

這次的文章,我們來看一看三維空間直角坐標(biāo)系的平移和旋轉(zhuǎn)變換,盡管這個內(nèi)容早已見諸文獻(xiàn)資料,但自己在看書籍以及期刊論文時,總是遇到讓人百思不得其解的事情,就是不同的文獻(xiàn)給出的同類型的旋轉(zhuǎn)矩陣居然有不一樣的,這讓小D對文獻(xiàn)中的公式產(chǎn)生了懷疑,也不知道哪個旋轉(zhuǎn)矩陣才是對的。
于是,自己動手,豐衣足食,為了驗(yàn)證公式的正確性,小D把旋轉(zhuǎn)矩陣推了個遍,包括文獻(xiàn)中只給出了公式而沒有過程的旋轉(zhuǎn)矩陣的推導(dǎo)。
三維空間直角坐標(biāo)系的平移變換
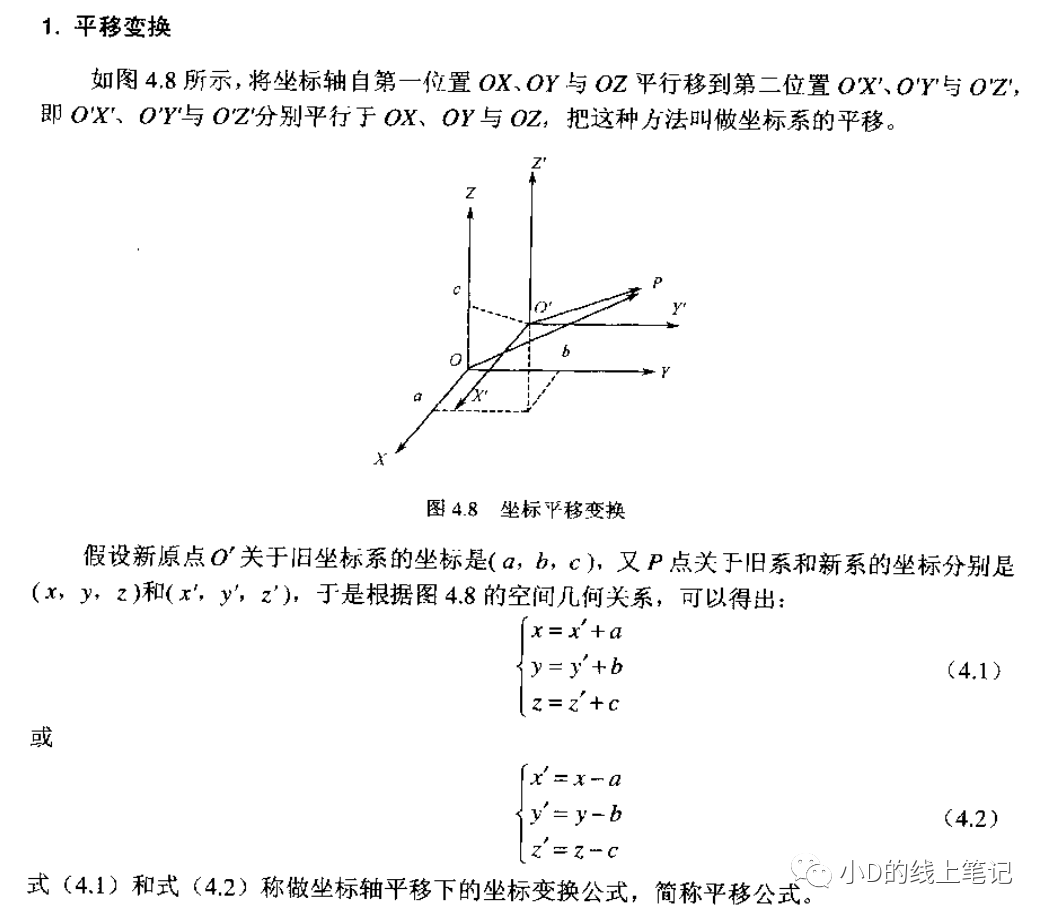
文章的開頭,還是先講講坐標(biāo)系的平移變換,平移變換的過程如下圖所示:
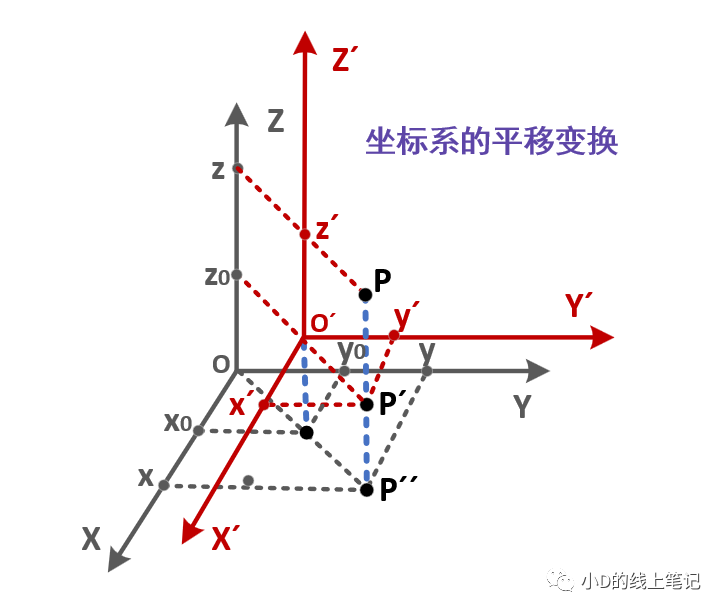
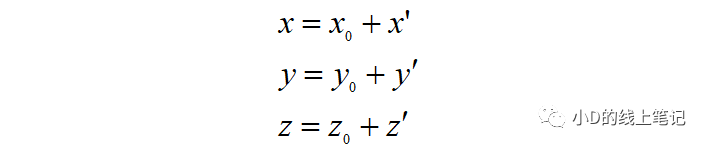
假設(shè)點(diǎn)P是空間中的任意一點(diǎn),其在XYZ坐標(biāo)系中的坐標(biāo)為(x, y, z)。現(xiàn)在點(diǎn)P不動,我們將XYZ坐標(biāo)系做一個平移的操作,把XYZ平移到X′Y′Z′的位置,O′是平移后的坐標(biāo)的原點(diǎn),要注意的是,O′在XYZ中的坐標(biāo)為(x0, y0, z0)。點(diǎn)P在XYZ坐標(biāo)系中的坐標(biāo)為(x, y, z),點(diǎn)P在平移后的坐標(biāo)系X′Y′Z′中的坐標(biāo)為(x′, y′, z′)。根據(jù)上面這個示意圖,聰明的你一下就可以發(fā)現(xiàn):
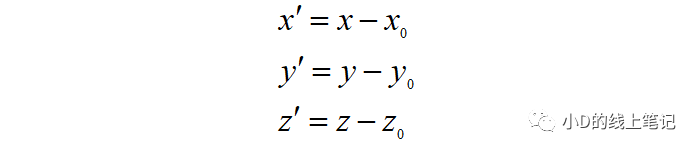
通過上面的式子,我們可以求解出點(diǎn)P在X′Y′Z′坐標(biāo)系中的坐標(biāo)為:
把上面的式子轉(zhuǎn)換成矩陣的形式就是:
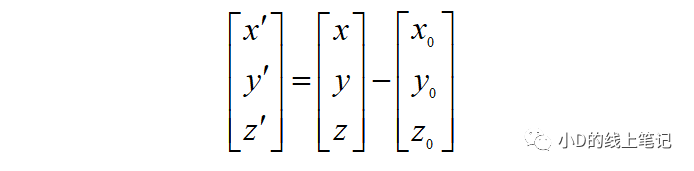
這就是三維空間直角坐標(biāo)系的平移變換了。
三維空間直角坐標(biāo)系的旋轉(zhuǎn)變換
