") 用于自動(dòng)駕駛的同步定位和建圖 (SLAM):概念和分析
用于自動(dòng)駕駛的同步定位和建圖 (SLAM):概念和分析
摘要
同步定位和建圖 (SLAM) 技術(shù)在過去幾十年取得了驚人的進(jìn)步,并引起了自動(dòng)駕駛社區(qū)的極大興趣。憑借其在導(dǎo)航和地圖繪制的概念根源,SLAM 優(yōu)于一些傳統(tǒng)的定位和定位技術(shù),因?yàn)樗梢灾С指煽亢头€(wěn)健的定位、規(guī)劃和控制以滿足自動(dòng)駕駛的一些關(guān)鍵標(biāo)準(zhǔn)。在這項(xiàng)研究中,作者首先概述了不同的 SLAM 實(shí)現(xiàn)方法,然后針對(duì)不同的駕駛場(chǎng)景、車輛系統(tǒng)組件和 SLAM 方法的特點(diǎn)討論了 SLAM 在自動(dòng)駕駛中的應(yīng)用。然后,作者討論了將 SLAM 應(yīng)用于自動(dòng)駕駛時(shí)的一些具有挑戰(zhàn)性的問題和當(dāng)前的解決方案。綜述了評(píng)估SLAM系統(tǒng)的特性和性能以及監(jiān)控SLAM估計(jì)風(fēng)險(xiǎn)的一些定量質(zhì)量分析方法。
此外,本研究還描述了一個(gè)真實(shí)世界的道路測(cè)試,以展示用于自動(dòng)駕駛的基于多傳感器的現(xiàn)代化 SLAM 程序。數(shù)值結(jié)果表明,結(jié)合激光雷達(dá)和 GNSS/INS 的 SLAM 程序可以生成高精度 3D 點(diǎn)云地圖。基于此預(yù)生成地圖和在線激光雷達(dá)掃描與緊密融合的慣性系統(tǒng)匹配,可以實(shí)現(xiàn)在線四到五厘米精度定位解決方案。本研究描述了一個(gè)真實(shí)世界的道路測(cè)試,以展示用于自動(dòng)駕駛的基于多傳感器的現(xiàn)代化 SLAM 程序。數(shù)值結(jié)果表明,結(jié)合激光雷達(dá)和 GNSS/INS 的 SLAM 程序可以生成高精度 3D 點(diǎn)云地圖。
基于此預(yù)生成地圖和在線激光雷達(dá)掃描與緊密融合的慣性系統(tǒng)匹配,可以實(shí)現(xiàn)在線四到五厘米精度定位解決方案。本研究描述了一個(gè)真實(shí)世界的道路測(cè)試,以展示用于自動(dòng)駕駛的基于多傳感器的現(xiàn)代化 SLAM 程序。數(shù)值結(jié)果表明,結(jié)合激光雷達(dá)和 GNSS/INS 的 SLAM 程序可以生成高精度 3D 點(diǎn)云地圖。基于此預(yù)生成地圖和在線激光雷達(dá)掃描與緊密融合的慣性系統(tǒng)匹配,可以實(shí)現(xiàn)在線四到五厘米精度定位解決方案。
一、簡(jiǎn)介
自主(也稱為自動(dòng)駕駛、無人駕駛或機(jī)器人)車輛操作是一個(gè)重要的學(xué)術(shù)和工業(yè)研究課題。據(jù)預(yù)測(cè),全自動(dòng)駕駛汽車將成為未來幾十年汽車總銷量的重要組成部分。自動(dòng)駕駛汽車的推廣引起了人們對(duì)許多優(yōu)勢(shì)的關(guān)注,例如為殘疾人或老年人提供服務(wù)、減輕駕駛員壓力和成本、減少道路事故、消除對(duì)傳統(tǒng)公共交通服務(wù)的需求等。[ 1 , 2 ] .
