 全國產EtherCAT運動控制邊緣控制器(六):RtBasic文件下載與連續軌跡加工的Python+Qt開發
全國產EtherCAT運動控制邊緣控制器(六):RtBasic文件下載與連續軌跡加工的Python+Qt開發
今天,正運動小助手給大家分享一下全國產EtherCAT運動控制邊緣控制器ZMC432H如何使用Python+QT實現連續軌跡加工。
01 功能簡介
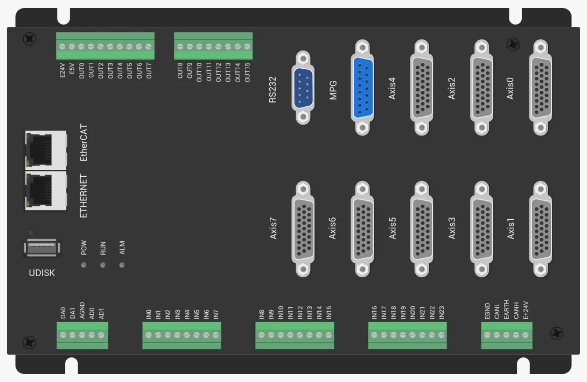
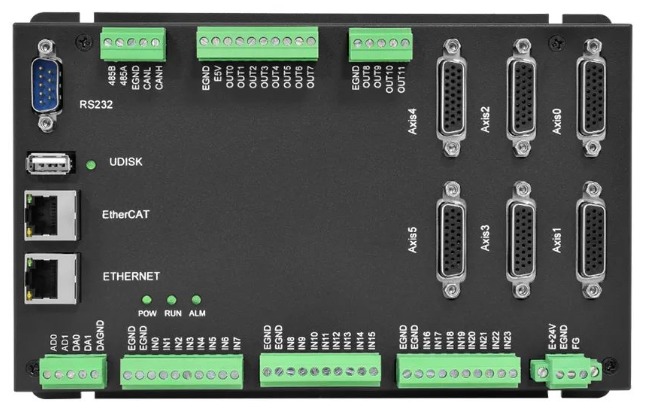
全國產EtherCAT運動控制邊緣控制器ZMC432H是正運動的一款軟硬件全國產自主可控,運動控制接口兼容EtherCAT總線和脈沖型的獨立式運動控制器,最多支持32軸運動控制,同時支持正運動遠程HMI功能,能提供網絡組態顯示,可實時監控和調整參數配置。
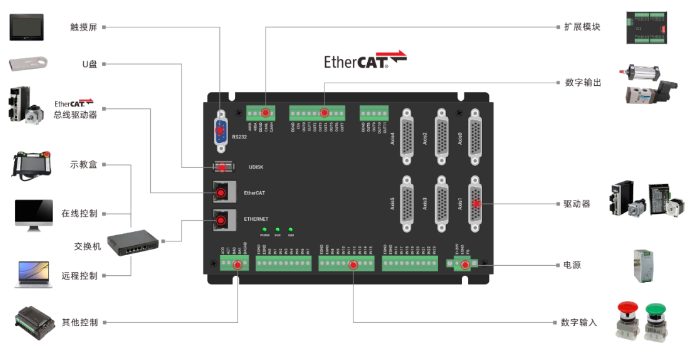
ZMC432H具備豐富的硬件接口和控制功能模塊,能實現高效穩定的運動控制和實時數據采集,以滿足工業控制協同工業互聯網的應用需求。ZMC432H內置了Linux系統,可以使用本地的LOCAL接口進行連接,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間為40us左右。
02 Python+QT進行運動控制開發
一.配置好python +Qt開發環境,以及安裝好所需工具
1、下載python解釋器。
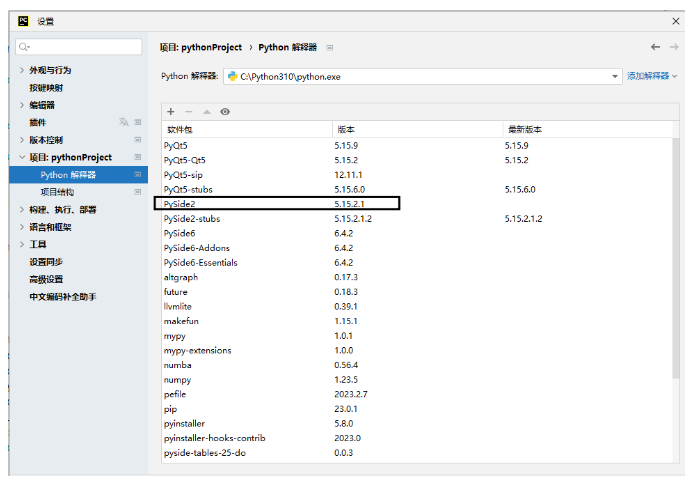
2、安裝pyside2或者pyside6根據python解釋器的版本來選擇,高版本的解釋器使用pyside6。
安裝pyside2有以下兩種方式:
方式一:使用win+r打開運行界面,然后輸入cmd(在安裝python解釋器的時候要根據安裝向導配置好環境變量,否則后面的指令不會執行成功),pip install pyside2 -i https://pypi.douban.com/simple/ ;
方式二:在pycharm中安裝 。
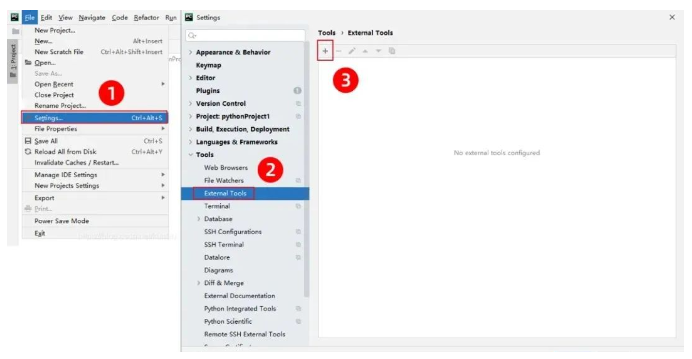
3、安裝好PyCharm Community Edition,在如下界面點擊+號,安裝所需的工具,如pyside2。
4、在Pycharm中配置自定義工具(用于qt的界面編輯)。
(1)按照如圖步驟打開Tool的編輯框。
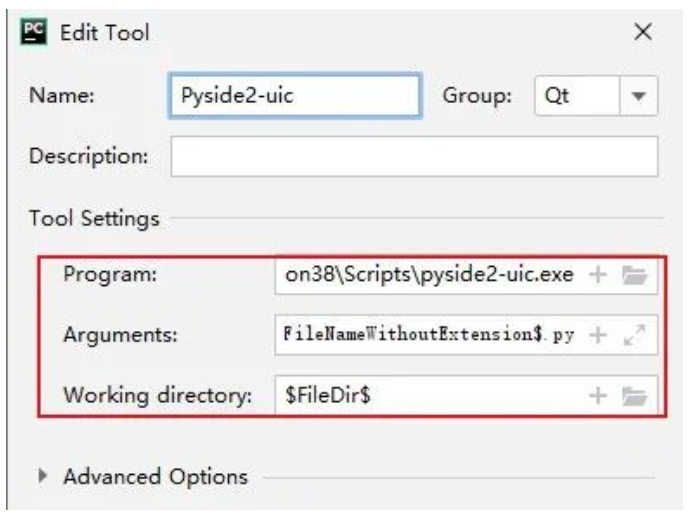
(2)自定義Pyside2-uic:
a.Program填寫:Python安裝目錄 Scriptspyside2-uic.exe;