下面我們來看看三維空間直角坐標(biāo)系的旋轉(zhuǎn)變換,小D最開始在研究旋轉(zhuǎn)變換的時候,只推導(dǎo)了右手坐標(biāo)系的旋轉(zhuǎn)變換。有一次看到了一篇文獻(xiàn),它用的是左手坐標(biāo)系,但小D對文獻(xiàn)中給出的公式的正確性感到懷疑,而我們要在代碼中用到相關(guān)的坐標(biāo)轉(zhuǎn)換,這意味著我們需要知道左手坐標(biāo)系旋轉(zhuǎn)矩陣的正確表達(dá)式,所以小D又把左手坐標(biāo)系的旋轉(zhuǎn)矩陣推導(dǎo)了一遍。
右手坐標(biāo)系的旋轉(zhuǎn)變換
右手坐標(biāo)系的旋轉(zhuǎn)過程有三個,分別是繞X,Y,Z軸旋轉(zhuǎn),右手坐標(biāo)系在旋轉(zhuǎn)時,通常規(guī)定以逆時針旋轉(zhuǎn)方向?yàn)檎较颉?/p>
①XYZ右手坐標(biāo)系繞X軸逆時針旋轉(zhuǎn)θ角
先來推導(dǎo)右手坐標(biāo)系繞X軸旋轉(zhuǎn)的旋轉(zhuǎn)矩陣,這個過程可以用下面這個示意圖表示:
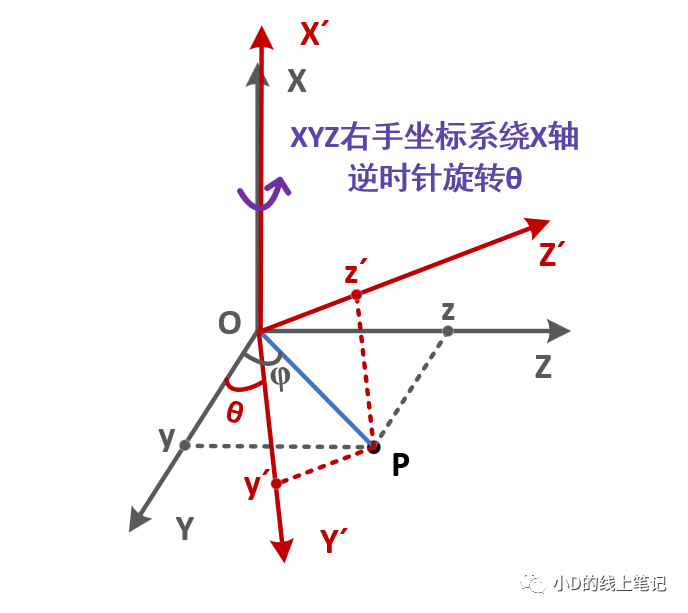
假設(shè)P點(diǎn)為空間中任意一點(diǎn),為了便于觀察與推導(dǎo),我們將P點(diǎn)放在YOZ平面內(nèi)。P點(diǎn)在空間中保持不動,XYZ坐標(biāo)系繞X軸逆時針旋轉(zhuǎn)θ形成新的坐標(biāo)系X′Y′Z′,P點(diǎn)在XYZ中的坐標(biāo)為(x, y, z),P點(diǎn)在X′Y′Z′中的坐標(biāo)為(x′, y′, z′),現(xiàn)在我們已知(x, y, z)、旋轉(zhuǎn)角度θ和(x′, y′, z′),求旋轉(zhuǎn)矩陣Rx。在推導(dǎo)的過程中,我們還要假設(shè)一個變量,就是點(diǎn)P相對于Y軸正方向逆時針的夾角為φ。
很明顯,點(diǎn)P在XYZ坐標(biāo)系中的Y,Z軸坐標(biāo)可以表示為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中Y′,Z′軸坐標(biāo)為:

把x,y帶入x′,y′中,同時P點(diǎn)在XYZ中X軸坐標(biāo)與其在X′Y′Z′坐標(biāo)系中的X′軸坐標(biāo)是相等的,所以有:
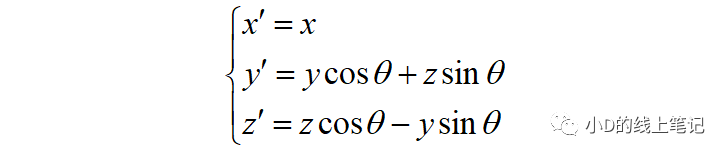
把這個表達(dá)式表示成矩陣相乘的形式為:
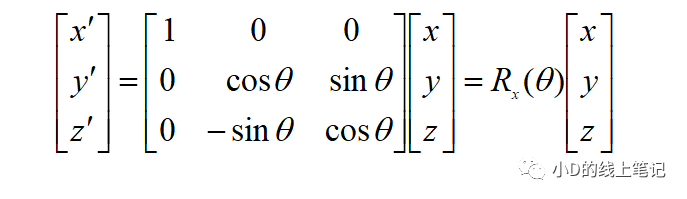
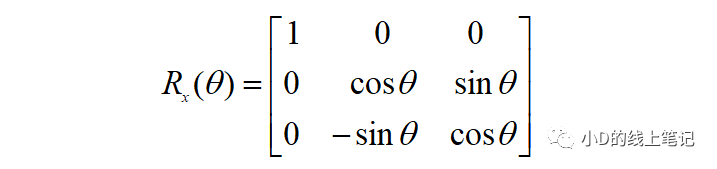
上面的Rx就是XYZ右手坐標(biāo)系繞X軸逆時針旋轉(zhuǎn)θ角,空間中的點(diǎn)從XYZ坐標(biāo)系變換到X′Y′Z′坐標(biāo)系的旋轉(zhuǎn)矩陣,Rx的表達(dá)式為:
②XYZ右手坐標(biāo)系繞Y軸逆時針旋轉(zhuǎn)θ角
有了前面的推導(dǎo)過程,XYZ右手坐標(biāo)系繞Y軸逆時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣的推導(dǎo)就一葫蘆畫瓢了。旋轉(zhuǎn)過程如下圖所示:
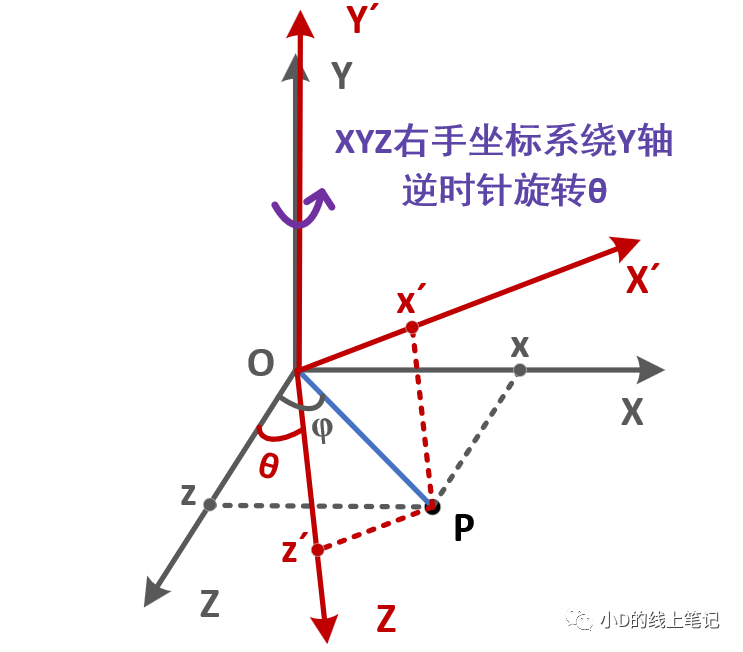
點(diǎn)P在XYZ右手坐標(biāo)系中的X,Z軸坐標(biāo)為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中的X,Z軸坐標(biāo)為:

把x,z帶入x′,z′中,同時P點(diǎn)在XYZ中的Y軸坐標(biāo)與X′Y′Z′坐標(biāo)系中的Y′軸坐標(biāo)是相等的,所以有:
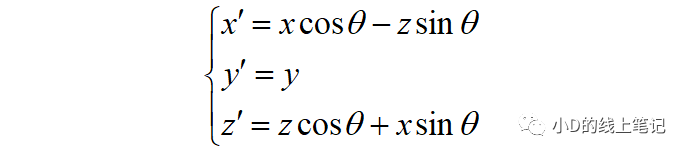
寫成矩陣相乘的形式:
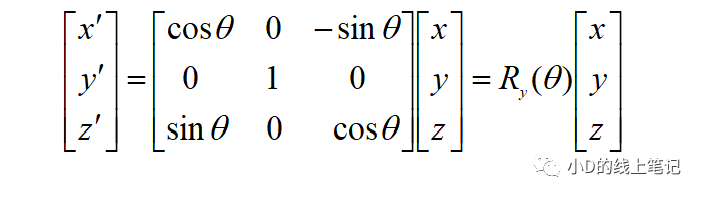
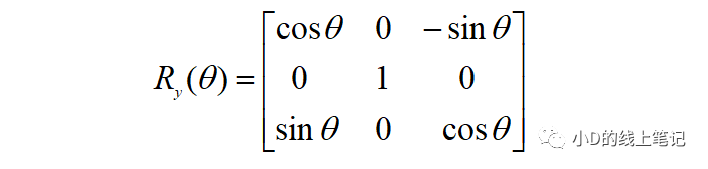
所以,XYZ右手坐標(biāo)系繞Y軸逆時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣Ry為:
③XYZ右手坐標(biāo)系繞Z軸逆時針旋轉(zhuǎn)θ角
XYZ右手坐標(biāo)系繞Z軸逆時針旋轉(zhuǎn)θ的過程如下圖所示:
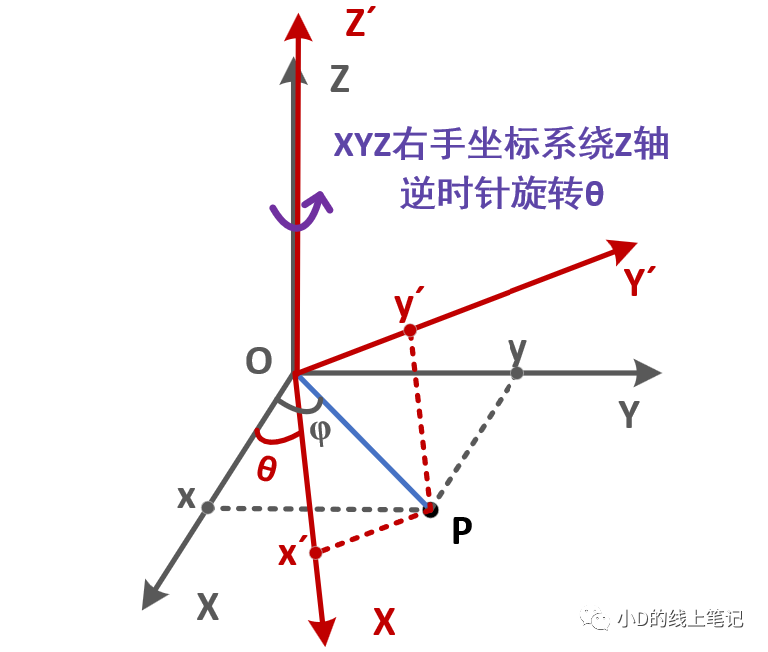
點(diǎn)P在XYZ右手坐標(biāo)系中的X,Y軸坐標(biāo)為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中的x,y坐標(biāo)為:

把x,y帶入x′,y′中,同時P點(diǎn)在XYZ中的Z軸坐標(biāo)與其在X′Y′Z′坐標(biāo)系中的Z′軸坐標(biāo)是相等的,所以有:
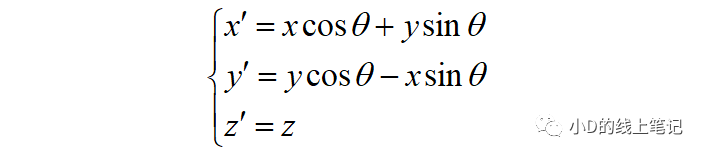
寫成矩陣相乘的形式:
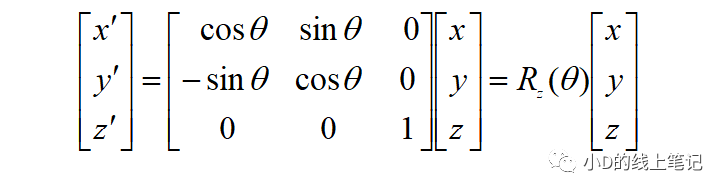
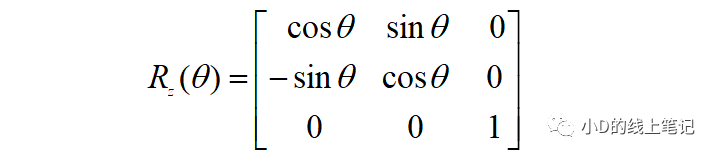
所以,XYZ右手坐標(biāo)系繞Z軸逆時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣Rz為:
左手坐標(biāo)系的旋轉(zhuǎn)變換
左手坐標(biāo)系的旋轉(zhuǎn)過程也是三個,分別是繞X,Y,Z軸旋轉(zhuǎn),左手坐標(biāo)系在旋轉(zhuǎn)時,通常規(guī)定以順時針旋轉(zhuǎn)方向?yàn)檎较颉?/p>
①XYZ左手坐標(biāo)系繞X軸順時針旋轉(zhuǎn)θ角
XYZ左手坐標(biāo)系繞X軸順時針旋轉(zhuǎn)θ角的過程示意圖如下所示:
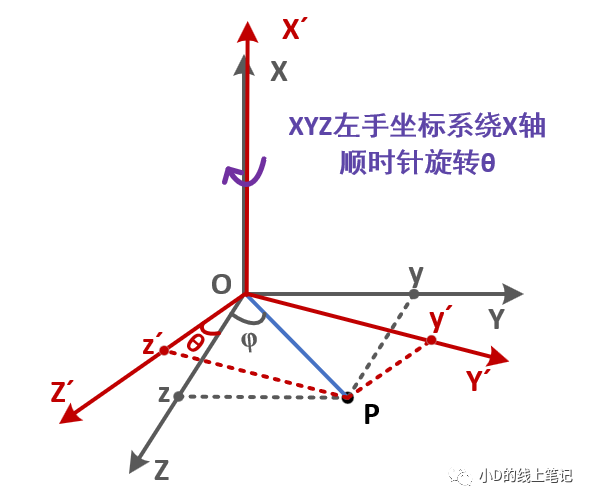
上圖中,點(diǎn)P為空間中任意一點(diǎn),點(diǎn)P保持不動,XYZ左手坐標(biāo)系繞X軸順時針旋轉(zhuǎn)θ角形成新的坐標(biāo)系X′Y′Z′。已知點(diǎn)P在XYZ坐標(biāo)系中的坐標(biāo)為(x,y,z),點(diǎn)P在X′Y′Z′中的坐標(biāo)為(x′,y′,z′),我們要求的是XYZ坐標(biāo)系變換到X′Y′Z′坐標(biāo)系這個過程中的旋轉(zhuǎn)矩陣。
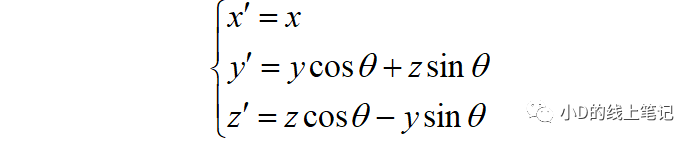