典型的自動(dòng)駕駛汽車系統(tǒng)包含四個(gè)關(guān)鍵部分:定位、感知、規(guī)劃和控制(圖 1)。定位是獲取(移動(dòng)或靜態(tài))對(duì)象相對(duì)于給定坐標(biāo)系的坐標(biāo)的過程。坐標(biāo)系可以是局部坐標(biāo)系或大地基準(zhǔn),例如WGS84。定位是估計(jì)載體相對(duì)于參考系或地圖的姿態(tài)(位置和姿態(tài))的過程。感知系統(tǒng)監(jiān)測(cè)本車周圍的道路環(huán)境,識(shí)別感興趣的對(duì)象,如行人、其他車輛、紅綠燈、指示牌等。
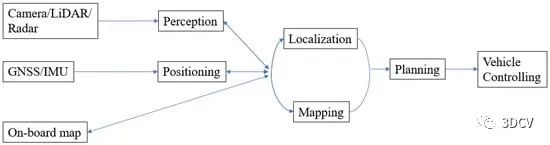
圖 1. 自動(dòng)駕駛系統(tǒng)的功能組件。
通過確定周圍環(huán)境中物體的坐標(biāo),可以生成地圖。此過程稱為建圖。
路徑規(guī)劃是利用定位、建圖和感知信息來確定后續(xù)駕駛時(shí)期的最佳路徑,將自動(dòng)駕駛車輛從一個(gè)位置引導(dǎo)到另一個(gè)位置的步驟。然后使用控制系統(tǒng)組件將該計(jì)劃轉(zhuǎn)化為行動(dòng),例如,在檢測(cè)到交通燈之前進(jìn)行制動(dòng)控制等。
所有這些部分都是密切相關(guān)的。車輛和道路實(shí)體的位置信息可以通過結(jié)合位置、感知和地圖信息來獲得。相比之下,定位和建圖可用于支持更好的感知。準(zhǔn)確的定位和感知信息對(duì)于正確的規(guī)劃和控制至關(guān)重要。
為實(shí)現(xiàn)全自動(dòng)駕駛,定位和感知步驟需要考慮一些關(guān)鍵要求。首先是準(zhǔn)確性。對(duì)于自動(dòng)駕駛,有關(guān)道路位置和車輛在車道內(nèi)位置的信息支持規(guī)劃和控制步驟。為了實(shí)現(xiàn)這些,并確保車輛安全,對(duì)車道級(jí)別甚至“where-in-lane”級(jí)別(即子車道級(jí)別)的位置估計(jì)有嚴(yán)格的要求。識(shí)別范圍很重要,因?yàn)橐?guī)劃和控制步驟需要足夠的處理時(shí)間讓車輛做出反應(yīng) [ 3]. 魯棒性意味著定位和感知應(yīng)該對(duì)駕駛時(shí)的任何變化具有魯棒性,例如駕駛場(chǎng)景(城市、高速公路、隧道、鄉(xiāng)村等)、照明條件、天氣等。
傳統(tǒng)的車輛定位和感知技術(shù)無法滿足上述所有要求。例如,由于信號(hào)可能被樹木、城市峽谷、隧道等扭曲甚至阻擋,因此會(huì)出現(xiàn) GNSS 誤差。慣性導(dǎo)航系統(tǒng) (INS) 通常用于在 GNSS 信號(hào)中斷期間支持導(dǎo)航,以繼續(xù)提供位置、速度和高度信息。然而,慣性測(cè)量偏差需要經(jīng)常估計(jì)校正或校準(zhǔn),最好使用 GNSS 測(cè)量來實(shí)現(xiàn)。然而,集成的 GNSS/INS 系統(tǒng)仍然不夠,因?yàn)楦叨茸詣?dòng)化駕駛不僅需要宿主車輛的定位信息,還需要周圍環(huán)境中物體的空間特征。因此,感知傳感器,例如激光雷達(dá)和相機(jī),通常用于定位和感知。激光雷達(dá)可以直接獲取 3D 點(diǎn)云,并借助 GNSS 和 INS 繪制環(huán)境地圖,在城市道路行駛條件下精度可達(dá)厘米級(jí) [4 ]。然而,高昂的成本限制了激光雷達(dá)系統(tǒng)在車輛中的商業(yè)應(yīng)用。此外,其準(zhǔn)確性受天氣(例如下雨)和照明條件的影響。與激光雷達(dá)相比,攝像頭系統(tǒng)的精度較低,但也會(huì)受到眾多誤差源的影響 [ 5、6 ]。然而,它們更便宜、體積更小、需要更少的維護(hù)并且使用更少的能源。基于視覺的系統(tǒng)可以提供豐富的環(huán)境信息,類似于人眼可以感知的信息,并且數(shù)據(jù)可以與其他傳感器融合以確定檢測(cè)到的特征的位置。