b.Arguments填寫:$FileName$ -o $FileNameWithoutExtension$.py;
c.Working directory填寫:$FileDir$。
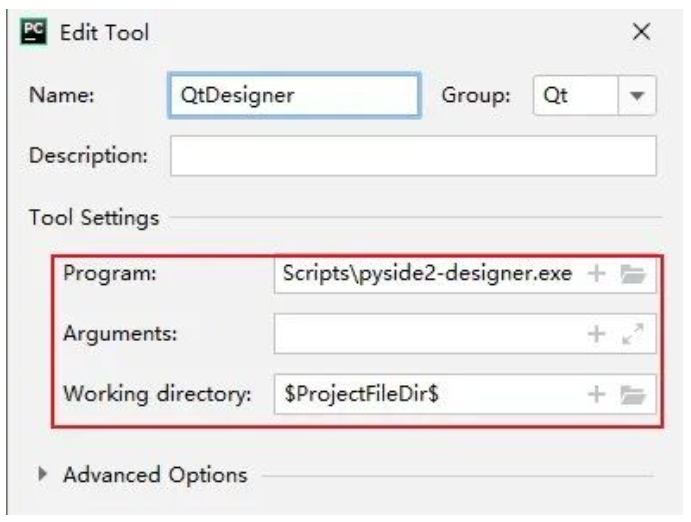
(3)自定義QtDesigner:
a.Program填寫:Python安裝目錄 Scriptspyside2-designer.exe;
b.Working directory填寫:$ProjectFileDir$。
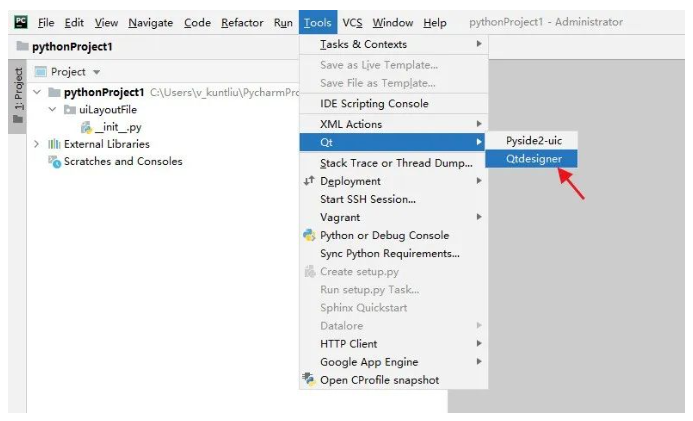
將自定義工具配置好之后就可以直接在PyCharm的菜單中直接使用了。
1、點擊Tools → Qt → Qtdesigner即可進入UI的設計界面。
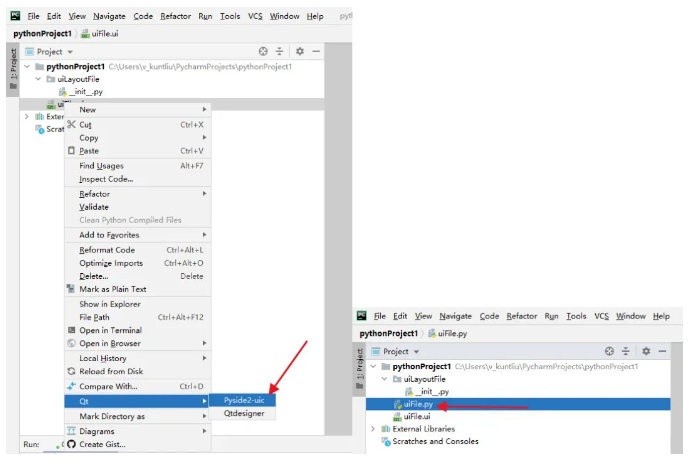
2、右鍵ui文件,點擊Qt → Pyside2-uic即可生成ui文件的py文件。
二.新建Python項目并添加函數庫
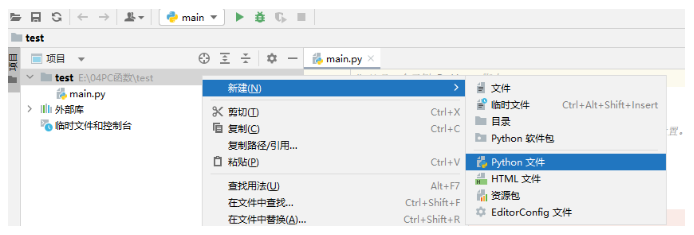
1、使用PyCharm Community Edition 2022打開一個新建的文件夾或者在進入PyCharm Community Edition 2022之后新建一個目錄,并在目錄中添加Python文件。
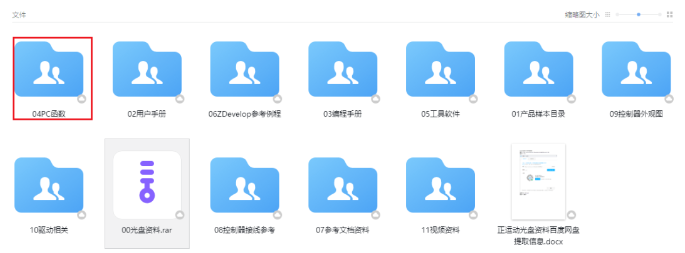
2、找到 找到廠家提供的光盤資料,路徑如下。
A.進入廠商提供的光盤資料找到“04.PC函數”文件夾,并點擊進入。
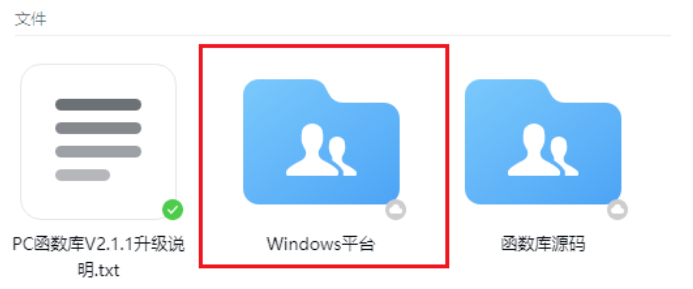
B.選擇“PC函數庫V2.1.1”文件夾。

C.選擇“Windows平臺”文件夾。
D.選擇“庫文件與例程”文件夾。
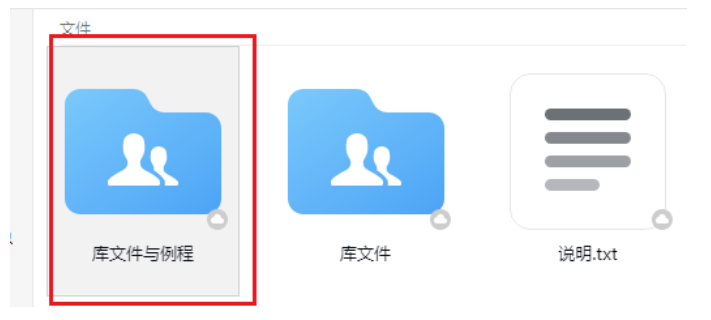
E.選擇“PYTHON例程”文件夾。
F.解壓對應位數的壓縮包。

G.解壓后如下圖所示。
3、對于Windows系統來說將zauxdll.dll、zmotion.dll以及zauxdllPython.Py文件加入所創建的文件夾內即可。
三.查看PC函數手冊,熟悉相關函數接口。
1、PC函數手冊也在光盤資料里面,具體路徑如下:“光盤資料?4.PC函數ZMotionPC函數庫編程手冊及其例程源碼ZMotionPC函數庫編程手冊 V2.1.1.pdf”。

2、鏈接控制器,獲取鏈接句柄。
(1)ZAux_OpenEth()接口說明。
| 指令7 | ZAux_OpenEth |
