來(lái)評(píng)估設(shè)備狀態(tài)。
這種經(jīng)典的方法具有局限性,因?yàn)樗枰钊氲南到y(tǒng)機(jī)械和數(shù)學(xué)模型以及編程知識(shí)來(lái)構(gòu)建算法和規(guī)則。此外,分析模型、算法和閾值具有有限的靈活性。如果資源或工作條件發(fā)生變化,就必須重寫(xiě)規(guī)則。
在基于人工智能的方法中,神經(jīng)網(wǎng)絡(luò)模型和機(jī)器學(xué)習(xí)算法允許系統(tǒng)從數(shù)據(jù)中不斷學(xué)習(xí),并相應(yīng)地改進(jìn)其模型。當(dāng)設(shè)備條件發(fā)生變化時(shí),預(yù)測(cè)模型的準(zhǔn)確性和性能可以得到提高,而無(wú)需調(diào)整算法或理解工藝規(guī)則。
參考設(shè)計(jì)套件
在這篇文章中,我們提出了一個(gè)系統(tǒng)解決方案的基礎(chǔ)上STEVAL-PROTEUS 1參考設(shè)計(jì)套件,一個(gè)工業(yè)無(wú)線傳感器節(jié)點(diǎn),具有緊湊的外形。該設(shè)計(jì)套件集成了MEMS傳感器、藍(lán)牙連接和嵌入式AI庫(kù),可檢測(cè)被監(jiān)控設(shè)備中的異常并對(duì)故障進(jìn)行分類(lèi)。它通過(guò)USB電纜將結(jié)果發(fā)送到PC終端控制臺(tái),或無(wú)線發(fā)送到相關(guān)的移動(dòng)的應(yīng)用程序STBLESensor。此應(yīng)用程序以圖形方式顯示結(jié)果,并與云共享數(shù)據(jù)(圖2)。
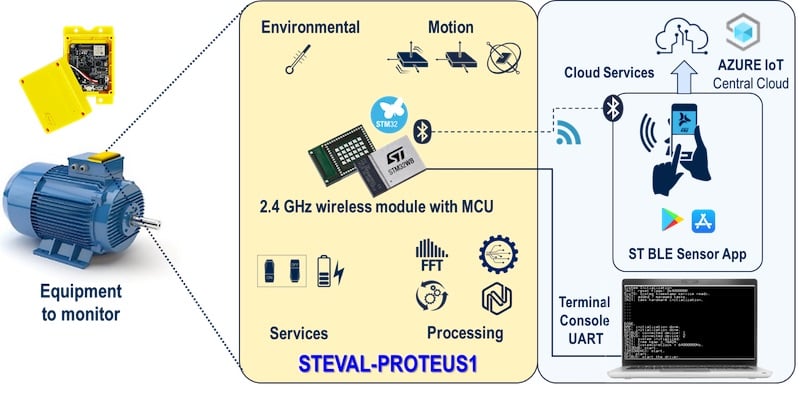
圖2
.用于預(yù)測(cè)性維護(hù)的設(shè)備監(jiān)控
挑戰(zhàn)在于使用n分類(lèi)機(jī)器學(xué)習(xí)模型早期檢測(cè)通常較晚檢測(cè)到的機(jī)械漂移。我們的目標(biāo)是識(shí)別和分類(lèi)插入線性錯(cuò)位增量大小,與“幾十毫米級(jí)”的精度。
參考設(shè)計(jì)架構(gòu)
STEVAL—PROTEUS1套件是一款專(zhuān)為工業(yè)應(yīng)用中的溫度和振動(dòng)監(jiān)測(cè)而設(shè)計(jì)的評(píng)估工具。主板(STEVAL—PROTEUS,圖3)包括一個(gè)經(jīng)過(guò)認(rèn)證的無(wú)線電模塊、用于振動(dòng)監(jiān)測(cè)的工業(yè)MEMS慣性傳感器組合、一個(gè)高精度溫度傳感器、電源管理和保護(hù)電路以及用于代碼和數(shù)據(jù)存儲(chǔ)的2 Gb閃存。