具有豐富道路環(huán)境信息的地圖對(duì)于上述傳感器實(shí)現(xiàn)準(zhǔn)確和穩(wěn)健的定位和感知至關(guān)重要。預(yù)先存儲(chǔ)的道路信息使自動(dòng)駕駛對(duì)不斷變化的環(huán)境和道路動(dòng)態(tài)具有魯棒性。由于車載地圖可以及時(shí)提供路網(wǎng)信息,因此可以滿足識(shí)別范圍要求。已經(jīng)使用不同類型的地圖信息研究了基于地圖的定位和導(dǎo)航。谷歌地圖就是一個(gè)例子,因?yàn)樗峁┤虻貓D信息,包括圖像、地形細(xì)節(jié)和衛(wèi)星圖像 [ 7 ],并且可以通過手機(jī)和車輛應(yīng)用程序獲得。但是,地圖的使用將受到地圖精度的限制,并且在某些選定區(qū)域中,地圖的分辨率可能不足。在 [ 8],作者通過結(jié)合來自其他傳感器的數(shù)據(jù)來考慮用于導(dǎo)航的低精度地圖。他們使用激光雷達(dá)數(shù)據(jù)檢測(cè)移動(dòng)物體,并使用帶有粗略開源 GIS 地圖的 GNSS/INS 系統(tǒng)。他們的結(jié)果表明他們的融合技術(shù)可以成功地檢測(cè)和跟蹤移動(dòng)物體。[ 9 ]中提出了一種使用 3D 激光雷達(dá)傳感器和高精度地圖的基于路緣地圖的精確定位方法。但是,當(dāng)路緣信息缺失或受阻時(shí),此方法將失敗。
最近,所謂的“高清”(HD) 地圖在自動(dòng)駕駛的背景下受到了極大的關(guān)注,因?yàn)樗鼈儼浅?zhǔn)確且大量的道路網(wǎng)絡(luò)信息 [10 ]。據(jù)商業(yè)高清地圖市場(chǎng)的一些主要參與者稱,已經(jīng)達(dá)到 10-20 厘米的精度[ 11、12】,預(yù)計(jì)在下一代高精地圖中,精度將達(dá)到幾厘米。此類地圖包含大量道路特征信息,不僅包括靜態(tài)道路實(shí)體和道路幾何形狀(曲率、坡度等),還包括交通管理信息,如交通標(biāo)志、紅綠燈、限速、道路標(biāo)記等。自動(dòng)駕駛汽車可以使用高精地圖精確定位主車在車道內(nèi),并通過將車載傳感器識(shí)別的地標(biāo)與車道內(nèi)預(yù)存信息進(jìn)行匹配,估計(jì)汽車相對(duì)于道路物體的相對(duì)位置。高清地圖。
因此,地圖,尤其是高清地圖,在支持自動(dòng)駕駛方面發(fā)揮著多種作用,可能能夠滿足準(zhǔn)確度、精確度、識(shí)別距離、魯棒性和信息豐富度等嚴(yán)苛要求。然而,同時(shí)定位與建圖(SLAM)等技術(shù)也促進(jìn)了“地圖”在自動(dòng)駕駛中的應(yīng)用。SLAM 是移動(dòng)平臺(tái)構(gòu)建環(huán)境地圖并同時(shí)使用該地圖推斷其位置的過程。廣泛應(yīng)用于機(jī)器人領(lǐng)域的 SLAM 已被證明 [ 13、14 ] 適用于自動(dòng)駕駛車輛操作,因?yàn)樗粌H可以支持精確的地圖生成,還可以在先前生成的地圖中進(jìn)行在線定位。
通過適當(dāng)?shù)膫鞲衅餍畔ⅲǜ兄獢?shù)據(jù)、絕對(duì)和航位推算位置信息),可以通過 SLAM 離線生成高密度和精確的地圖。駕駛時(shí),自動(dòng)駕駛汽車可以通過將傳感器數(shù)據(jù)與地圖進(jìn)行匹配,在預(yù)先存儲(chǔ)的地圖中定位自己。SLAM 還可用于解決 DATMO(移動(dòng)物體的檢測(cè)和跟蹤)問題 [ 15] 這對(duì)于檢測(cè)行人或其他移動(dòng)物體很重要。由于環(huán)境的靜態(tài)部分由 SLAM 定位和建圖,因此可以同時(shí)檢測(cè)和跟蹤相對(duì)于靜態(tài)對(duì)象或特征的動(dòng)態(tài)組件。然而,SLAM 在應(yīng)用于自動(dòng)駕駛應(yīng)用時(shí)也存在一些具有挑戰(zhàn)性的問題。例如,“閉環(huán)”可用于減少室內(nèi)或城市場(chǎng)景中 SLAM 估計(jì)中的累積偏差,但通常不適用于高速公路場(chǎng)景。