從圖中可以看出,點(diǎn)P在XYZ坐標(biāo)系中的Y,Z軸坐標(biāo)為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中的Y,Z軸坐標(biāo)為:

把y,z帶入y′,z′中,同時P點(diǎn)在XYZ中的X軸坐標(biāo)與其在X′Y′Z′中的X′軸坐標(biāo)是相等的,所以有:
寫成矩陣相乘的形式:
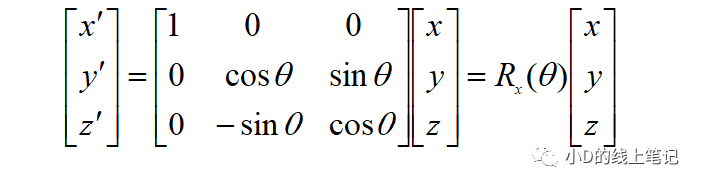
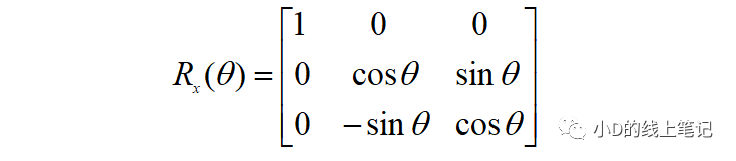
所以,XYZ左手坐標(biāo)系繞X軸順時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣為:
②XYZ左手坐標(biāo)系繞Y軸順時針旋轉(zhuǎn)θ角
XYZ左手坐標(biāo)系繞Y軸順時針旋轉(zhuǎn)θ角形成X′Y′Z′坐標(biāo)系,其過程示意圖如下所示:
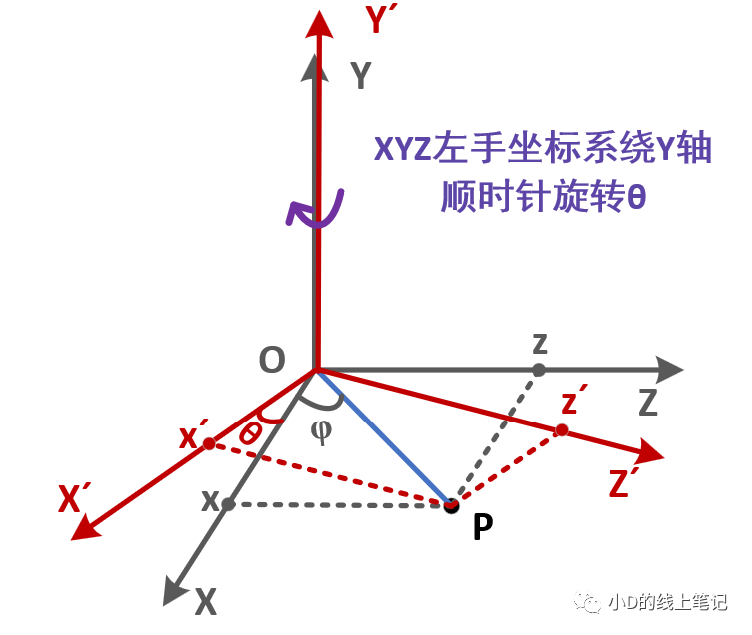
點(diǎn)P在XYZ坐標(biāo)系中的X,Z軸坐標(biāo)為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中的X,Z軸坐標(biāo)為:

把x,z帶入x′,z′中,同時P點(diǎn)在XYZ中的Y軸坐標(biāo)與其在X′Y′Z′坐標(biāo)系中的Y′軸坐標(biāo)是相等的,所以有:
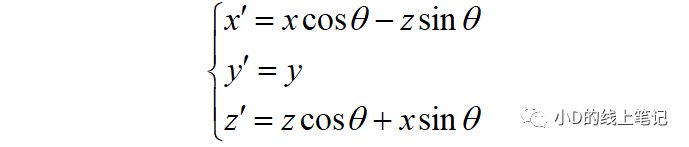
以矩陣形式表示為:
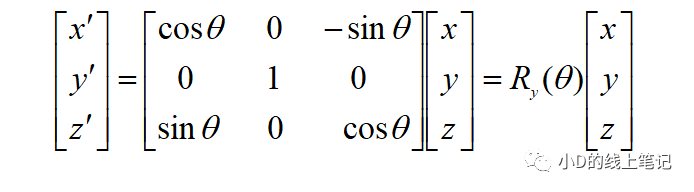
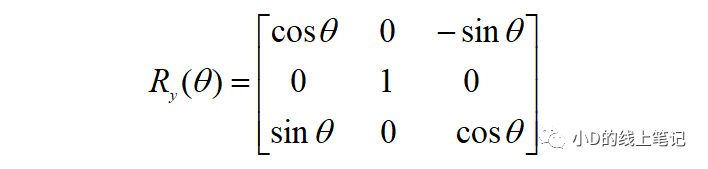
所以,XYZ左手坐標(biāo)系繞Y軸順時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣Ry為:
③XYZ左手坐標(biāo)系繞Z軸順時針旋轉(zhuǎn)θ角
XYZ左手坐標(biāo)系繞Z軸順時針旋轉(zhuǎn)θ角形成X′Y′Z′坐標(biāo)系的過程示意圖如下所示:
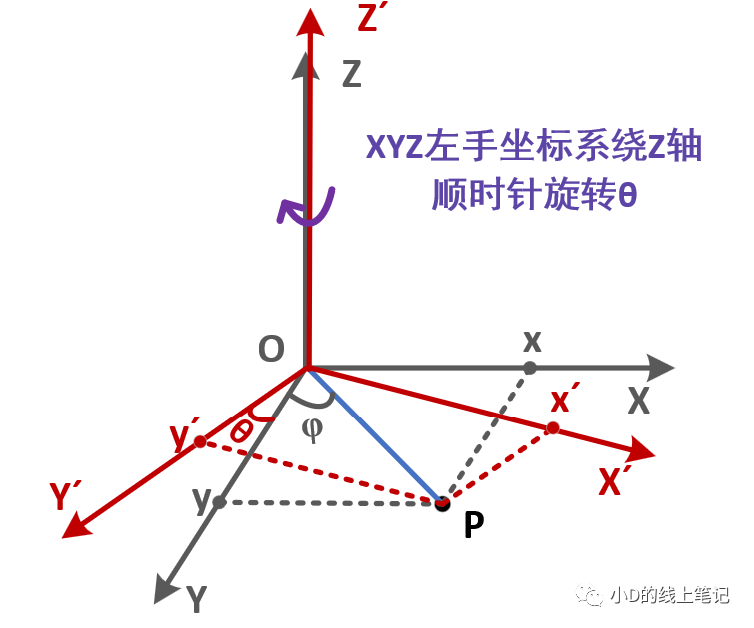