該板還提供STSAFE-A110安全元件,可為本地或遠(yuǎn)程主機(jī)提供身份驗(yàn)證和安全數(shù)據(jù)管理服務(wù)。所有組件都專(zhuān)門(mén)安裝在PCB的頂側(cè),以方便直接連接。
無(wú)線模塊STM32 WB 5 MMG具有超低功耗的小尺寸和STM32 WB 55 VGY無(wú)線SoC。該SoC包含一個(gè)2.4 GHz集成RF部分,其中Arm Cortex-M4內(nèi)核用于應(yīng)用處理,Cortex-M0+用于管理無(wú)線電層。M0+可以托管藍(lán)牙低功耗(BLE)5、802.15.4、Zigbee 3.0、Thread或?qū)S熊浖榷褩!?/p>

圖3
. STEVAL-PROTEUS董事會(huì)
為了加快應(yīng)用程序開(kāi)發(fā),該套件附帶了一個(gè)用于異常檢測(cè)和分類(lèi)的固件包,可在Cortex-M4上運(yùn)行。使用來(lái)自慣性傳感器的原始數(shù)據(jù),AI算法可以提供任何問(wèn)題的早期警告,例如不平衡或磨損。nbsp;
嵌入式AI是一個(gè)由NanoEdge AI Studio軟件工具生成的機(jī)器學(xué)習(xí)庫(kù)。它從STEVAL-PROTEUS板上的傳感器輸出生成的特定數(shù)據(jù)集開(kāi)始。NanoEdge AI Studio軟件提取所需用例的機(jī)器學(xué)習(xí)庫(kù)-例如異常檢測(cè)或分類(lèi)-將集成到傳感器節(jié)點(diǎn)上的MCU中。nbsp;
為了遠(yuǎn)程感知機(jī)器狀態(tài),當(dāng)檢測(cè)到異常時(shí)發(fā)出指示,節(jié)點(diǎn)使用藍(lán)牙連接到STBLESensor應(yīng)用程序。該應(yīng)用程序允許用戶設(shè)置傳感器和庫(kù)參數(shù),控制學(xué)習(xí)和檢測(cè)模式,并監(jiān)控設(shè)備故障狀態(tài)。
信號(hào)處理和ML模型生成
通常,傳感器以原始形式提供數(shù)據(jù),這不適合傳統(tǒng)的預(yù)測(cè)性維護(hù)應(yīng)用。在傳統(tǒng)算法或基于ML的算法開(kāi)始操作數(shù)據(jù)之前,必須使用過(guò)濾、整形和其他預(yù)處理方法。為了最佳地設(shè)計(jì)預(yù)處理和處理鏈,設(shè)計(jì)人員必須了解信號(hào)的特性。
STEVAL-PROTEUS節(jié)點(diǎn)可以從機(jī)載慣性傳感器獲取振動(dòng)數(shù)據(jù),并使用STM32 WB MCU直接在邊緣處理數(shù)據(jù)。nbsp;
