") EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(四):板載IO與總線擴展IO的編碼器與脈沖配置的應(yīng)用
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(四):板載IO與總線擴展IO的編碼器與脈沖配置的應(yīng)用
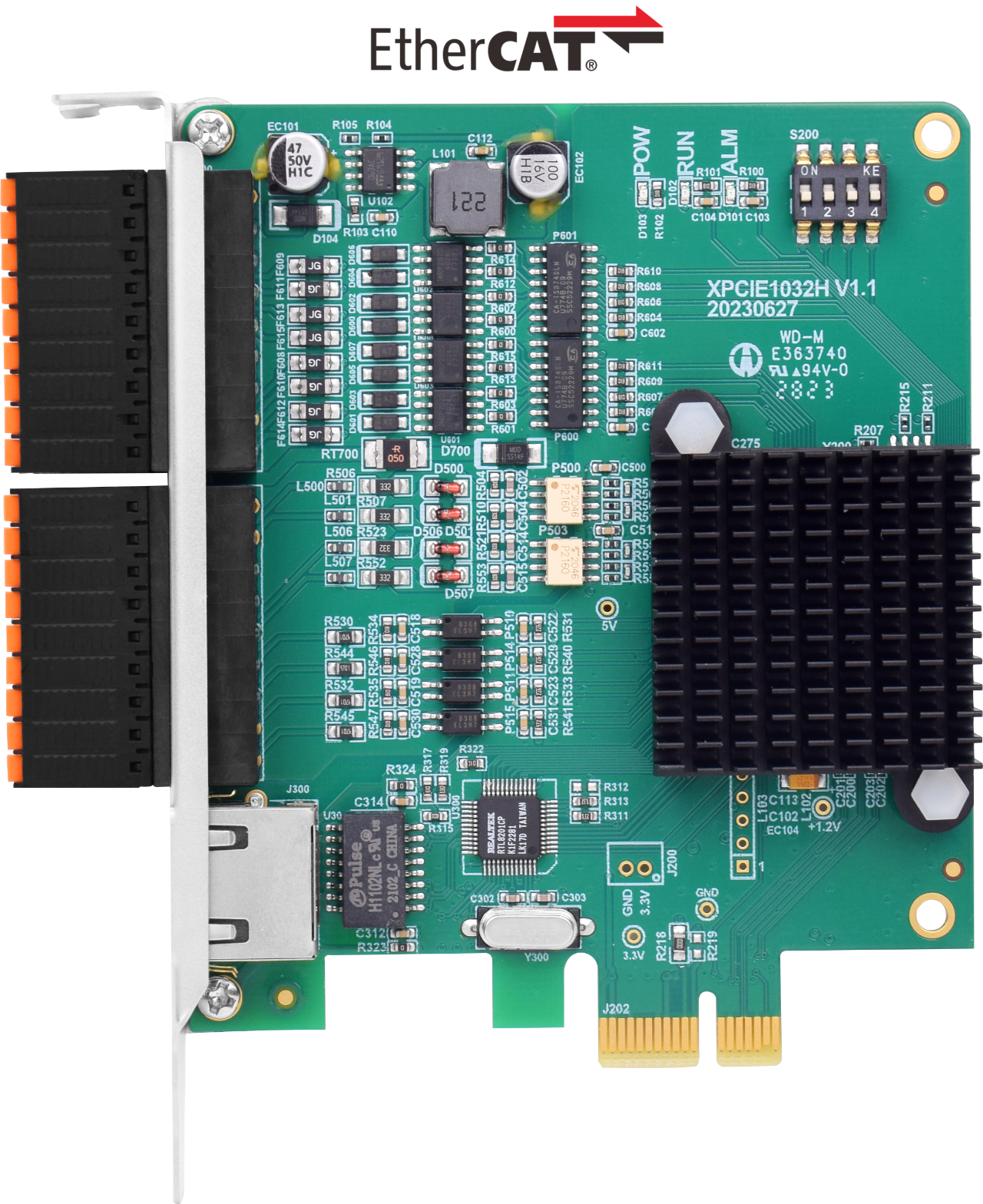
XPCIE1032H功能簡介
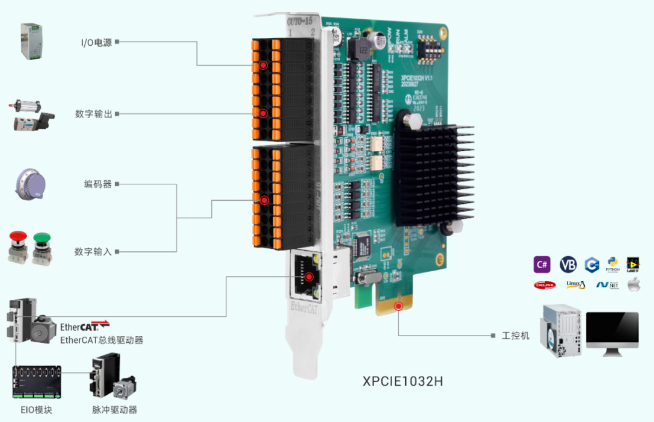
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數(shù)字輸入輸出,可輕松實現(xiàn)多軸同步控制和高速數(shù)據(jù)傳輸。XPCIE1032H運動控制卡集成了強大的運動控制功能,結(jié)合MotionRT7運動控制實時軟核,解決了高速高精應(yīng)用中,PC Windows開發(fā)的非實時痛點,指令交互速度比傳統(tǒng)的PCI/PCIe快10倍。

XPCIE1032H運動控制卡支持PWM,PSO功能,板載16進16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標(biāo)鎖存或兩路編碼器輸入。
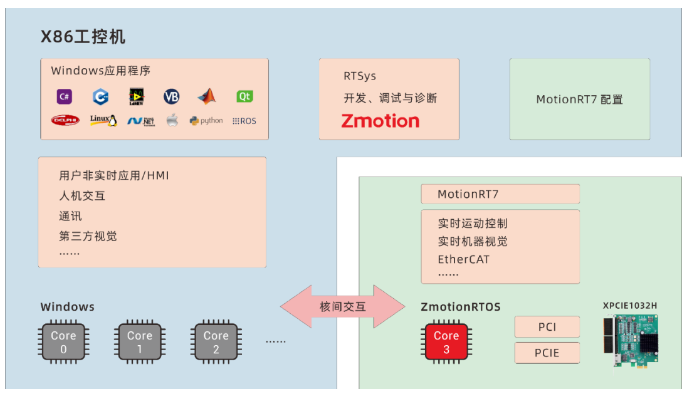
XPCIE1032H運動控制卡搭配MotionRT7運動控制實時內(nèi)核,使用本地LOCAL接口連接,通過高速的核內(nèi)交互 , 可以做到更快速的指令交互,單條指令與多條指令一次性交互時間可以達到3-5us左右。
?XPCIE1032H運動控制卡與MotionRT7運動控制實時內(nèi)核的配合具有以下優(yōu)勢:
1.支持多種上位機語言開發(fā),所有系列產(chǎn)品均可調(diào)用同一套API函數(shù)庫;
2.借助核內(nèi)交互,可以快速調(diào)用運動指令,響應(yīng)時間快至微秒級,比傳統(tǒng)PCI/PCIe快10倍;
3.解決傳統(tǒng)PCI/PCIe運動控制卡在Windows環(huán)境下控制系統(tǒng)的非實時性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點膠和激光能量控制等應(yīng)用;
5.提供高速輸入接口,便于實現(xiàn)位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯(lián)動、混合插補。

?使用XPCIE1032H運動控制卡和MotionRT7運動控制實時內(nèi)核進行項目開發(fā)時,通常需要進行以下步驟:
1.安裝驅(qū)動程序,識別XPCIE1032H;
2.打開并執(zhí)行文件“MotionRT710.exe”,配置參數(shù)和運行運動控制實時內(nèi)核;
3.使用ZDevelop軟件連接到控制器,進行參數(shù)監(jiān)控。連接時請使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開發(fā),通過LOCAL鏈接方式連接到運動控制卡,實現(xiàn)實時運動控制。

?與傳統(tǒng)PCI/PCIe卡和PLC的測試數(shù)據(jù)結(jié)果對比:
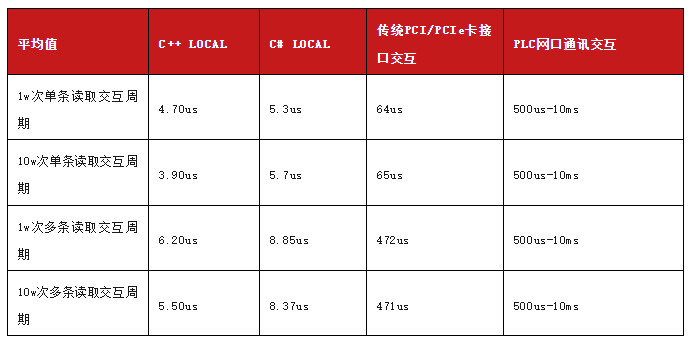
我們可以從測試對比結(jié)果看出,XPCIE1032H運動控制卡配合實時運動控制內(nèi)核MotionRT7,在LOCAL鏈接(核內(nèi)交互)的方式下,指令交互的效率是非常穩(wěn)定,當(dāng)測試數(shù)量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,非常適用于高速高精的應(yīng)用。
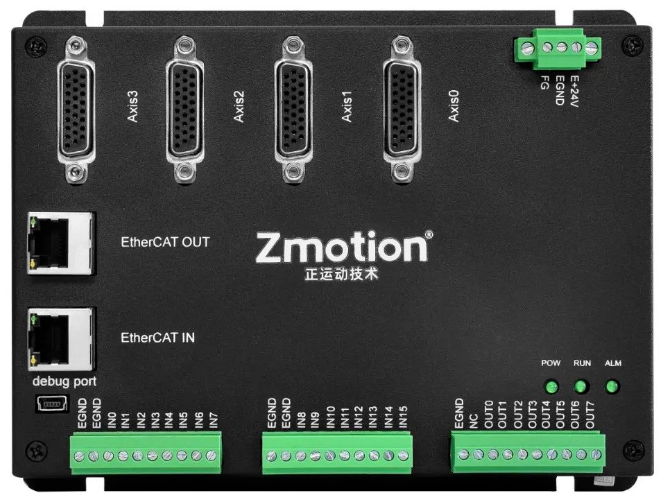
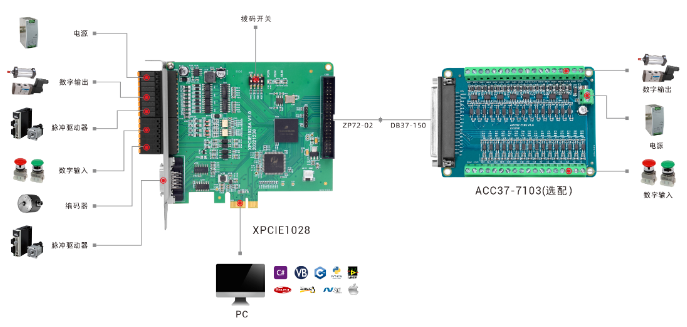
XPCIE1032H控制卡安裝
關(guān)閉計算機電源。
打開計算機機箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應(yīng)的擋板條。
將運動控制卡插入該槽,擰緊擋板條上的固定螺絲。
XPCIE1032H驅(qū)動安裝與建立連接參考往期文章EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(一):驅(qū)動安裝與建立連接。
一、C#語言進行運動控制開發(fā)
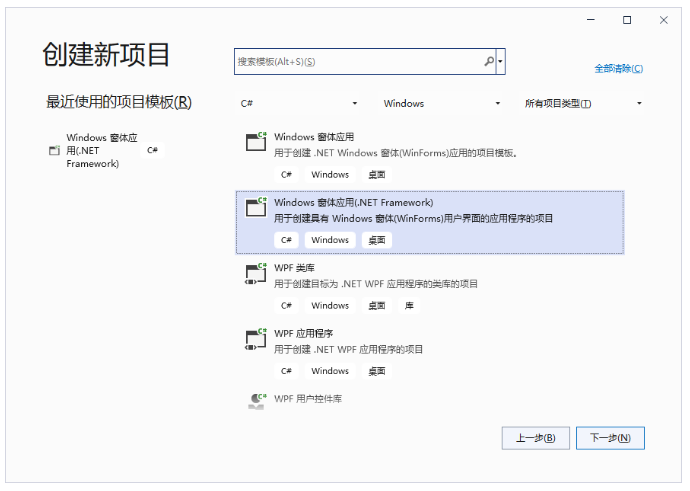
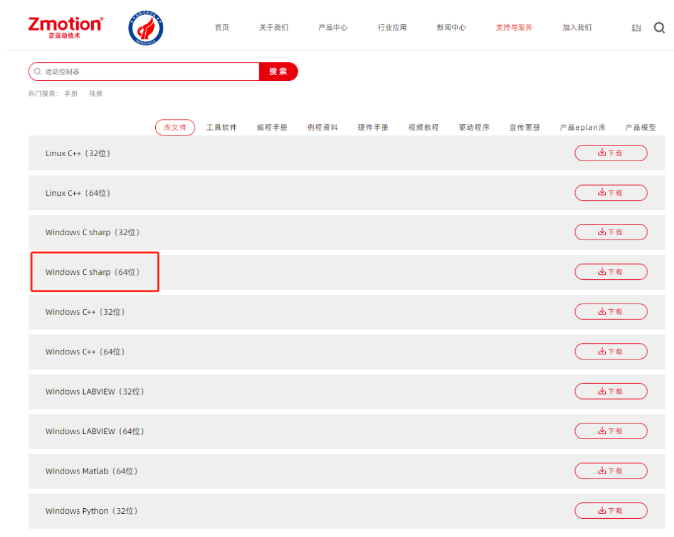