| 指令原型 | int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) |
| 指令說明 | 以太網鏈接控制器。 |
| 輸入參數 | 輸入參數1個,詳細見下面說明。 |
| ipaddr | 鏈接的IP地址。 |
| 輸出參數 | 輸出參數1個,詳細見下面說明。 |
| Phandle | 返回的鏈接句柄。 |
| 返回值 | 詳細見錯誤碼說明。 |
(2)下載“.bas”文件到控制器中運行的接口說明。
| 指令12 | ZAux_BasDown |
| 指令原型 | int32 __stdcall ZAux_BasDown(ZMC_HANDLE handle,const char *Filename,uint32 run_mode ) |
| 指令說明 | 單個bas文件生成ZAR并且下載到控制器運行 |
| 輸入參數 | 共有3個輸入參數,見下方說明。 |
| handle | 鏈接句柄。 |
| Filename | BAS文件名帶路徑。 |
| run_mode | 下載模式0-RAM 1-ROM。 |
(3)暫停和恢復控制器內部Basic程序的接口說明。
| 指令10 | ZAux_Pause |
| 指令原型 | int32 __stdcall ZAux_Pause(ZMC_HANDLE handle) |
| 指令說明 | 暫停控制器內部運行的Basic程序。 |
| 輸入參數 | 輸入參數1個,見下方說明。 |
| handle | 鏈接句柄。 |
| 指令11 | ZAux_Resume |
| 指令原型 | int32 __stdcall ZAux_Resume(ZMC_HANDLE handle) |
| 指令說明 | 繼續控制器內部運行的Basic程序。 |
| 輸入參數 | 輸入參數1個,見下方說明。 |
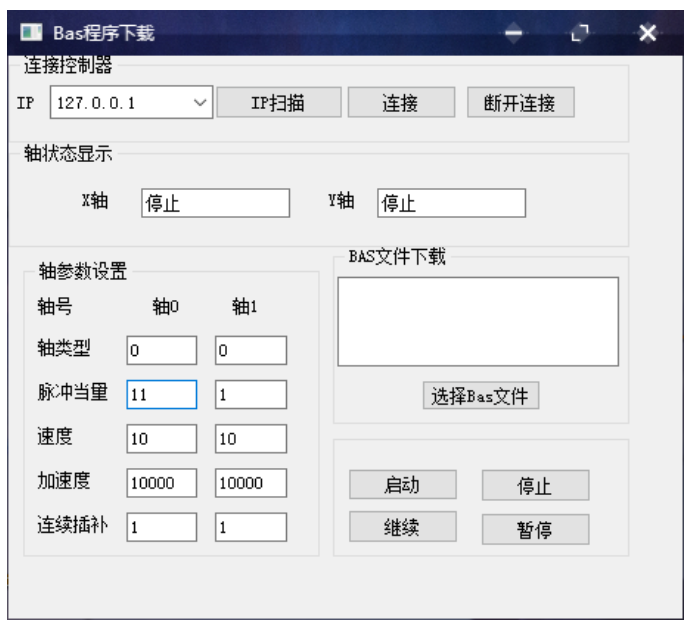
四.RtBasic文件下載與連續軌跡加工的Python+Qt開發例程。
1、例程界面如下。
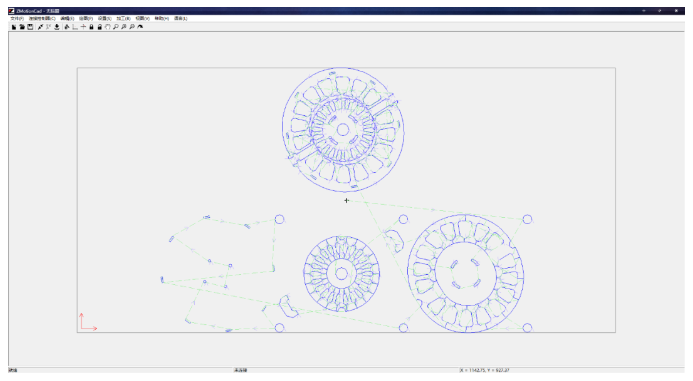
2、通過“光盤資料”→“工具軟件”里面的“ZmotionCadV1.0導圖工具”將CAD圖紙里面的圖形轉換成“.bas”的運動控制代碼。
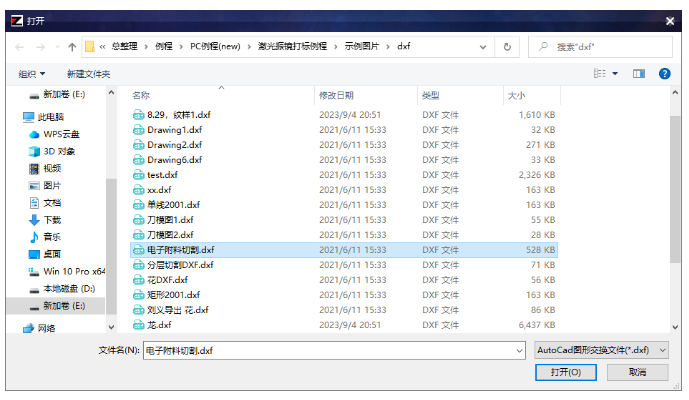
A.打開該工具軟件,點擊“文件”→“導入”。選擇需要轉換的dxf格式的CAD圖紙并打開。
B.打開后效果如下。
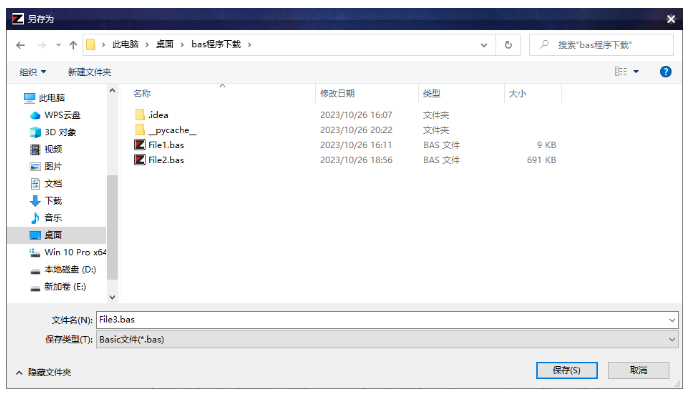
C.點擊“文件”→“導出”,導出“.bas”文件。到時候可下載到控制卡里面進行以上軌跡的運動控制。
