") 控制工程基礎(chǔ)案例6
控制工程基礎(chǔ)案例6
對(duì)于一個(gè)復(fù)雜控制系統(tǒng),當(dāng)局部環(huán)節(jié)震蕩時(shí),可以在局部震蕩環(huán)節(jié)添加局部反饋,改善系統(tǒng)的震蕩及輸出特性。
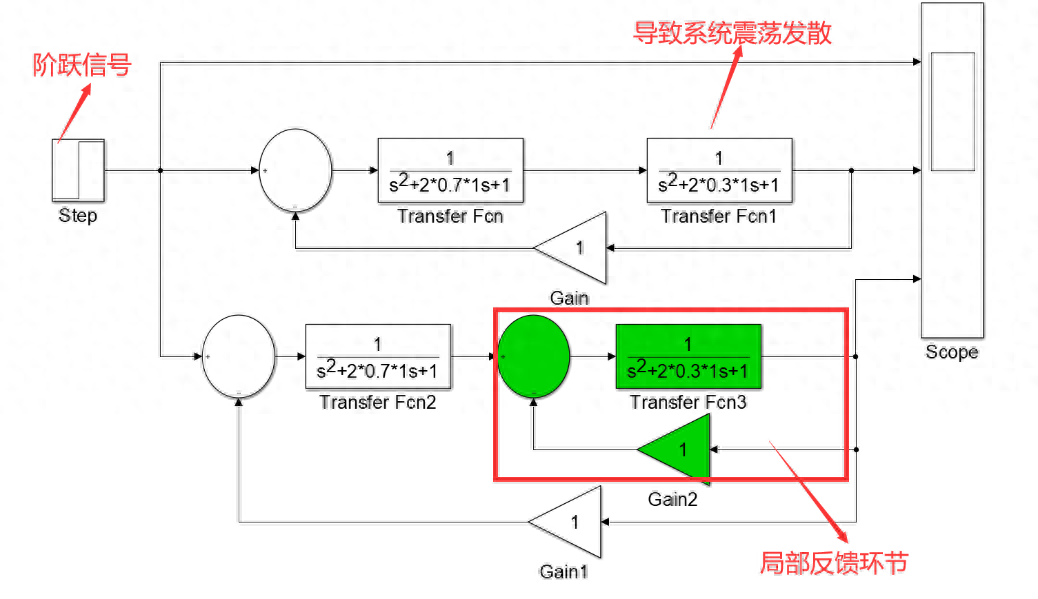
圖1 局部反饋系統(tǒng)(階躍信號(hào)輸入) 元件現(xiàn)貨上唯樣
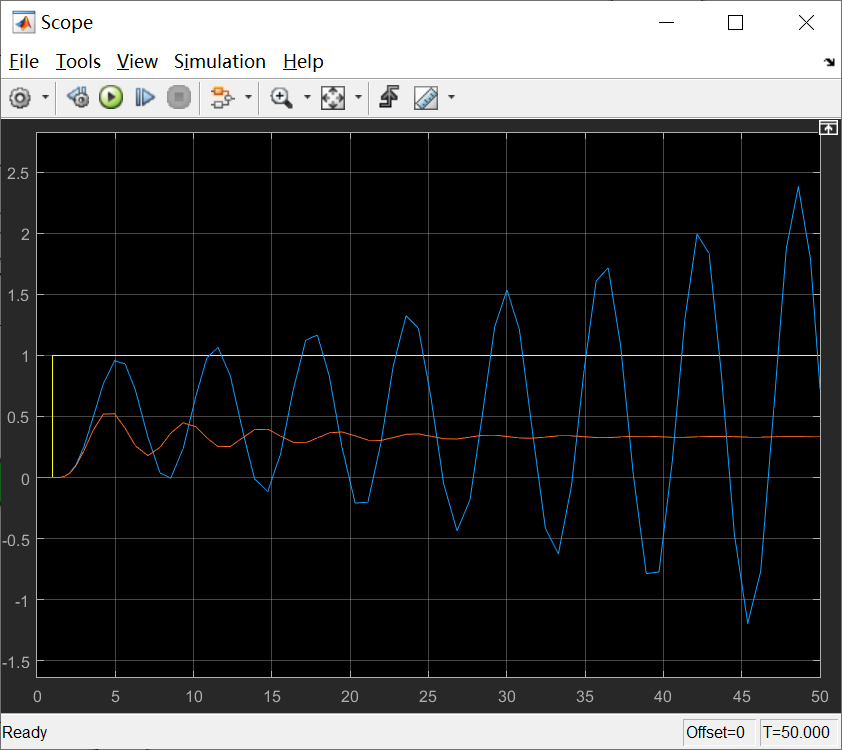
圖2 局部反饋系統(tǒng)輸出(階躍信號(hào)輸入)
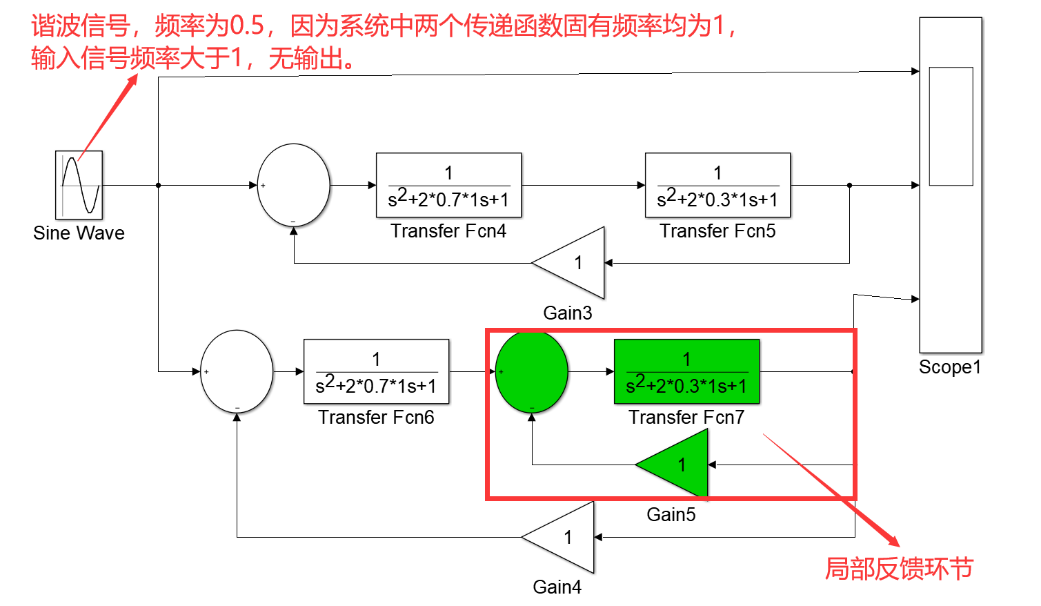
圖3 局部反饋系統(tǒng)(諧波信號(hào)輸入,頻率需小于1赫茲)
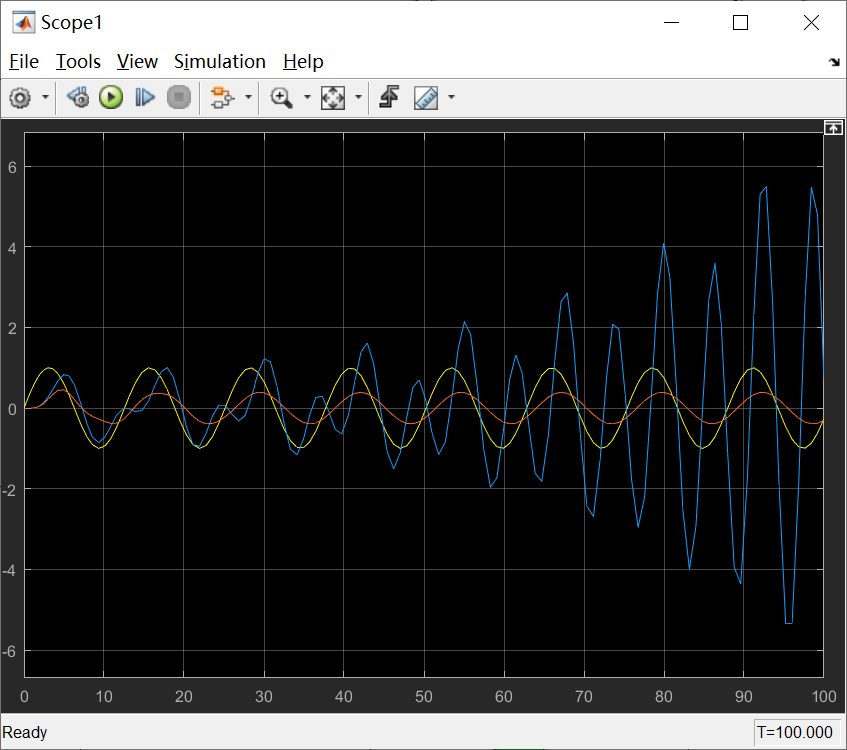
圖4 局部反饋系統(tǒng)輸出(諧波信號(hào)輸入,頻率需小于1赫茲)
審核編輯 黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
控制工程
+關(guān)注
關(guān)注
0文章
12瀏覽量
8809
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Simulink滑模控制原理概述
隨著系統(tǒng)功能的日益復(fù)雜,以自適應(yīng)控制為代表的先進(jìn)控制理論與算法越來(lái)越多地被投入到工程應(yīng)用當(dāng)中。而隨著大家對(duì)被控物理系統(tǒng)特性本身和控制理論更加深入的研究,像魯棒

想成為年薪百萬(wàn)的電機(jī)控制工程師,這幾個(gè)問(wèn)題你不得不會(huì)!