到正運動技術(shù)官網(wǎng)的下載中心選擇需要的平臺庫文件。
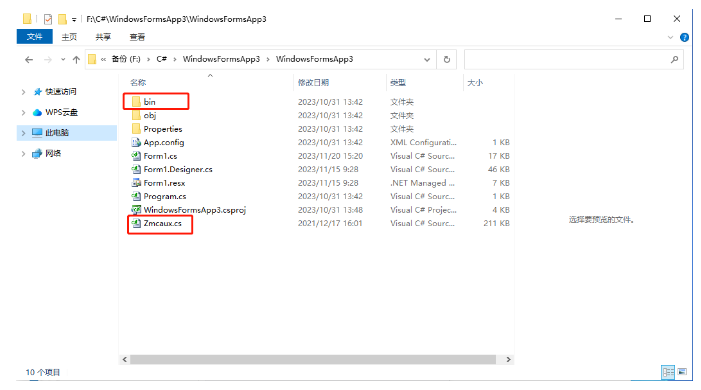
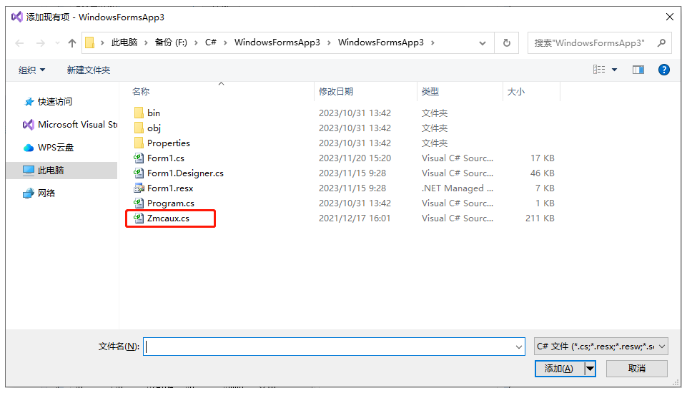
解壓下載的安裝包找到 “ Zmcaux.cs ” , “zauxdll.dll ” , “zmotion.dll ” 放入到項目文件中。
1、“Zmcaux.cs”放在項目根目錄文件中,與bin目錄同級。
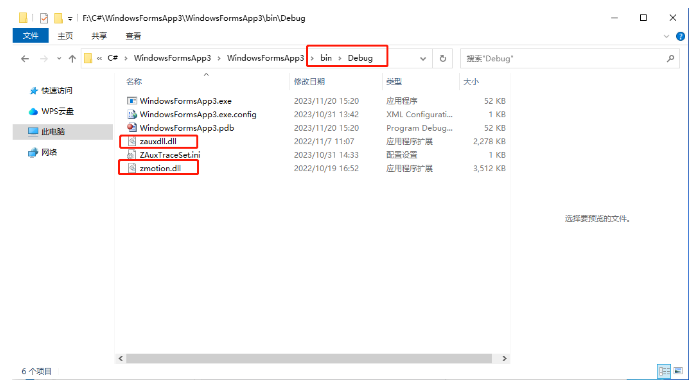
2、“zauxdll.dll”,“zmotion.dll”放在bin -> Debug。
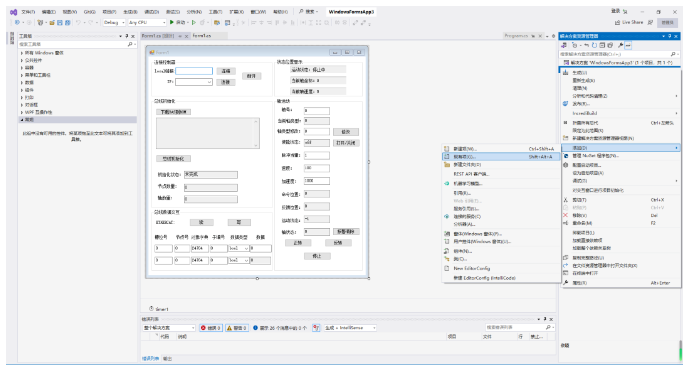
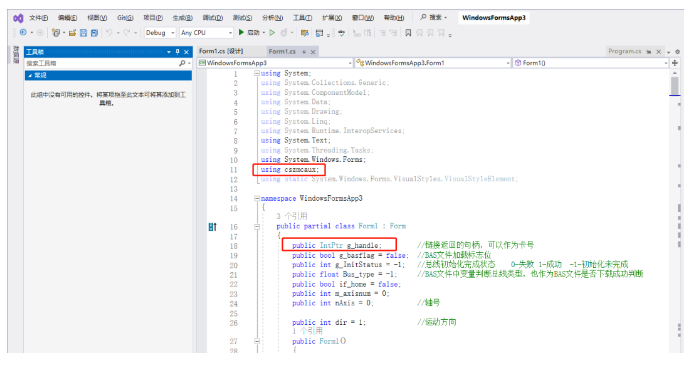
用vs打開新建的項目文件,在右邊的解決方案資源管理器中點擊顯示所有,選中項目,右鍵“添加”->“現(xiàn)有項”,選中zmcaux.cs文件添加進在項目中。
雙擊Form1.cs里面的Form1,出現(xiàn)代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
二、相關(guān)PC函數(shù)介紹
相關(guān)PC函數(shù)介紹詳情可參考“ZMotion PC函數(shù)庫編程手冊 V2.1.1”。
三、XPCIE1032H板載IO的編碼器與脈沖配置
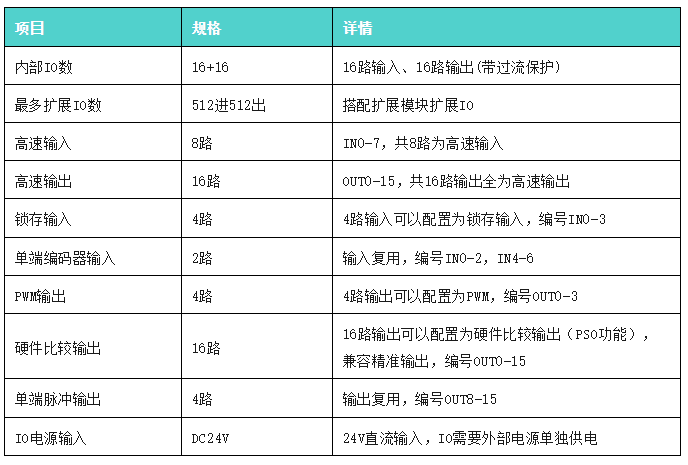
1、XPCIE1032H的IO接口規(guī)格如下
2、IO端子定義如下
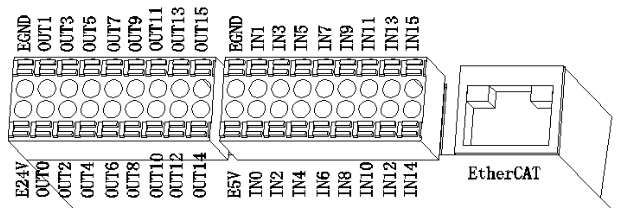
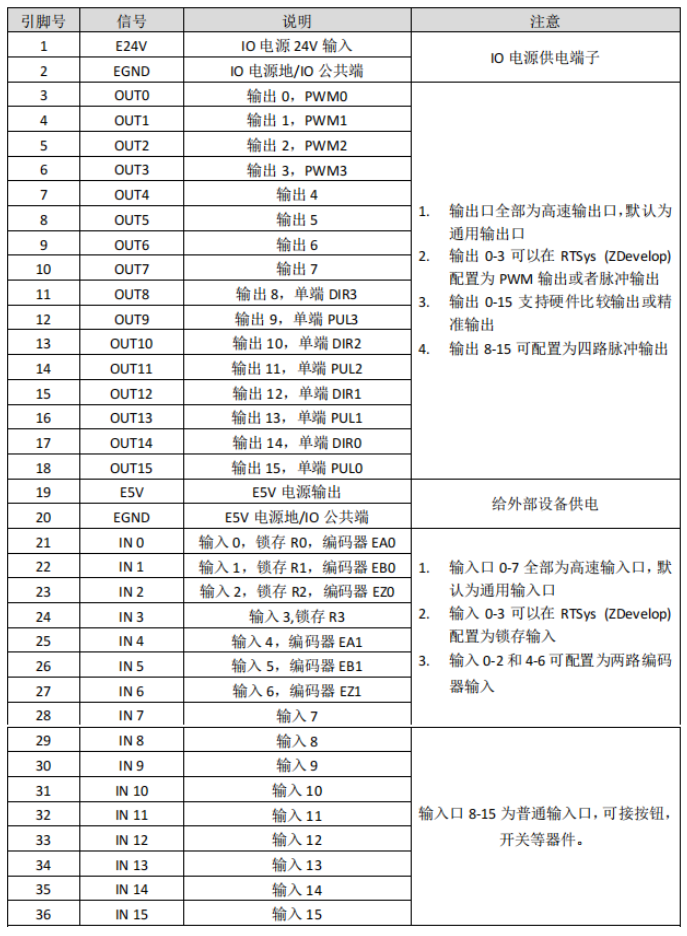 端子定義表
端子定義表
注意事項:
⊙只能使用24V編碼器,編碼器0和編碼器1的脈沖輸入最高頻率為500kHz,可以接高速編碼器,其它的為普通輸入,脈沖最高頻率10kHz,只能接手輪之類的低速編碼器。
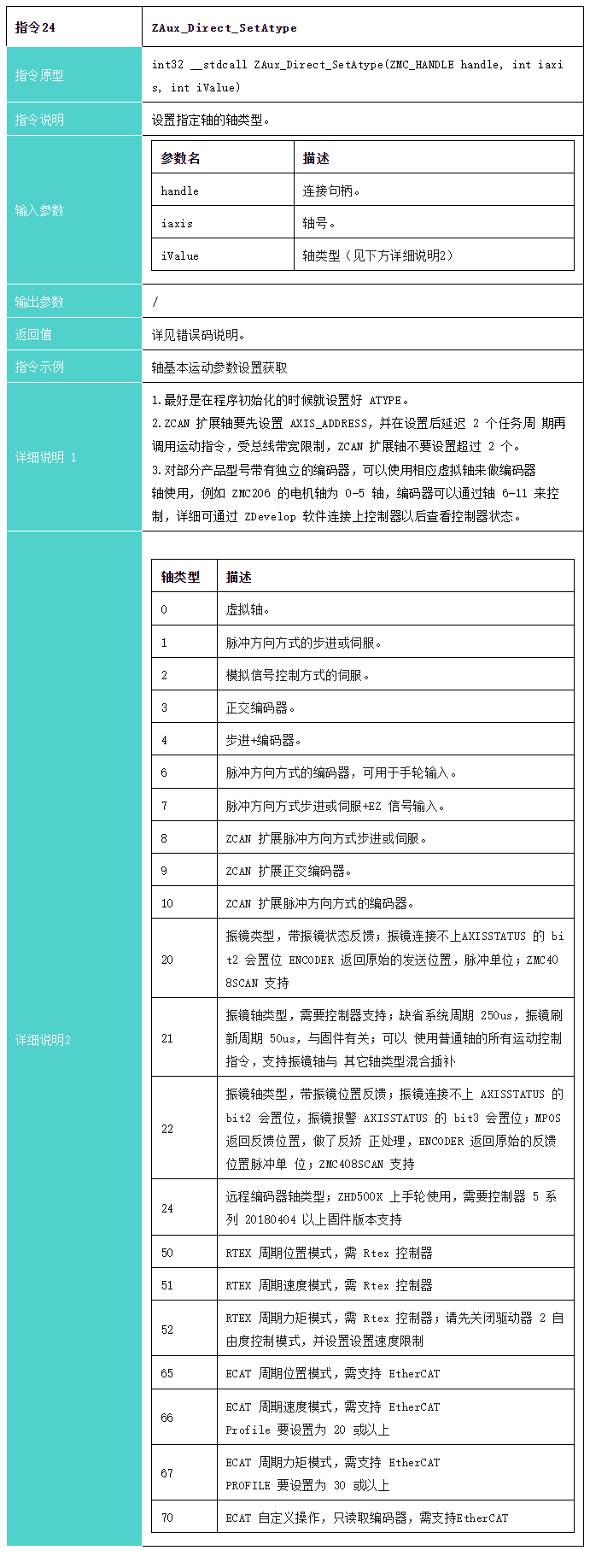
⊙脈沖輸出和編碼器輸入后的編號為默認(rèn)的軸號,通過ATYPE指令切換IO口是否為通用IO(目標(biāo)軸的ATYPE=0為通用IO,ATYPE=1為脈沖輸出,ATYPE=3為編碼器輸入,ATYPE=4為脈沖輸出+編碼器輸入)。
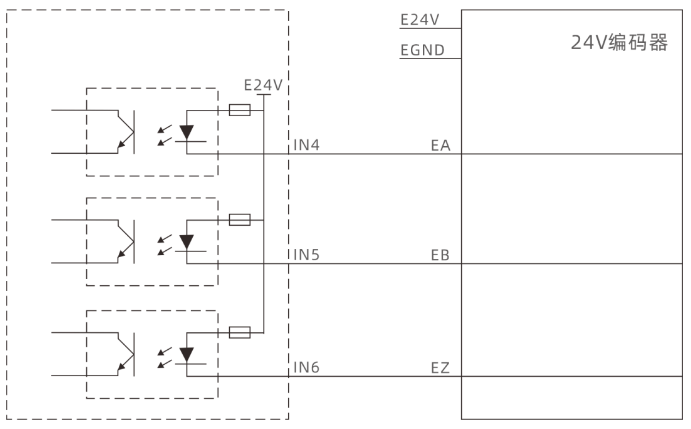
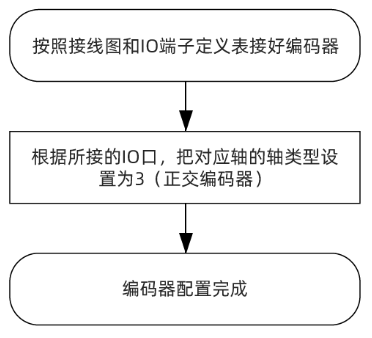
3、輸入口做編碼器配置
XPCIE1032H板載2路24V的單端編碼器輸入。(本例以采用IN4-6連接編碼器來說明)。首先按接線圖進行接線,接線完成后,因為其中IN4為EA1、IN5為EB1、IN6為EZ1,對應(yīng)的編碼器軸號為1。 所以通過上位機把軸1的軸類型設(shè)置為3 ( 正交編碼器 ) 配置后, IN 即可作為編碼器輸入信號使用。
(1)配置流程圖如下。
(2)例程相關(guān)代碼。
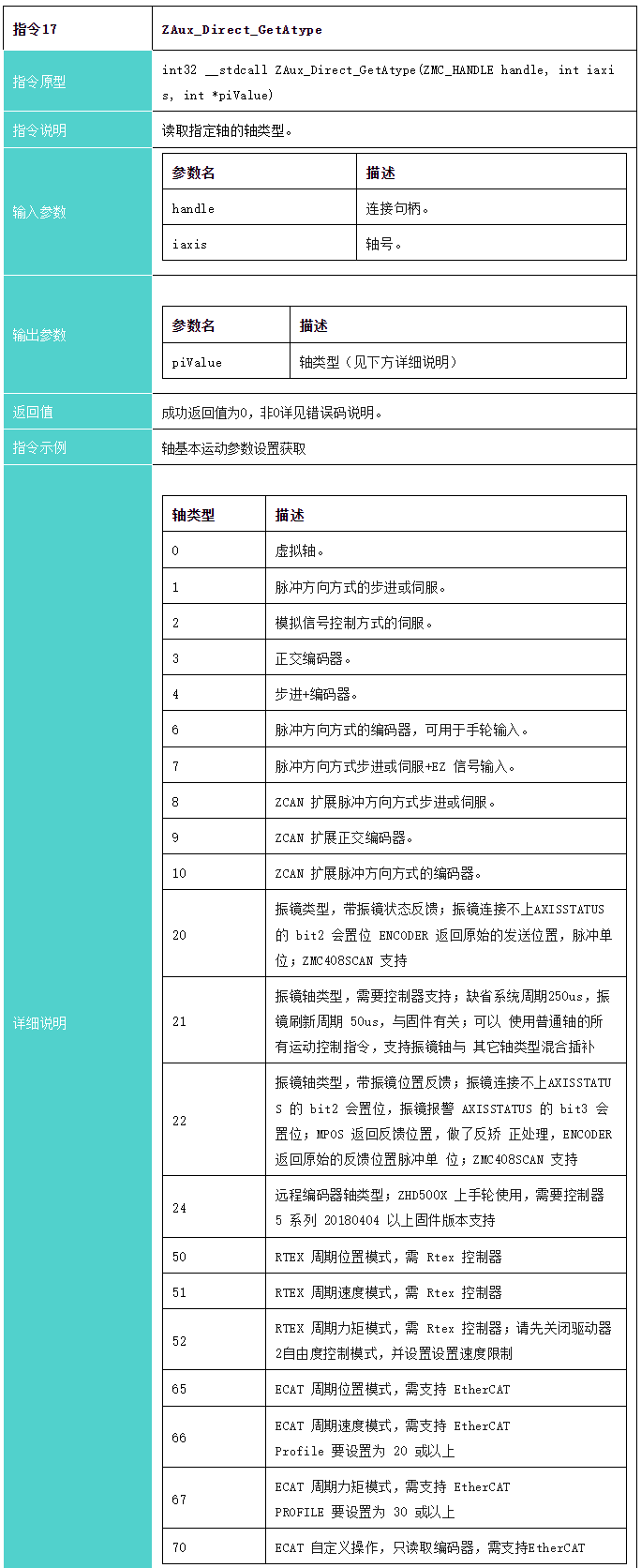
a.通過軸號讀取軸類型。
private void C_Move_Axis_TextChanged(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { return; } int ret = 0; int m_atype = 0; m_axisnum = Convert.ToInt32(C_Move_Axis.Text); ret += zmcaux.ZAux_Direct_GetAtype(g_handle, m_axisnum, ref m_atype); if (ret == 0) { C_AxisType.Text = m_atype.ToString(); } }
b.通過軸號設(shè)置軸類型。
private void button1_Click (object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
return;
}
int ret = 0;
int m_atype1 = 0;
m_atype1 = Convert.ToInt32(C_AxisType1.Text);
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
zmcaux.ZAux_Direct_SetAtype(g_handle, m_axisnum, m_atype1);
}
4、輸出口做脈沖配置