在狀態(tài)監(jiān)測(cè)中,傳感器信號(hào)是沿沿著x—y—z軸的加速度樣本的集合。圖4顯示了在時(shí)域和頻域中表示的與正常機(jī)器條件對(duì)應(yīng)的振動(dòng)。
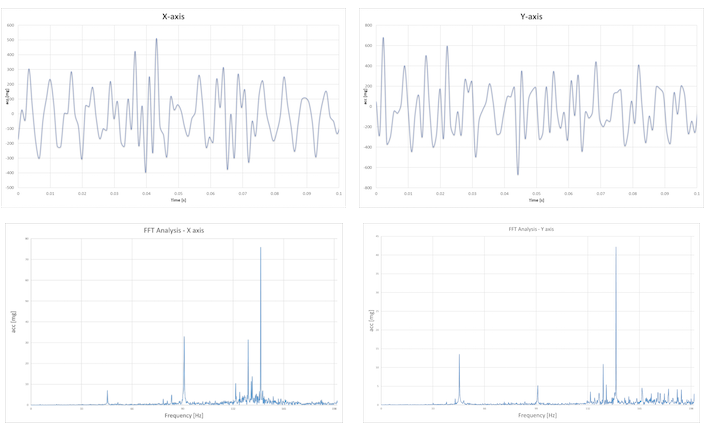
圖4
.原始和轉(zhuǎn)換的傳感器信號(hào)。單擊放大圖像
樣本存儲(chǔ)在應(yīng)用程序固件中實(shí)現(xiàn)的循環(huán)數(shù)據(jù)緩沖區(qū)中。圖5總結(jié)了數(shù)據(jù)生產(chǎn)、處理和發(fā)送結(jié)果的邏輯流程。
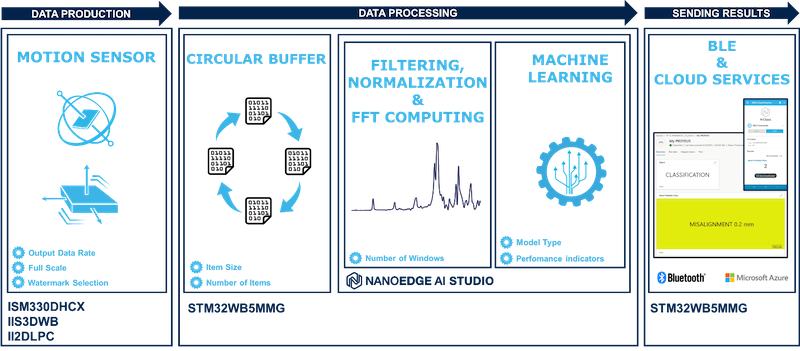
圖5
. STEVAL-PROTEUS傳感、處理和通信
在這個(gè)例子中,NanoEdgeAI(NEAI)Studio生成了一個(gè)包含預(yù)處理塊和ML模型的庫(kù)。該工具包含自動(dòng)化機(jī)器學(xué)習(xí)軟件,讓嵌入式開(kāi)發(fā)人員無(wú)需廣泛的機(jī)器學(xué)習(xí)或數(shù)據(jù)科學(xué)知識(shí)即可開(kāi)始使用。它可以生成一個(gè)預(yù)編譯的C庫(kù),可以集成到STM32 MCU中。通過(guò)遵循圖6所示的工作流程,用戶可以使用NanoEdge AI Studio獲得可靠的庫(kù)。
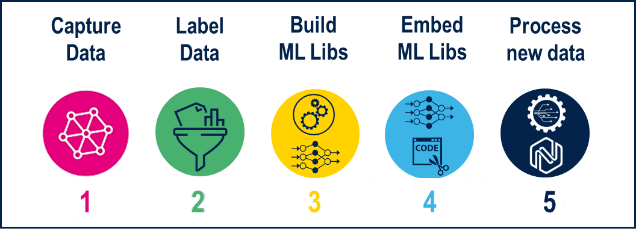
圖6
. NanoEdge AI Studio工作流程
本示例的目的是將電機(jī)軸不對(duì)準(zhǔn)分為四個(gè)嚴(yán)重性類(lèi)別。第一步是定義四個(gè)類(lèi)。然后,您將使用高速數(shù)據(jù)記錄固件獲取加速度計(jì)數(shù)據(jù),以生成每個(gè)類(lèi)的數(shù)據(jù)集。
STEVAL-PROTEUS板上的ISM 330 DHCX加速度計(jì)配置為標(biāo)稱(chēng)輸出數(shù)據(jù)速率為833 Hz,滿量程為2 g。幾個(gè)預(yù)采集周期有助于識(shí)別電機(jī)速度的這些參數(shù),以確保正確的采樣頻率和x-y-z軸上的最大加速度值。nbsp;
注入條件定義數(shù)據(jù)集:
無(wú)未對(duì)準(zhǔn)或標(biāo)稱(chēng)條件
0.20 mm錯(cuò)位
0.40 mm錯(cuò)位
0.60 mm錯(cuò)位
