 51單片機教程 使用PWM對舵機進行控制
51單片機教程 使用PWM對舵機進行控制
舵機的控制方式
舵機的種類有很多,下面我所展示的是非常常見的SG90舵機(下面簡稱“舵機”),也是我們這次實驗室考核所使用的舵機。
篇幅有限,這里只簡單介紹了SG90舵機,想深入研究的同學可以自己去查閱資料。
我們先來了解一下SG90舵機

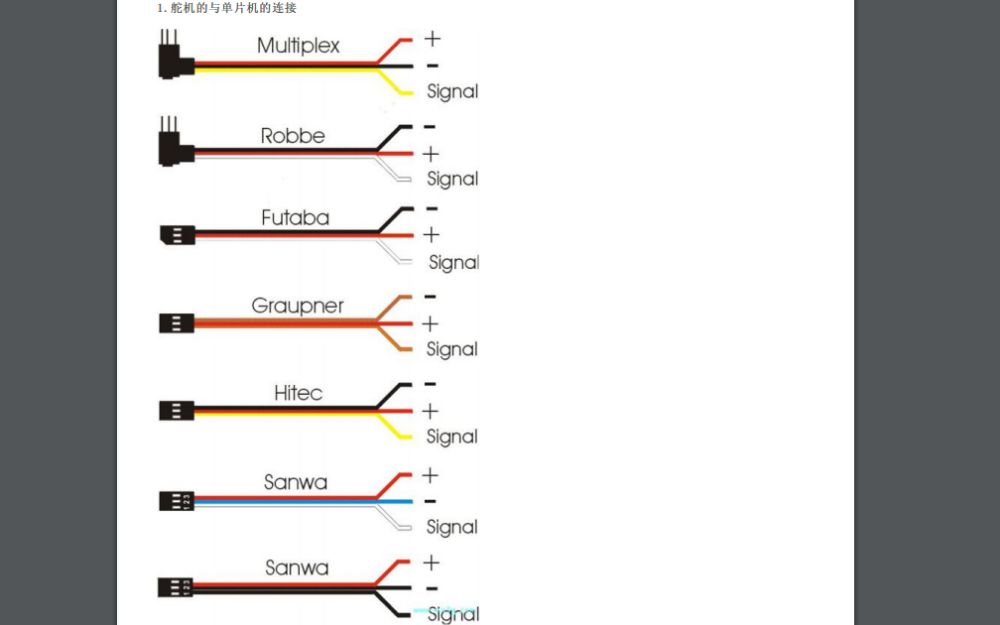
SG90舵機有三根線:GND、VCC和信號線:

GND(負極)和VCC(正極)都是電源線,可以接在開發板相同標識的排針或與開發板相同的電源上,注意GND要與單片機共地(接在同一個負極上)。
信號線接在單片機的IO口上,我們使用IO口輸出PWM來控制舵機。
在對舵機進行控制時,像控制LED燈直接對信號線輸出1和0是不能夠正常控制的,要使用PWM進行控制:

↑不正確的控制方法,可能是醬紫的

↑使用PWM控制,能隨意改變角度
那么下面我們進入正題:使用PWM對舵機進行控制。
舵機能在其旋轉范圍內(0°~180°)旋轉至任意角度,但注意,這不是指能夠連續轉圈圈,而是像一把量角器,假設設置了30°,那么舵機就會旋轉至30°的位置并停下,而不是在原來的位置疊加上30°。
舵機的旋轉角度是通過PWM的占空比來調節的,PWM的周期一般為20ms,它們的關系如下表所示:

可以發現,要舵機停在0°的位置并不能將IO口直接置0,180°也不能直接置1。
示例程序
舵機的控制程序其實和LED亮度調節、呼吸燈的程序基本一致,都是使用PWM控制,只不過占空比有范圍而已。
下面的程序是在我之前發的PWM的程序上稍作修改得到的,PWM部分就不再解釋了,只解釋舵機的控制部分。
#include < reg52.h >
#define PWM_T 200 //產生中斷的時間,因為是24MHz,200即100微妙(0.1毫秒)
int PWM_count0 = 0; //進入中斷的次數
int PWM_count1 = 0; //與上面的類似,用于計數
int PWM_F = 0; //一個用于計時的標志,作用類似定時器的TF0、TF1
sbit servo = P2^0; //舵機信號線所連接的IO口
void PWM_Start() //PWM初始化函數,打開了定時器0
{
EA = 1;
ET0 = 1;
TMOD |= 0x01;
TR0 = 1;
TH0 = (65536-PWM_T)/256;
TL0 = (65536-PWM_T)%256;
}
int PWM(int PWM_value) //控制PWM輸出的子函數
{
if(PWM_count0 <= PWM_value)
{
return 1;
}
else
{
return 0;
}
}
void main()
{
PWM_Start(); //PWM開始運行
while(1)
{
while(1)
{
servo = PWM(5); //旋轉至0°
if(PWM_F == 1) //判斷標志是否為1,是則代表著過了1秒
{
PWM_F = 0; //將標志歸零
break; //過了1秒,退出循環
}
}
while(1)
{
servo = PWM(10); //旋轉至45°
if(PWM_F == 1)
{
PWM_F = 0;
break;
}
}
while(1)
{
servo = PWM(15); //旋轉至90°
if(PWM_F == 1)
{
PWM_F = 0;
break;
}
}
while(1)
{
servo = PWM(20); //旋轉至135°
if(PWM_F == 1)
{
PWM_F = 0;
break;
}
}
while(1)
{
servo = PWM(25); //旋轉至180°
if(PWM_F == 1)
{
PWM_F = 0;
break;
}
}
}
}
void Timer0() interrupt 1
{
TH0 = (65536-PWM_T)/256;
TL0 = (65536-PWM_T)%256;
PWM_count0++;
if(PWM_count0 == 200) //過了20ms,完成了一個PWM周期
{
PWM_count0 = 0; //清零,重新開始計數
PWM_count1++;
if(PWM_count1 == 50) //PWM_count0清零了50次,也就是說過了20ms*50=1000ms=1s
{
PWM_count1 = 0; //清零,重新開始計數
PWM_F = 1; //標志置1,說明已經過了2s
}
}
}
我在程序中并沒有使用軟件延時(delay()函數),這在PWM那篇文章中也說過了,軟件延時期間無法改變IO口的高低電平輸出,PWM也就失效了。
我的做法是設置一個標志PWM_F(也可以直接判斷PWM_count1的值),當達到設定的時間就退出循環,否則就回到循環進行PWM輸出。
如果你覺得這樣做比較麻煩,也可以調用另一個定時器來計時,不過定時器的數量是有限的(51只有兩個,52、STC15F2K60S2有三個)。
在寫PWM的程序時,可以參考我上面的做法,每0.1ms進入一次中斷,進入200次(20ms)就完成一次PWM中斷,對應著舵機所要求的PWM周期長度,控制起來也會方便很多。
另外,頭文件建議使用與單片機型號所匹配的,上面例程中包含reg52.h是為了有較高的兼容性,但這樣就有一些資源無法調用。例如STC15F2K60S2,P4引腳(如P47)只有在包含STC15F2K60S2.h時才能被調用。
假如你的舵機不能正常運行,可能是下面的原因:
1.單片機晶振或定時器沒有設置正確,例如上面例程對應的是24MHz的頻率,下載時選擇了默認的11.0592MHz;
2.電源供電不足,可以使用充電寶供電試試。
總結
學會PWM后,舵機的控制其實非常容易,稍作一下改動就行。對舵機感興趣的同學可以去了解一下其他類型的舵機,使用PWM控制的只是其中一種。
-
51單片機
+關注
關注
274文章
5705瀏覽量
124093 -
PWM控制
+關注
關注
7文章
194瀏覽量
26381 -
舵機
+關注
關注
17文章
280瀏覽量
41149 -
GND
+關注
關注
2文章
540瀏覽量
38849 -
SG90
+關注
關注
0文章
9瀏覽量
11521
發布評論請先 登錄
相關推薦
使用51單片機PWM雙舵機控制的詳細資料和程序概述







 工商網監
工商網監
評論