 為什么攝像頭接口對ADAS系統設計至關重要
為什么攝像頭接口對ADAS系統設計至關重要
看到周圍的環境
無論是汽車還是公共汽車,自動駕駛汽車都需要攝像頭、雷達,也許還需要激光雷達來感知周圍的完整環境。使用這些傳感器的組合,車輛的高級駕駛員輔助系統(ADAS)可以檢測車輛所有四個側面的世界。多個攝像機(少則五個,但通常多達八個)是系統的關鍵。前置和后置攝像頭需要靈敏度和快速響應,以幫助交叉交通和碰撞檢測,并迅速成為許多汽車和SUV的標準設備。所有環視攝像頭的組合為緊急制動輔助、自適應巡航控制、盲點檢測、后方交叉路口警報、車道偏離警告/自動車道保持以及即將推出的交通標志識別提供可靠的信息,因此您永遠不會超過公布的速度限制。
基本攝像系統
例如,特斯拉汽車上的最新硬件套件使用NVIDIA Drive PX 2處理平臺,該平臺從八個攝像頭,超聲波傳感器和雷達系統中獲取數據。該平臺從用于AutoCruise功能的手掌大小的節能模塊擴展到能夠完全自動駕駛的強大AI超級計算機。該系統可以實時了解車輛周圍發生的事情,在高清地圖上精確定位自己,并規劃安全的前進路徑。它結合了深度學習、傳感器融合和環繞視覺,以改變駕駛體驗。
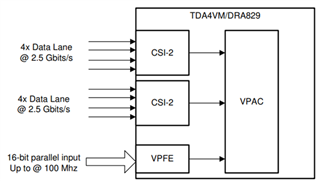
攝像頭系統的性能對于安全輔助或自動駕駛汽車至關重要。當然,攝像頭分布在車輛周圍,通常與CPU相距甚遠。它們的性能水平決定了ADAS可以看到物體的距離、可檢測到物體的尺寸以及信息可用的速度,具體取決于分辨率、動態范圍和幀速率。鑒于來自這些設備的信息的關鍵性質,它們無法容忍高錯誤率。它們還具有非常高的數據速率。在環視系統中,每個攝像頭通常具有分辨率為1280×800像素、幀刷新率為30 f/s的視頻流。
汽車世界使用許多總線或網絡,包括CAN,LIN,FlexRay,MOST,LVDS和以太網。但是視頻鏈路所需的數據速率排除了所有這些方法的使用,LVDS和以太網除外。
更好的解決方案
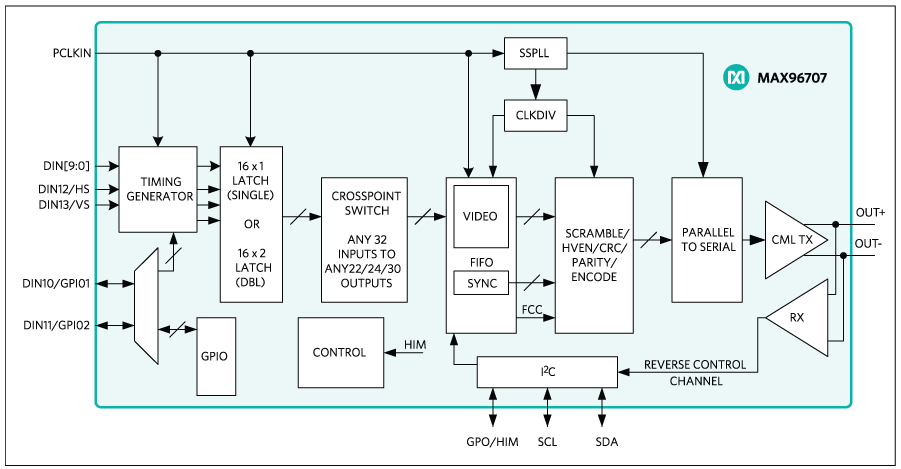
在千兆多媒體串行鏈路(GMSL)中可以找到更好的解決方案,它提供了以太網的無壓縮替代方案。因此,與以太網相比,GMSL 的數據速率提高了 10 倍,布線成本降低了 50%,EMC更好。Maxim提供MAX96707和MAX96708 GMSL串行器/解串器芯片,它們使用電流模式邏輯(CML)實現非常高的抗擾度,可通過低成本50 Ω同軸電纜或100 Ω雙絞線電纜發送長達15m的數據。它們以高達 1.74Gbps 的串行比特率與百萬像素相機配合使用。相機數據時鐘為 12.5MHz 至 87MHz,12 位 + H/V 數據或 36.66MHz 至 116MHz,12 位 + H/V 數據(使用內部編碼)。IC共享9.6kbps至1Mbps I2C控制通道彼此之間以及外部源以進行更新和設置。它們的特點是在檢測到錯誤時自動重新傳輸控制數據。控制通道多路復用到串行鏈路上,帶或不帶視頻通道均可使用。
MAX96707串行器IC具有可編程預加重/去加重功能,用于驅動較長的電纜。它具有視頻和控制數據的錯誤檢測功能,并具有用于雙攝像頭選擇的交叉點開關。其串行輸出提供可編程擴頻。該芯片采用小型 24 引腳 4 x 4mm TQFN 封裝,采用 1.7 至 1.9V 電源。最大電源電流為 88mA。
MAX96708解串器可以跟蹤來自擴頻串行輸入的數據,芯片的自適應均衡功能大大提高了誤碼率。輸出交叉點開關有助于提高靈活性。該 IC 的內核電源范圍為 1.7 至 1.9V,而 I/O 電源為 1.7 至 3.6V。該器件采用 32 引腳 5 x 5mm TQFN 封裝。
兩款芯片均工作在 -40o 至 115oC 的溫度范圍內,具有 ±8kV 觸點和 ±15kV 空氣 ESD 保護,符合 IEC 61000-4-2 和 ISO 10605 標準。兩者都符合汽車標準 AEC-Q100。
當然,如果我正在設計一個自動駕駛系統,一個關鍵的事情就是與攝像頭進行可靠的通信。我會仔細檢查實際車輛設置中所有攝像頭連接中的錯誤率,以及最壞情況下的噪音條件。在我看來,GMSL技術為這一關鍵領域的成功提供了最好的機會,同時滿足標準并提供高可靠性。
審核編輯:郭婷
-
以太網
+關注
關注
40文章
5460瀏覽量
172405 -
總線
+關注
關注
10文章
2900瀏覽量
88292 -
lvds
+關注
關注
2文章
1045瀏覽量
65946
發布評論請先 登錄
相關推薦
單目攝像頭和FPGA的ADAS產品原型系統
【案例分享】機器視覺應用的攝像頭設計
Jacinto7處理器攝像頭接入和ISP的處理能力
數字攝像頭介紹
數字系統轉變過程中高清攝像頭在監控市場的地位至關重要

