 干掉激光雷達,極越錨定純視覺智駕路線
干掉激光雷達,極越錨定純視覺智駕路線
是不是來晚了?
作為后來者,吉利與百度合資成立的全新智能汽車品牌極越,成立兩年來被屢次追問。如今,極越給出了一些答案。
10月17日,在首款產品極越01上市前夕,極越發布了其國內首個BEV+Transformer“純視覺”高階智駕技術方案。同時,極越與百度聯合研發的國內首個占用網絡技術(Occupancy Network,“OCC”)也首次對外公布,該技術的引入將進一步提升汽車機器人“純視覺”高階智駕能力。
目前,極越的這套純視覺方案已在上海城區道路實現領航輔助駕駛,年內將在三個城市落地。盡管仍采用高精地圖作為傳感器之一,但該方案如果最終量產上車,極越則將成為特斯拉之后,第二個采用純視覺方案的車企。
而純視覺也被認為是難度極大,上限極高的自動駕駛技術方案。
“激光雷達可在短期內迅速提升系統表現,但存在上限。”極越 CEO 夏一平向《電動汽車觀察家》表示:“長期來看,純視覺在系統成本、迭代速度、數據閉環,甚至向端到端發展都具備優勢。所以比較激進得把激光雷達干掉了。”
極越01將于10月底正式上市,并同步開啟交付。如今,智駕已經成為中高端電動汽車必備要素。高階智能化能力特別是智能駕駛,也是極越01主打賣點。因此,極越表示極越01上市可做到業界領先的“開箱即用”。不過,具體的智駕量產方案,還要等上市的時候才確定。
但無論如何,在下一階段智駕方案上,在業界比較有共識的純視覺方向上,極越的探索走在了前面。
01
放棄激光雷達,錨定純視覺方案
“我跟王亮(百度智能駕駛事業群組技術委員會主席)說,這個事情(選擇純視覺路線)就這么干了。”夏一平表示,極越在4月份左右堅定了純視覺的技術路線,
“又想保激光雷達,又想搞純視覺,很可能最后兩個都搞不好。方向是對的,就把干激光雷達的資源干純視覺,說不定干出來的結果,比兩條腿走路更好。”
在激光雷達和純視覺方案之間,極越做過很大的搖擺。
早在2021年年初討論極越智能駕駛的項目方案時,夏一平和王亮便考慮過純視覺方案,但最終出于安全考慮仍增加了兩個前向激光雷達。
2021年年底,極越騾子車(Mule Car,白車身裝載設計底盤和動力系統)基于英偉達Xavier平臺30TOPS的算力,跑通固定路線的高速和城市領航功能;
2022年年初,極越智駕系統切換至258TOPS×2的雙Orin-X平臺上。當年十月份,感知硬件位置固定的樣車準備就緒后,極越開始重寫智駕系統的算法架構,以應用BEV+Transformer的新技術方案。
2023年年初,取消激光雷達被正式提上討論議程,并在四五月份最終確定。確定取消激光雷達后,極越在全國投入數百輛車進行BEV的泛化,和地圖完善的工作。
王亮表示:最終應用純視覺方案,經過了量化的標準質量體系,和用戶、高管試駕體驗,這樣客觀加主觀的雙重考驗。“在攝像頭沾上泥等極特殊情況外,其它大部分體驗(相比有激光雷達的方案)要沒有什么起伏,我們才能允許這個東西上。”
17日,極越官方發布了一臺僅搭載純視覺感知架構的極越01跑完了上海陸家嘴-外灘-南浦大橋等路段,全程零接管的“一鏡到底”路試視頻。
