") arm中斷是怎么實現(xiàn)的
arm中斷是怎么實現(xiàn)的
ARM中斷的實現(xiàn)是通過中斷控制器和異常模式實現(xiàn)的。ARM處理器通過中斷控制器來接收和處理外部的中斷信號,而異常模式用于處理內(nèi)部的異常事件。本文將詳細介紹ARM中斷的原理和實現(xiàn)方式。
一、ARM中斷的分類
ARM中斷可以分為兩類:外部中斷和內(nèi)部異常。外部中斷是指來自外部設(shè)備(如外部中斷請求線或外設(shè))的中斷信號,而內(nèi)部異常則是處理器內(nèi)部出現(xiàn)的異常事件。
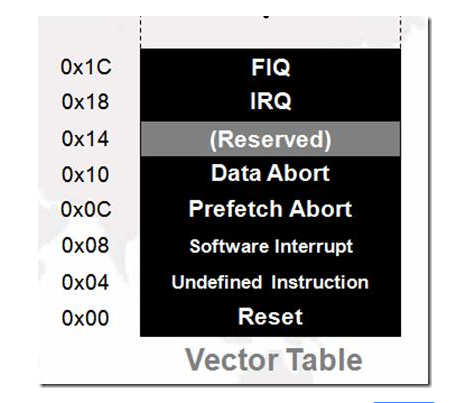
- 外部中斷:ARM處理器通過外部中斷引腳(如IRQ和FIQ)接收外設(shè)發(fā)送的中斷請求信號。當(dāng)外設(shè)發(fā)出中斷請求信號時,處理器會暫停當(dāng)前任務(wù),轉(zhuǎn)入中斷處理程序的執(zhí)行。
- 內(nèi)部異常:內(nèi)存訪問錯誤、指令執(zhí)行錯誤、數(shù)據(jù)傳輸錯誤等都屬于內(nèi)部異常。當(dāng)處理器檢測到這些異常事件發(fā)生時,會中斷當(dāng)前任務(wù)的執(zhí)行,進入異常處理程序。
二、中斷控制器
中斷控制器是一個硬件模塊,負(fù)責(zé)接收、分發(fā)和處理中斷請求。ARM處理器一般都搭載了一個或多個中斷控制器,如GIC(Generic Interrupt Controller)。
- 中斷請求的接收:中斷控制器通過外部中斷引腳(如IRQ和FIQ)接收外設(shè)發(fā)送的中斷請求信號。這些引腳通過外部電平或電壓的變化來傳遞中斷請求信號給中斷控制器。
- 中斷信號的分發(fā):中斷控制器將接收到的中斷信號進行優(yōu)先級排序,并選出優(yōu)先級最高的中斷信號,將其傳遞給處理器的中斷請求引腳。處理器通過檢查中斷請求引腳的狀態(tài)來判斷是否有中斷請求。
- 中斷處理程序的調(diào)度:一旦中斷請求引腳有信號變化,處理器就會中斷當(dāng)前任務(wù)的執(zhí)行,并轉(zhuǎn)入中斷處理程序。
三、異常模式
ARM處理器通過異常模式來處理內(nèi)部異常事件。
- 異常的觸發(fā):當(dāng)處理器檢測到某個內(nèi)部異常事件發(fā)生時,例如除法錯誤、未定義指令、非法指令、數(shù)據(jù)傳輸錯誤等,會立即進入異常模式。
- 異常處理程序:異常模式下,處理器會跳轉(zhuǎn)至相應(yīng)的異常處理程序,例如數(shù)據(jù)傳輸錯誤會跳轉(zhuǎn)至數(shù)據(jù)終止處理程序。
- 異常返回:當(dāng)異常處理程序執(zhí)行完畢后,需要通過異常返回指令將控制權(quán)交還給中斷/異常產(chǎn)生前的程序。這樣,處理器就可以繼續(xù)執(zhí)行原來的任務(wù)。
四、中斷和異常處理流程
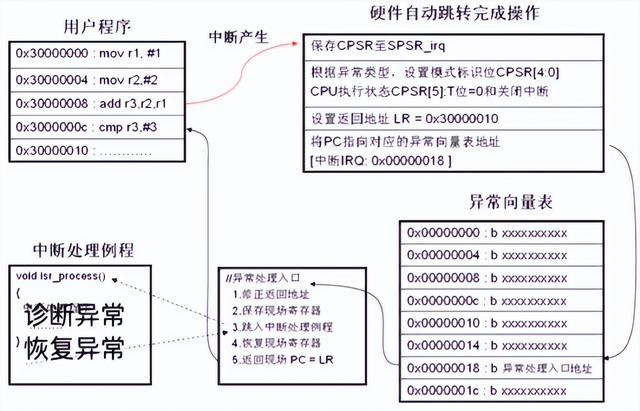
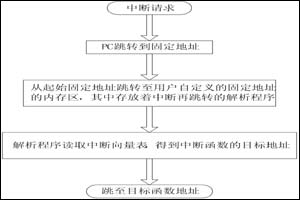
- 中斷處理流程:當(dāng)中斷請求引腳有信號變化時,處理器會執(zhí)行以下步驟:
a) 保存當(dāng)前任務(wù)的上下文,包括寄存器的狀態(tài)和執(zhí)行狀態(tài)。
b) 確定中斷類型,并調(diào)用相應(yīng)的中斷處理程序。
c) 在中斷處理程序中保存其他必要信息,并根據(jù)業(yè)務(wù)需求執(zhí)行相關(guān)操作。