對(duì)于電機(jī)控制這個(gè)行業(yè),以前以屬于冷板凳。這幾年因?yàn)殡妱?dòng)汽車、機(jī)器人的大火,電機(jī)控制工程師也開(kāi)始火起來(lái)了,網(wǎng)上有說(shuō)薪資百萬(wàn)的,有說(shuō)這個(gè)技術(shù)特別難,有說(shuō)自己只有幾千薪資的…… 大家多多少少內(nèi)心都有很多

現(xiàn)代控制理論和自動(dòng)控制原理的區(qū)別
現(xiàn)代控制理論和自動(dòng)控制原理是控制工程領(lǐng)域的兩個(gè)重要概念,它們?cè)诤芏喾矫嬗邢嗨浦帲泊嬖谝恍╆P(guān)鍵的區(qū)別。 一、定義 自動(dòng)控制原理 自動(dòng)控制
使用STMF030C6T6開(kāi)發(fā)板做的工程,能否用到使用L031F6P6做的產(chǎn)品上?
使用STMF030C6T6開(kāi)發(fā)板做的工程,能否用到使用L031F6P6做的產(chǎn)品上?就是用CUBEMAX生成的STMF030C6T6工程,在L
發(fā)表于 05-24 07:19
創(chuàng)建自己stm32電機(jī)控制工程,需要將MC_library的target配置device成stm32F103RB嗎?
根據(jù)stm32 PMSM FOC4.3版本定制自己的電機(jī)控制工程,MCU是stm32F103RB ,在編譯工程時(shí),需要將MC_library的target配置device成stm32F103RB嗎?如附圖,如果需要,為什么修改完以后會(huì)編譯報(bào)錯(cuò),而且很多錯(cuò)誤
發(fā)表于 04-29 07:32
Matlab R2016b創(chuàng)建STM32H743ZIT6控制工程當(dāng)從Simulink庫(kù)中拖入TIMx模塊出現(xiàn)報(bào)錯(cuò)的原因?
