") 清華&港大提出LanguageMPC:將大語言模型和MPC相結(jié)合的新型類人智駕系統(tǒng)
清華&港大提出LanguageMPC:將大語言模型和MPC相結(jié)合的新型類人智駕系統(tǒng)
面對復雜多變的交通場景,基于學習的方法已成為了實現(xiàn)高級別自動駕駛系統(tǒng)的主流方案。然而,基于學習的自動駕駛系統(tǒng)仍面臨以下挑戰(zhàn):
對復雜的規(guī)則和獎勵函數(shù)設計的需求使其在理解交通法規(guī)等高級信息上存在困難。
受限于數(shù)據(jù)量和采樣效率,處理罕見事件是其面臨的一大挑戰(zhàn)。
由于神經(jīng)網(wǎng)絡的黑盒特性,現(xiàn)有基于學習的自動駕駛系統(tǒng)缺乏良好的可解釋性。
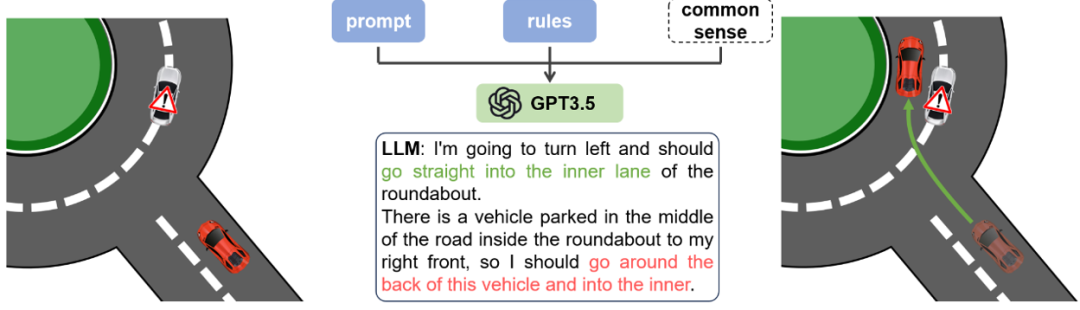
針對以上問題,我們提出將大語言模型(LLM)作為自動駕駛系統(tǒng)的決策核心,利用LLM像人一樣思考的能力,將人類常識和推理能力作為自動駕駛系統(tǒng)決策的指導。同時,我們開發(fā)了將LLM給出的高層決策轉(zhuǎn)化為具體駕駛行為的方法,將高層決策與底層控制器無縫結(jié)合。

在CVer微信公眾號后臺回復:MPC,可以下載本論文pdf,學起來!