然后,您需要?jiǎng)?chuàng)建一個(gè)N類(lèi)分類(lèi)NEAI項(xiàng)目,并將STEVAL-PROTEUS 1作為目標(biāo)。然后可以導(dǎo)入這四個(gè)數(shù)據(jù)集,基準(zhǔn)測(cè)試可以根據(jù)幾個(gè)性能指標(biāo)和內(nèi)存占用來(lái)確定最佳模型。nbsp;
數(shù)據(jù)集包括423條線或信號(hào),每個(gè)信號(hào)包含128 × 3個(gè)樣本。(Note一個(gè)樣本包括對(duì)應(yīng)于在三個(gè)軸上測(cè)量的加速度的三個(gè)值)。循環(huán)緩沖區(qū)的大小取決于信號(hào)的大小:即每個(gè)項(xiàng)目128 × 3個(gè)樣本。
在基準(zhǔn)測(cè)試過(guò)程中,NanoEdge AI Studio會(huì)訓(xùn)練、交叉驗(yàn)證和測(cè)試候選庫(kù)。它為每個(gè)候選人分配一個(gè)分?jǐn)?shù),并在基準(zhǔn)測(cè)試完成時(shí)提供一個(gè)排名。圖7顯示了與從排名中選擇的模型相對(duì)應(yīng)的基準(zhǔn)圖。
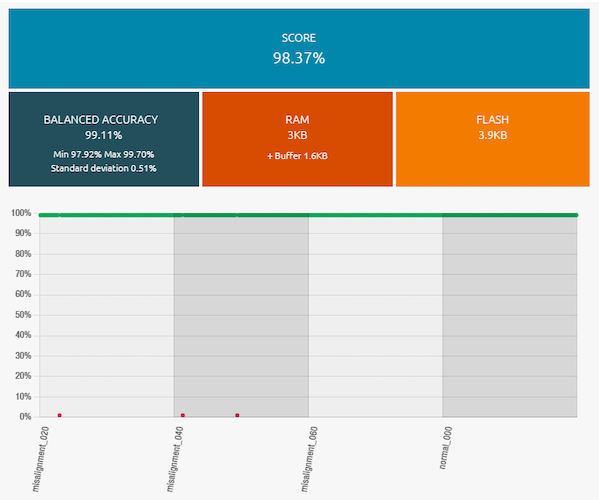
圖7
. NEAI模型的基準(zhǔn)測(cè)試
在這個(gè)例子中,基準(zhǔn)測(cè)試需要23分鐘。選擇的SEFR(可擴(kuò)展、高效和快速分類(lèi))模型使用約3 KB的RAM和4 KB的閃存。換句話說(shuō),NEAI處理占用了6.4%的RAM和0.5%的STEVAL-PROTEUS板載閃存。(Note:這些百分比的計(jì)算考慮了使用FUS v1.2.0.0和BLE全棧v1.13.0.5的用戶應(yīng)用程序的可用RAM和閃存,)
NanoEdge AI Studio提供了幾個(gè)性能指標(biāo)來(lái)評(píng)估模型性能,如圖8所示。在這些指標(biāo)中,平衡精度是數(shù)據(jù)集平衡的多類(lèi)分類(lèi)問(wèn)題中最重要的值之一。在多類(lèi)分類(lèi)問(wèn)題中,如果每個(gè)類(lèi)包含相同數(shù)量的樣本,則數(shù)據(jù)集是平衡的。
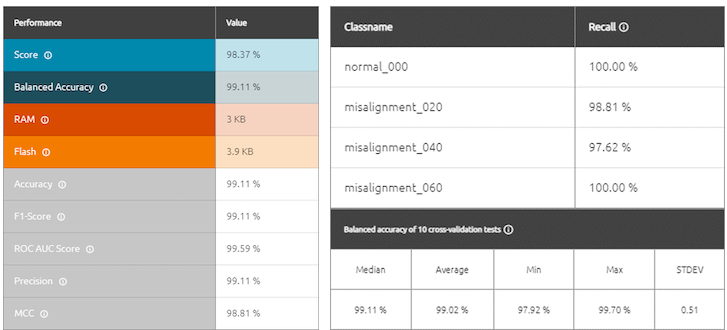
圖8
.模型性能指標(biāo)
信號(hào)處理鏈包括傳統(tǒng)信號(hào)處理功能和SEFR多類(lèi)分類(lèi)器機(jī)器學(xué)習(xí)算法的組合,以識(shí)別四個(gè)級(jí)別的未對(duì)準(zhǔn)(圖9)。
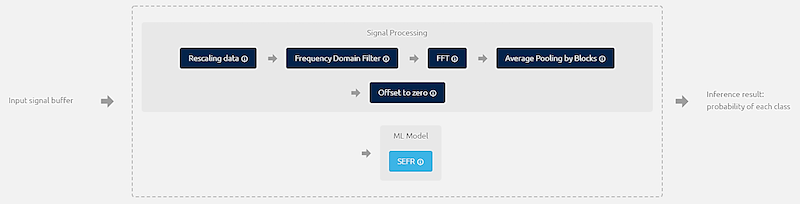
圖9
.用AI增強(qiáng)信號(hào)處理鏈。單擊放大圖像
