 自動駕駛坐標變換意義與類型
自動駕駛坐標變換意義與類型
自動駕駛的關鍵挑戰之一是準確感知和解釋車輛周圍環境的能力。這需要使用各種傳感器,如相機、激光雷達和雷達,來捕捉周圍環境的數據。
然而,這些傳感器捕獲的數據通常位于與車輛自身坐標系不同的坐標系中。這意味著必須將數據轉換到車輛的坐標系中,以便對導航和控制有用。
上面提到的BEV感知,通過視覺算法我們可以在每一幀都提取出特征點。如果在時間序列上,我們想利用這些特征點,我們就無法避免的要使用坐標變換了。
自動駕駛中常用的坐標變換有幾種類型,包括:
1. 平移
平移包括在同一坐標系中將對象從一個位置移動到另一個位置。在自動駕駛中,平移通常用于對齊激光雷達和相機等不同傳感器捕獲的數據,使它們處于同一坐標系中。
2. 旋轉
旋轉包括圍繞同一坐標系中的固定點旋轉對象。在自動駕駛中,旋轉通常用于對齊安裝在車輛上不同角度的傳感器捕獲的數據。
3. 齊次變換
齊次變換包括將平移和旋轉組合成單個變換矩陣。在自動駕駛中我們會用到齊次變換,將數據從傳感器坐標系轉換到車輛坐標系。
為了執行這些坐標變換,使用了各種數學技術,如矩陣乘法和四元數旋轉。這些技術是在軟件庫中實現的,例如C++的Egengen庫和Python的NumPy庫。
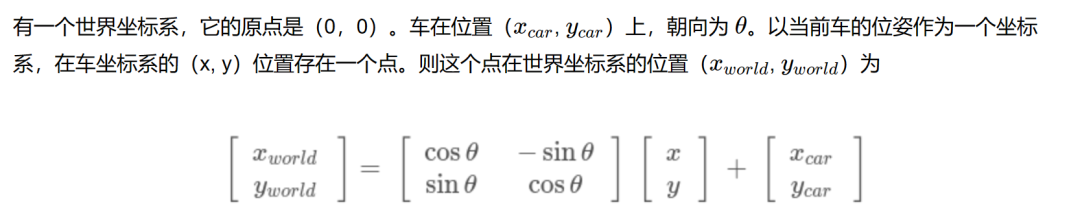
二維數據坐標變換的常見場景
情況1
情況2


python代碼
寫一個python代碼,來驗證坐標變換
import matplotlib.pyplot as plt
plt.title('Calibration')
plt.xlabel('x (m)')
plt.ylabel('y (m)')
plt.axis('equal')
# 坐標軸長度
coord_length = 0.2
# 兩個車輛位姿
x1 = 1
y1 = 4
theta1 = 0.1
print("car pose1: ["+str(x1), ", "+str(y1) + ", "+str(theta1)+"]")
x2 = 3
y2 = 5
theta2 = 1.3
print("car pose2: ["+str(x2), ", "+str(y2) + ", "+str(theta2)+"]")
# 位姿1下有一個點p
x = 2
y = 1
print("["+str(x), ", "+str(y) + "] in pose1")
# 畫位姿1的坐標軸
x_cord = math.cos(theta1) * coord_length + x1
y_cord = math.sin(theta1) * coord_length + y1
plt.plot([x1, x_cord], [y1, y_cord], 'r')
x_cord = math.cos(theta1 + math.pi/2) * coord_length + x1
y_cord = math.sin(theta1 + math.pi/2) * coord_length + y1
plt.plot([x1, x_cord], [y1, y_cord], 'b')
# 畫位姿2的坐標軸
x_cord = math.cos(theta2) * coord_length + x2
y_cord = math.sin(theta2) * coord_length + y2
plt.plot([x2, x_cord], [y2, y_cord], 'r')
x_cord = math.cos(theta2 + math.pi/2) * coord_length + x2
y_cord = math.sin(theta2 + math.pi/2) * coord_length + y2
plt.plot([x2, x_cord], [y2, y_cord], 'b')
# p點在世界坐標系下的位置
x_world = math.cos(theta1) * x - math.sin(theta1) * y + x1
y_world = math.sin(theta1) * x + math.cos(theta1) * y + y1
print("["+str(x_world), ", "+str(y_world) + "] in world")
plt.plot(x_world, y_world, 'r*')
# p點在位姿2下的位置
x_ = math.cos(theta2) * (x_world-x2) + math.sin(theta2) * (y_world-y2)
y_ = -math.sin(theta2) * (x_world-x2) + math.cos(theta2) * (y_world-y2)
print("["+str(x_), ", "+str(y_) + "] in pose2")
# 用計算出來的p點位姿2下的位置,來再算出在世界坐標系下的位置
x_world_ = math.cos(theta2) * x_ - math.sin(theta2) * y_ + x2
y_world_ = math.sin(theta2) * x_ + math.cos(theta2) * y_ + y2
print("use 2 to check ["+str(x_world_), ", "+str(y_world_) + "]")
plt.plot(x_world_, y_world_, 'b*')
plt.show()
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2552文章
51366瀏覽量
755731 -
車輛
+關注
關注
0文章
83瀏覽量
15194 -
自動駕駛
+關注
關注
784文章
13922瀏覽量
166798
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
FPGA(Field-Programmable Gate Array,現場可編程門陣列)在自動駕駛領域具有廣泛的應用,其高性能、可配置性、低功耗和低延遲等特點為自動駕駛的實現提供了強有力的支持。以下
發表于 07-29 17:09
FPGA在自動駕駛領域有哪些優勢?