LanguageMPC: Large Language Models as Decision Makers for Autonomous Driving 論文:https://arxiv.org/abs/2310.03026 項目網(wǎng)站:https://sites.google.com/view/llm-mpc LanguageMPC:將大語言模型與模型預測控制無縫結(jié)合
LanguageMPC首次將LLM應用于駕駛場景,并設計了將文字形式高層決策轉(zhuǎn)化為可操作駕駛行為的方法。我們定量的證明了LanguageMPC在路口和環(huán)島等復雜交通場景中均優(yōu)于現(xiàn)有基于學習和基于優(yōu)化的自動駕駛系統(tǒng)。同時,我們還展示了LanguageMPC在應對多車協(xié)同控制、文字輔助駕駛等復雜任務時的強大性能。
LanguageMPC的技術(shù)核心在于以下兩點:
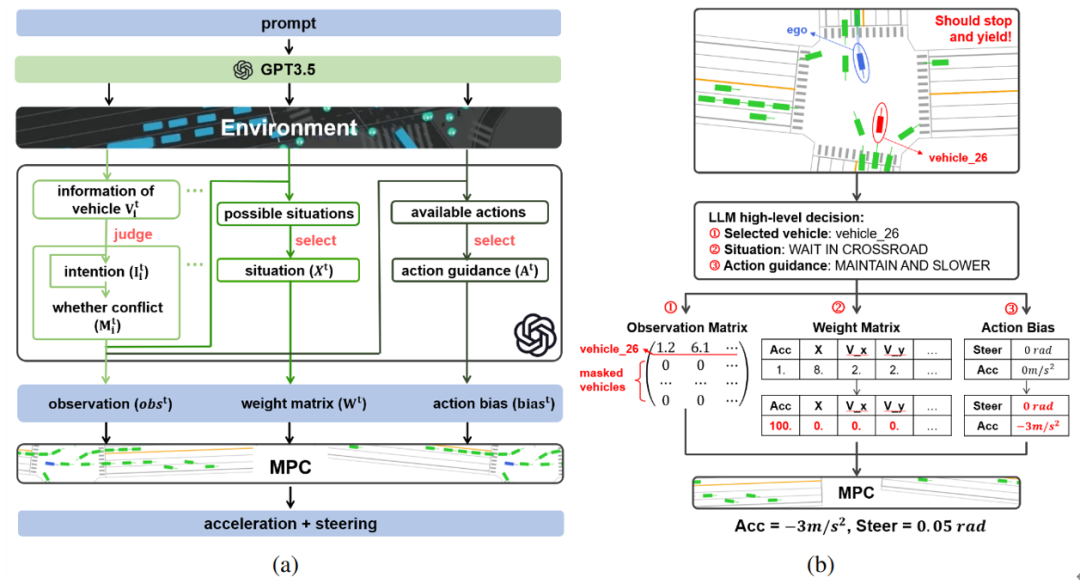
專用于駕駛場景的思維鏈框架。我們使用Langchain管理LLM,通過設計初始prompt和多種工具,指導LLM依次完成對周車的意圖判斷和注意力分配、判斷自車所處情景、給出駕駛動作指引等任務。我們將整個駕駛?cè)蝿談澐譃槎鄠€子任務,并重新設計了場景信息組織方式,通過確保信息的簡潔性來提升LLM的推理能力。
高層決策與模型預測控制銜接。我們設計了將文字形式的高層決策轉(zhuǎn)化為可操作的駕駛行為的方法。具體而言,我們根據(jù)LLM的選擇來重計算觀測矩陣,調(diào)整MPC的注意力分配;調(diào)整懲罰函數(shù)的參數(shù)矩陣,使用LLM給出的情景判斷指導MPC;將LLM的駕駛運動指引轉(zhuǎn)化為運動偏置,直接調(diào)整MPC的駕駛行為。