D.CAD導圖軟件的具體使用方法參考往期文章正運動技術CAD導圖軟件配合控制器的使用方法。
3、程序示例如下。
(1)Python中加載qt的UI文件;
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
注:此時 self.ui表示了qt中的ui。
(2) 鏈接按鈕的事件處理函數中調用鏈接控制器的接口函數ZAux_OpenEth(),與控制器進行鏈接,鏈接成功后啟動定時器1監控控制器狀態。
def on_btn_open_clicked(self):
strtemp = self.ui.comboBox.currentText()
print("當前的ip是 :", strtemp)
if self.Zmc.handle.value is not None:
self.Zmc.close()
self.time1.stop()
self.ui.setWindowTitle("單軸回零")
iresult = self.Zmc.open_eth(strtemp)
if 0 != iresult:
QMessageBox.warning(self.ui, "提示", "連接失敗")
else:
QMessageBox.warning(self.ui, "提示", "連接成功")
str_title = self.ui.windowTitle() + strtemp
self.ui.setWindowTitle(str_title)
self.Up_State()
self.time1.start(100)
(3) 通過定時器監控控制器狀態。
def Up_State(self):
idlelist = [ctypes.c_int(-1) for i in range(0, 4)]
fdposlist = [ctypes.c_float(0) for i in range(0, 4)]
for i in range(0, 4):
self.Zmc.get_target_pos(i, fdposlist[i]) # 獲取當前軸位置
self.Zmc.get_idle(i, idlelist[i]) # 判斷當前軸狀態
str1 = " {} {} ".format("停止中" if idlelist[0].value else "運行中", round(fdposlist[0].value, 2))
self.ui.lineEdit_X.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[1].value else "運行中", round(fdposlist[1].value, 2))