d) 從保存的上下文中恢復(fù)任務(wù)的狀態(tài),并繼續(xù)執(zhí)行中斷前的任務(wù)。 - 異常處理流程:當(dāng)處理器檢測到內(nèi)部異常事件發(fā)生時,會執(zhí)行以下步驟:
a) 保存當(dāng)前任務(wù)的上下文,包括寄存器的狀態(tài)和執(zhí)行狀態(tài)。
b) 根據(jù)異常類型,跳轉(zhuǎn)至相應(yīng)的異常處理程序。
c) 在異常處理程序中保存其他必要信息,并根據(jù)業(yè)務(wù)需求執(zhí)行相關(guān)操作。
d) 從保存的上下文中恢復(fù)任務(wù)的狀態(tài),并繼續(xù)執(zhí)行發(fā)生異常的指令或跳轉(zhuǎn)至其他指令。
五、中斷與異常處理的關(guān)系
中斷和異常的共同點在于它們都可以中斷當(dāng)前任務(wù)的執(zhí)行,轉(zhuǎn)移到相應(yīng)的處理程序中。不同之處在于中斷是從外部設(shè)備發(fā)起的,而異常則是處理器內(nèi)部的錯誤或特殊事件。
在ARM處理器中,中斷的優(yōu)先級通常高于異常。當(dāng)處理器同時收到中斷請求和異常事件時,中斷請求會優(yōu)先被處理。這是因為中斷往往需要及時響應(yīng)外部設(shè)備的請求,而異常則是錯誤或特殊事件的處理,相對而言可以稍后處理。
六、中斷優(yōu)先級
ARM處理器的中斷請求可以設(shè)置不同的優(yōu)先級。通常,高優(yōu)先級的中斷請求會優(yōu)先被處理,而低優(yōu)先級的中斷請求則會被忽略,直到高優(yōu)先級的中斷處理完成。
中斷優(yōu)先級的設(shè)置可以通過中斷控制器完成。中斷控制器將收到的中斷請求進行優(yōu)先級排序,并將優(yōu)先級最高的中斷請求傳遞給處理器。處理器會根據(jù)中斷請求的優(yōu)先級來決定是否中斷當(dāng)前任務(wù)。
總結(jié)
ARM中斷的實現(xiàn)是通過中斷控制器和異常模式來實現(xiàn)的。中斷控制器負(fù)責(zé)接收和分發(fā)外設(shè)發(fā)送的中斷請求信號,而異常模式用于處理處理器內(nèi)部的異常事件。中斷和異常都可以中斷當(dāng)前任務(wù)的執(zhí)行,并跳轉(zhuǎn)至相應(yīng)的處理程序。中斷和異常的處理流程類似,但用途不同。中斷通常用于及時響應(yīng)外部設(shè)備的請求,而異常用于處理處理器內(nèi)部的錯誤或特殊事件。
-
ARM
+關(guān)注
關(guān)注
134文章
9156瀏覽量
368556 -
控制器
+關(guān)注
關(guān)注
112文章
16442瀏覽量
179018 -
數(shù)據(jù)傳輸
+關(guān)注
關(guān)注
9文章
1950瀏覽量
64771 -
引腳
+關(guān)注
關(guān)注
16文章
1216瀏覽量
50775
發(fā)布評論請先 登錄
相關(guān)推薦
ARM中斷體系和ZYNQ中斷體系詳解

什么是ARM中斷事件?ARM中斷異常處理具體過程
ARM S3C2440處理器的中斷處理是如何實現(xiàn)的
ARM內(nèi)核的中斷技術(shù)
ARM處理器中斷處理的編程實現(xiàn)
ARM中斷處理的研究

如何理解ARM異常、中斷和向量表
了解linux-2.6.26內(nèi)核中ARM中斷實現(xiàn)
Linux內(nèi)核中ARM中斷的實現(xiàn)資料詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論