本文將回顧SLAM的一些關(guān)鍵技術(shù),SLAM在自動(dòng)駕駛中的應(yīng)用,以及與應(yīng)用相關(guān)的合適的SLAM技術(shù)。第 2 節(jié)簡(jiǎn)要介紹了一些關(guān)鍵 SLAM 技術(shù)的原理和特點(diǎn)。第 3 節(jié)描述了 SLAM 在自動(dòng)駕駛中的一些潛在應(yīng)用。第 4 節(jié)討論了將 SLAM 技術(shù)應(yīng)用于自動(dòng)駕駛的一些具有挑戰(zhàn)性的問題。第 5 節(jié)描述了一個(gè)真實(shí)世界的道路測(cè)試,以顯示基于多傳感器的自動(dòng)駕駛 SLAM 程序的性能。結(jié)論在第 6 節(jié)中給出。
2. 關(guān)鍵SLAM技術(shù)
自 1986 年首次推出 [ 16 ] 以來,已經(jīng)開發(fā)了多種 SLAM 技術(shù)。SLAM 的概念根源于大地測(cè)量學(xué)和地理空間建圖 [ 17 ]。
一般來說,有兩種類型的 SLAM 估計(jì)方法:基于濾波器和基于優(yōu)化。兩種方法同時(shí)估計(jì)車輛姿態(tài)狀態(tài)和地圖狀態(tài)。車輛姿態(tài)包括 3D 或 2D 車輛位置,但有時(shí)還包括速度、方向或姿態(tài),具體取決于所使用的傳感器和應(yīng)用程序。
2.1. 在線和離線 SLAM
圖 2和圖 3說明了兩種一般的 SLAM 實(shí)現(xiàn):在線 SLAM 和離線 SLAM(有時(shí)稱為全 SLAM)。根據(jù) [ 18 ],全 SLAM 試圖計(jì)算整個(gè)路徑上的變量以及地圖,而不僅僅是當(dāng)前位姿,而在線 SLAM 問題是通過從全 SLAM 問題中刪除過去的位姿來解決的。
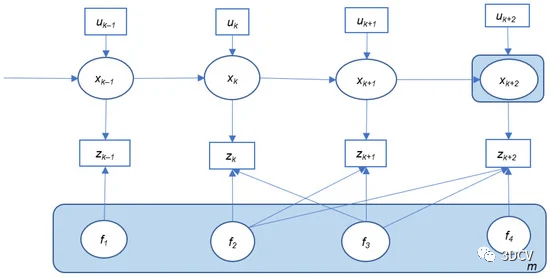
圖 2. 在線 SLAM 描述
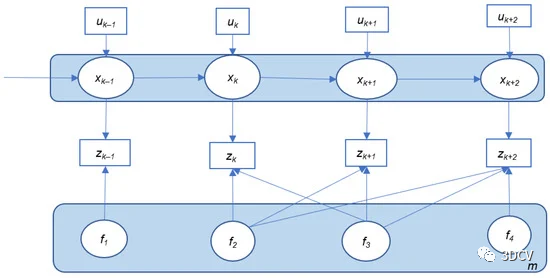
圖 3. 離線 SLAM 描述。
這里,x k代表車輛在時(shí)間k的位姿(位置、姿態(tài)、速度等) 。m是由存儲(chǔ)的地標(biāo) ( f 1 – f 4 ) 及其位置狀態(tài)組成的地圖。u k是控制輸入,表示時(shí)間段k ? 1 和k之間的車輛運(yùn)動(dòng)信息,例如加速度、轉(zhuǎn)角等,可以從車輪編碼器或慣性傳感器等車輛運(yùn)動(dòng)傳感器獲取。在某個(gè)時(shí)期k,機(jī)載傳感器(如 Camera、Lidar 和 Radar)將感知環(huán)境并檢測(cè)一個(gè)或多個(gè)地標(biāo)。車輛和所有觀察到的地標(biāo)之間的相對(duì)觀察表示為z k。有了這些信息,就可以估計(jì)變量(包括車輛姿態(tài)和地圖狀態(tài))。
圖 2和圖 3中的藍(lán)色背景矩形表示在這兩個(gè)實(shí)現(xiàn)中估計(jì)的狀態(tài)變量。在大多數(shù)情況下,對(duì)于在線 SLAM,在生成地圖并使用最新測(cè)量值(u k +2和z k +2 )更新地圖時(shí),僅估計(jì)當(dāng)前車輛位姿x k +2,而在離線情況下SLAM實(shí)現(xiàn),車輛的整個(gè)軌跡連同整個(gè)地圖一起更新。所有可用的控制和觀察測(cè)量將一起用于離線 SLAM 實(shí)施。
然而,隨著SLAM算法的發(fā)展和計(jì)算能力的提高,可以使用高效的SLAM算法實(shí)時(shí)獲得完整的SLAM解決方案,也可以將其視為在線問題。因此,在線或離線實(shí)施 SLAM 方法可能取決于它所需的測(cè)量輸入(控制和觀察)是來自當(dāng)前/歷史還是來自未來的時(shí)代,以及它的處理時(shí)間(實(shí)時(shí)或非實(shí)時(shí))。
