 嵌入式DSP C2000 電機電力控制專業實驗室解決方案
嵌入式DSP C2000 電機電力控制專業實驗室解決方案
實驗箱基于TI TMS320F28335浮點DSP C28x控制器,主頻150MHz,實驗箱采用一體板結構,含實驗板和DSP仿真器,可配置電機配件箱,包含步進電機、直流無刷電機(含電機驅動器)和永磁同步電機(含電機驅動器)。
實驗箱適用于測控、自動化、工業控制、電力控制和電機控制等教學領域。
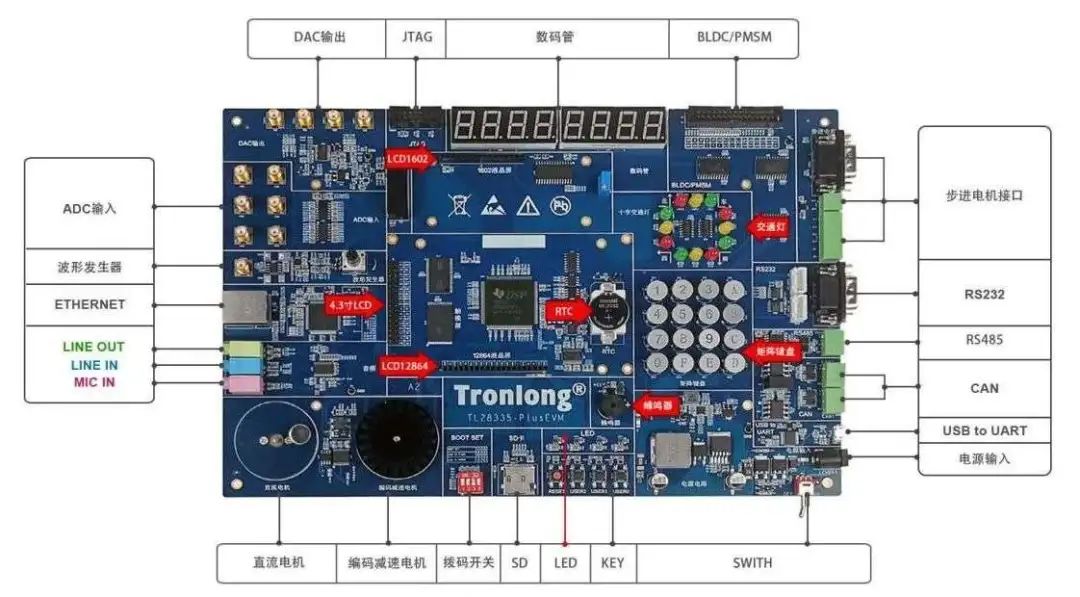
實驗箱板載固定仿真器,金屬材質,免驅動安裝,支持防反插功能,實驗底板上板載波形發生器,采用AD9833芯片,可輸出三種波形:正弦波、方波、三角波,可通過旋鈕控制輸出范圍為0~4.5V。實驗板上支持安裝可拆卸亞克力保護板,保護實驗電路。

實驗箱支持:CAN、RTC、以太網口、音頻輸入輸出接口、AD、DA、RS232、RS485、LCD、蜂鳴器、直流有刷電機、減速電機、4*4 矩陣鍵盤、數碼管、十字交通燈等外設與接口。
實驗箱可配置電機配件箱,包含步進電機、直流無刷電機(含電機驅動器)和永磁同步電機(含電機驅動器)。



步進電機(可選)參數
相數 | 2 |
步距角 | 1.8° |
絕緣等級 | B |
額定電流 | 5A |
相電阻 | 0.39Ω |
相電感 | 1.7Mh |
靜力矩 | 2N.m |
轉子慣量 | 480g.平方厘米 |

相數 | 3 |
額定電壓 | 24 VDC |
額定轉矩 | 0.38N.m |
額定電流 | 5.9A |
空載電流 | 0.8A |
額定功率 | 100W |
額定轉速 | 2500rpm |
空載轉速 | 3500rpm |
級對數 | 8 |

