 簡要介紹ActiveSLAM的應用場景
簡要介紹ActiveSLAM的應用場景
1 前言
SLAM(The Simultaneous Localisation and Mapping)中文的意思是同時定位和地圖繪制,即將一個移動機器人(也可以是水下機器人(ROV)或者無人機(UAV))放置于一個位置環境中的一個未知位置,在沒有先驗圖的情況下,機器人可以自主地逐步構建周圍環境的一致地圖,同時可以在環境中確定自身的位置。SLAM問題自90年代提出以來,被視作移動機器人領域的“圣杯”,它是使機器人完全實現自主的手段,是機器人的核心技術之一。
對于SLAM技術的研究目前已經發展的比較成熟,框架也比較完善,但在技術落地的過程中免不了會遇到各種各樣的問題,學者將不同的方法引入SLAM框架進行完善,進而產生了各種各樣的SLAM方法,ActiveSLAM就是其中一種。
本篇文章先簡單介紹SLAM框架,然后會通過一個例子簡要介紹ActiveSLAM的應用場景,最后會對ActiveSLAM問題以及他的解決方案進行闡述。
2 SLAM簡述
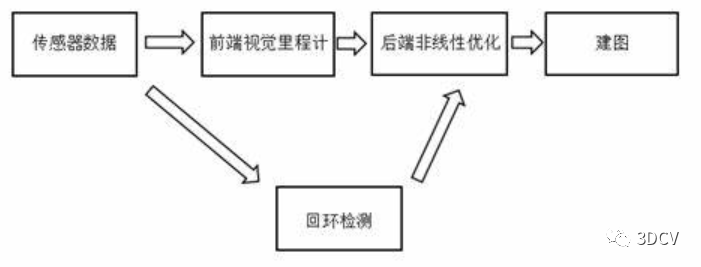
一個經典的視覺SLAM框架由五部分組成:傳感器的信息讀取、前端的視覺里程計、后端的優化、回環檢測、建圖。
傳感器信息讀取:在視覺SLAM中主要為相機圖像信息的讀取和預處理,在機器人系統中還包括編碼器、IMU等其他傳感器信息的讀取和融合。
前端視覺里程計(VO):用于估算相鄰圖像間相機的運動以及局部地圖的樣子。
后端(非線性)優化(Optimization):后端接受不同時刻視覺里程計測量的相機位姿,以及回環檢測的信息,對它們進行優化,得到全局一致的軌跡和地圖。
回環檢測(Loop Closure Detection):回環檢測判斷機器人是否到達過先前的位置。如果檢測到回環,它會把信息提供給后端進行處理。
建圖(Manning):它根據估計的軌跡,建立與任務要求對應的地圖。
3 一個例子
想象這樣一種情況:一架無人機要穿過某個地形,前往一個目標點進行物品運輸,無人機上配備視覺傳感器,通過SLAM技術實現自身定位,沿途有兩種選擇:
穿過沙漠前往目標點:距離更短,但特征紋理單一
穿過叢林前往目標點:距離稍長,但特征紋理豐富
在傳統情況下,可能會選擇穿過沙漠前往目標點,但是由于沙漠中特征紋理過于單一,無人機在穿越沙漠的過程中很有可能會出現里程計漂移甚至定位失敗的情況,這樣不僅不能完成任務,而且還會造成的巨大損失。
ActiveSLAM的提出就是為了解決這一問題,ActiveSLAM會將機器人導航過程中更多其他的信息(比如:定位精度、光照影響、安全因素等)加入到路徑選擇過程中,雖然有時候會付出一些代價(比如路徑更長,造成燃油等損耗的提高),但這些代價與考慮進去的信息相比往往無關痛癢;比如這里如果選擇穿過叢林前往目標點,雖然距離稍長,會造成一些燃油損耗,但由于叢林中有豐富的紋理信息,可以保證無人機的定位精度,使得無人機可以更安全到達目標點。
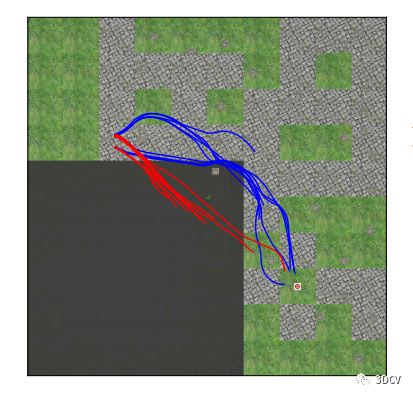
比如下面這張圖:藍色的路徑雖然距離更長,但由于沿途有豐富的紋理特征,可以順利地到達目標點;而紅色的路徑雖然距離更短,但由于紋理特征的缺失,很多導航都在半路失敗了,并沒有到達目標點。
4 Active SLAM問題概述