攝像頭接口對ADAS系統設計至關重要
一文讀懂攝像頭接口對ADAS系統的重要意義資料下載

攝像頭接口設計對ADAS系統設計非常重要,那你知道是什么原因嗎?資料下載
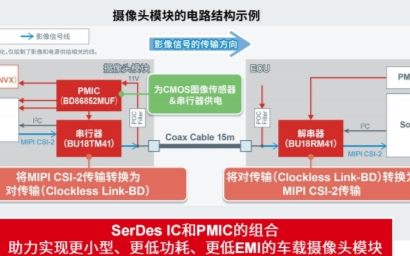
加速ADAS應用市場布局,ROHM推出適用于車載攝像頭模塊!
導熱材料解決汽車攝像頭散熱問題
攝像頭接口對ADAS系統設計至關重要
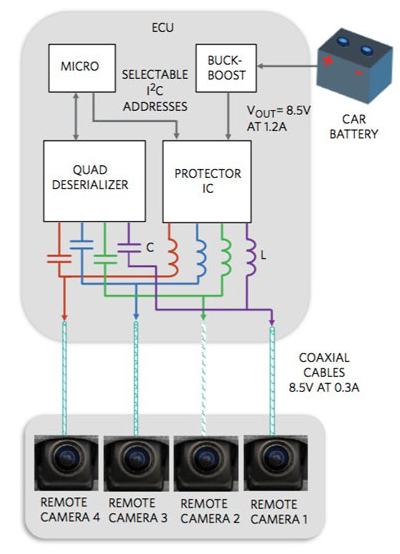
ASIL級攝像頭電源保護器保護您的車載攝像頭
Jacinto攝像頭接入與ISP處理
從您的ADAS攝像頭系統獲得更好的性能
淺談ADAS前置攝像頭設計挑戰






 工商網監
工商網監
評論