") 驅(qū)動數(shù)字化仿真的四種方法
驅(qū)動數(shù)字化仿真的四種方法
今天我們分享數(shù)字化工廠仿真之驅(qū)動數(shù)字化仿真的四種方法
驅(qū)動的數(shù)字化仿真
無論是縮短上市時(shí)間,加快生產(chǎn)速度,降低成本,提高質(zhì)量還是提高靈活性–大多數(shù)工業(yè)公司都必須應(yīng)對不斷變化的挑戰(zhàn),以適應(yīng)市場的不斷變化。仿真為這些挑戰(zhàn)提供了關(guān)鍵的答案。仿真中的關(guān)鍵要素是數(shù)字模型,生產(chǎn)機(jī)?以虛擬的方式進(jìn)行構(gòu)建。基于軟件可以更順暢地構(gòu)建機(jī)?,更快地建立生產(chǎn)線,并最大程度地利用軟件的優(yōu)勢。不僅在調(diào)試階段,在從設(shè)計(jì)到安裝,操作和維修的整個(gè)生命周期中提供附加值。可以通過多種不同方式使用虛擬模型:例如,評估不同的機(jī)?設(shè)計(jì),培訓(xùn)操作員以確保順利開始生產(chǎn),或在虛擬展示中用作演示模型。
數(shù)字化模擬仿真的最主要目的是盡可能復(fù)制機(jī)器,設(shè)備或工廠。為此,對于現(xiàn)實(shí)世界中涉及的每個(gè)組件,必須盡可能的存在虛擬世界中的等效對象。
對于真實(shí)的PLC控制器可以使用PLCSIM、PLCSIM Advanced進(jìn)行模擬仿真,而真實(shí)的HMI也可以在博途提供的虛擬功能中進(jìn)行仿真。對于機(jī)械部件,可以使用NX Mechatronics概念設(shè)計(jì)器(NX MCD)創(chuàng)建真實(shí)機(jī)器的虛擬3D圖像并進(jìn)行交互。
而對于本文針對的驅(qū)動產(chǎn)品而言,當(dāng)前的一種仿真解決方案是基于SIMIT仿真平臺實(shí)現(xiàn)的。此平臺可以對包含驅(qū)動產(chǎn)品的自動化項(xiàng)目進(jìn)行全面測試,并可以對系統(tǒng),機(jī)器和過程進(jìn)行虛擬調(diào)試或者培訓(xùn)。
驅(qū)動仿真的四種方法
當(dāng)前基于SIMIT實(shí)現(xiàn)驅(qū)動仿真主要有四種方法,介紹如下。
1基于軟件標(biāo)準(zhǔn)功能模塊
方法1:基于SIMIT的標(biāo)準(zhǔn)驅(qū)動模型來實(shí)現(xiàn)。這種方法是利用SIMIT軟件自帶的標(biāo)準(zhǔn)模塊構(gòu)建驅(qū)動通信數(shù)據(jù)級的仿真。此種方法的好處是可以非常靈活的構(gòu)建需要的驅(qū)動功能和數(shù)據(jù),但是對于工程師的準(zhǔn)備工作負(fù)荷會有所增加。只要安裝了SIMIT軟件,就可以進(jìn)行相關(guān)的仿真工作。
如果PLC使用運(yùn)動控制工藝對象來與驅(qū)動器進(jìn)行通信,那么可采用方法1來實(shí)現(xiàn)。
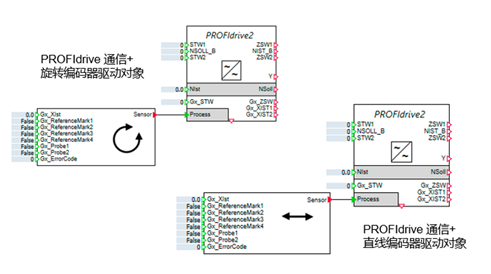
(自行構(gòu)建驅(qū)動數(shù)據(jù))
2基于SIMIT的擴(kuò)展行為庫
為了解決或者減輕工程師在方法1中的工作量,并且為了涵蓋更多的驅(qū)動器的功能,可以使用SIMIT的擴(kuò)展驅(qū)動行為庫。該庫提供額外的驅(qū)動仿真組件,作為SIMIT的標(biāo)準(zhǔn)DRIVES行為庫的擴(kuò)展,可以仿真驅(qū)動的安全數(shù)據(jù)、扭矩?cái)?shù)據(jù)、特別是可以仿真EPOS基本定位數(shù)據(jù)。仿真塊基于詳細(xì)的PROFINET數(shù)據(jù)而提供驅(qū)動器仿真。從控制器的視角,控制模型和控制真實(shí)的驅(qū)動器是一樣的。這種方法需要在SIMIT軟件之上安裝擴(kuò)展行為庫。
如果PLC控制驅(qū)動使用的是基本定位功能或者安全功能,那么應(yīng)該采用方法2來實(shí)現(xiàn)。