FPGA(Field-Programmable Gate Array,現場可編程門陣列)在自動駕駛領域具有顯著的優勢,這些優勢使得FPGA成為自動駕駛技術中不可或缺的一部分。以下是FPGA在自動駕駛
發表于 07-29 17:11
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
`特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?“一個致命的事故一定是由多個小的錯誤組成的。” 7月初,特斯拉發表博客敘述了NHTSA(美國國家公路交通安全管理局)正在著手調查第一起Tesla
發表于 07-05 11:14
自動駕駛真的會來嗎?
自動駕駛原理示意GIF圖 特斯拉自動駕駛死亡事故給全世界帶來了極大的震驚,但這并不意味著基于壞消息之上的關注全然沒有正面意義。 在接受新浪科技采訪中,多位硅谷相關人士告訴新浪科技:一方面是對于
發表于 07-21 09:00
細說關于自動駕駛那些事兒
`事實上,早在1925年就出現第一臺自動駕駛概念車,但為什么直至最近無人車才不再被視為科幻小說,而是眼下將實現的革命性科技產品?追其原因,主要在于,人工智能的顯著進展,以及開發無人車的所需技術和硬件
發表于 05-15 17:49
自動駕駛的到來
傳統汽車廠商更趨向于通過技術的不斷積累,場景的不斷豐富,逐步從輔助駕駛過渡到半自動駕駛,進而在將來最終實現無人駕駛;某些高科技公司則希望通過各種外部傳感器實時采集海量數據,處理器經過數據分析然后
發表于 06-08 15:25
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
由南德意志出版及活動有限公司舉辦的 國際AI自動駕駛高峰論壇 將于 2017年11月28/29日 在 德國慕尼黑 舉辦,中德聯合股份公司作為中國獨家合作伙伴,誠邀您撥冗蒞臨!【活動背景】AI
發表于 09-13 13:59
自動駕駛汽車的定位技術
自動駕駛定位技術就是解決“我在哪兒”的問題,并且對可靠性和安全性提出了非常高的要求。除了GPS與慣性傳感器外,我們通常還會使用LiDAR點云與高精地圖匹配,以及視覺里程計算法等定位方法,讓各種定位法
發表于 05-09 04:41
如何讓自動駕駛更加安全?
要有可靠性、安全性做保證。現在一些企業往往以市場推廣宣傳為主,真正技術上能達到安全可靠的還是比較少。實現真正意義上的自動駕駛是個系統工程需要汽車、通信技術、“聰明的路”、高精度地圖等多種集成在上海嘉定安亭鎮
發表于 05-13 00:26
自動駕駛汽車的處理能力怎么樣?
作在未來20 - 30年中,自動駕駛汽車(AV)將改變我們的駕駛習慣、運輸行業并更廣泛地影響社會。 我們不僅能夠將汽車召喚到我們的家門口并在使用后將其送走,自動駕駛汽車還將挑戰個人擁有汽車的想法,并
發表于 08-07 07:13
聯網安全接受度成自動駕駛的關鍵
隨著時代的演進與汽車工業技術、機器視覺系統、人工智能和傳感器相關技術上不斷創新與進步,無人自動駕駛汽車已不是一件遙不可及的夢想,Google與國際車廠相繼針對自動駕駛技術致力研究開發,進一步讓
發表于 08-26 06:45
如何保證自動駕駛的安全?
自動駕駛技術為人們勾勒出了一副美好的未來出行的畫面:坐上沒有方向盤的汽車,一覺睡到公司門口;甚至我們可能不再擁有一輛汽車,需要出門時共享自動駕駛汽車會自己到來,送到目的地時會自行離開……不過自動駕駛
發表于 10-22 07:45
自動駕駛系統設計及應用的相關資料分享
作者:余貴珍、周彬、王陽、周亦威、白宇目錄第一章 自動駕駛系統概述1.1 自動駕駛系統架構1.1.1 自動駕駛系統的三個層級1.1.2 自動駕駛系統的基本技術架構1.2
發表于 08-30 08:36
自動駕駛技術的實現
k隨著汽車電子的日益復雜化以及汽車電子電氣架構(EEA)的升級,人們對于聯網智能汽車的需求也在逐步上升,大量先進技術往汽車上應用,如高級駕駛輔助系統(ADAS)、自動駕駛等,這些新技術也對車載網絡
發表于 09-03 08:31





 工商網監
工商網監
評論