接下來(lái),軟件功能包(FP-AI-PDMWBSOC)有助于加速M(fèi)CU(STM32 WB)上的ML模型部署。該軟件包專(zhuān)為STEVAL-PROTEUS 1開(kāi)發(fā),將NEAI庫(kù)集成在一個(gè)適合管理不同類(lèi)型傳感器和連接的環(huán)境中。
在傳感器管理器模塊中,多個(gè)傳感器線程處理傳感器初始化、配置和數(shù)據(jù)生成。數(shù)據(jù)構(gòu)建器可以從傳感器任務(wù)中獲取少量數(shù)據(jù),并對(duì)其進(jìn)行操作以填充循環(huán)緩沖區(qū)。稍后,當(dāng)一個(gè)項(xiàng)目準(zhǔn)備就緒時(shí),NEAI線程處理數(shù)據(jù)。
這使得數(shù)據(jù)能夠通過(guò)如前所述的處理鏈。STEVAL-PROTEUS節(jié)點(diǎn)通過(guò)藍(lán)牙連接到客戶端設(shè)備(如智能手機(jī))共享結(jié)果(減少到幾個(gè)字節(jié))。
系統(tǒng)設(shè)置和結(jié)果
故障分類(lèi)解決方案可以使用伊勢(shì)開(kāi)發(fā)的OneX工具等專(zhuān)業(yè)測(cè)試臺(tái)進(jìn)行驗(yàn)證。這可以模擬電機(jī)最常見(jiàn)的故障,例如軸不對(duì)中、不平衡負(fù)載、結(jié)構(gòu)松動(dòng)和軸承損壞。
測(cè)試臺(tái)包含一個(gè)電機(jī)和驅(qū)動(dòng)器,帶有機(jī)械聯(lián)軸器和軸,模擬不平衡的配重盤(pán)和三個(gè)軸承。軸承箱允許應(yīng)用受控的未對(duì)準(zhǔn)或安裝損壞的軸承,以進(jìn)行分析。nbsp;
圖10
.使用OneX工具進(jìn)行測(cè)試設(shè)置
如圖10所示,我們將STEVAL-PROTEUS節(jié)點(diǎn)連接到第二個(gè)關(guān)節(jié)面上。馬達(dá)速度設(shè)定為3000 rpm。然后,測(cè)試逐漸引入更大的軸承軸不對(duì)準(zhǔn),保持其他實(shí)驗(yàn)參數(shù)相同。PROTEUS節(jié)點(diǎn)在所有四個(gè)類(lèi)別中正確識(shí)別出未對(duì)準(zhǔn),并將結(jié)果傳達(dá)給智能手機(jī)應(yīng)用程序。
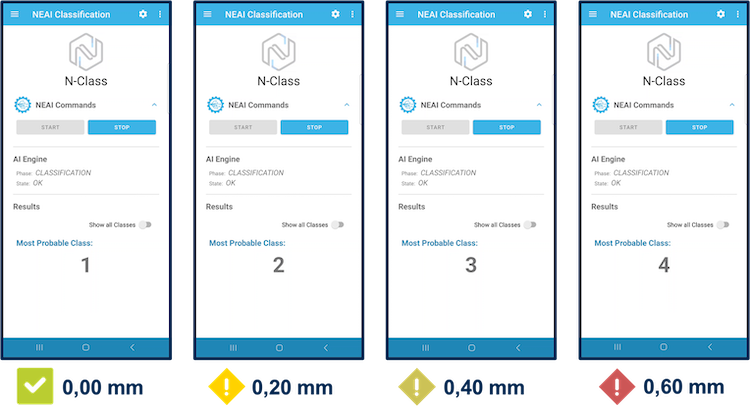
圖11
.結(jié)果顯示在移動(dòng)的應(yīng)用程序上。
如圖11所示,移動(dòng)的應(yīng)用程序顯示與所識(shí)別的條件相對(duì)應(yīng)的數(shù)字。該應(yīng)用程序還負(fù)責(zé)與云共享結(jié)果。