02 純視覺的下一步:上占用網絡,去圖
“(基于純視覺方案),我們現在選路試的Demo路線都更加容易。我自己點到點能開很多地方。”夏一平表示極越選擇純視覺路線主要出于三點考慮:
其一:BEV+Transformer的“純視覺”方案在性能上具備追平激光雷達方案的能力,并且性能上限極高;
其二:純視覺方案有利于數據驅動。相比視覺+激光雷達,兩套感知算法進行融合的方式,一套硬件一套算法在數據采集、標注、分布、訓練上的效率更高;
其三:去掉激光雷達有利于降低系統成本,從而使高階智駕能力落地普惠的能力更強。
之前的信息顯示,極越01將配備雙激光雷達、雙Orin-X,5個毫米波雷達、12個超聲波雷達、12個自動駕駛高清攝像頭、1個駕駛員紅外感知攝像頭和2個高精度定位單元作為智駕的主系統硬件方案。
此外,座艙域的8295芯片還將支持智駕方案的冗余安全系統。
之前,極越的前身集度,采用禾賽AT128激光雷達方案,如果最終量產方案取消激光雷達,則意味著智駕系統的BOM成本下降1萬元左右(按照AT128售價6000元計算)。如果超聲波和毫米波雷達也去掉,則進一步降低成本。
不過第一階段,極越的方案并稱不上真正的純視覺,其仍需要在高精地圖覆蓋的范圍內才能啟動,無圖的路段則將降級為增強LCC類的輔助功能。
對此王亮表示,去圖比去激光雷達更加困難。極越將從現在依賴高精地圖向輕地圖,最終無圖化的方向發展。
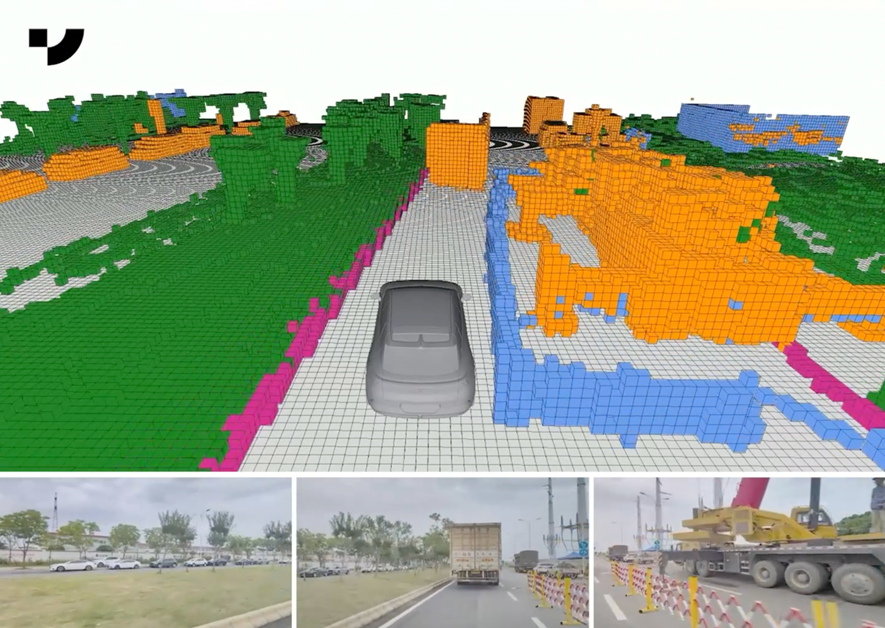
極越OCC占用網絡技術演示
此外,“今年基本上OCC也會直接上車了。因為一些場景下,沒有OCC的純視覺表現和激光雷達還有一些差距。我們要保證產品在市場上和其它競品的競爭力,所以我們整個技術上走得比較激進。”
面向終局的端到端(數據輸入端-執行指令輸出端)方案中,極越或將采用感知和決策兩個大模型,通過數據對骨干網絡進行聯合優化的模式來演進。
“一步一步很踏實地做。可能5年甚至更長時間,(完整端到端)的大模型才能運用到車端。那時候可能需要新一輪的重寫。”王亮表示。
03
極越為何能率先拿出純視覺?
純視覺方案因其數據和硬件特性,被認為極有可能是自動駕駛的終局路線。
一方面,視覺圖像豐富的紋理信息,不僅含有自動駕駛系統所需的道路環境信息,而且還有通用智能所需的世界知識。通過學習,自動駕駛系統不僅可以學習駕駛本身,甚至能夠理解世界的底層規則。
例如特斯拉V12的演示中,由于95%以上的人類駕駛員在停止標志前不會完全剎停,FSD V12也就依此“潛規則”低速通過停止標志。
另一方面,只用計算芯片和攝像頭的硬件成本則更低。
例如特斯拉HW3.0的硬件成本占比整車只有3%左右,而國內高階智駕系統的硬件成本占比通常在10%。更低的硬件成本意味著更多的車型搭載,從而獲得更多的數據。而數據,正是以神經網絡為代表的自動駕駛系統迭代的進步的燃料。
但能力上限極高的純視覺方案,技術難度也極大。目前國內小鵬、華為仍采用激光雷達的融合方案,并開始逐步擺脫高精地圖。極越作為一個后來者,新玩家,為何敢先上“純視覺”方案?
夏一平表示,極越的純視覺方案并非幾個月內產生的無根之木。