Matlab R2016b創(chuàng)建STM32H743ZIT6控制工程當(dāng)從Simulink庫(kù)中拖入GPIO和ADC模塊到模型中時(shí)都沒(méi)有問(wèn)題
但是拖入TIMx模塊出現(xiàn)提下列提示,并且反復(fù)蹦出,無(wú)法繼續(xù)進(jìn)行
發(fā)表于 04-25 07:00
控制工程基礎(chǔ)案例4
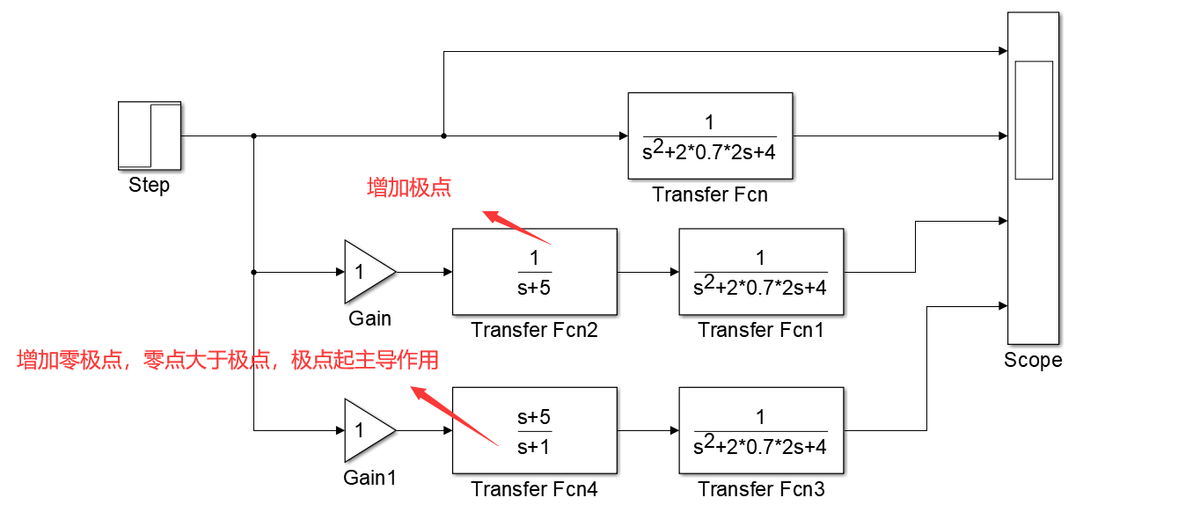
對(duì)于傳遞函數(shù),增加零極點(diǎn)會(huì)改變傳遞函數(shù)的特性,Simulink模型練習(xí)如下:? 圖1 階躍信號(hào)作用系統(tǒng)? 圖2 階躍信號(hào)作用系統(tǒng)輸出? 圖3 諧波信號(hào)作用系統(tǒng)? 圖4 諧波信號(hào)作用系統(tǒng)輸出 ? ? ? 審核編輯 黃宇
控制工程基礎(chǔ)案例5
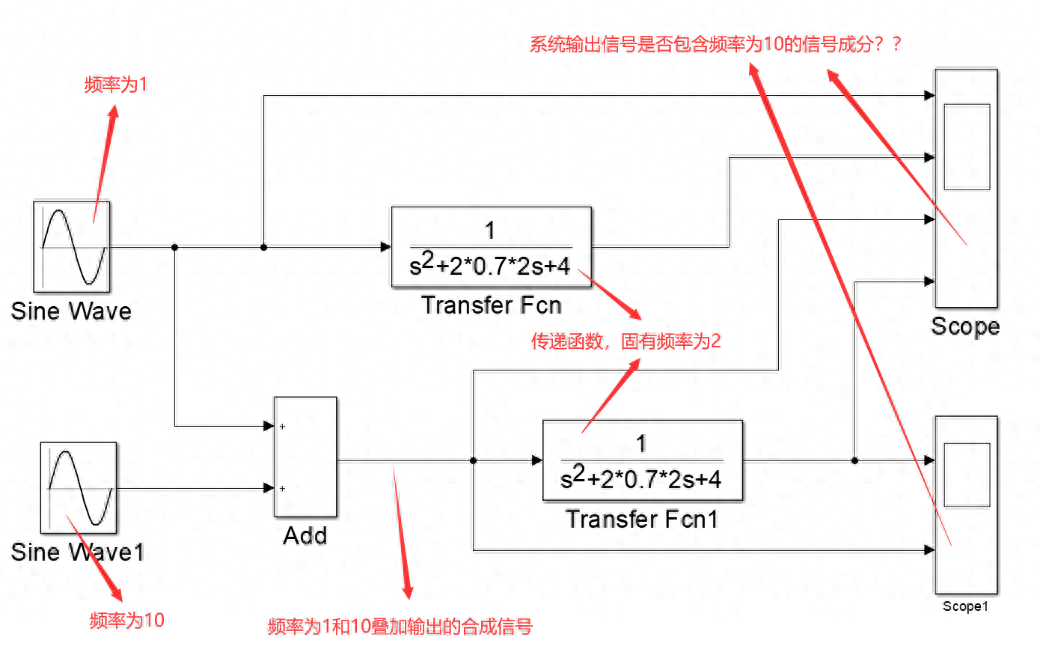
對(duì)于一個(gè)二階系統(tǒng),當(dāng)輸入信號(hào)的頻率大于固有頻率時(shí),此時(shí)系統(tǒng)的輸出不包含高頻信號(hào),系統(tǒng)相當(dāng)于低通濾波器。 圖1 系統(tǒng)模型 圖2 系統(tǒng)輸出信號(hào)對(duì)比(全部信號(hào)顯示) 圖2 系統(tǒng)輸出信號(hào)對(duì)比(部分信號(hào)顯示) 圖3 系統(tǒng)輸出信號(hào)對(duì)比(部分信號(hào)顯示,局部放大) 審核編輯 黃宇
控制工程基礎(chǔ)案例7
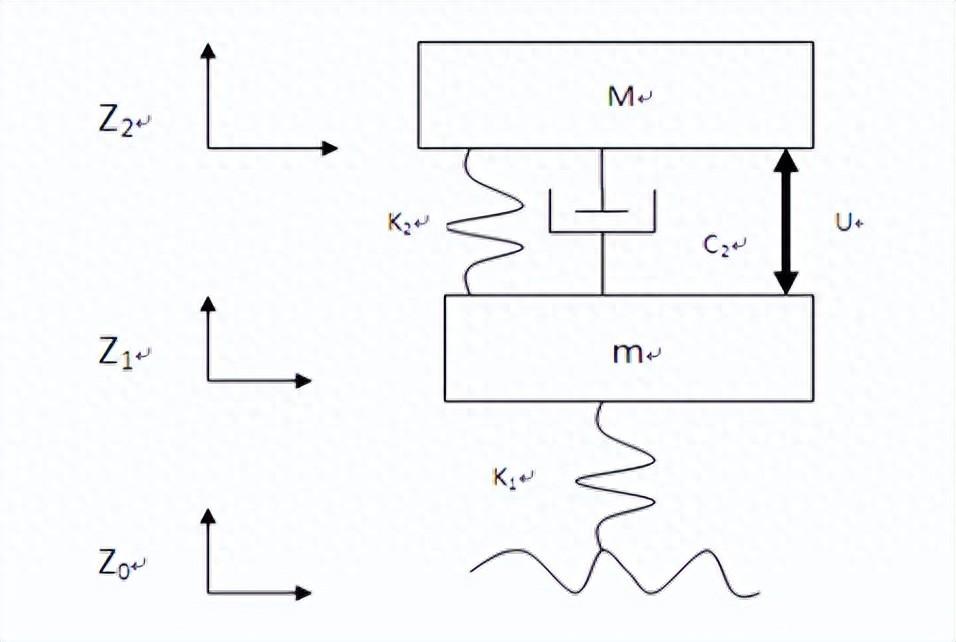
車或者四分之一主動(dòng)懸架模型可以簡(jiǎn)化成如圖1所示的彈簧質(zhì)量系統(tǒng),圖中U為主動(dòng)控制力,當(dāng)U=0時(shí),模型轉(zhuǎn)換為被動(dòng)懸架模型;圖中:M為車身質(zhì)量,即簧載質(zhì)量;m為懸架與車輪質(zhì)量,即非簧載質(zhì)量;K2、C2