實驗結(jié)果
定量實驗
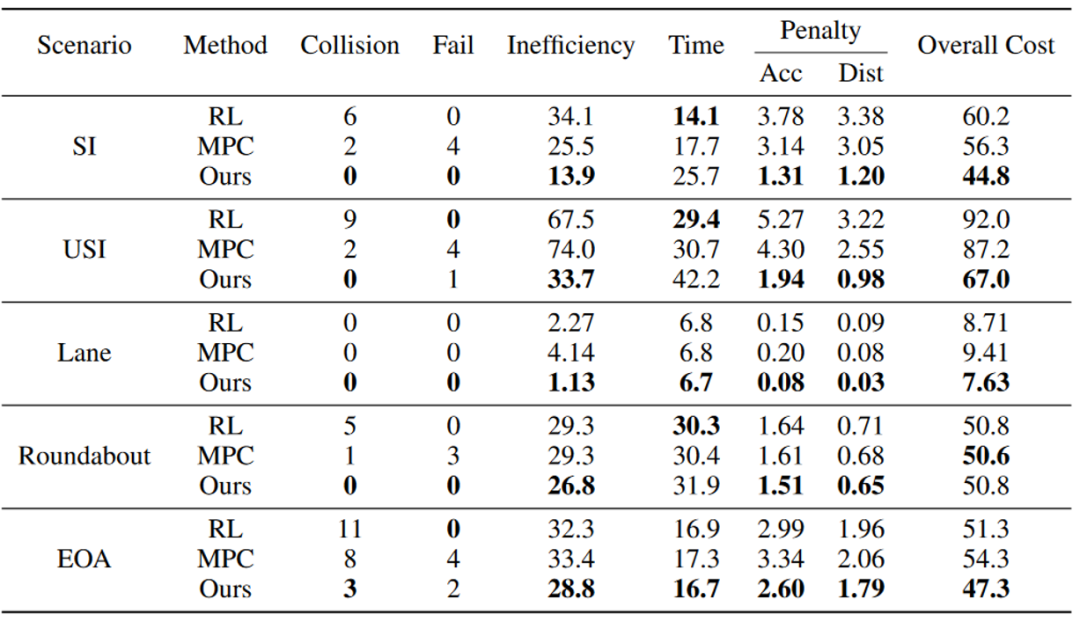
我們的方法在幾乎所有指標上都有明顯提升,并且顯著降低了碰撞幾率和總體Cost。
路口無保護左轉(zhuǎn)
在路口左轉(zhuǎn)時,LanguageMPC能根據(jù)交通規(guī)則讓行對向直行車輛。
路口直行和變道超車
路口直行時,LanguageMPC能遵守路口內(nèi)不超車的規(guī)則,并在到達車道內(nèi)后迅速超車。
多車聯(lián)合控制:窄路會車
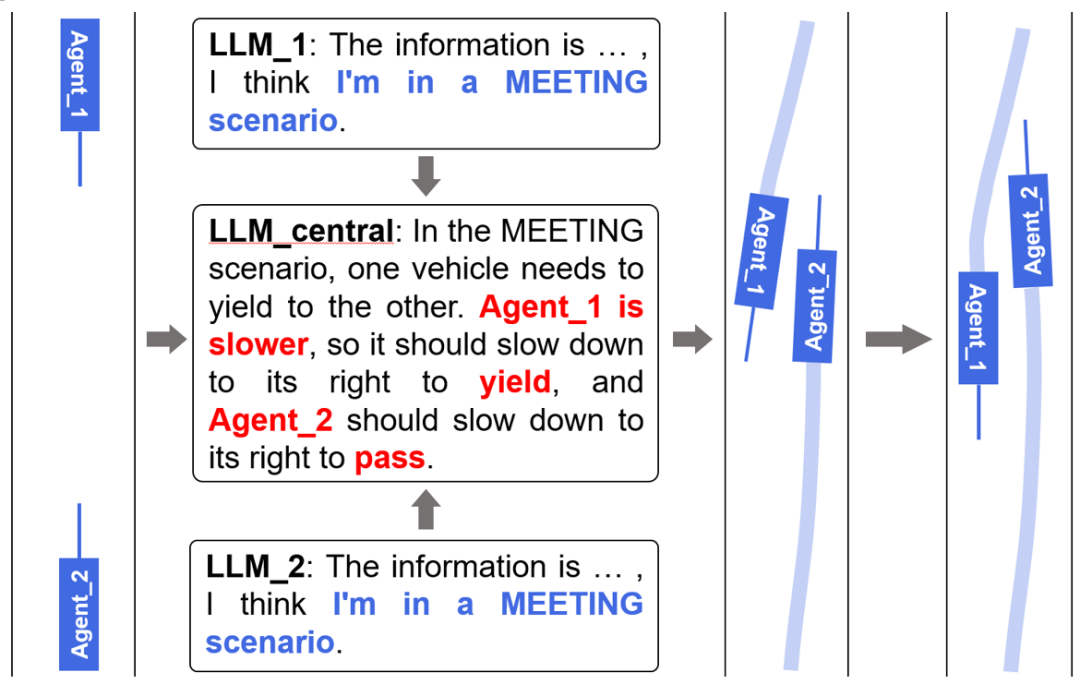
LanguageMPC通過信息匯總和分別控制,實現(xiàn)了高效的多車聯(lián)合控制,完成窄路會車。
調(diào)控駕駛風格
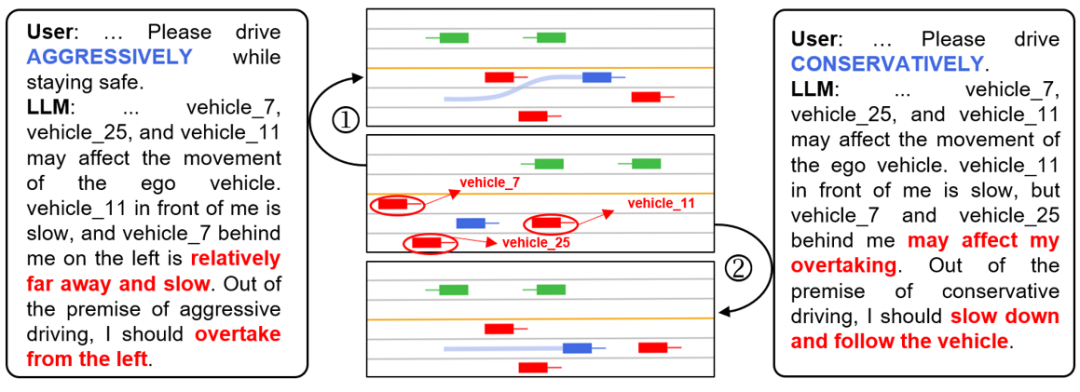
LanguageMPC能根據(jù)文字指引,簡單直接的調(diào)控駕駛風格。
文字指導駕駛
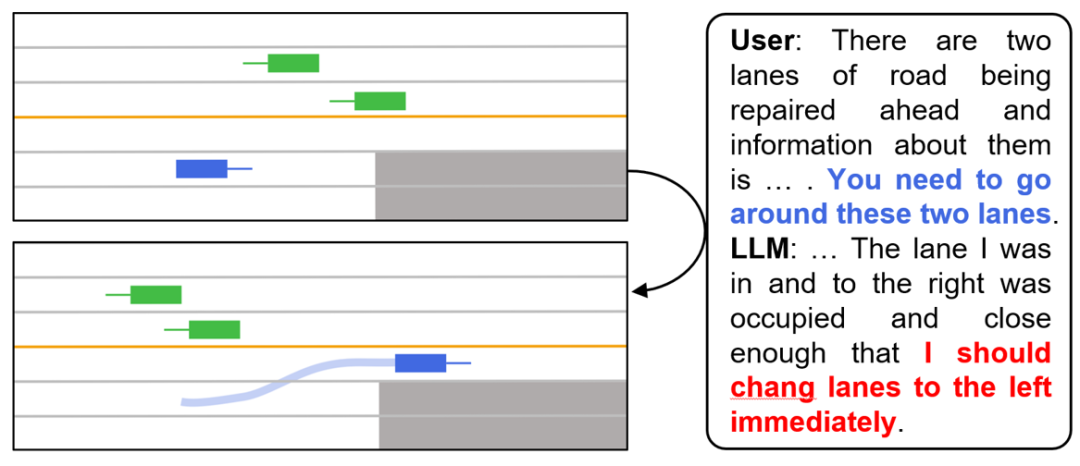
LanguageMPC在文字指引下避開了維修路段。
LanguageMPC在關(guān)鍵指標上大大優(yōu)于現(xiàn)有方法,并能處理復雜的真實世界駕駛場景,可在各種駕駛場景中實現(xiàn)與人類類似的性能,其推理能力和可解釋性有助于克服當前基于學習的駕駛輔助系統(tǒng)在適應性和透明度方面的局限性。
-
MPC
+關(guān)注
關(guān)注
2文章
36瀏覽量
21252 -
語言模型
+關(guān)注
關(guān)注
0文章
538瀏覽量
10319 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13924瀏覽量
166858
原文標題:清華&港大提出LanguageMPC:將大語言模型和MPC相結(jié)合的新型類人智駕系統(tǒng)
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【大語言模型:原理與工程實踐】大語言模型的應用
將Simulink模型與Lego機器人結(jié)合使用
nesC編程語言在無線網(wǎng)絡傳感器設計中的應用
動靜態(tài)相結(jié)合LED顯示【C語言版】
知識圖譜與訓練模型相結(jié)合和命名實體識別的研究工作

基于場景聚類和遺傳算法相結(jié)合的模型求解算法
知識圖譜與BERT相結(jié)合助力語言模型

存儲類&作用域&生命周期&鏈接屬性

港大&amp;騰訊提出DiffusionDet:第一個用于目標檢測的擴散模型
如何區(qū)分Java中的&amp;和&amp;&amp;
IU8689帶主從模式,145W單聲道&amp;amp;2X75W立體聲D類音頻功放






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論