PMSM永磁同步電機(可選)參數
相數 | 3 |
電壓 | 24 VDC |
額定功率 | 62W |
額定轉矩 | 0.2N.m |
額定電流 | 4.0A |
額定轉速 | 3000rpm |
磁極 | 8 |
電阻 | 1.02Ω±10% |
電感 | 0.59mH±20% |
丨?
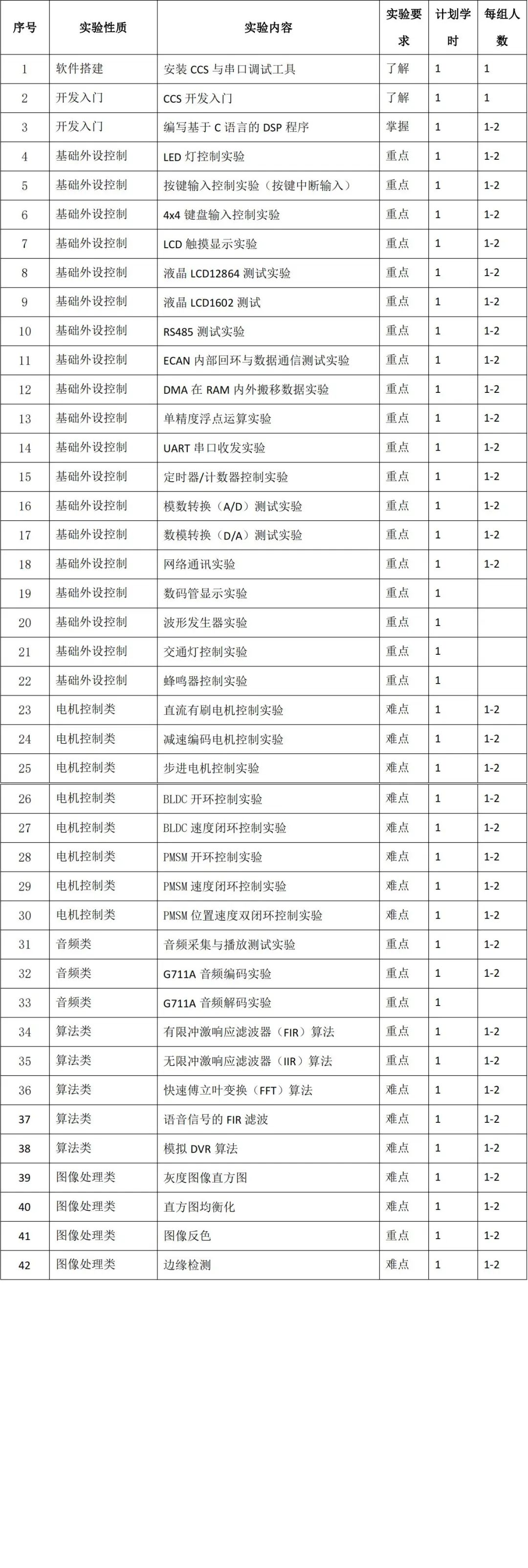
實驗內容豐富,滿足多場景教學需求
創龍教儀提供豐富的教學實驗案例,讓學生更全面地了解 DSP 電力控制、電機控制相關知識與應用,實驗類別如下表:
第一章 | DSP實驗環境搭建與CCS開發基礎 |
第二章 | DSP基礎外設實驗 |
第三章 | 電機控制類實驗 |
第四章 | 語音類實驗 |
第五章 | DSP算法實驗 |
第六章 | 圖像類實驗 |
丨?
保姆式實驗操作教程,減少老師備課時間
創龍教儀提供保姆式實驗操作教程,提供教學實驗手冊、教學實驗視頻,在明確重點知識的前提下,指導學生一步步操作,幫助快速打好專業基礎,同時大大減少老師們的備課時間,減輕老師們的負擔。手冊內容如下表:
實驗目的 | 幫助學生理解實驗重點并掌握知識點運用。 |
實驗原理 | 包含模塊原理圖、源碼解析、現象原理等,幫助學生理解實驗現象的實現方式。 |
實驗設備 | 介紹實驗所需的硬件設備、軟件設備等,讓學生提前做好實驗準備,節約時間成本。 |
實驗步驟 | 詳細介紹實驗操作步驟,包含源碼編譯、硬件連接、軟件操作等,幫助學生快速上手。 |

