") 愛普生M-G365/M-G366 MEMS六軸陀螺儀替代光纖陀螺儀
愛普生M-G365/M-G366 MEMS六軸陀螺儀替代光纖陀螺儀
愛普生M-G365/M-G366是一款性能達(dá)到光纖陀儀(FOG)級(jí)別的高性能性測量裝置,作為新一代IMU標(biāo)準(zhǔn),安裝簡單,具有新的姿態(tài)角輸出功能并支持各種應(yīng)用,并且具有擴(kuò)展卡爾曼濾波器的高速DSP能以較低功耗提供高精度實(shí)時(shí)姿態(tài)角輸出(橫滾角/俯仰角/偏航角),可廣泛適用于汽車等車輛、船只及其他多種工業(yè)產(chǎn)品和系統(tǒng)。用來測量數(shù)據(jù)和控制運(yùn)動(dòng)等,而且系統(tǒng)端不再需要?jiǎng)討B(tài)姿態(tài)角的高速計(jì)算,從而減小了系統(tǒng)載荷和功耗。M-G365采用了最新開發(fā)的高性能傳感器,具有穩(wěn)定性更好、噪音更低、動(dòng)態(tài)范圍更廣的優(yōu)越特點(diǎn),而且動(dòng)態(tài)性能出色(比例因子非線性),非常適合諸如汽車、無人飛機(jī)等從靜態(tài)到高速運(yùn)動(dòng)的高精度測量。M-G365的向后兼容性,更是大大降低了用戶開發(fā)成本和評(píng)價(jià)時(shí)間,更有較低的電流消耗(16 mA,而M-G364和M-G354為18 mA)