XPCIE032H板載4路單端脈沖輸出。(本例以采用OUT8和OUT9連接驅(qū)動器來說明)。首先按接線圖進行接線,接線完成后,因為OUT8為DIR3,OUT9為PUL3,對應(yīng)的脈沖驅(qū)動器軸號為3。 所以得通過上位機把軸3的軸類型設(shè)置為1(脈沖方向方式的步進或伺服)配置。
注意:驅(qū)動器根據(jù)規(guī)格可接E24V或E5V。
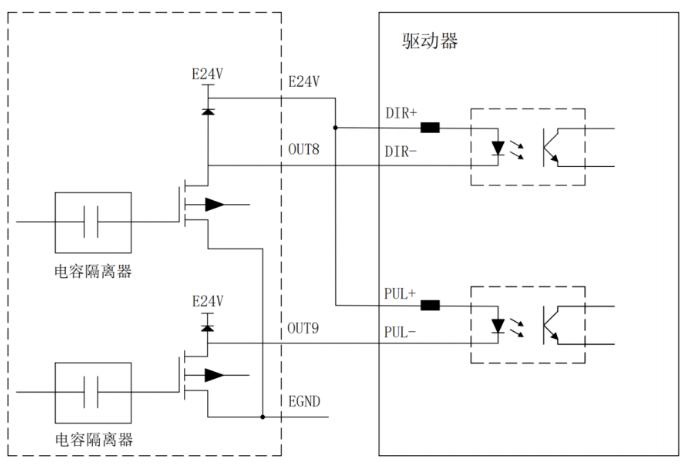
(1)配置流程圖如下。
(2)例程相關(guān)代碼。
a.通過軸號讀取軸類型。
private void C_Move_Axis_TextChanged(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
return;
}
int ret = 0;
int m_atype = 0;
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
ret += zmcaux.ZAux_Direct_GetAtype(g_handle, m_axisnum, ref m_atype);
if (ret == 0)
{
C_AxisType.Text = m_atype.ToString();
}
}
b.通過軸號設(shè)置軸類型。
private void button1_Click (object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
return;
}
int ret = 0;
int m_atype1 = 0;
m_atype1 = Convert.ToInt32(C_AxisType1.Text);
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
zmcaux.ZAux_Direct_SetAtype(g_handle, m_axisnum, m_atype1);
}
四、EtherCAT擴展的編碼器與脈沖配置
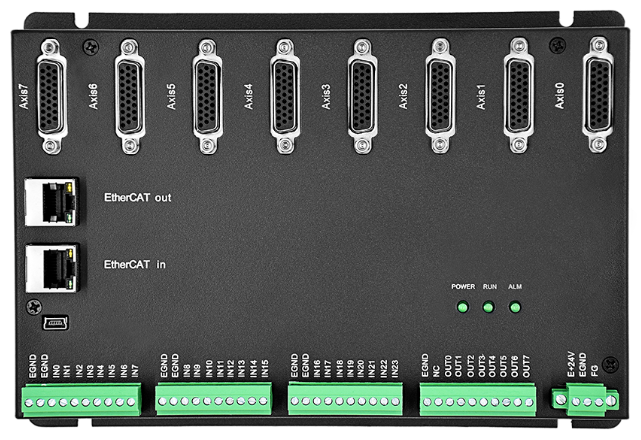
1、EIO16084擴展模塊
EIO16084擴展模塊是EtherCAT總線控制器使用的擴展模塊,可擴展數(shù)字量IO和脈沖軸這兩類資源,當(dāng)控制器本體上資源不夠的時候,EtherCAT總線控制器可連接多個EIO擴展模塊進行資源擴展,可查看控制器的IO最大擴展點數(shù)和最大擴展軸數(shù),支持IO的遠程擴展。
每個EIO擴展模塊在擴展接線完成后,不需要進行進行二次開發(fā),只需使用指令在EtherCAT主站控制器配置唯一的IO地址和軸地址,配置完成即可訪問。
IO地址編號通過總線指令NODE_IO來設(shè)置,控制器上程序只需通過IO編號就可以訪問到擴展模塊上的資源。軸地址的配置使用“AXIS_ADDRESS”指令映射綁定軸號,綁定完成通過BASE或AXIS指令指定軸號。
2、EIO24088擴展模塊
EIO24088總線擴展模塊是EtherCAT總線控制器使用的擴展模塊,當(dāng)數(shù)字 IO、脈沖軸資源不夠需要擴展增加的時候,控制器可通過EtherCAT總線連接多個 EtherCAT擴展模塊進行擴展。控制器可通過映射編號直接訪問EIO24088的IO資源和軸資源。
當(dāng)控制器的IO或軸資源不夠的時候,需要增加擴展模塊,控制器可以同時連接多個擴展模塊,EIO系列擴展模塊通過EtherCAT總線連接,每個擴展模塊有唯一的地址,從0開始。
EIO24088軸擴展時,為總線轉(zhuǎn)脈沖,將脈沖型驅(qū)動器接入到EIO24088擴展模塊上的脈沖軸接口上。EIO24088帶兩個EtherCAT總線接口,接線時注意EtherCAT IN連接主控制器或上級模塊,EtherCAT OUT連接驅(qū)動設(shè)備或下一級擴展板,IN和OUT口不可混用。
注意: EIO系列帶軸的擴展模塊的使用方法相同,僅是擴展資源數(shù)量的區(qū)別。下面以EIO16084擴展模塊為例,來對EIO系列擴展模塊進行使用說明。
3、EtherCAT擴展模塊接線參考
EIO16084數(shù)字量擴展模塊為單電源供電,主電源就可以給IO供電,主電源采用24V直流電源。EIO16084擴展模塊在擴展接線完成后,不需要進行進行二次開發(fā),只需手動在 EtherCAT主站控制器配置唯一的IO地址,配置完成即可訪問。IO地址編號通過總線指令NODE_IO來設(shè)置,控制器上程序只需通過IO編號就可以訪問到擴展模塊上的資源。接線時注意EtherCAT IN連接上一級模塊,EtherCAT OUT連接下一級模塊,IN 和OUT口不可混用。
EIO擴展模塊接線參考示例(以ZMC432舉例)。
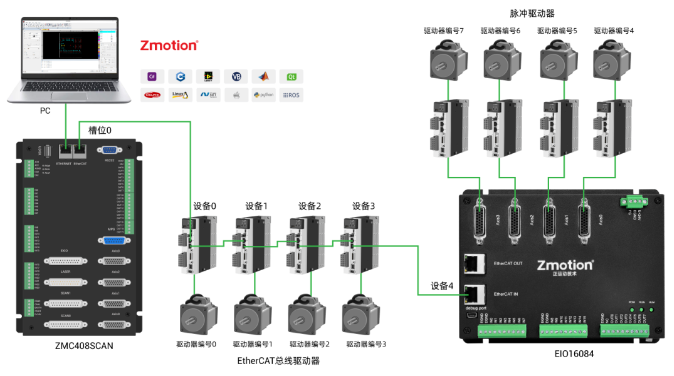
上圖涉及的編號概念如下: 總線相關(guān)指令參數(shù)會用到如下編號。
(1)槽位號(slot)
槽位號是指控制器上總線接口的編號,EtherCAT總線槽位號為0。
