") 迎來“CASE”時代的汽車趨勢和技術(shù)課題(2) ~電池管理系統(tǒng)~
迎來“CASE”時代的汽車趨勢和技術(shù)課題(2) ~電池管理系統(tǒng)~
加速電動汽車(EV)實際應(yīng)用的鋰離子電池
電動汽車(EV)的開發(fā)目標(biāo)是實現(xiàn)與汽油動力車和柴油動力車相媲美的駕駛性能和巡航里程。在各種技術(shù)開發(fā)促進電動汽車發(fā)展的進程中,體積能量密度和重量能量密度都比傳統(tǒng)的鎳氫電池高數(shù)倍以上的鋰離子電池的出現(xiàn)可以說大大加速了電動汽車的實際應(yīng)用。
鋰離子電池一般是指用鋰過渡金屬復(fù)合氧化物作正極,用碳材料作負極的電池,但也有用鋰基氧化物作負極而不是正極的電池,各種材料的組合已進入實際應(yīng)用階段。
鋰離子電池具有優(yōu)異的體積能量密度和重量能量密度,但為了達到與汽油動力車和柴油動力車相同的巡航里程,傳統(tǒng)上必須配備一個相當(dāng)大的電池單元。但是現(xiàn)在,不僅電池的性能得到了提高,驅(qū)動馬達的功率半導(dǎo)體的效率等也得到了提高,甚至小型電動汽車的巡航里程也超過400km(WLTC模式)。
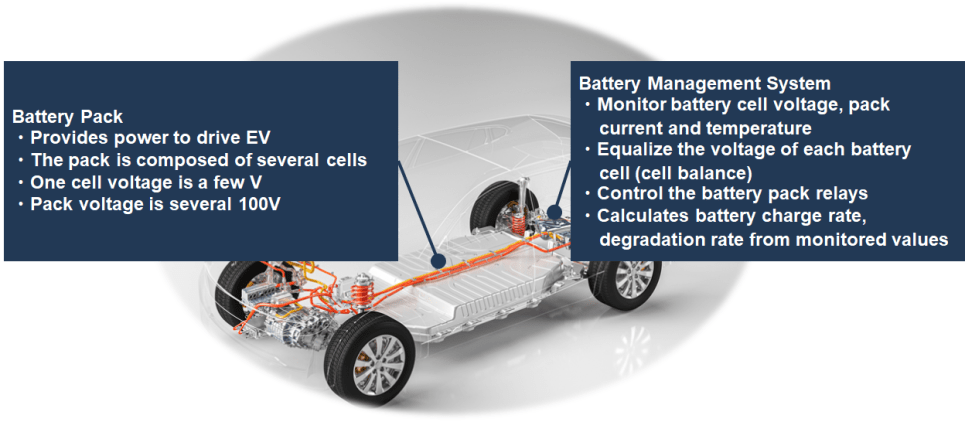
安全的充放電控制中不可或缺的電池管理系統(tǒng)(BMS)
電池管理系統(tǒng)(BMS)在提高安裝在電動汽車上的電池性能方面起著重要作用。該系統(tǒng)由電子電路和軟件構(gòu)成,主要具備以下兩個功能:
過電壓、過電流、異常發(fā)熱等的檢測及切斷控制;
充電控制和作為剩余巡航里程大致標(biāo)準的電池剩余電量(充電狀態(tài):SOC=State of Charge)的推算。
鋰離子電池,充電超過完全充電電壓或放電超過終止電壓都有可能導(dǎo)致異常發(fā)熱等,因此準確理解SOC對于安全充放電管理也是必不可少的。
此外,BMS還具有以下功能作為選項:
電池平衡控制,通過調(diào)整電池單體的充電狀態(tài)使得電池組的容量最大化。
其中,(2)是BMS的基本功能之一,這里對此予以說明。
推算電池組充電狀態(tài)(SOC)的方法
在汽油動力車和柴油動力車上,可通過燃料箱中的浮子(float)高度來從物理上把握燃料水平,而在電動汽車上,無法從外部了解多少能量存儲在電池組中,因而必須使用專用的電路和算法來進行“推算”。
了解SOC大致上有兩種方法:
(a)測量電池單體電壓的方法;
(b)累計電池組輸入輸出電流的方法。
(a)測量電池單體電壓的方法
首先說明從電池電壓了解SOC的方法(圖1)。
用AD轉(zhuǎn)換器來讀取構(gòu)成電池組的各個電池單體兩端的電壓,賦予SOC的推算邏輯。此外,電池單體電壓會隨著溫度而變動,所以還要測量電池組的溫度,并賦予SOC推算邏輯。
但是,在成本和安裝方面準備與電池單體數(shù)量一樣多的AD轉(zhuǎn)換器會有較多的浪費,所以通常將多路復(fù)用器置于AD轉(zhuǎn)換器前段,在一定周期內(nèi)一邊掃描一邊進行測量。
測量電池單體電壓的AD轉(zhuǎn)換器不怎么要求高速性,但它要求數(shù)mV的精度,因此似乎經(jīng)常使用比較容易確保10位以上ENOB(有效位數(shù))的ΔΣ型。
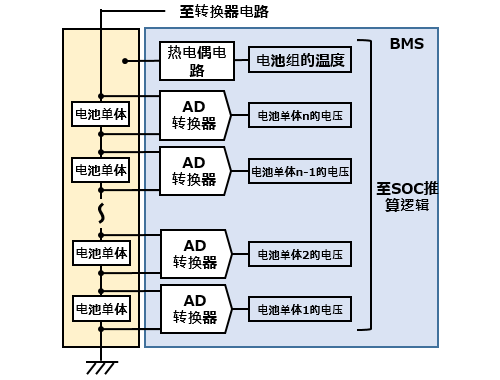