向下滑動查看所有內容
這是一條分割線
丨?
案例分享:3-2 減速編碼電機控制實驗
一、實驗目的:
(1)理解PID控制原理。
(2)學習增量式PID算法的原理。
(3)掌握PID閉環控制電機的實現。
二、實驗原理:
模擬PID控制原理
在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制器(亦稱PID調節器)是應用最為廣泛的一種自動控制器。PID控制器原理簡單,易于實現,適用面廣,控制參數相互獨立,參數的選定比較簡單。
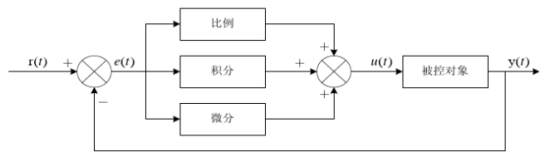
模擬PID控制系統的常規原理框圖如下圖所示。系統由模擬PID控制器和被控對象組成,r(t)是給定值,y(t)是系統的實際輸出值,給定值與實際輸出值構成控制偏差e(t)。
e(t)=r(t)-y(t)
控制偏差e(t)是PID控制的輸入,u(t)是PID控制器的輸出和被控對象的輸入。模擬PID控制器的控制規律為

控制器的輸出與輸入誤差信號成比例,當僅有比例控制時系統輸出存在穩態誤差。在模擬PID控制器中,比例控制的作用是對偏差瞬間做出反應。偏差產生后控制器立刻起控制作用,使偏差變小。比例系數Kp決定了控制作用的強弱,Kp越大,控制作用越強,過度越快,偏差也就越小。但是Kp越大,也更加容易產生振蕩,破壞系統的穩定性。因此,比例系數Kp必須選擇適當,才能使過渡時間變小,偏差小又穩定。
增量式PID算法
數字式PID控制算法可以分為位置式PID和增量式PID控制算法。在本實驗中使用的增量式PID算法。增量式PID控制算法只需要計算控制量的增量。

可得控制器在第k-1個采樣時刻的輸出值為:
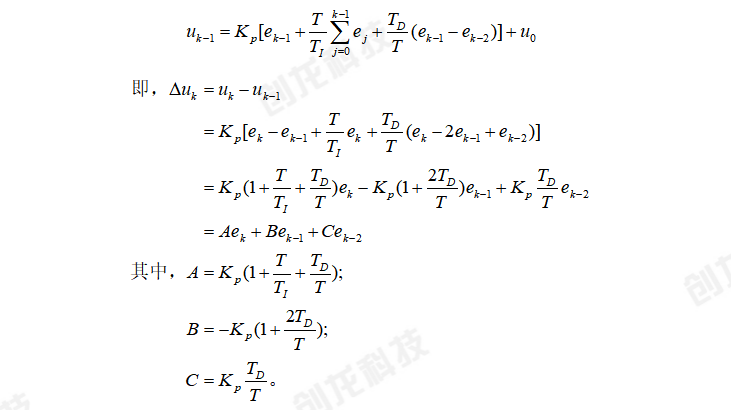
如果采用恒定的采樣周期T,一旦確定了A、B、C,只要使用前后3次測量值的偏差,就可以求出控制增量。
除此之外,還有另一種算法:
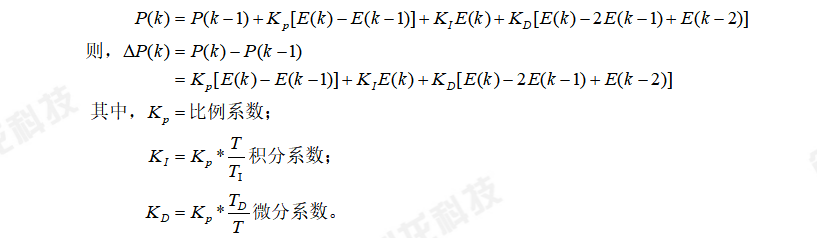
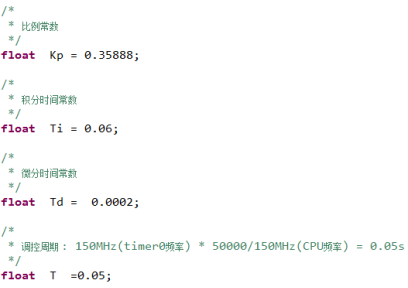
PID算法程序解析
打開光盤資料的"Demo\KingBox\Application\DC_GEAR_MOT\main.c"文件,可查看相關代碼。比例常數、積分時間常數、微分時間常數和調控周期如下:
主函數中首先初始化系統控制,配置CPU主頻、寄存器和初始化PIE控制等。調用InitMeasureSpeed函數初始化時鐘、中斷等。InitMeasureSpeed函數如下:
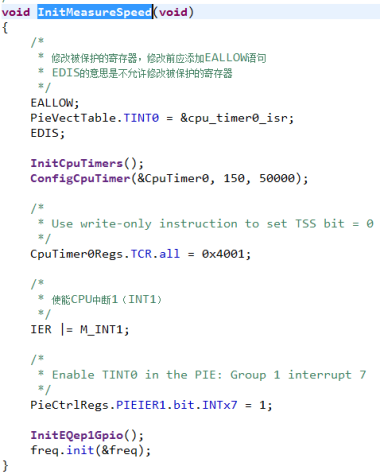
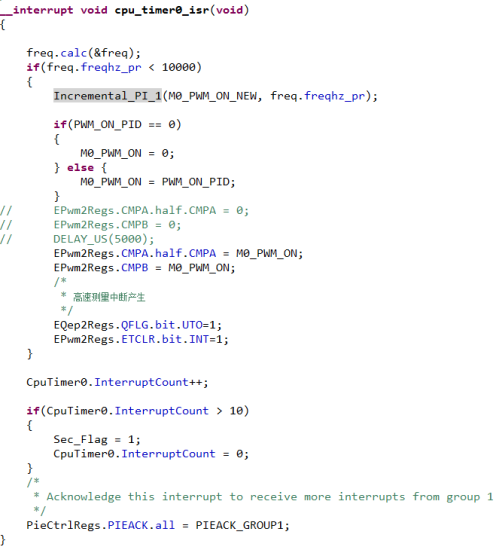
InitMeasureSpeed函數中,cpu_timer0_isr定時器中斷函數中定時采集速度,并用于PID算法。freq.freqhz_pr為采集的電機脈沖數,M0_PWM_ON為高電平時間,M0_PWM_ON_NEW為新的高電平時間,PWM_ON_PID是經過PID算法后的高電平時間。cpu_timer0_isr定時器中斷函數如下:
三、實驗步驟
(1)對實驗設備進行硬件部分連接,連接好仿真器和USB串口線(默認為USB to UART串口輸出)并上電。
(2)右擊計算機圖標,點擊“設備管理器->通用串行總線控制器”或者“設備->端口(COM和LPT)”,查看是否有對應的仿真器的選項出現,如有說明仿真器驅動已經正常安裝,否則請先正確安裝CCS。同時查看串口的端口號。
(3)打開串口軟件并設置串口調試工具,波特率為115200。
(4)按照工程導入步驟導入光盤資料"Demo\KingBox\Application"路徑下的DC_DEAR_MOT工程。
(5)編譯工程生成DC_DEAR_MOT.out的可執行程序。
(6)實驗箱上電,確認仿真文件(.ccxml 文件)配置,并連接CPU。
(7)加載DC_DEAR_MOT.out可執行程序,并運行程序,本實驗的功能是實現PID閉環控制電機。
四、實驗現象
運行程序之后,串口顯示如下圖所示:
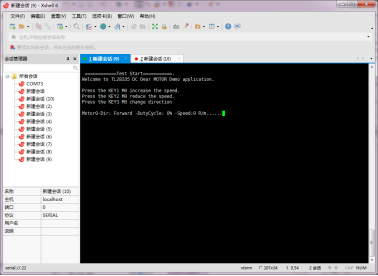
同時,數碼管顯示電機的轉速和轉向(0是轉速,F代表順時針轉),如下:

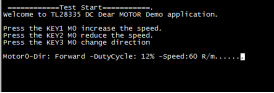
第一次按下按鍵1后,減速直流電機開始順時針(Forward)轉動,占空比(DutyCycle)約為12%,轉速(Speed)約為60R/min,顯示如下圖所示:
按下按鍵3后,電機會停止轉動,同時串口打印電機轉向為逆時針(Backward),電機轉向由順時針改為逆時針,如下:
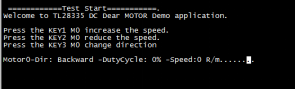

-
dsp
+關注
關注
554文章
8059瀏覽量
349761 -
嵌入式
+關注
關注
5089文章
19169瀏覽量
306778 -
電力控制
+關注
關注
0文章
23瀏覽量
7709
發布評論請先 登錄
相關推薦
飛凌嵌入式作為首個嵌入式板卡合作伙伴入駐「恩智浦云實驗室」

C2000 F28004x系列MCU PLL鎖相失敗問題解決方案

使用C2000 MCU的數字控制無橋式功率因數校正(BL PFC)
在單個C2000?MCU上使用FCL和SFRA進行雙軸電機控制
芯源半導體首個CW32嵌入式創新實驗室揭牌
DSP C6000 數字圖像、信號處理專業實驗室解決方案

見證實力 | 走進飛凌嵌入式研發實驗室


針對 C2000? 微控制器的集成微控制器 (MCU) 電源解決方案數據表





 工商網監
工商網監
評論