(2)設(shè)備號(node)
設(shè)備號是指一個槽位上連接的所有設(shè)備的編號,從0開始,按設(shè)備在總線上的連接順序自動編號,可以通過“NODE_COUNT(slot)”指令查看總線上連接的設(shè)備總數(shù)。
(3)驅(qū)動器編號
控制器會自動識別出槽位上的驅(qū)動器,編號從0開始,按驅(qū)動器在總線上的連接順序自動編號。驅(qū)動器編號與設(shè)備號不同,只給槽位上的驅(qū)動器設(shè)備編號,其他設(shè)備忽略,映射軸號時將會用到驅(qū)動器編號。
4、EIO16084接口規(guī)格
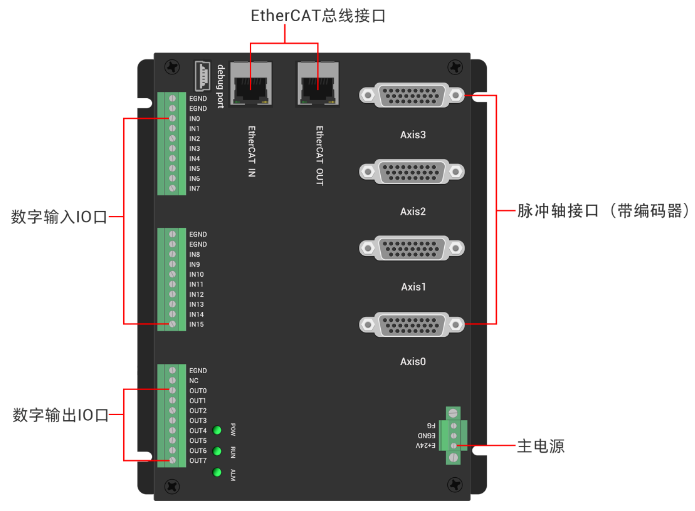
接口說明如下表:

由上表可知脈沖軸接口可配置為差分脈沖輸出和差分編碼器輸入。
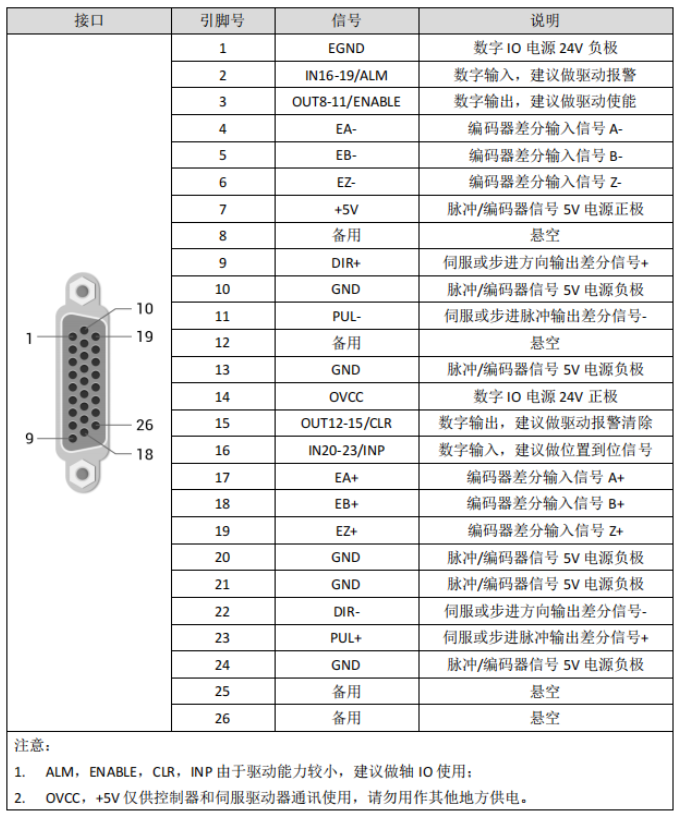
5、脈沖軸接口
EIO16084提供4個本地差分脈沖軸接口,每個接口為標(biāo)準(zhǔn)DB26母座。
注意:
如果4個本地差分脈沖軸接口還不能滿足使用需求,可以把EIO16084更換為EIO24088。EIO24088提供8個本地差分脈沖軸接口,每個接口為標(biāo)準(zhǔn)DB26母座。
接口定義如下。
6、軸接口配置為編碼器
(1)接線參考
與長春凱爾科技,2500線增量式編碼器接線參考示例:

接好線后,還要通過上位機的數(shù)據(jù)字典寫入來配置總線軸的真實軸類型。真實軸類型設(shè)置是由數(shù)據(jù)字典6011h配置。( 參考下表的參數(shù),按軸號依次設(shè)置,第一個驅(qū)動器設(shè)置數(shù)據(jù)字典6011h+0*800h,第二個驅(qū)動器設(shè)置6011h+1*800h,以此類推,每個驅(qū)動器加800h,其他參數(shù)同理)。
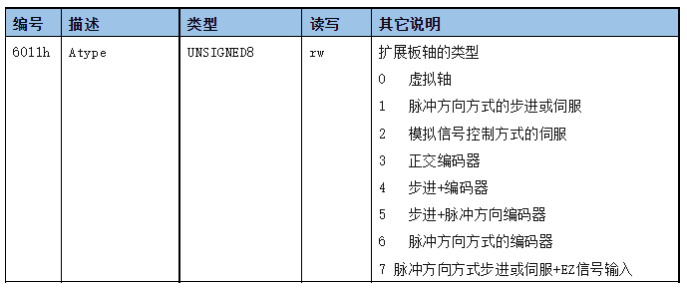
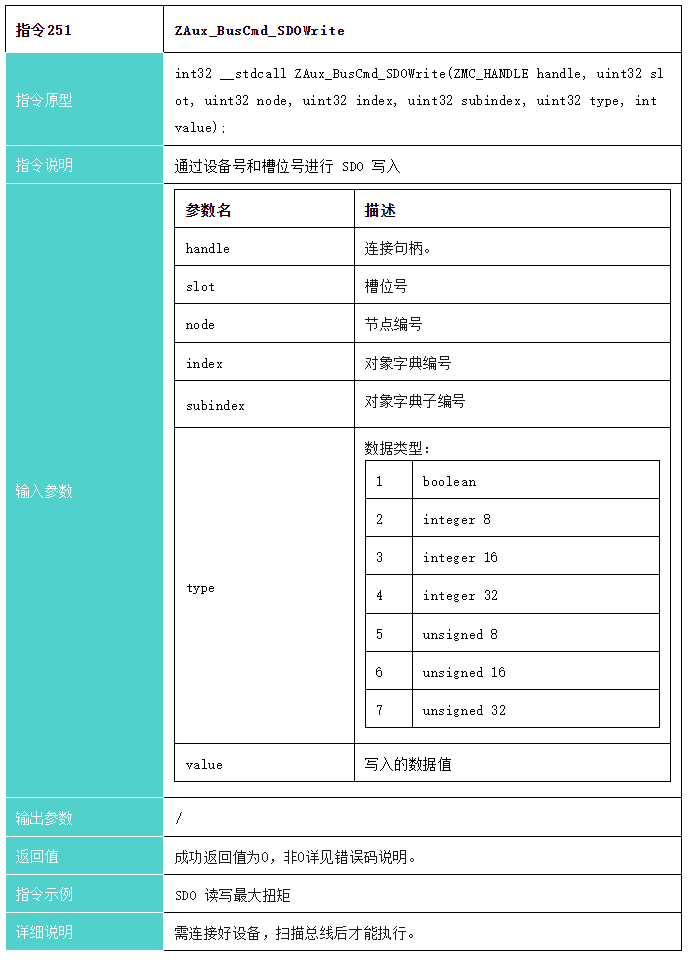
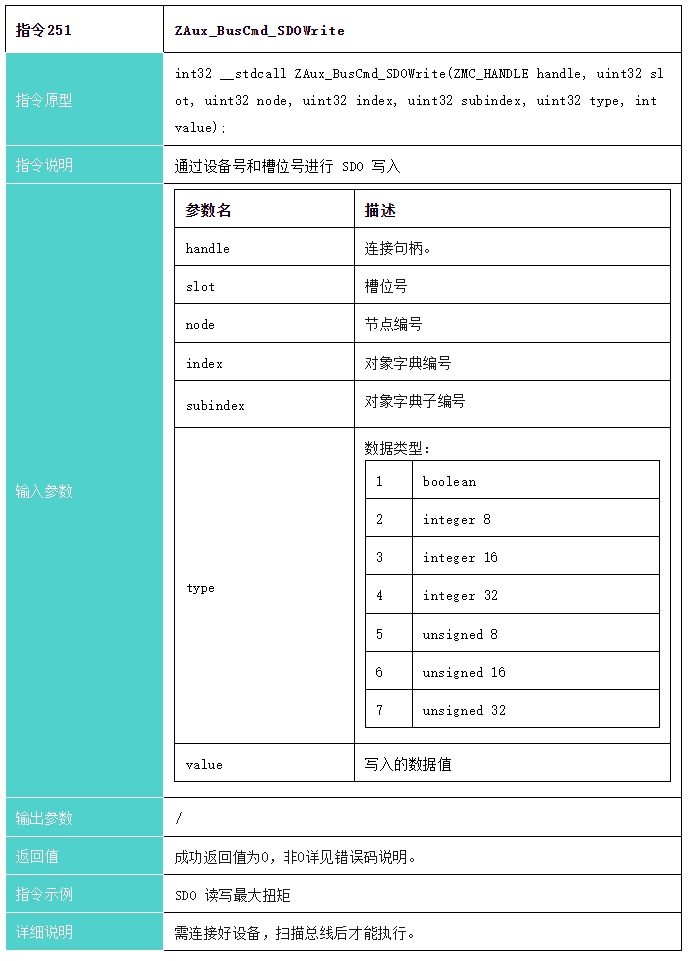
上位機的數(shù)據(jù)字典寫入:ZAux_BusCmd_SDOWrite(連接句柄,槽位號,節(jié)點編號,對象字典編號,對象字典子編號,數(shù)據(jù)類型,寫入的數(shù)據(jù)值)。
(2)例程相關(guān)代碼
通過設(shè)備號和槽位號進行SDO寫入。
private void C_Sdo_Write_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
uint m_sdo_node1 = Convert.ToUInt32(C_SdoNode0.Text);
uint m_sdo_index1 = Convert.ToUInt32(C_SdoReg0.Text);
uint m_sdo_sub1 = Convert.ToUInt32(C_SdoIsub0.Text);
uint m_sdo_type1 = Convert.ToUInt32(C_SdoType0.SelectedIndex.ToString()) + 1;
int m_sdo_data1 = Convert.ToInt32(C_Sdodata0.Text);
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDOWrite(g_handle, 0, m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1);
if (ret != 0)
{
MessageBox.Show("寫入失敗");
return;
}
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
}
7、軸接口配置為脈沖軸
(1)接線參考
與松下A5/A6伺服驅(qū)動器接線參考示例:
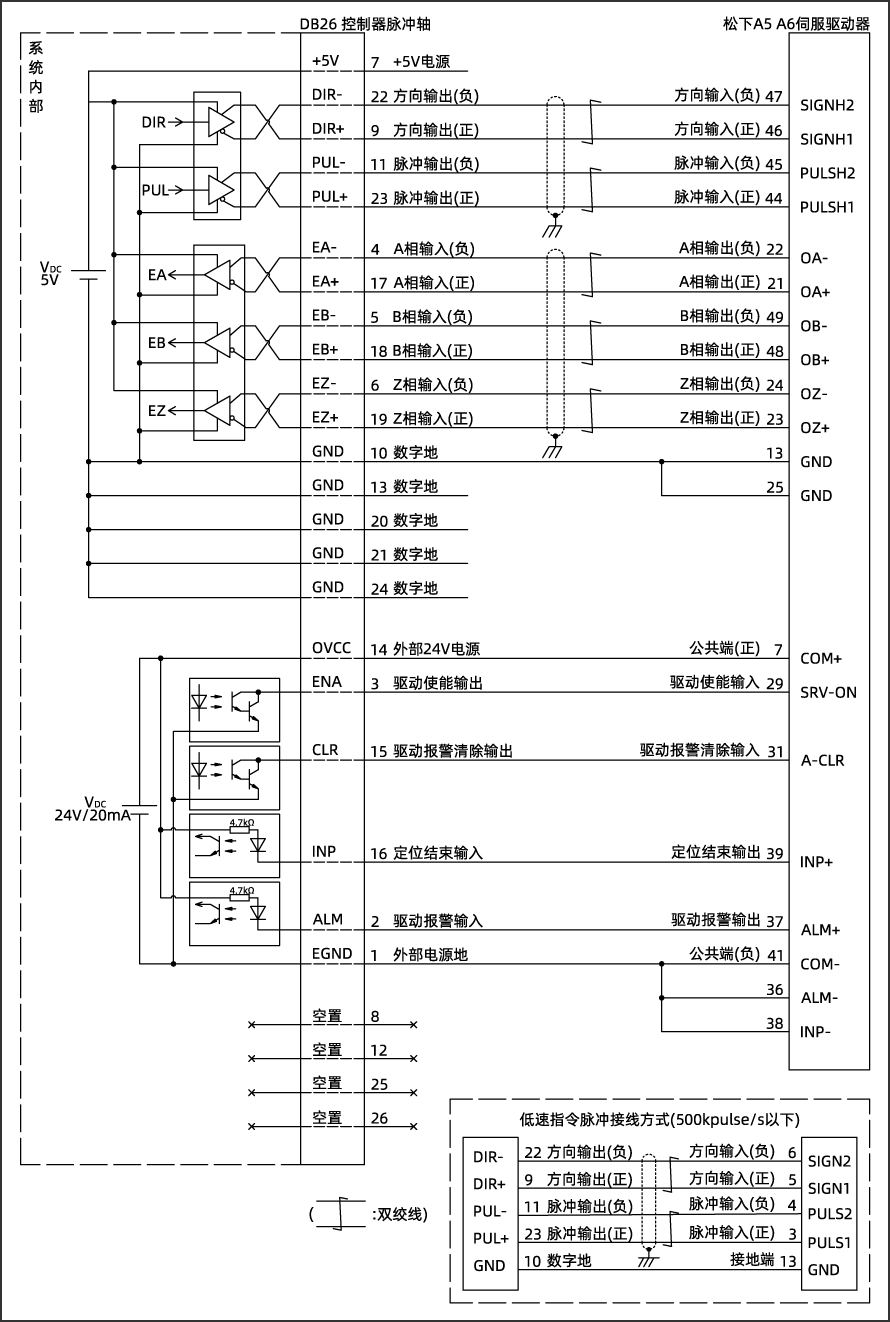
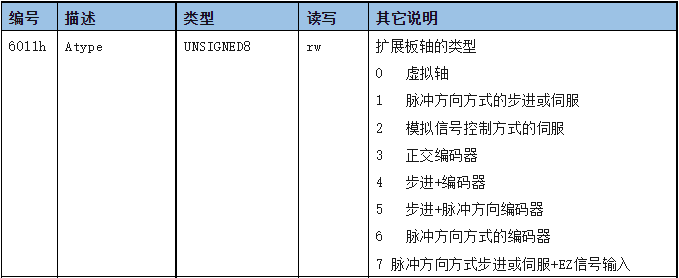
接好線后,還要通過PC函數(shù)庫的數(shù)據(jù)字典寫入接口來配置總線軸的真實軸類型。真實軸類型設(shè)置是由數(shù)據(jù)字典6011h配置。(參考下表的參數(shù),按軸號依次設(shè)置,第一個驅(qū)動器設(shè)置數(shù)據(jù)字典6011h+0*800h,第二個驅(qū)動器設(shè)置6011h+1*800h,以此類推,每個驅(qū)動器加800h,其他參數(shù)同理)。
PC函數(shù)庫的數(shù)據(jù)字典寫入接口: ZAux_BusCmd_SDOWrite(連接句柄,槽位號,節(jié)點編號,對象字典編號,對象字典子編號,數(shù)據(jù)類型,寫入的數(shù)據(jù)值)。