2.2. 基于濾波器的 SLAM
基于濾波器的 SLAM 分兩步遞歸地解決 SLAM 問題。首先,使用處理模型和控制輸入來預(yù)測(cè)車輛和地圖狀態(tài)。在下一步中,使用當(dāng)前傳感器觀測(cè)值對(duì)預(yù)測(cè)狀態(tài)進(jìn)行校正。因此,基于濾波器的 SLAM 適用于在線 SLAM。
基于擴(kuò)展卡爾曼濾波器的 SLAM (EKF-SLAM) 代表了 SLAM 問題的標(biāo)準(zhǔn)解決方案。它源自貝葉斯過濾,其中所有變量都被視為高斯隨機(jī)變量。它包括兩個(gè)步驟:時(shí)間更新(預(yù)測(cè))和測(cè)量更新(過濾)。在每個(gè)時(shí)期,測(cè)量和運(yùn)動(dòng)模型都被線性化(使用當(dāng)前狀態(tài)和一階泰勒展開)。然而,由于線性化不是圍繞狀態(tài)向量的真實(shí)值進(jìn)行的,而是圍繞估計(jì)值 [ 19 ] 進(jìn)行的,因此線性化誤差會(huì)累積并可能導(dǎo)致估計(jì)發(fā)散。因此,可能會(huì)出現(xiàn)不一致。
與 EKF-SLAM 相關(guān)的另一個(gè)問題是地圖尺寸的不斷擴(kuò)大,這使得大規(guī)模 SLAM 的二次計(jì)算過程變得不切實(shí)際。對(duì)于自動(dòng)駕駛來說,復(fù)雜的道路環(huán)境和較長的行駛周期會(huì)引入大量的特征,使得實(shí)時(shí)計(jì)算不可行。為了提高計(jì)算效率,人們開發(fā)了大量的算法。例如,壓縮擴(kuò)展卡爾曼濾波器 (CEKF) [ 20 ] 算法可以通過關(guān)注局部區(qū)域然后將過濾后的信息擴(kuò)展到全球地圖來顯著減少計(jì)算量。具有子圖的算法也已用于解決計(jì)算問題[ 21、22、23、24]. 當(dāng)舊地圖達(dá)到預(yù)定義的地圖大小時(shí),使用新的空白地圖替換舊地圖。維護(hù)更高級(jí)別的地圖以跟蹤每個(gè)子地圖之間的鏈接。
還有一些其他基于濾波器的 SLAM 方法,例如卡爾曼濾波器的一些變體。其中之一,信息濾波器 (IF),以狀態(tài)誤差協(xié)方差矩陣的逆形式傳播,這使得該方法更加穩(wěn)定 [ 25 ]。這種方法在多車 SLAM 中比在單車系統(tǒng)中更受歡迎。
另一類基于濾波器的 SLAM 技術(shù)是近年來流行的粒子濾波器 (PF)。PF 通過代表貝葉斯后驗(yàn)概率的一組隨機(jī)點(diǎn)簇(或粒子)執(zhí)行順序蒙特卡洛(SMC)估計(jì)。在 [ 26 ]中提出了 Rao-Blackwellized 粒子濾波器。Fast-SLAM 是一種流行的實(shí)現(xiàn)方式,它將機(jī)器人位置分布視為一組 Rao-Blackwellized 粒子,并使用 EKF 來維護(hù)局部地圖。這樣一來,SLAM的計(jì)算復(fù)雜度就大大降低了。Fast-SLAM [ 27 ]可以實(shí)現(xiàn)實(shí)時(shí)應(yīng)用,使自動(dòng)駕駛的在線 SLAM 成為可能。與 EKF 相比的另一個(gè)優(yōu)勢(shì)是粒子濾波器可以處理非線性運(yùn)動(dòng)模型 [ 28]. 然而,根據(jù) [ 29、30 ],F(xiàn)ast-SLAM 由于無法忘記過去而遭受退化。如果邊緣化地圖并在執(zhí)行重采樣時(shí),統(tǒng)計(jì)準(zhǔn)確性就會(huì)丟失。
2.3. 基于優(yōu)化的 SLAM
Full SLAM 使用整個(gè)傳感器數(shù)據(jù)估計(jì)所有車輛姿態(tài)和地圖狀態(tài),并且主要基于優(yōu)化。與基于濾波器的 SLAM 類似,基于優(yōu)化的 SLAM 系統(tǒng)由兩個(gè)主要部分組成:前端和后端。在前端步驟中,SLAM系統(tǒng)通過傳感器數(shù)據(jù)提取問題的約束條件,例如,通過執(zhí)行特征檢測(cè)和匹配、運(yùn)動(dòng)估計(jì)、閉環(huán)檢測(cè)等。然后應(yīng)用非線性優(yōu)化來獲得最大似然估計(jì)在后端。