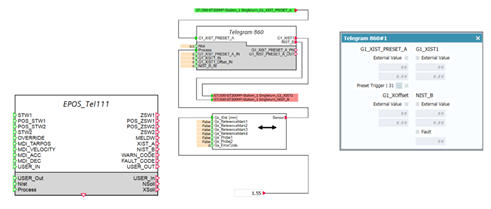
(利用驅(qū)動行為庫進(jìn)行仿真)
3基于工藝的驅(qū)動對象來實(shí)現(xiàn)
方法1和方法2是基于驅(qū)動器而沒有對應(yīng)的被控對象,而對于很多設(shè)備調(diào)試,比如通過驅(qū)動器控制材料的張力進(jìn)行連續(xù)加工,不僅需要模擬驅(qū)動器,而且需要同時(shí)配合模擬機(jī)械和過程單元(如牽引驅(qū)動,從動軸,導(dǎo)輥,跳舞輥裝置和材料行為),此時(shí),可以使用方法3 。對所描述的模擬組件進(jìn)行統(tǒng)一建模。這使工程師可以在虛擬環(huán)境中測試和驗(yàn)證收放卷的張力控制。除了張力控制還可以實(shí)現(xiàn)以下的基于工藝的對象仿真:
?柔版印刷機(jī)的定位
? 智能皮帶控制(多皮帶控制)
? 飛輪壓機(jī)
? 線性電機(jī)運(yùn)輸系統(tǒng)
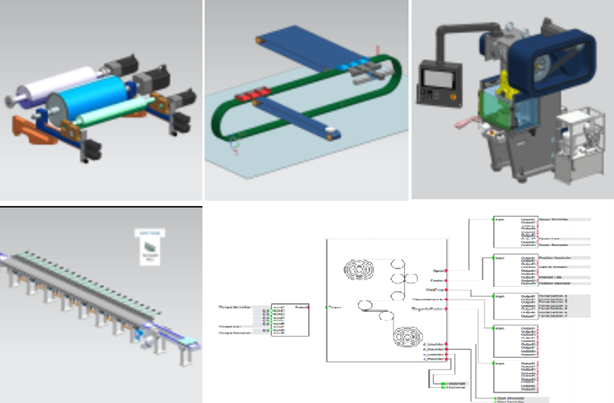
(應(yīng)用級別仿真模型)
4SINAMICS DriveSim 軟件解決方案
除了以上的現(xiàn)有方法之外,西門子在2021年漢諾威工業(yè)博覽會中,提出了一種新型的SINAMICS DriveSim 軟件解決方案,當(dāng)前提供的為此軟件的basic版本,是基于模型在環(huán)(MiL)的版本。使用DriveSim Basic時(shí),工程師無需為了仿真需要自行構(gòu)建驅(qū)動模型, DriveSim Basic軟件提供封閉且經(jīng)過測試的驅(qū)動模型。與使用仿真程序手動搭建仿真驅(qū)動器相比,使用DriveSim Basic可以節(jié)省大量的仿真準(zhǔn)備時(shí)間。
通過DriveSim快速簡單的模擬驅(qū)動器,可以搭建橋梁將PLC與機(jī)械模型結(jié)合起來。在設(shè)備設(shè)計(jì)前期,可以將計(jì)算出的負(fù)載曲線加載到TIA選型工具或SIZER中,進(jìn)而完成驅(qū)動選型。在設(shè)備調(diào)試階段,可以結(jié)合西門子PLCSIM Advanced或NX MCD,可實(shí)施具有高度一致性的統(tǒng)一的開發(fā)虛擬調(diào)試流程。DriveSim可兼容很多仿真程序,如Simit、Simcenter Amesim、NX Motion或者Matlab Simulink。
審核編輯:湯梓紅
-
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8271瀏覽量
146865 -
plc
+關(guān)注
關(guān)注
5016文章
13385瀏覽量
464870 -
仿真
+關(guān)注
關(guān)注
50文章
4124瀏覽量
133880 -
Profinet
+關(guān)注
關(guān)注
6文章
1214瀏覽量
23513 -
數(shù)字化
+關(guān)注
關(guān)注
8文章
8846瀏覽量
62059
原文標(biāo)題:數(shù)字化工廠仿真之驅(qū)動數(shù)字化仿真的四種方法
文章出處:【微信號:智能制造之家,微信公眾號:智能制造之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
傳感器采用四種方法減小醫(yī)療設(shè)備大小
Word技巧:快速實(shí)現(xiàn)雙面打印的四種方法
可以讓工具再次變得偉大的四種方法
使用單片機(jī)四種方法實(shí)現(xiàn)的LED閃燈程序資料免費(fèi)下載
HT32F5232學(xué)習(xí)之四種方法實(shí)現(xiàn)按鍵控制LED燈

改善您的模數(shù)轉(zhuǎn)換器系統(tǒng)電源抑制狀況的四種方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論