(2)例程相關(guān)代碼
通過設(shè)備號和槽位號進行SDO寫入。
private void C_Sdo_Write_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
uint m_sdo_node1 = Convert.ToUInt32(C_SdoNode0.Text);
uint m_sdo_index1 = Convert.ToUInt32(C_SdoReg0.Text);
uint m_sdo_sub1 = Convert.ToUInt32(C_SdoIsub0.Text);
uint m_sdo_type1 = Convert.ToUInt32(C_SdoType0.SelectedIndex.ToString()) + 1;
int m_sdo_data1 = Convert.ToInt32(C_Sdodata0.Text);
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDOWrite(g_handle, 0, m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1);
if (ret != 0)
{
MessageBox.Show("寫入失敗");
return;
}
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
五、例程說明
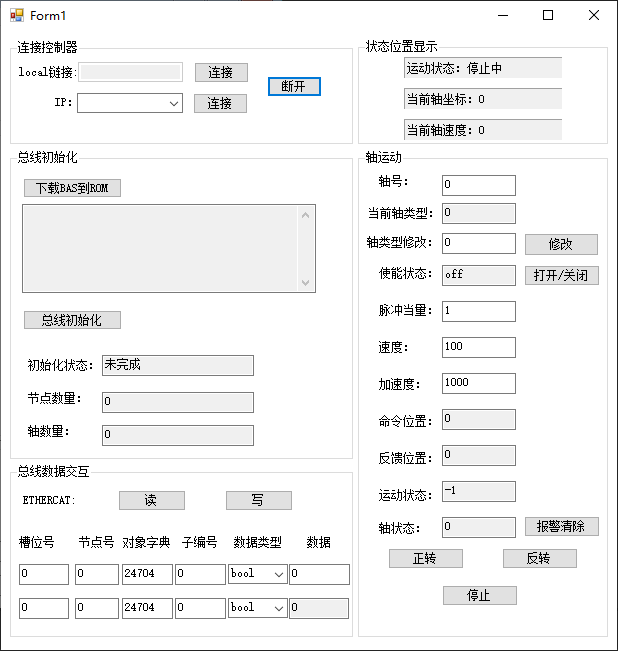
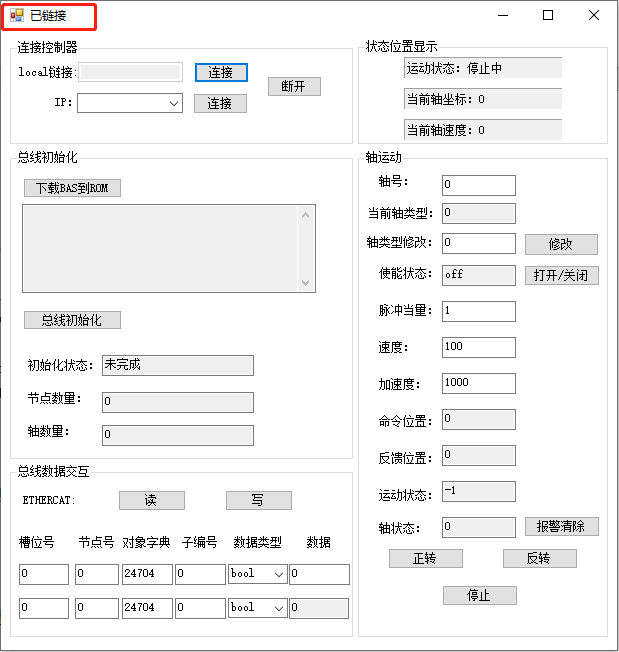
1、 C#例程界面如下。
2、例程簡易流程圖。
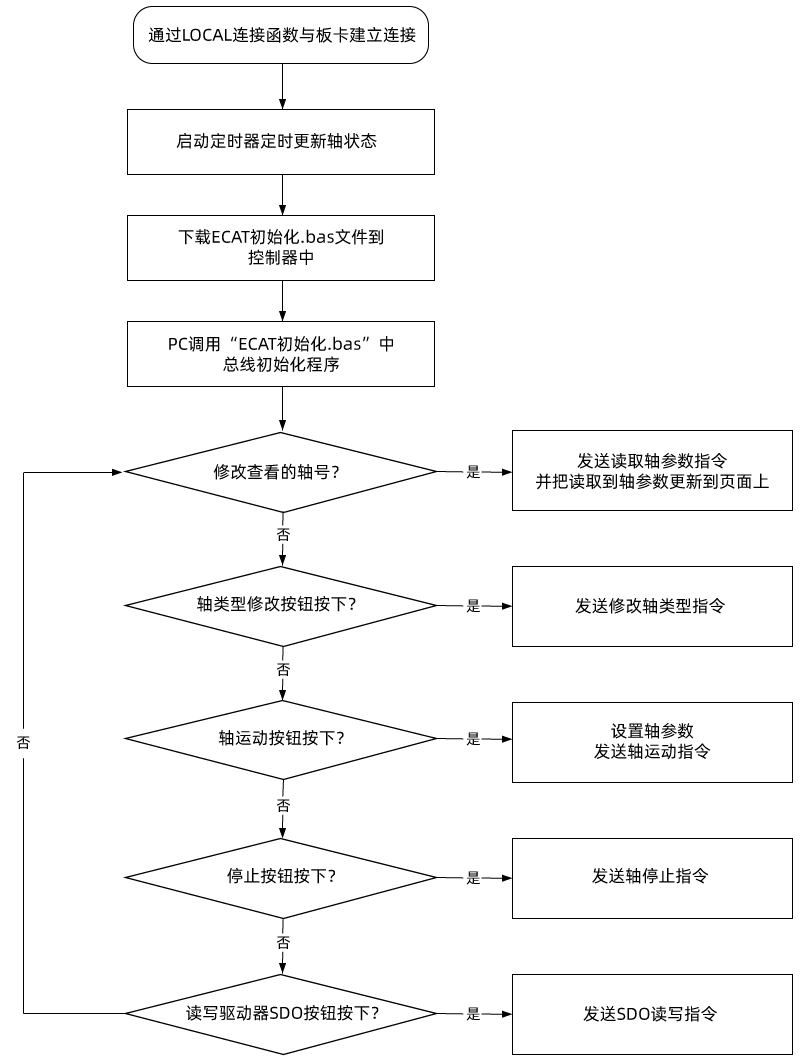
3、要想通過上位機操控控制器,就必須先鏈接控制器。例如通過LOCAL鏈接方式的鏈接按鈕的消息響應(yīng)函數(shù)來鏈接控制器。
通過LOCAL鏈接方式的鏈接控制器。
private void button4_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
C_Close_Card_Click(sender, e);
}
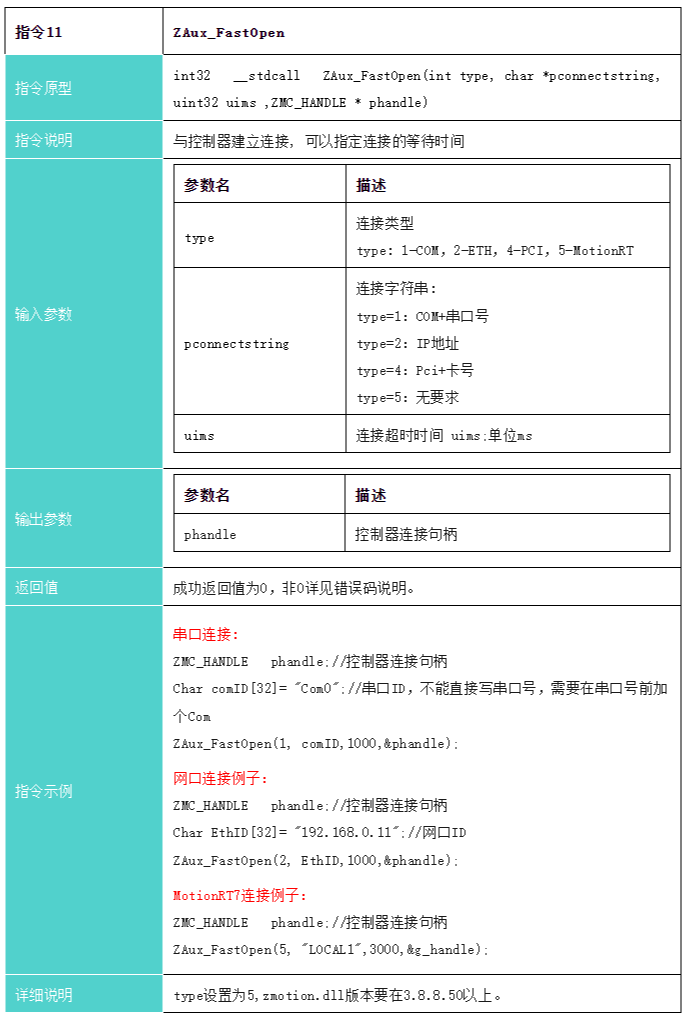
zmcaux.ZAux_FastOpen(5, comboBox1.Text, 1000, out g_handle);
if (g_handle != (IntPtr)0)
{
this.Text = "已鏈接";
timer1.Enabled = true;
}
else
{
MessageBox.Show("鏈接失敗,請選擇正確的LOCAL!");
}
}
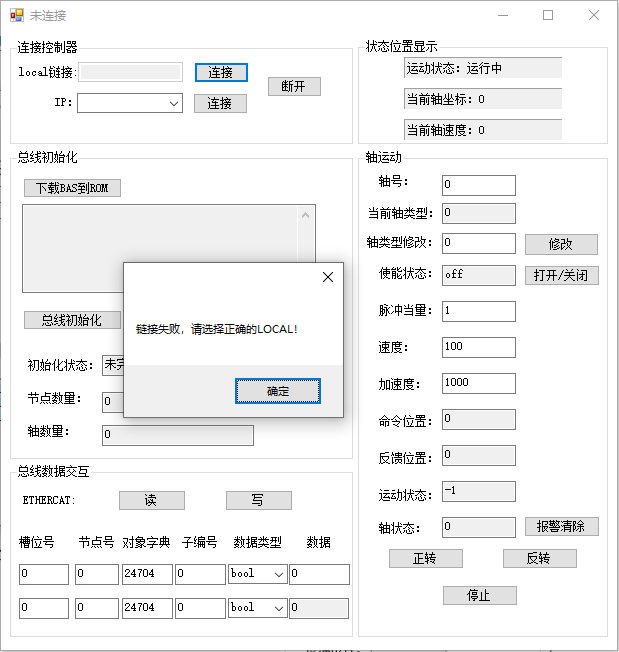
鏈接成功后,例程左上角會顯示已鏈接。如果鏈接失敗,還彈出“鏈接失敗,請選擇正確的LOCAL!”的彈窗。
4、EtherCAT總線初始化。先將EtherCAT總線初始化程序下載到控制器中,PC再調(diào)用下面的總線初始化函數(shù),即可完成總線初始化。
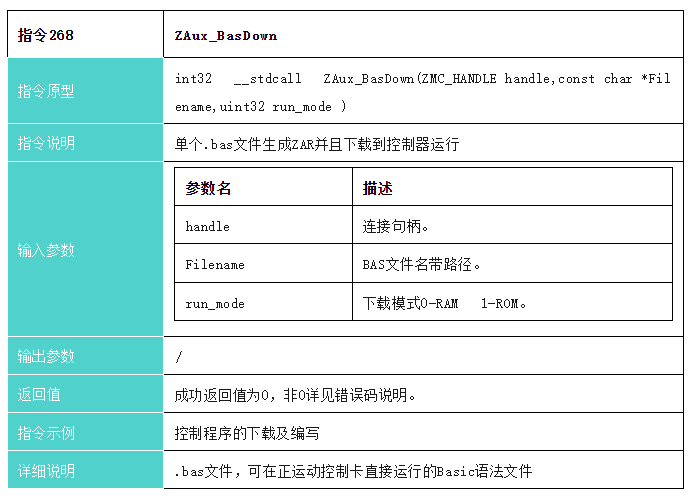
PC函數(shù)庫中的“單個.bas文件生成ZAR并且下載到控制器運行”接口:ZAux_BasDown(連接句柄,BAS文件名帶路徑,下載模式)。
單個.bas文件生成ZAR并且下載到控制器運行。
private void C_Download_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
}
else
{
int ret = 0;
string strFilePath;
OpenFileDialog openFileDialog1 = new OpenFileDialog();
openFileDialog1.InitialDirectory = "";
openFileDialog1.Filter = "配置文件(*.bas)|*.bas";
openFileDialog1.RestoreDirectory = true;
openFileDialog1.FilterIndex = 1;
if (openFileDialog1.ShowDialog() == DialogResult.OK) //打開配置文件
{
strFilePath = openFileDialog1.FileName;
C_BasFile.Text = strFilePath;
ret = zmcaux.ZAux_BasDown(g_handle, strFilePath, 1); //下載到ROM
if (ret != 0)
{