self.ui.lineEdit_Y.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[2].value else "運行中", round(fdposlist[2].value, 2))
self.ui.lineEdit_Z.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[3].value else "運行中", round(fdposlist[3].value, 2))
self.ui.lineEdit_R.setText(str1)
(4)通過“選擇bas文件”按鈕的事件處理函數選擇對應的bas文件。
def on_btn_DownBas_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "提示", "未連接控制器")
return
file_Date = QFileDialog.getOpenFileName(self.ui, "選擇BAS文件", "..", "Files(*.bas)")
self.file_Name = file_Date[0].replace("/", "")
print(self.file_Name)
if self.file_Name == "":
return
self.ui.textEdit_FilePath.insertPlainText(self.file_Name + "n")
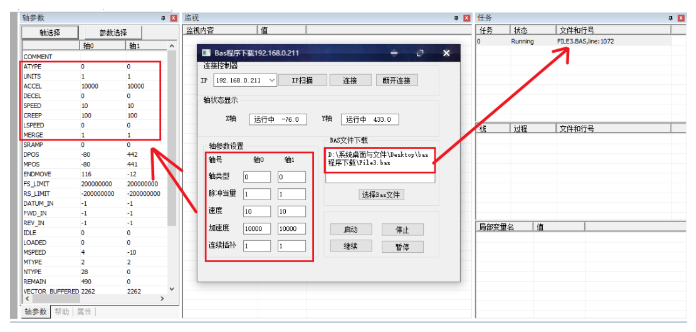
(5)通過“啟動”按鈕的事件處理函數來下載和啟動選擇的bas文件。
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未連接控制器")
return
# 設定軸0軸類型
str_tmp = self.ui.edit_Atype_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(0, float_tmp)
# 設定軸0軸類型
str_tmp = self.ui.edit_Atype_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(1, float_tmp)
# 設定脈沖模式及邏輯方向(脈沖 + 方向)
self.Zmc.set_invert_step(self.axis_Num, 0)
# 設置當量
str_tmp = self.ui.edit_Units_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(0, float_tmp)