圖 SLAM 是全 SLAM 的主要類別之一,它使用圖形結(jié)構(gòu)來表示貝葉斯 SLAM。所有平臺(tái)沿整個(gè)軌跡構(gòu)成,所有檢測(cè)到的特征都被視為節(jié)點(diǎn)。姿勢(shì)之間的空間約束被編碼在節(jié)點(diǎn)之間的邊緣中。這些約束來自觀察、里程計(jì)測(cè)量和閉環(huán)約束。圖構(gòu)建后,應(yīng)用圖優(yōu)化以優(yōu)化整個(gè)軌跡和地圖的圖模型。為了求解全優(yōu)化和計(jì)算后驗(yàn)的高斯近似,可以使用多種方法,例如 Gauss–Newton 或 Levenberg–Marquardt [31 ]。
對(duì)于基于圖的 SLAM,其協(xié)方差矩陣的大小和更新時(shí)間在生成圖后是恒定的,因此圖 SLAM 已成為構(gòu)建大規(guī)模地圖的流行方法。降低優(yōu)化步驟的計(jì)算復(fù)雜度已成為實(shí)際實(shí)現(xiàn)高維 SLAM 問題的主要研究課題之一。有效解決優(yōu)化步驟的關(guān)鍵是法線矩陣的稀疏性。每個(gè)測(cè)量?jī)H與非常有限數(shù)量的變量相關(guān)聯(lián)的事實(shí)使得矩陣非常稀疏。利用Cholesky分解和QR分解方法,可以有效地分解信息矩陣和測(cè)量雅可比矩陣,從而顯著降低計(jì)算成本。已經(jīng)提出了幾種算法,例如TORO和g2o。32、33、34、35、36 ]。_ _ _ _ _ _ _ 子地圖可以獨(dú)立優(yōu)化并與局部坐標(biāo)系相關(guān)。子地圖坐標(biāo)可以被視為姿勢(shì)節(jié)點(diǎn),與運(yùn)動(dòng)約束或閉環(huán)約束相關(guān)聯(lián)。因此,生成了全局位姿圖。以這種方式,計(jì)算復(fù)雜度和更新時(shí)間將得到改進(jìn)。
Smoothing and Mapping (SAM) 是另一種基于優(yōu)化的 SLAM 算法,是一種非線性最小二乘問題。這樣的最小二乘問題可以通過增量平滑和建圖 (iSAM) [ 37 ] 和 iSAM2 [ 38 ] 逐步解決。在線 SLAM 可以通過增量 SAM 獲得,因?yàn)樗鼈儽苊饬藢?duì)整個(gè)協(xié)方差矩陣進(jìn)行不必要的計(jì)算。iSAM2 更高效,因?yàn)樗褂秘惾~斯樹來獲得增量變量重新排序和流體重新線性化。
SLAM++ 是另一種基于非線性最小二乘優(yōu)化的 SLAM 增量解決方案,非常高效。此外,對(duì)于在線 SLAM 實(shí)現(xiàn),快速狀態(tài)協(xié)方差恢復(fù)對(duì)于數(shù)據(jù)關(guān)聯(lián)、獲得簡(jiǎn)化狀態(tài)表示、主動(dòng)決策和下一個(gè)最佳視圖非常重要 [39、40 ]。SLAM++ 有一個(gè)優(yōu)勢(shì),因?yàn)樗试S增量協(xié)方差計(jì)算,這比其他實(shí)現(xiàn)更快[ 40 ]。
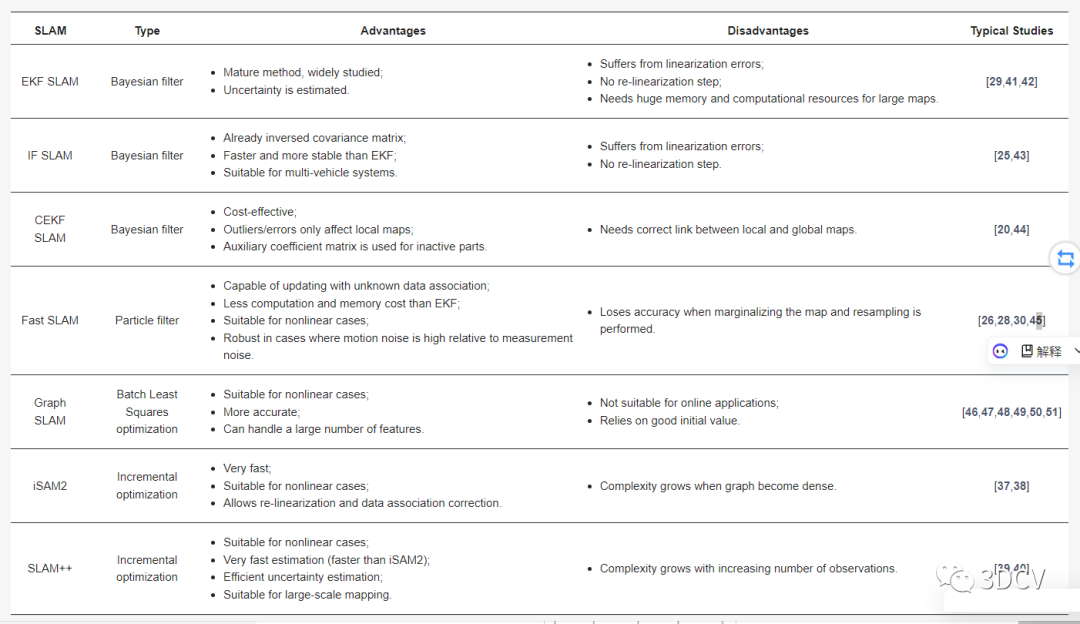
表 1總結(jié)了一些典型的 SLAM 技術(shù)的特征。請(qǐng)注意,Graph SLAM 利用所有可用的觀察和控制信息,可以實(shí)現(xiàn)非常準(zhǔn)確和穩(wěn)健的估計(jì)結(jié)果。它適用于離線應(yīng)用,其性能依賴于良好的初始狀態(tài)猜測(cè)。Filter-based SLAM 用于在線估計(jì)時(shí)更適合小規(guī)模環(huán)境,但對(duì)于復(fù)雜環(huán)境,傳統(tǒng)的 EKF-SLAM 可能難以進(jìn)行實(shí)時(shí)計(jì)算。應(yīng)考慮其他變體或 fastSLAM。增量?jī)?yōu)化方法可以進(jìn)行增量更新,從而以非常高的效率實(shí)時(shí)地提供大比例尺地圖的最優(yōu)估計(jì)。