在算法上,極越的BEV+Transformer架構,是基于此前百度阿波羅的純視覺方案。
2019年,百度阿波羅內部啟動了“Apollo lite”項目,采用純視覺方案做L4級自動駕駛出租車,從2019年到2021年的三年時間內,Apollo lite可在北京亦莊的自動駕駛出租車上實現無接管的點對點自動駕駛閉環運行。
2021年年底,其ght基于Transform和BEV對算法進行了底層重構。
2022年12月,百度阿波羅發布了ANP3.0路測視頻。其中收費站靈活、無保護左轉、過紅綠燈、近距離切車應對、路口非機動車應對等能力都是由純視覺方案進行。
在數據方面,王亮表示,百度的自動駕駛出租車,和其背后高度自動化的數據閉環體系是極越做純視覺的底層基礎。
目前,百度在全國范圍內有上千輛自動駕駛出租車在運行,實際駕駛里程超過了3200萬公里。相比之下,截至2022年年底,特斯拉FSD Beta行駛里程超過1億英里,約1.6億公里。
但特斯拉等車企受限于流量費用,只能上傳里程數的一小部分數據,阿波羅的數據是全量上傳。“是一個超級大的數據集,我們去里面篩選,像一個大圖書館一樣,你能讀的書其實足夠的。”王亮表示。
云端的大算力,也是純視覺路線“大模型、大數據、大算力”輪動效應成立的前提。
目前百度阿波羅的算力儲備無從得知。但根據IDC的統計顯示,2022年,百度阿波羅自動駕駛云以34.4%的市場份額排名第一;華為、阿里云、騰訊云、亞馬遜云科技(AWS)分列第二至五名,市場份額分別為29.7%、9.2%、5.0%、3.4%。
“再先進的技術也是用來解決實際問題的。”夏一平表示,在純視覺方案之前,其對完全自動駕駛的實現時間估計為10年左右。而從極越01開始,這一估計將縮短至3-5年。
-
智能駕駛
+關注
關注
3文章
2588瀏覽量
48858 -
激光雷達
+關注
關注
968文章
4024瀏覽量
190245 -
數據集
+關注
關注
4文章
1209瀏覽量
24792
原文標題:干掉激光雷達,極越錨定純視覺智駕路線
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
禾賽拒絕“激光雷達無用論”

一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
激光雷達增量加速,接收端芯片市場格局生變

激光雷達的維護與故障排查技巧
激光雷達與純視覺方案,哪個才是自動駕駛最優選?
物聯網系統中的自動駕駛的“眼睛”_純固態激光雷達

光學雷達和激光雷達的區別是什么
小鵬汽車Q4新車重大調整:放棄激光雷達,轉向純視覺智駕
一文看懂激光雷達

狂踩激光雷達的馬斯克,如今竟成Luminar的榜一大哥?

Luminar: 特斯拉是其最大激光雷達客戶
激光雷達新形態!體積縮小60%,成本大幅下降,有望進入千元機時代?
華為詳細解讀激光雷達,輪值董事長徐直軍:有望降到200美元
瑞識科技推出用于激光雷達的二維可尋址VCSEL芯片并獲量產訂單
激光雷達助力智駕,開啟駕駛新紀元






 工商網監
工商網監
評論