點(diǎn)P在XYZ坐標(biāo)系中的X,Y軸坐標(biāo)為:

點(diǎn)P在X′Y′Z′坐標(biāo)系中的X,Y軸坐標(biāo)為:

把x,y帶入x′,y′中,同時P點(diǎn)在XYZ中的Z軸坐標(biāo)與其在X′Y′Z′坐標(biāo)系中的Z′軸坐標(biāo)是相等的,所以有:
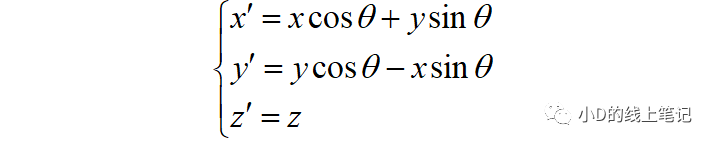
將上式表示成矩陣的形式為:
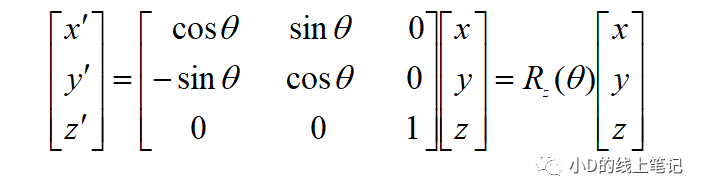
所以,XYZ左手坐標(biāo)系繞Z軸順時針旋轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣Rz為:
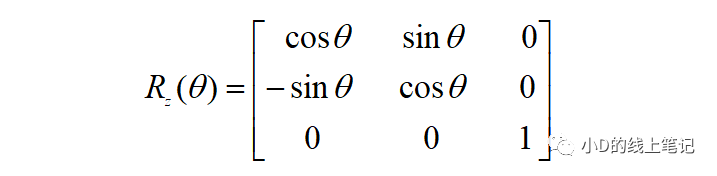
左手坐標(biāo)系的旋轉(zhuǎn)矩陣到這里就推導(dǎo)完啦。
旋轉(zhuǎn)矩陣的運(yùn)用
實(shí)際中,當(dāng)我們要推導(dǎo)兩個不同的坐標(biāo)系,比如地心地固坐標(biāo)系和北東天、北東天坐標(biāo)系和機(jī)體坐標(biāo)系等坐標(biāo)系之間的變換關(guān)系時,就要用到上面的旋轉(zhuǎn)矩陣。一般的方法是,根據(jù)實(shí)際的旋轉(zhuǎn)過程,按旋轉(zhuǎn)的先后順序計(jì)算旋轉(zhuǎn)矩陣。
比如對于右手坐標(biāo)系,如果有一個過程是先繞Y軸逆時針旋轉(zhuǎn)α,再繞X軸順時針旋轉(zhuǎn)β,最后繞Z軸逆時針旋轉(zhuǎn)γ,那么最終的旋轉(zhuǎn)矩陣的表達(dá)就是:

在應(yīng)用旋轉(zhuǎn)矩陣的過程中,小D還總結(jié)了一個經(jīng)驗(yàn):不管是左手坐標(biāo)系還是右手坐標(biāo)系,假如繞X軸逆時針旋轉(zhuǎn)θ角,相當(dāng)于繞X軸順時針旋轉(zhuǎn)2π-θ角,同時也相當(dāng)于繞X軸順時針旋轉(zhuǎn)-θ角。
旋轉(zhuǎn)矩陣的驗(yàn)證
推導(dǎo)了這么多公式,那推導(dǎo)結(jié)果是否正確呢?我們可以從《雷達(dá)數(shù)據(jù)處理及應(yīng)用》中找到相關(guān)內(nèi)容:
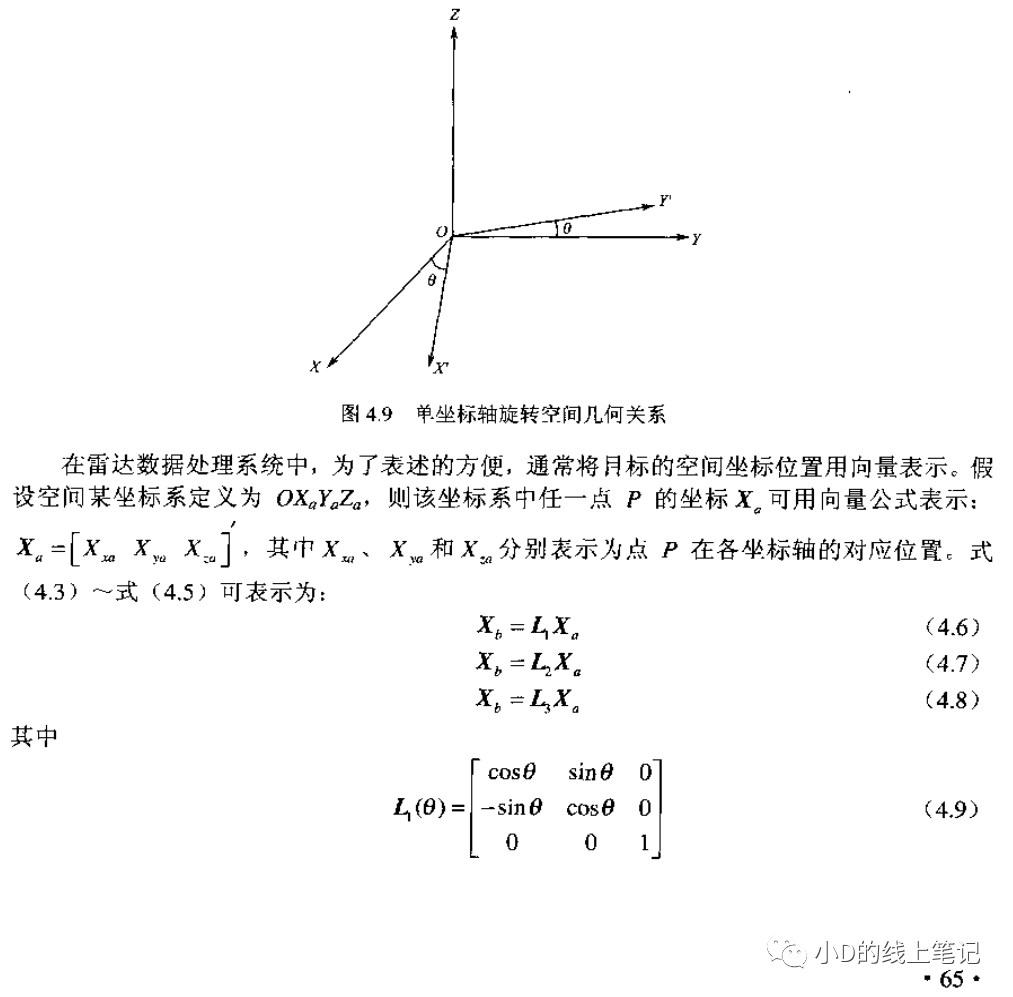
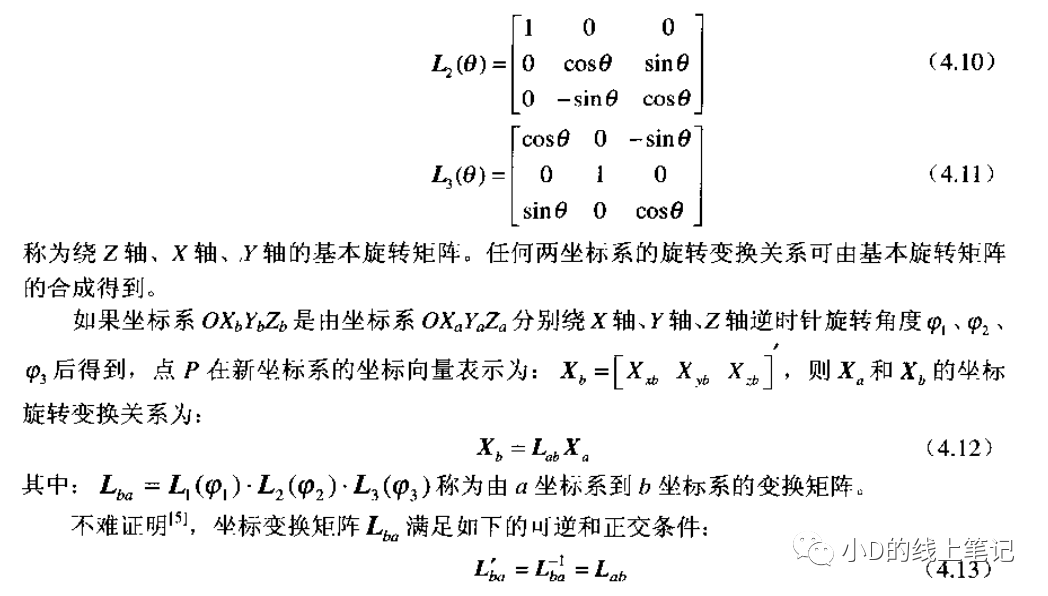
從書中的截圖中可以驗(yàn)證,自己推導(dǎo)的平移變換以及右手坐標(biāo)系的旋轉(zhuǎn)矩陣是沒有問題的。但是左手坐標(biāo)系的推導(dǎo),小D至今沒有找到相關(guān)文獻(xiàn),但小D相信肯定是有的。
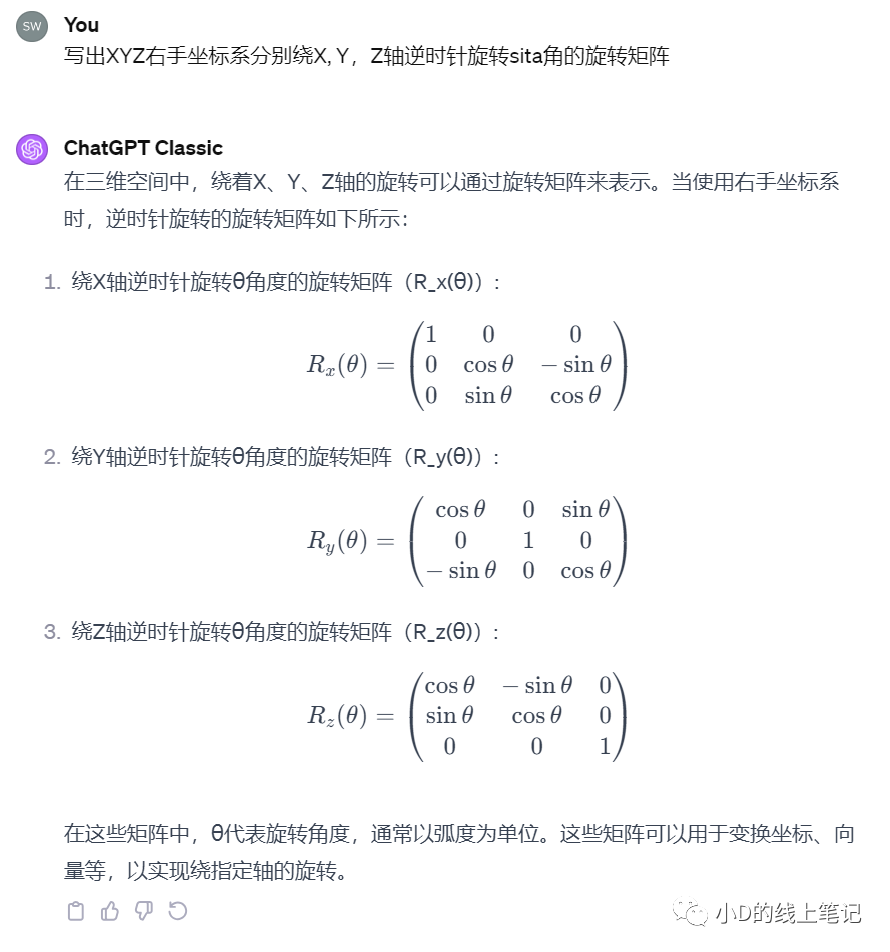
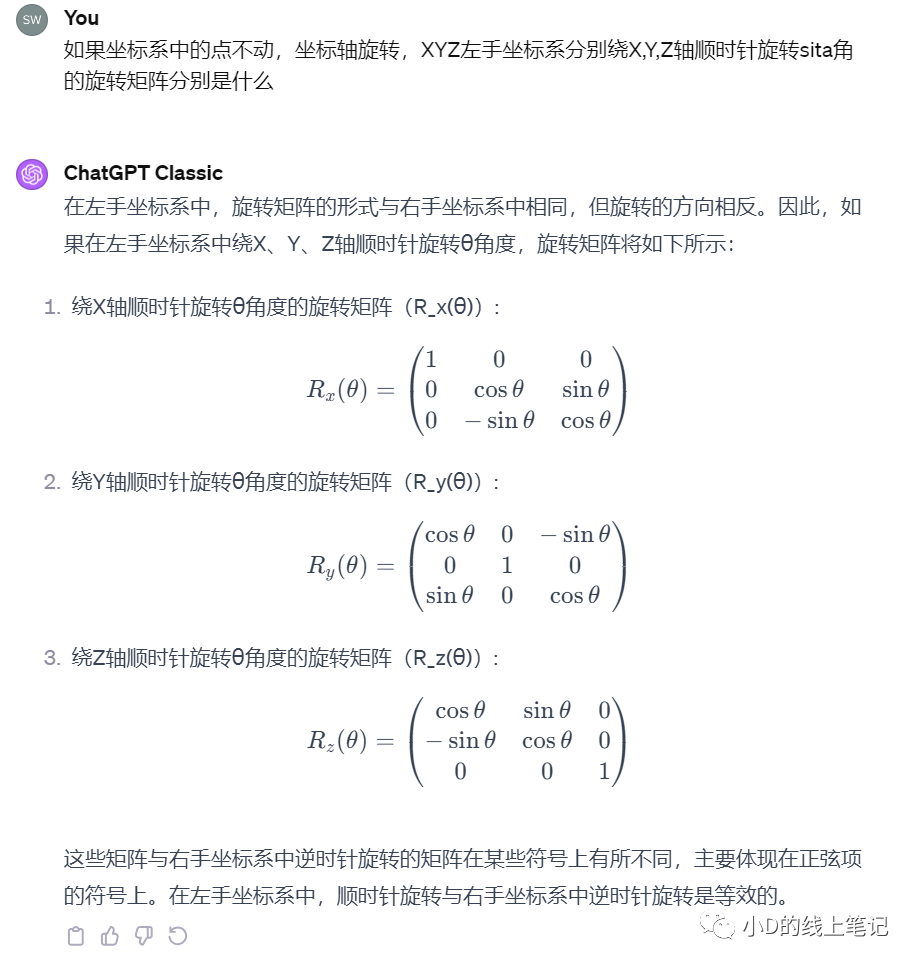
然后小D向gpt求證,gpt給出的答案是這樣的:

很顯然,gpt給出的右手坐標(biāo)系的旋轉(zhuǎn)矩陣不是小D上面推導(dǎo)的結(jié)果,也跟書中的結(jié)果不一樣。于是小D又去問了gpt4,gpt4的回答是這樣的:
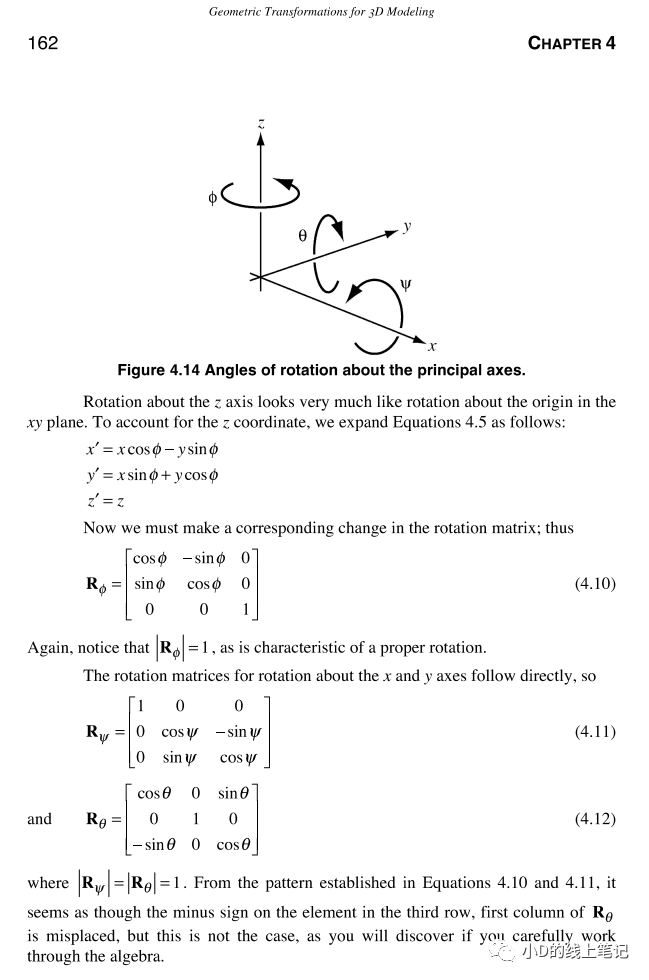
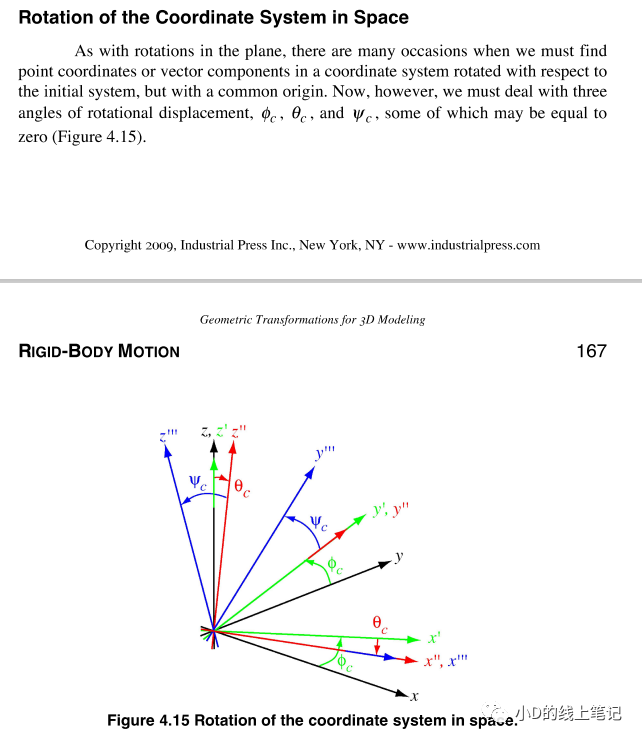
gpt4的回答和gpt3.5的回答如出一轍,當(dāng)時小D心想,gpt腦子估計(jì)又瓦特了。直到最近,小D看到了一本英文書籍Geometric Transformations for 3D Modeling_Michael Mortenson,小D才明白,原來gpt是沒有正確理解問題,它給出的是坐標(biāo)系中的點(diǎn)轉(zhuǎn)動,坐標(biāo)軸不動的情況。這本英文書籍中坐標(biāo)轉(zhuǎn)換相關(guān)的內(nèi)容是這樣的:
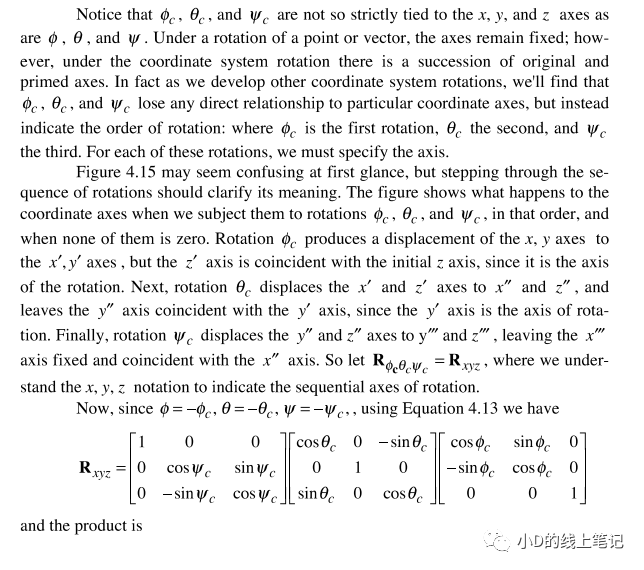
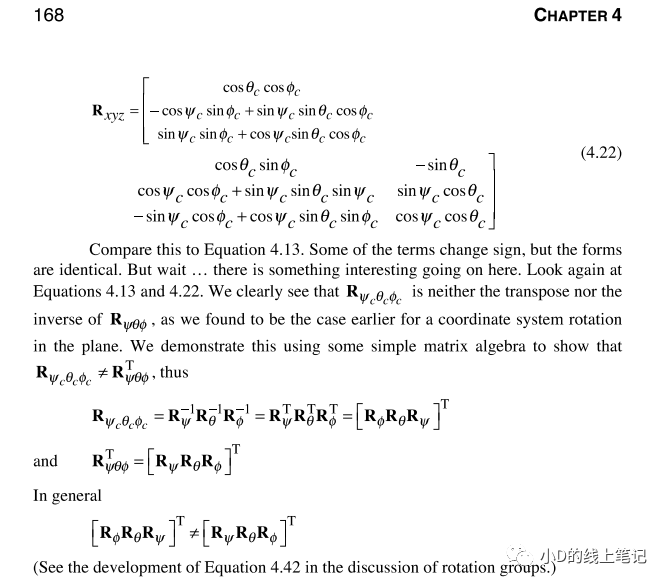
這個時候,小D才明白為什么gpt會給出那樣的答案,因?yàn)樾D(zhuǎn)分為兩種:
①點(diǎn)不動,坐標(biāo)軸旋轉(zhuǎn),就是小D推導(dǎo)的公式
②坐標(biāo)軸不動,點(diǎn)旋轉(zhuǎn),就是gpt第一次回答的公式