表 1. 一些典型 SLAM 技術(shù)的特征
2.4. SLAM 的傳感器和融合方法
由于傳感器和計(jì)算技術(shù)的進(jìn)步,出現(xiàn)了新的 SLAM 方法。這些方法在后端估計(jì)步驟也是基于優(yōu)化或基于過濾的,而前端步驟高度依賴于不同傳感器模式的應(yīng)用。用于 SLAM 的兩個(gè)主要傳感器是激光雷達(dá)和相機(jī)。與其他傳感器相比,激光雷達(dá)方法因其簡(jiǎn)單性和準(zhǔn)確性而變得流行 [ 52 ]。基于激光雷達(dá)的定位和建圖的核心是掃描匹配,恢復(fù)兩個(gè)掃描或點(diǎn)云的相對(duì)位置和方向。流行的掃描匹配方法包括迭代壁櫥點(diǎn) (ICP) 算法及其變體[ 53、54、55],以及正態(tài)分布變換 (NDT) [ 56 ]。這些方法高度依賴于良好的初始猜測(cè),并受到局部最小值 [ 57、58 ]的影響。其他一些匹配方法包括概率方法,例如相關(guān)掃描匹配 (CSM) [ 59 ]、基于特征的方法 [ 57、60 ]等。許多掃描匹配方法專注于初始免于初始化錯(cuò)誤或?qū)Τ跏蓟e(cuò)誤具有魯棒性,但它們?nèi)匀幻媾R計(jì)算效率的挑戰(zhàn)。
一些可用于 SLAM 估計(jì)的距離傳感器是雷達(dá)和聲納/超聲波傳感器。雷達(dá)的工作方式與激光雷達(dá)類似,但該系統(tǒng)發(fā)射無線電波而不是光來測(cè)量到物體的距離。此外,由于雷達(dá)可以使用測(cè)量的多普勒頻移 [ 61 ]來觀察傳感器與物體之間的相對(duì)速度,因此適用于區(qū)分靜止物體和運(yùn)動(dòng)物體,并可用于在建圖過程中丟棄運(yùn)動(dòng)物體 [ 62 ]。在[ 42 , 62 , 63 , 64 , 65 , 66中可以找到一些關(guān)于將雷達(dá)用于 SLAM 的研究]. 與激光雷達(dá)相比,低價(jià)格、低功耗和對(duì)大氣條件的敏感性較低,使其非常適合戶外應(yīng)用。然而,雷達(dá)的測(cè)量分辨率較低,其檢測(cè)比激光雷達(dá)更稀疏。因此,很難匹配雷達(dá)數(shù)據(jù)和處理數(shù)據(jù)關(guān)聯(lián)問題,這導(dǎo)致其 3D 建圖不太準(zhǔn)確。
聲納/超聲波傳感器還通過發(fā)送和接收聲波來測(cè)量飛行時(shí)間 (TOF) 以確定到物體的距離。基于聲納的 SLAM 最初用于水下 [ 67、68 ] 和室內(nèi) [ 69 ]應(yīng)用。由于其低成本和低功耗,它已變得流行。它不受能見度限制的影響,可用于多種表面類型 [ 70]. 然而,與雷達(dá)類似,它獲取的信息稀疏,并且存在特征提取不準(zhǔn)確和處理時(shí)間長的問題。因此,它在高速車輛應(yīng)用中的用途有限。此外,聲納/超聲波傳感器的感應(yīng)范圍有限,可能會(huì)受到環(huán)境噪聲和其他使用相同頻率超聲波的平臺(tái)的影響[ 71 ]。
相機(jī)是另一種流行的 SLAM 傳感器。已經(jīng)開發(fā)了不同的技術(shù),例如單目[ 72、73 ] 、立體[ 74、75、76、77 ]和多攝像頭[ 78、79、80、81 ] 。這些技術(shù)可用于各種環(huán)境,包括室內(nèi)和室外。單攝像頭系統(tǒng)易于部署,但存在規(guī)模不確定性[ 82 ]。立體相機(jī)系統(tǒng)可以克服比例因子問題,并且可以通過從兩個(gè)不同的角度比較同一場(chǎng)景來檢索 3D 結(jié)構(gòu)信息 [ 61]]. 多相機(jī)系統(tǒng)受到越來越多的關(guān)注,特別是當(dāng)它們實(shí)現(xiàn)大視野 [ 78 ] 或者甚至能夠?qū)崿F(xiàn)全景視覺 [ 81 ] 時(shí)。