圖1.測量電池單體電壓的BMS的概念圖
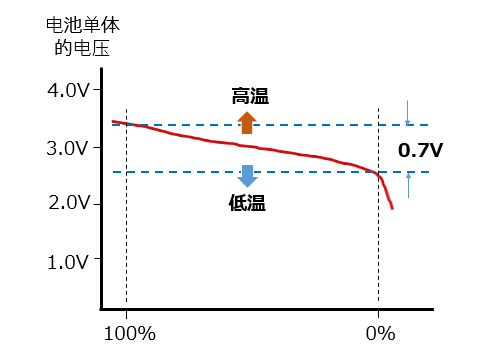
圖2. 鋰離子電池電芯電壓與SOC關(guān)系示意圖
作為一個示例,假設(shè)完全充電時的電壓為3.4V,終止電壓為2.7V,但這要取決于正極和負極中使用的材料(圖2)。
換句話說,假設(shè)3.4V時為100%,2.7V時為0%,只要根據(jù)電池單體電壓計算SOC就可以了。但是,要以1%的單位計算SOC,必須以0.7÷100=0.007V(7mV)的高精度測量電池單體電壓。實際上,電池單體電壓具有溫度系數(shù),在高溫時升高,在低溫時降低。特別是在行駛和充電(包括再生制動)過程中,溫度會隨流過的電流而變動,所以電壓也會有微妙的變動,不穩(wěn)定。雖然可以根據(jù)電池單體和電池組的溫度在一定程度上進行校正,但在不穩(wěn)定的狀況下很難保持較高的測量精度。找元器件現(xiàn)貨上唯樣商城
由于這些制約,在測量電池單體電壓求取SOC時,似乎經(jīng)常設(shè)定相應(yīng)的裕度(譬如,假設(shè)測量誤差為±10%,將實際的10%~90%作為0%~100%予以標(biāo)示等)。
(b)累計電池組輸入輸出電流的方法
(b)是一種對流入和流出電池單體的電流進行累計,并根據(jù)將會殘留在電池單體中的電荷(能量)求取SOC的方法(圖3)。
這種方法也被稱為庫侖計數(shù)法。譬如,如果電池組的容量是1000Ahr,并且測量出相當(dāng)于10.0Ahr的電荷流過時,則可求得SOC減少了1.00%。相反,在充入的電荷相當(dāng)于10.0Ahr時,可求得SOC增加了1.00%。
利用A/D轉(zhuǎn)換器將μΩ級的檢測電阻(匯流排等)的兩端電壓予以轉(zhuǎn)換并累計,而為了抑制誤差的累積,有效位數(shù)必須相應(yīng)地多,且必須在一定程度上提高采樣率以便捕獲變動。
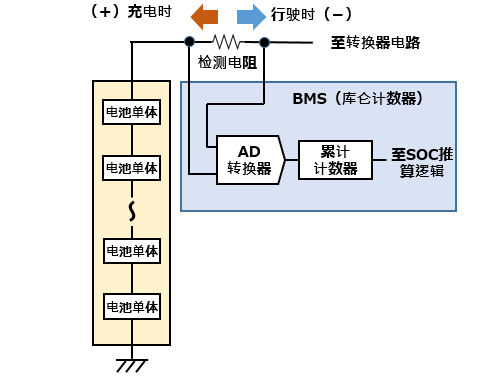
圖3.對流入和流出電池組的電流進行累計,求取SOC的庫侖計數(shù)器的模式圖
但是,前面描述的(a)和(b)的方法只是脫離實際的空論,實際上必須在考慮電池單體的經(jīng)時老化(SOH:State of Health)等因素的同時求取SOC。安裝因汽車廠家而不同,詳情不得而知,但SOC是在使用圖1和圖3所示的手法測得的電壓和電流等信息的同時,使用卡爾曼濾波器等數(shù)學(xué)手法進行推算的。
此外,作為BMS的基本作用而列出的“(1)過電壓、過電流、異常發(fā)熱等的檢測和切斷控制”基本上是通過擴展測量電池單體電壓和溫度的電路、及測量電池組流入和流出電流的電路來實現(xiàn)的。
通過平衡控制使得電池性能最大化
鋰離子電池在反復(fù)充放電過程中會逐漸老化。如果構(gòu)成電池組的所有電池單體都同樣老化,則不會有多大的問題,但實際情況是會出現(xiàn)偏差。
在電池組內(nèi),電池單體如圖1和圖3所示是串聯(lián)連接的,但在模式上如圖4所示考慮并聯(lián)連接電池單體的情形。
在電池單體的特性或性能因經(jīng)年變化等原因而出現(xiàn)偏差時,需要在剩余電量(SOC)最小的電池單體達到放電下限的時點停止放電(圖4左下)。換句話說,無法使用其他電池單體中紅色箭頭之間部分的能量。