使用相同的程序應(yīng)用其他電機(jī)故障以生成適當(dāng)?shù)腗L庫(kù)的進(jìn)一步測(cè)試表明,使用PROTEUS節(jié)點(diǎn)進(jìn)行推理也可以正確識(shí)別正常和不平衡負(fù)載、機(jī)械松動(dòng)和軸承故障。
設(shè)備故障的早期檢測(cè)
通過(guò)人工智能(AIoT)增強(qiáng)的物聯(lián)網(wǎng)傳感器節(jié)點(diǎn)通過(guò)支持早期檢測(cè)工業(yè)設(shè)備行為中的漂移來(lái)提高預(yù)測(cè)性維護(hù)應(yīng)用的有效性。
傳感器豐富的STEVAL-PROTEUS節(jié)點(diǎn)與使用NanoEdge AI Studio開(kāi)發(fā)的推理應(yīng)用程序相結(jié)合,可以檢測(cè)異常振動(dòng)并根據(jù)嚴(yán)重程度正確識(shí)別未對(duì)準(zhǔn)的幅度。
該傳感器和應(yīng)用程序可以量化十分之一毫米量級(jí)的軸不對(duì)中,或小于1克的不平衡。此外,該節(jié)點(diǎn)的藍(lán)牙連接通過(guò)在系統(tǒng)解決方案中包含藍(lán)牙低功耗網(wǎng)關(guān),實(shí)現(xiàn)工廠內(nèi)外的遠(yuǎn)程監(jiān)控。
審核編輯 黃宇
-
節(jié)點(diǎn)
+關(guān)注
關(guān)注
0文章
220瀏覽量
24477 -
AI
+關(guān)注
關(guān)注
87文章
31399瀏覽量
269808 -
PDM
+關(guān)注
關(guān)注
2文章
100瀏覽量
17903 -
振動(dòng)傳感器
+關(guān)注
關(guān)注
2文章
323瀏覽量
19856
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
使用MEMS傳感器進(jìn)行振動(dòng)監(jiān)測(cè)

無(wú)線WIFI振動(dòng)傳感器安裝簡(jiǎn)單
振動(dòng)傳感器
振動(dòng)傳感器的結(jié)構(gòu)分類(lèi)
一文讀懂什么是振動(dòng)傳感器
關(guān)于振動(dòng)傳感器的分類(lèi)及工作原理的介紹
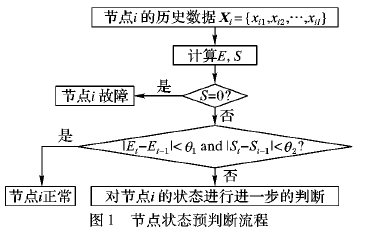
使用鄰居節(jié)點(diǎn)預(yù)狀態(tài)進(jìn)行的無(wú)線傳感器網(wǎng)絡(luò)故障診斷算法
振動(dòng)傳感器的工作原理、分類(lèi)和特點(diǎn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論