str_tmp = self.ui.edit_Units_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(1, float_tmp)
# 設置速度
str_tmp = self.ui.edit_Speed_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(0, float_tmp)
str_tmp = self.ui.edit_Speed_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(1, float_tmp)
# 設置加速度
str_tmp = self.ui.edit_Accel_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(0, float_tmp)
str_tmp = self.ui.edit_Accel_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(1, float_tmp)
# 設置減速度
self.Zmc.set_deceleration(0, 0)
self.Zmc.set_deceleration(1, 0)
#開啟連續插補
str_tmp = self.ui.edit_Merge_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(0,float_tmp)
str_tmp = self.ui.edit_Merge_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(1, float_tmp)
if self.file_Name == "":
return
ret = self.Zmc.bas_down(self.file_Name, 1) # 下載到ROM 運行
if ret != 0:
QMessageBox.warning(self.ui, "提示", "文件下載失敗!" + "錯誤碼為 :{} ".format(ret))
return
注:“.bas”文件也可以通過我們的ZDevelop軟件下載。ZAux_BasDown指令會將單個bas文件生成ZAR并且下載到控制器運行。
(6)通過停止、暫停、繼續按鈕的事件處理函數來實現控制器。
def on_btn_stop_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未連接控制器")
return
buffer = (ctypes.c_char * 1024)()