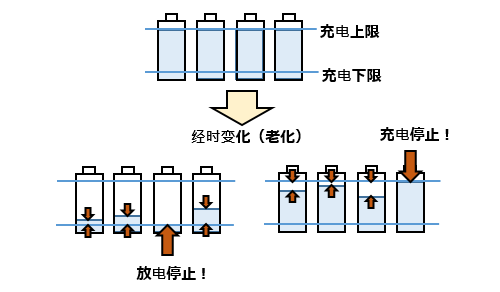
圖4.電池單體不平衡的模式圖
此外,充電中,需要在剩余電量最多的電池單體到達充電上限電壓時停止充電(圖4右下)。無法對其他電池單體中紅色箭頭之間的部分進行充電。
也即,有效容量將由于某些電池單體的速率出現(xiàn)偏差而減少。
用來抑制這種偏差的就是電池平衡。其手法包括無源平衡和有源平衡,無源平衡讓剩余電量多的電池單體與電阻負荷連接令其放電,并將各電池單體的SOC調(diào)整到放電下限,有源平衡將能量從高剩余電量多的電池單體分配給剩余電量少的電池單體。電路當(dāng)然是后者變得復(fù)雜。
繼續(xù)關(guān)注不斷進化的BMS
BMS的一部分在模式上如圖1和圖3所示,但實際上它更為復(fù)雜,需要很多組件。為了實現(xiàn)小型化,集成了這些功能的BMS IC和電路零部件已經(jīng)被各種電子零部件廠家推向了市場。
此外,包括SOC的推算在內(nèi),每天都在不斷開發(fā)新的控制方式。本次列出的傳統(tǒng)思維方式最終可能都會被歸類為“古典手法”。
就電池本身而言,新型正極材料和負極材料的研發(fā)正在進行中,能量密度有望進一步提高。
今后我們?nèi)詫⒗^續(xù)關(guān)注BMS的普及和進化。
下次,我們將介紹ADAS(先進駕駛輔助系統(tǒng))和作為自動駕駛關(guān)鍵部分的AI處理器。
迎來“CASE”時代的汽車趨勢和技術(shù)課題(2)~電池管理系統(tǒng)~ - 松下電器機電(中國)有限公司 官方網(wǎng)站 (panasonic.cn)
審核編輯 黃宇
-
電池管理系統(tǒng)
+關(guān)注
關(guān)注
41文章
529瀏覽量
33667 -
bms
+關(guān)注
關(guān)注
107文章
1039瀏覽量
66807 -
Case
+關(guān)注
關(guān)注
0文章
28瀏覽量
13445 -
電池
+關(guān)注
關(guān)注
84文章
10772瀏覽量
132287 -
汽車
+關(guān)注
關(guān)注
13文章
3693瀏覽量
37958
發(fā)布評論請先 登錄
相關(guān)推薦
迎來“CASE”時代的汽車趨勢和技術(shù)課題(3) ~自動駕駛和識別引擎~
硅技術(shù)引領(lǐng)汽車設(shè)計時代
電池管理系統(tǒng)技術(shù)解讀-電池與用戶之間的紐帶
消費電子電池管理系統(tǒng)技術(shù)論壇 分享極致續(xù)航新方案
【GoKit申請】電動汽車電池管理系統(tǒng)開發(fā)
【W(wǎng)RTnode2R申請】電動汽車電池管理系統(tǒng)開發(fā)
汽車電池管理系統(tǒng)的應(yīng)用和供電說明
電池管理集成電路對汽車性能影響
電源管理技術(shù)的三大創(chuàng)新發(fā)展趨勢
數(shù)字電子技術(shù)課程設(shè)計指導(dǎo)書
電池管理系統(tǒng)的趨勢、課題和對策
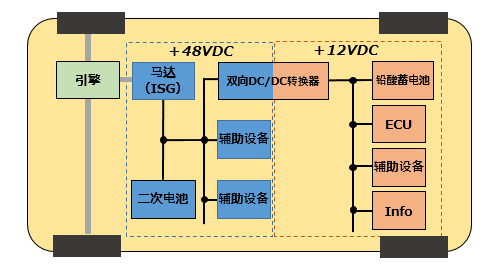
迎來“CASE”時代的汽車趨勢和技術(shù)課題(1) ~48V系統(tǒng)輕度混合動力車~





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論