MessageBox.Show("文件下載失敗!", "提示");
}
g_InitStatus = -1;
g_basflag = true;
}
}
}
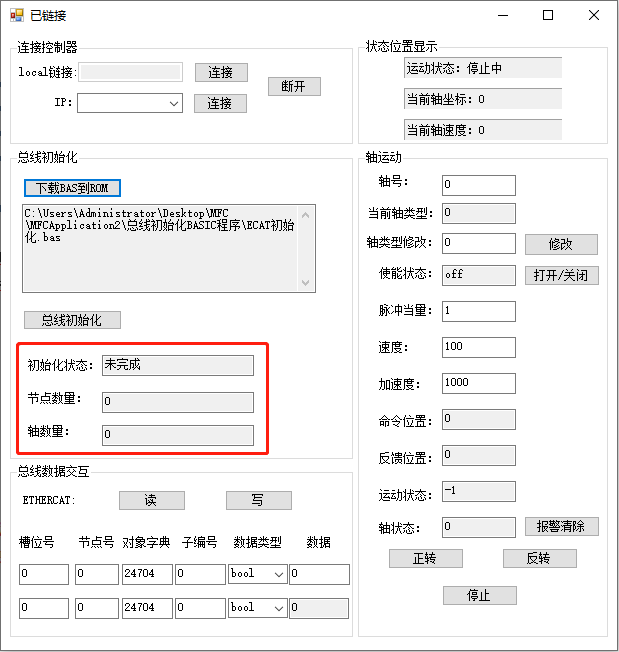
如果總線初始化還沒有成功,例程的初始化狀態(tài)就會顯示未完成,節(jié)點數(shù)量和軸數(shù)量都會顯示0。總線初始化成功后,例程的初始化狀態(tài)就會顯示初始化完成。并顯示節(jié)點數(shù)量和軸數(shù)量。
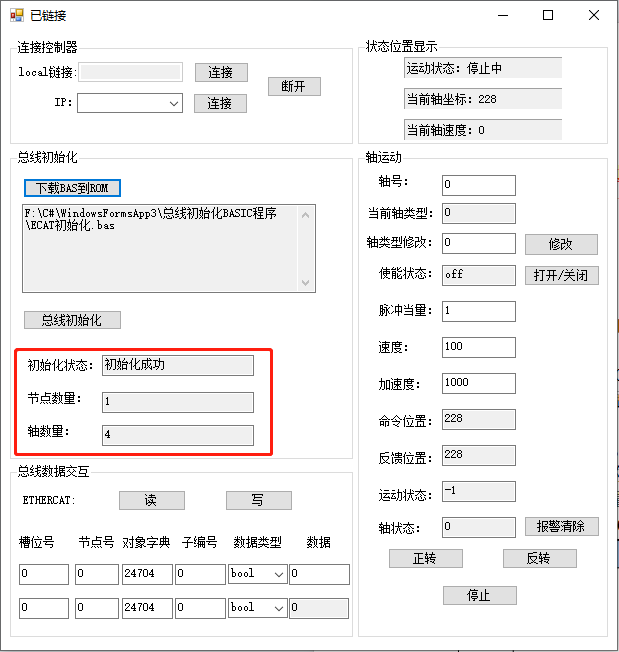
注意:初始化過程中若產(chǎn)生硬限位報警,可在軸參數(shù)窗口將硬限位FWD_IN和REV_IN的映射編號指向-1,表示不映射,需要接入限位開關(guān)時再去修改FWD_IN和REV_IN。
5、設(shè)置查看的軸號。就是修改全局變量m_axisnum,并且使用修改后的全局變量m_axisnum去讀取軸參數(shù),然后把軸參數(shù)顯示在例程上。
private void C_Move_Axis_TextChanged(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
return;
}
int ret = 0;
float[] f_AxisPara = new float[10];
int m_atype = 0;
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
ret += zmcaux.ZAux_Direct_GetUnits(g_handle, m_axisnum, ref f_AxisPara[0]);
ret += zmcaux.ZAux_Direct_GetSpeed(g_handle, m_axisnum, ref f_AxisPara[1]);
ret += zmcaux.ZAux_Direct_GetAccel(g_handle, m_axisnum, ref f_AxisPara[2]);
ret += zmcaux.ZAux_Direct_GetAtype(g_handle, m_axisnum, ref m_atype);
if (ret == 0)
{
C_AxisType.Text = m_atype.ToString();
C_AxisUnits.Text = f_AxisPara[0].ToString();
C_AxisSpeed.Text = f_AxisPara[1].ToString();
C_AxisAcc.Text = f_AxisPara[2].ToString();
}
}
6、修改軸類型是使用PC函數(shù)庫中的設(shè)置軸類型接口:ZAux_Direct_SetAtype(控制器連接句柄,軸號,軸類型)。
private void button1_Click (object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
return;
}
int ret = 0;
int m_atype1 = 0;
m_atype1 = Convert.ToInt32(C_AxisType1.Text);
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
zmcaux.ZAux_Direct_SetAtype(g_handle, m_axisnum, m_atype1);
}
7、軸運動和停止。正轉(zhuǎn)和反轉(zhuǎn)是使用了PC函數(shù)庫中的單軸持續(xù)運動接口:ZAux_Direct_Single_Vmove(控制器連接句柄,軸號,方向)。停止是使用了PC函數(shù)庫中的單軸運動停止接口:ZAux_Direct_Single_Cancel(控制器連接句柄,軸號,模式)。
a.單軸持續(xù)運動。
private void C_Button_Fwd_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
ret=zmcaux.ZAux_Direct_SetUnits(g_handle,m_axisnum,Convert.ToSingle(C_AxisUnits.Text));
ret=zmcaux.ZAux_Direct_SetSpeed(g_handle,m_axisnum,Convert.ToSingle(C_AxisSpeed.Text));
ret=zmcaux.ZAux_Direct_SetAccel(g_handle,m_axisnum,Convert.ToSingle(C_AxisAcc.Text));
ret = zmcaux.ZAux_Direct_Single_Vmove(g_handle, m_axisnum, 1);
}
b.單軸運動停止。