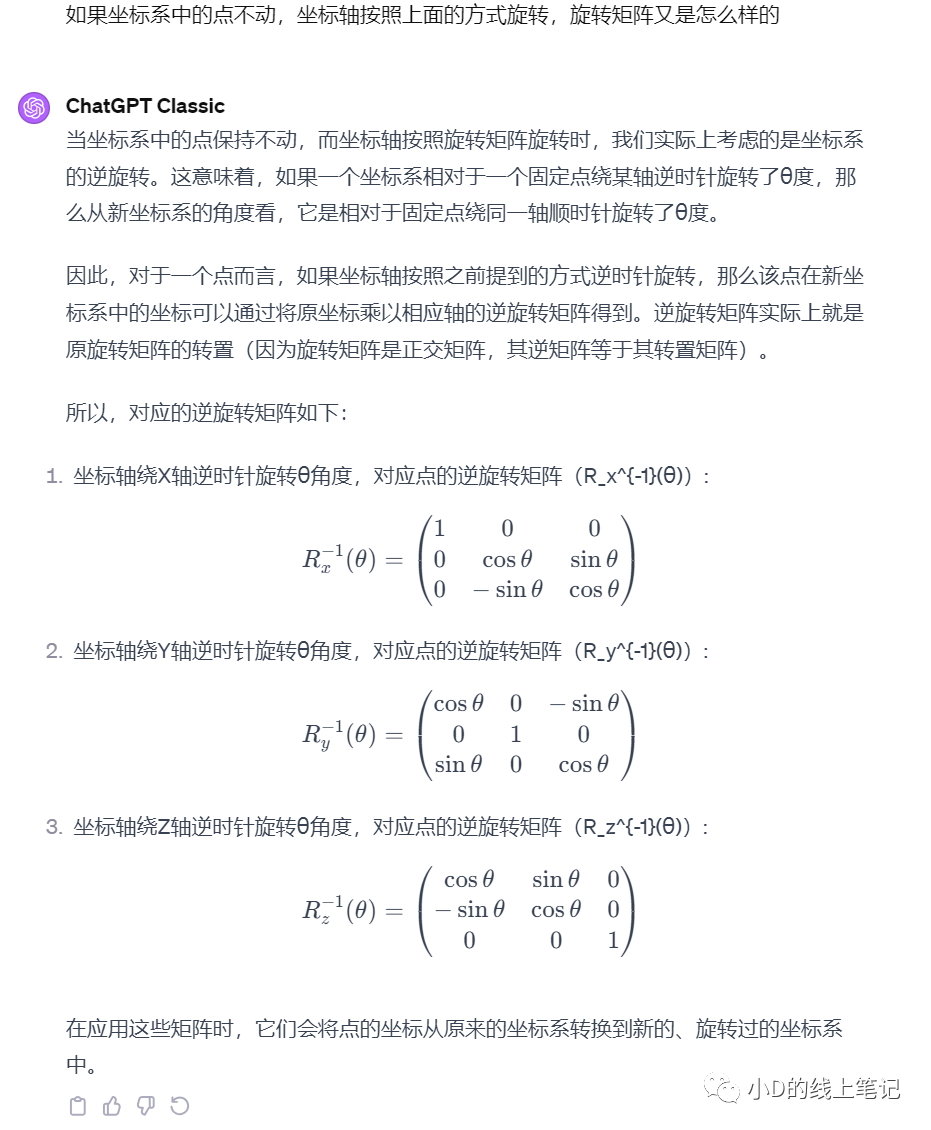
以另一種方式問它,它就回答對了“點(diǎn)不動,坐標(biāo)軸旋轉(zhuǎn)”的旋轉(zhuǎn)矩陣正確的公式:
到這里,就驗(yàn)證了小D推導(dǎo)的坐標(biāo)轉(zhuǎn)換的所有公式啦。
審核編輯:湯梓紅
-
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7443 -
三維空間
+關(guān)注
關(guān)注
0文章
19瀏覽量
7600
原文標(biāo)題:坐標(biāo)系的平移、旋轉(zhuǎn)變換——超詳細(xì)
文章出處:【微信號:FPGA算法工程師,微信公眾號:FPGA算法工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
講座2 信號變換基礎(chǔ) -- 線性空間及正交變換的基本理論
轉(zhuǎn):繞任意空間軸旋轉(zhuǎn)三維圖形
如何使用labview根據(jù)XYZ坐標(biāo)實(shí)時繪制三維曲線
在新式-圖形-三維圖形-曲面中應(yīng)用圓柱坐標(biāo)系
電機(jī)控制系統(tǒng)中直角坐標(biāo)系與極坐標(biāo)系的優(yōu)勢比較,請問TI是否有現(xiàn)成的demo例程?
CAD制圖軟件新手攻略:坐標(biāo)系及標(biāo)注坐標(biāo)
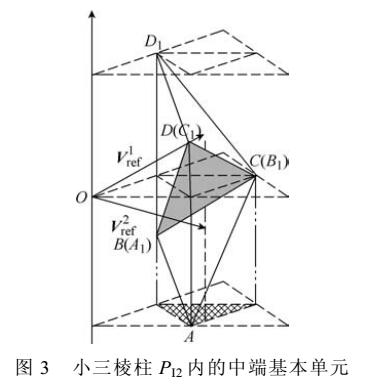
多電平逆變器三維空間矢量調(diào)制
非正交三維坐標(biāo)系下多電平空間矢量調(diào)制策略
機(jī)器人4大坐標(biāo)系講解
如何使用FPGA實(shí)現(xiàn)abc坐標(biāo)系的三維空間矢量調(diào)制算法
立體倉庫三維空間路徑優(yōu)化方案的介紹
介紹導(dǎo)航坐標(biāo)系與載體坐標(biāo)系之間的姿態(tài)旋轉(zhuǎn)矩陣
自動駕駛各個坐標(biāo)系

自動駕駛中的各種時空坐標(biāo)系
焊接機(jī)器人坐標(biāo)系有哪幾種






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論