經典的SLAM問題的解決使得機器人擁有了在環境中自由移動的能力,但這也給運動規劃算法帶來了額外的限制。具體來說,機器人的運動會影響相機捕捉到的信息,從而影響感知算法的性能。換句話說,當機器人移動到一個位置時,相機捕捉到的信息可能不是最優的。因此SLAM界最近新興起了一種新型的SLAM算法,這種算法在進行運動規劃時需要考慮視覺感知的需求,這就是所謂的Active SLAM(主動SLAM)
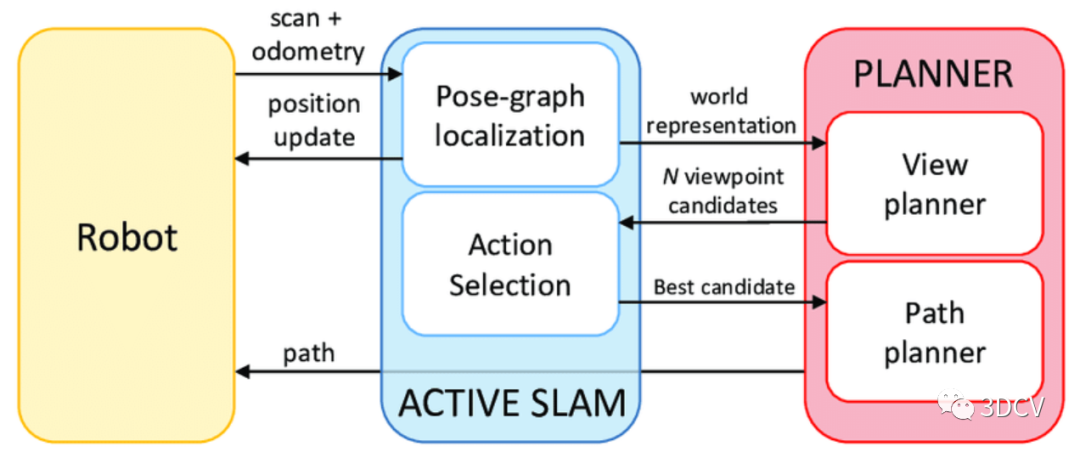
著名的ActiveSLAM框架包括模型預測控制(MPC)框架[1,2]和部分可觀察馬爾科夫決策過程(POMDP)形式化[3]。主動SLAM的目的是如何在探索新區域和重新訪問已知空間之間取得平衡,并為機器人選擇最優的未來軌跡。這涉及到了三個基本問題:
生成候選路徑
評價標準的選擇
在生成的路徑中選擇最優路徑
主動SLAM在現實中的意義也十分重大,許多農業任務,如灌溉、蟲害控制和施肥,都涉及覆蓋任務,并且是在沒有GPS全球定位信息的室內環境中進行的。為了避免SLAM結果中不確定性增長可能導致的較大漂移和任務失敗,主動SLAM是有利的。一般來說,在這項任務中,可以獲得溫室的粗略平面圖,并提供有關障礙的先驗信息。地圖的特征可以定義為來自圖像的普通視覺特征(如ORB特征和SIFT特征)和任何檢測到的對象(如水果和植物)。
5 Active SLAM問題解決方案
針對于上一節中提到的主動SLAM的三個基本問題, 我們分別論述其解決方案。
生成可用動作集(軌跡)的兩種主要方法是基于動態的方法和基于幾何的方法。在基于動態的方法中,未來候選軌跡是利用機器人模型或潛在信息場來獲得的。流行的MPC和POMDP框架都屬于這一類。基于幾何的方法的靈感來自于路徑規劃算法,如RRT,A和D*。然而,復雜環境下的實際系統很難滿足動態約束,這限制了這些方法的實用性。因此,動態方法比基于幾何的方法更受歡迎。
評價指標的選擇用于確定地圖或機器人位姿的不確定性,正確地解釋不確定性對于主動SLAM算法非常重要,特別是對于航位推算場景,在這種場景中機器人姿態的不確定性會增加。如果在這種情況下單調性不成立,主動SLAM算法可以在不確定性降低的錯誤信念下執行動作,常見的評價準則有有A-opt、D-opt和E-opt準則,它們用來計算預測的Fisher信息矩陣(FIM),A-opt和E-opt在一些情況下會失去單調性,而D-opt往往不會失去單調性[4,5]。
選擇最優軌跡是一個具有多約束的非凸非線性最優控制問題。直接方法是一種常見的解決方法,其中的問題是在離散優化領域中制定。減小了搜索空間的大小,但解是次優的;一個重要的示例是基于前沿的探索。其他方法的目的是在連續置信空間[6]中搜索局部最優策略。尋找主動SLAM的最優(甚至次優)解決方案仍然具有挑戰性。
審核編輯:劉清
-
傳感器
+關注
關注
2552文章
51383瀏覽量
755950 -
機器人
+關注
關注
211文章
28632瀏覽量
208061 -
編碼器
+關注
關注
45文章
3664瀏覽量
135098 -
MPC
+關注
關注
2文章
36瀏覽量
21252 -
SLAM
+關注
關注
23文章
426瀏覽量
31896
原文標題:淺析ActiveSLAM
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論