private void C_Button_Stop_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
ret = zmcaux.ZAux_Direct_Single_Cancel(g_handle, m_axisnum, 2);
}
8、讀取和設(shè)置擴展的脈沖軸的真實軸類型。
總線初始化后,拓展的總線軸的軸類型為65(EtherCAT周期位置模式),但實際由于是脈沖型驅(qū)動器,軸類型并不是65,真實軸類型的讀取和配置需要使用PC函數(shù)庫的數(shù)據(jù)字典讀取和寫入接口。擴展的脈沖軸的真實軸類型設(shè)置通過數(shù)據(jù)字典6011h設(shè)置,(參考下表的參數(shù),按軸號依次設(shè)置,第一個驅(qū)動器設(shè)置數(shù)據(jù)字典6011h+0*800h,第二個驅(qū)動器設(shè)置6011h+1*800h,以此類推,每個驅(qū)動器加800h,其他參數(shù)同理)。
(1)PC函數(shù)庫中的數(shù)據(jù)字典讀取的接口:
ZAux_BusCmd_SDORead(連接句柄,槽位號,節(jié)點編號,對象字典編號,對象字典子編號,數(shù)據(jù)類型,讀取的數(shù)據(jù)值)。
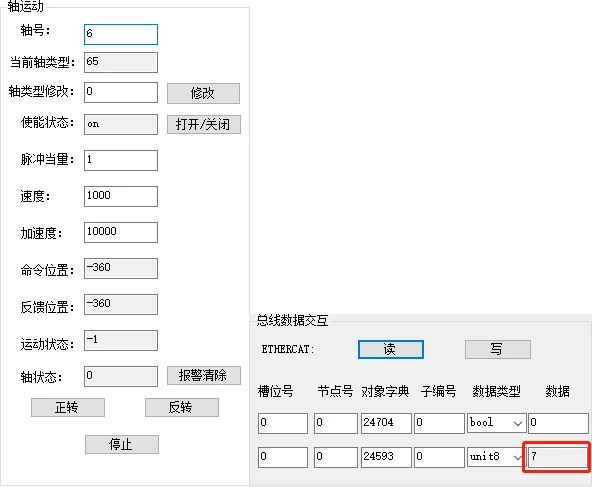
例如:下圖中的6和7軸的軸類型都顯示65(EtherCAT周期位置模式),但是通過使用PC函數(shù)庫中的數(shù)據(jù)字典讀取的接口來讀取6011h和6011h+1*800h,得知6軸和7軸的真實軸類型并不一樣。
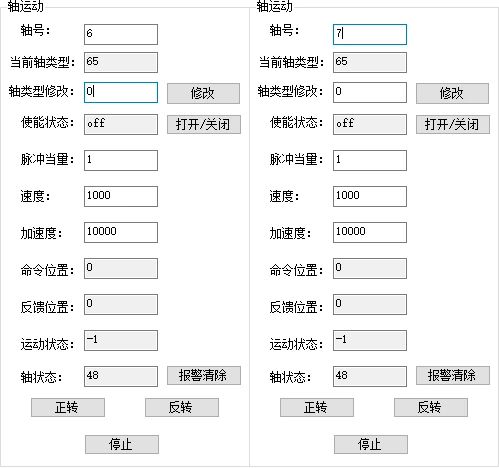
a.軸6。 注意:24593是由16進制的6011h轉(zhuǎn)換成10進制得來的。
b.軸7。注意 : 26641是由16進制的6011h+1*800h轉(zhuǎn)換成10進制得來的。
軸6的真實軸類型是7(脈沖方向方式步進或伺服+EZ信號輸入),軸7的真實軸類型是0(虛擬軸)。
通過設(shè)備號和槽位號進行SDO讀取。
private void C_Sdo_Read_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
uint m_sdo_node2 = Convert.ToUInt32(C_SdoNode1.Text);
uint m_sdo_index2 = Convert.ToUInt32(C_SdoReg1.Text);
uint m_sdo_sub2 = Convert.ToUInt32(C_SdoIsub1.Text);
uint m_sdo_type2 = Convert.ToUInt32(C_SdoType1.SelectedIndex.ToString()) + 1;
int m_sdo_data2 = 0;
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDORead(g_handle, 0, m_sdo_node2, m_sdo_index2, m_sdo_sub2, m_sdo_type2, ref m_sdo_data2);
if (ret != 0)
{
MessageBox.Show("讀取失敗");
return;
}
C_Sdodata1.Text = m_sdo_data2.ToString();
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
}
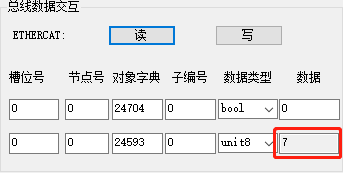
(2)PC函數(shù)庫中的數(shù)據(jù)字典寫入的接口:
ZAux_BusCmd_SDOWrite(連接句柄,槽位號,節(jié)點編號,對象字典編號,對象字典子編號,數(shù)據(jù)類型,寫入的數(shù)據(jù)值)。
例如:下圖是6軸的軸參數(shù)和使用PC函數(shù)庫中的數(shù)據(jù)字典讀取的接口來讀取6011h得知的真實軸類型。
注意:24593是由16進制的6011h轉(zhuǎn)換成10進制得來的。從圖得知軸6的真實軸類型是7( 脈沖方向方式步進或伺服+EZ信號輸入 ),所以命令位置和反饋位置是一樣的。接下來我們將要使用PC函數(shù)庫中的數(shù)據(jù)字典寫入的接口把軸6的真實軸類型修改為4(脈沖方向輸出+正交編碼器輸入)。
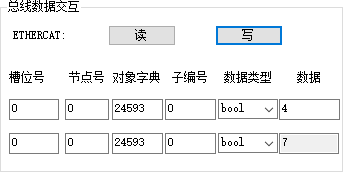
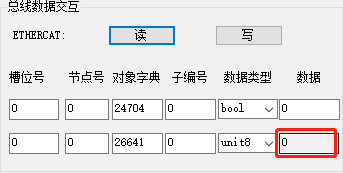
寫入后重新讀取真實軸類型。
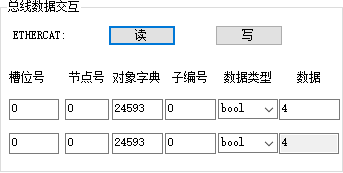
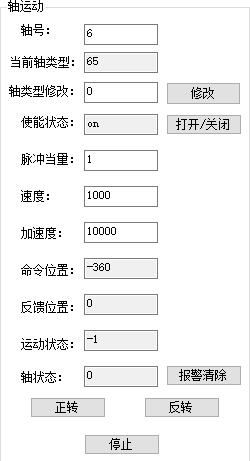