ret = self.Zmc.execute("STOPTASK 0", buffer, 0)
ret = self.Zmc.rapid_stop(2)
def on_btn_Pause_clicked(self):
ret = self.Zmc.bas_pause()
if ret != 0:
QMessageBox.warning(self.ui, "提示", "運動暫停失敗!" + "錯誤碼為 :{} ".format(ret))
return
def on_btn_Resume_clicked(self):
ret = self.Zmc.bas_resume()
if ret != 0:
QMessageBox.warning(self.ui, "提示", "運動恢復失敗!" + "錯誤碼為 :{} ".format(ret))
return
03 調試與監控
編譯運行例程,同時通過ZDevelop軟件連接控制器對控制器狀態進行監控。
ZDevelop軟件連接控制器打開調試模式可以查看控制器里面的“.bas”文件的文件名。
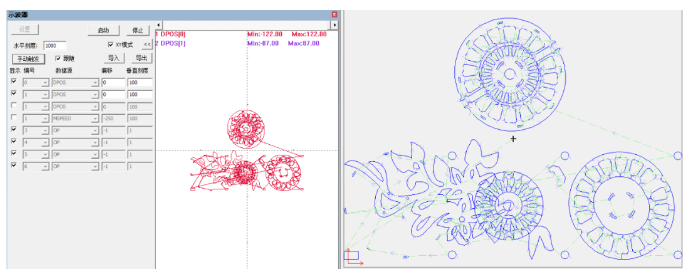
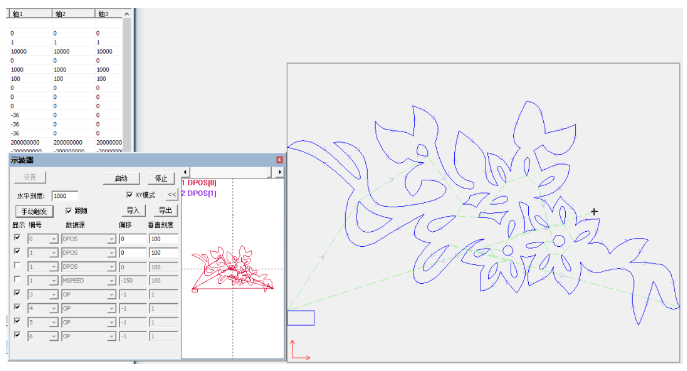
通過ZDevelop軟件的示波器功能對連續小線段的波形進行抓取,下面是示波器波形和CAD圖紙的比較。
比較如下圖所示。
本次,正運動技術全國產EtherCAT運動控制邊緣控制器(六):RtBasic文件下載與連續軌跡加工的Python+QT開發,就分享到這里。更多精彩內容請關注“ 正運動小助手 ”公眾號。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
-
控制器
+關注
關注
112文章
16442瀏覽量
179015 -
運動控制器
+關注
關注
2文章
408瀏覽量
24774 -
運動控制卡
+關注
關注
7文章
114瀏覽量
15493 -
ethercat
+關注
關注
18文章
730瀏覽量
38796
發布評論請先 登錄
相關推薦
EtherCAT運動控制器上位機開發之Python+Qt(三):PDO配置與SDO讀寫


【正運動】全國產EtherCAT運動控制器 | ZMC432H
EtherCAT運動控制器進行自定義API封裝例程

EtherCAT運動控制邊緣控制器功能簡介和自定義API封裝例程



全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器ZMC432H如何使用Python+QT實現連續軌跡加工







 工商網監
工商網監
評論