如何建立STM32F400CBT6工程?
你好,請(qǐng)問(wèn)如何建立STM32F400CBT6工程,我再mdk 里面找不到對(duì)應(yīng)芯片型號(hào)。
包括在stm32cubeMx里面也沒(méi)有。
望指導(dǎo),或提供個(gè)led工程模板。
不勝感謝。
發(fā)表于 03-28 07:35
CS32F030C8T6工程移植問(wèn)題
*附件:V1.0 CS32F030C8T6 2024.03.12.zip
目前想把CS32F030的工程移植一下,遇到編譯啟動(dòng)文件報(bào)錯(cuò)的問(wèn)題,不知哪位大佬幫忙看一下是哪里的問(wèn)題,感謝處理,謝謝!
發(fā)表于 03-12 22:54
國(guó)產(chǎn)自主可控工程機(jī)械控制器
隨著科技的飛速發(fā)展,工程機(jī)械控制器在工程中的作用日益凸顯。而今,碩博電子的工程機(jī)械控制器已成為眾多頭部企業(yè)的信賴之選。這背后,究竟隱藏著哪些

數(shù)控伺服系統(tǒng)的ADAMS/MATLA聯(lián)合仿真研究
利用伺服進(jìn)給系統(tǒng)虛擬[1]樣機(jī)提供的集成環(huán)境對(duì)機(jī)械系統(tǒng)和電機(jī)控制系統(tǒng)進(jìn)行聯(lián)合仿真[2]分析,是一種全新的設(shè)計(jì)方法。在傳統(tǒng)的復(fù)雜機(jī)械系統(tǒng)[3]設(shè)計(jì)過(guò)程中,機(jī)械工程師和控制工程師雖然在共同設(shè)計(jì)開(kāi)發(fā)一個(gè)系統(tǒng)
發(fā)表于 01-19 14:48
?669次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論