發(fā)現(xiàn)真實軸類型已經(jīng)修改為4(脈沖方向輸出+正交編碼器輸入)了。再看看軸6的參數(shù),會發(fā)現(xiàn)命令位置和反饋位置不一樣了,那是因為軸6沒接編碼器,所以 反饋位置變?yōu)榱?。
通過設(shè)備號和槽位號進行SDO寫入。
private void C_Sdo_Write_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
uint m_sdo_node1 = Convert.ToUInt32(C_SdoNode0.Text);
uint m_sdo_index1 = Convert.ToUInt32(C_SdoReg0.Text);
uint m_sdo_sub1 = Convert.ToUInt32(C_SdoIsub0.Text);
uint m_sdo_type1 = Convert.ToUInt32(C_SdoType0.SelectedIndex.ToString()) + 1;
int m_sdo_data1 = Convert.ToInt32(C_Sdodata0.Text);
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDOWrite(g_handle, 0, m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1);
if (ret != 0)
{
MessageBox.Show("寫入失敗");
return;
}
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
}
本次,正運動技術(shù)EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(四) :板載IO與總線擴展IO的編碼器與脈沖配置的應(yīng)用,就 分享到這里。更多精彩內(nèi)容請關(guān)注“ 正運動小助手 ”公眾號。
本文由正運動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
正運動技術(shù)專注于運動控制技術(shù)研究和通用運動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運動控制核心技術(shù)和實時工控軟件平臺技術(shù)的企業(yè)。主要業(yè)務(wù)有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統(tǒng)_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯:湯梓紅
-
運動控制器
+關(guān)注
關(guān)注
2文章
408瀏覽量
24804 -
上位機
+關(guān)注
關(guān)注
27文章
945瀏覽量
54986 -
ethercat
+關(guān)注
關(guān)注
18文章
732瀏覽量
38866
發(fā)布評論請先 登錄
相關(guān)推薦
EtherCAT運動控制卡XPCIE1032H上位機開發(fā)(一):驅(qū)動安裝

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(十三)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(十四)

PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應(yīng)用

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(二):EtherCAT總線初始化
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(三):EtherCAT總線模式切換
超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(四):板載IO與總線擴展IO的編碼器與脈沖配置的應(yīng)用
PT/PVT運動模式介紹:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#人工智能
XPCIE1028超高速實時運動控制卡簡介和應(yīng)用案例

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(一):驅(qū)動安裝與建立連接
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(二):EtherCAT總線初始化
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論