評(píng)估測試環(huán)境搭建:
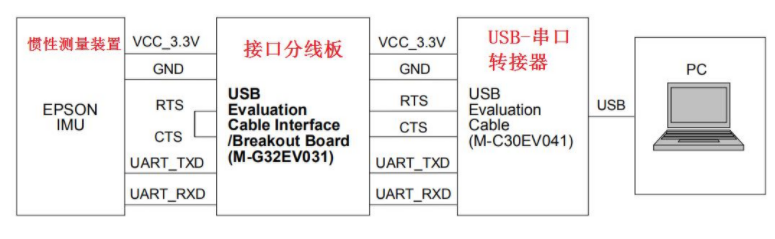
圖1 環(huán)境搭建框圖
上述這款接口分線板用來將愛普生M-G365六軸MEMS陀螺儀(慣性測量裝置)1mm pitch的連接器轉(zhuǎn)接到2.54mm pitch的連接器上,配合USB-串口轉(zhuǎn)接器,使得PC能夠控制慣性測量裝置,大大簡化了產(chǎn)品的測試評(píng)估。
六軸陀螺儀術(shù)語說明:
*1 慣性測量裝置(IMU)是用于感應(yīng)慣性運(yùn)動(dòng)的設(shè)備。它有三軸角速度傳感器和三軸加速度計(jì)組成。也被稱為六軸陀螺儀,屬于MEMS陀螺儀。
*2 光纖陀螺儀(FOG)是一種在少量高性能IMU中使用的、基于光纖和光干涉特性的陀螺傳感器。
*3 陀螺傳感器(角速度傳感器)測量單位時(shí)間上某物體關(guān)于參考軸的旋轉(zhuǎn)角度(角速度)。
*4 零偏穩(wěn)定性是一個(gè)衡量規(guī)定取樣時(shí)間和平均時(shí)間間隔上計(jì)算的陀螺儀零偏隨機(jī)變化的指標(biāo),該零偏變化用1/f噪聲密度表示。
*5 角隨機(jī)游走是一個(gè)衡量規(guī)定取樣時(shí)間和平均時(shí)間間隔上計(jì)算的陀螺儀零偏隨機(jī)變化的指標(biāo),該零偏變化用隨機(jī)噪聲密度表示。
*6 擴(kuò)展卡爾曼濾波器利用模型估值和實(shí)際觀察值依次計(jì)算最可能值,以便更準(zhǔn)確地預(yù)測觀察值中的信息,包括濾波器誤差。
*7 數(shù)字信號(hào)處理器(DSP)是處理數(shù)字信號(hào)的高速運(yùn)算電路。
*8 方位角(橫滾角、俯仰角和偏航角):
? 橫滾角:物體沿其縱軸旋轉(zhuǎn)的角度
? 俯仰角:物體沿其橫軸旋轉(zhuǎn)的角度
? 偏航角:物體沿其垂直軸旋轉(zhuǎn)的角度
光纖陀螺儀(FOG)以前曾經(jīng)是環(huán)形激光陀螺儀(RLG)等其他技術(shù)的低成本替代品,現(xiàn)在該技術(shù)面臨自愛普生高精度六軸陀螺儀新的競爭。微機(jī)電系統(tǒng)(MEMS)陀螺儀開始搶奪傳統(tǒng)FOG應(yīng)用的市場份額。具體來說,天線陣列穩(wěn)定、農(nóng)業(yè)機(jī)械控制、常規(guī)車輛導(dǎo)航成為MEMS和FOG對峙的戰(zhàn)場。
愛普生MEM六軸陀螺儀與FOG光纖陀螺儀相比從性能參數(shù)看非常接近,特別是EPSON最新推出的M-G365等系列參數(shù)已經(jīng)達(dá)到了FOG戰(zhàn)術(shù)級(jí)性能水平,但其成本卻比MEMS低出數(shù)倍。如果可以使用GNSS,而且應(yīng)用的目的是在開放天空環(huán)境中運(yùn)行,MEMS六軸陀螺儀可以取代OG光線陀螺儀。如果應(yīng)用能夠接收車輛或平臺(tái)速度更新,則愛普生MEMS六軸陀螺儀系統(tǒng)可以達(dá)到與獨(dú)立FOG系統(tǒng)相同的水平。這將迅速加速六軸陀螺儀在自動(dòng)駕駛汽車等領(lǐng)域的推廣應(yīng)用。
對于普通車輛導(dǎo)航,這一點(diǎn)還不會(huì)產(chǎn)生影響,但此系統(tǒng)是針對需要適應(yīng)高速率控制的應(yīng)用設(shè)計(jì)的。此外還有幾種MEMS陀螺儀提供良好的偏置穩(wěn)定度,但帶寬降低或噪聲很高。為本系統(tǒng)選擇的MEMS陀螺儀在帶寬和性能之間達(dá)到了平衡。上表給出了所選MEMS的實(shí)際規(guī)格。
M-G365六軸陀螺儀使用的MEMS陀螺儀采用多核架構(gòu),該架構(gòu)在穩(wěn)定度、噪聲、線性度和線性g性能之間達(dá)到了優(yōu)化平衡。完全差分四諧振器與片內(nèi)高性能信號(hào)調(diào)理密切配合,從而使得諧振器的必需響應(yīng)范圍最小,位于高度線性區(qū),并且提供高度的振動(dòng)抑制。
由于MEMS陀螺儀和加速度計(jì)集成到多軸IMU中(請參見圖1),傳感器的x/y/z正交性可能成為主要誤差源。主要誤差源往往由跨軸靈敏度或?qū)?zhǔn)誤差指定。常見規(guī)格是±2%跨軸靈敏度。本系統(tǒng)的IMU具有0.087%的跨軸靈敏度(0.05°正交性)。更重要的是,由于器件特定的校準(zhǔn)在出廠前完成,此規(guī)格在溫度范圍內(nèi)有效。
-
陀螺儀
+關(guān)注
關(guān)注
44文章
791瀏覽量
98888 -
愛普生
+關(guān)注
關(guān)注
0文章
333瀏覽量
22197 -
測量
+關(guān)注
關(guān)注
10文章
4937瀏覽量
111683
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
愛普生M-G365PDC1/M-G365PDF1六軸陀螺儀

愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹

愛普生(EPSON)陀螺儀傳感器的特點(diǎn)和應(yīng)用領(lǐng)域介紹
愛普生開發(fā)出全新X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

高速率控制應(yīng)用下的汽車導(dǎo)航——M-G365/M-G366

陀螺儀x軸和y軸的應(yīng)用
陀螺儀傳感器,IMU和加速度計(jì)的產(chǎn)品和選型
解析愛普生(EPSON)陀螺儀傳感器XV-3510CB

愛普生M-G370和M-G365——小型高精度定位裝置的集大成者
EPSON X2A0002710002 XV7011BB陀螺儀傳感器的特征和用途
EPSON的GGPM6083STD陀螺儀傳感器(壓電俠)
一文探秘MEMS陀螺儀工作原理與特性

MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論