該系統(tǒng)在復(fù)雜環(huán)境中更加穩(wěn)健,而單傳感器系統(tǒng)可能非常容易受到環(huán)境干擾[ 81 ]。然而,相機(jī)的集成需要額外的軟件和硬件,并且需要更多的校準(zhǔn)和同步工作[ 71、83 ]。另一種特殊的相機(jī),RGB-D 相機(jī),已經(jīng)被 SLAM 和計(jì)算機(jī)視覺社區(qū)研究 [ 84 , 85 , 86 , 87 , 88 , 89, 90 , 91 ] 因?yàn)樗梢灾苯荧@取深度信息。然而,該系統(tǒng)主要適用于室內(nèi)環(huán)境,因?yàn)樗褂?a href="http://m.1cnz.cn/tags/紅外/" target="_blank">紅外光譜光,因此對(duì)外部照明敏感[ 70 ]。
根據(jù)測(cè)量的使用方式,視覺 SLAM 也可以分為基于特征的或直接的 SLAM。基于特征的 SLAM 反復(fù)檢測(cè)圖像中的特征,并利用描述性特征進(jìn)行跟蹤和深度估計(jì) [ 92 ]。這種基于特征的系統(tǒng)的一些基本框架包括 MonoSLAM [ 72、93 ]、PTAM [ 94 ] 、 ORB -SLAM [ 95 ] 和 ORB-SLAM2 [ 96 ]。直接 SLAM 方法不使用任何特征檢測(cè)器和描述符,而是使用整個(gè)圖像。直接 SLAM 的示例包括 DTAM [ 97 ]、LSD-SLAM [ 73 ] 和 SVO [ 98]]. 這些方法可以獲得密集或半密集的環(huán)境模型,這使得它們比基于特征的方法對(duì)計(jì)算的要求更高。恩格爾等。[ 74 ] 將 LSD-SLAM 從單眼模型擴(kuò)展到立體模型,而 Caruso 等人。[ 99 ] 將 LSD-SLAM 擴(kuò)展到全向模型。視覺SLAM的詳細(xì)回顧可以在 [ 5 ]和[ 70、92、100、101 ]中找到。
這些感知傳感器中的每一個(gè)都有其優(yōu)點(diǎn)和局限性。激光雷達(dá)方法可以提供精確和遠(yuǎn)距離的觀測(cè),但存在一些局限性,例如對(duì)大氣條件敏感、價(jià)格昂貴且目前相當(dāng)笨重。雷達(dá)系統(tǒng)成本相對(duì)較低,但比 3D 建圖更適合對(duì)象檢測(cè)。聲納/超聲波傳感器不適合高速平臺(tái)應(yīng)用。相機(jī)成本低,即使使用多個(gè)相機(jī)也是如此。相機(jī)還可以提供豐富的視覺信息。然而,它們對(duì)環(huán)境紋理和光線敏感,并且通常具有很高的計(jì)算要求。因此,一種流行的策略是組合多種傳感器,使 SLAM 系統(tǒng)更加魯棒。
有幾種策略可以為 SLAM 集成來自不同傳感器的數(shù)據(jù)。一種是融合獨(dú)立處理的傳感器結(jié)果,然后獲得最終解決方案。在[ 102 ]中,提出了一種將激光和立體相機(jī)測(cè)量分別生成的兩個(gè)網(wǎng)格圖合并為單個(gè)網(wǎng)格圖的建圖方法。在這種方法中,需要將不同傳感器的測(cè)量值建圖到一個(gè)聯(lián)合參考系統(tǒng)。在 [ 103],一種多傳感器 SLAM 系統(tǒng),結(jié)合了激光讀數(shù)的 3-DoF 姿態(tài)估計(jì)、單目視覺系統(tǒng)的 6-DoF 姿態(tài)估計(jì)以及基于慣性的導(dǎo)航估計(jì)結(jié)果,使用提出了EKF處理方案。對(duì)于這種類型的策略,傳感器可以提供冗余,并且系統(tǒng)將對(duì)可能的單傳感器故障具有魯棒性。可能需要一個(gè)決策步驟來識(shí)別來自每個(gè)傳感器的數(shù)據(jù)是否可靠,并決定是采用來自該傳感器模式的估計(jì)還是忽略它。另一種融合策略是使用輔助傳感器來提高其他基于傳感器的 SLAM 算法的性能。主傳感器可以是激光雷達(dá)或攝像頭,而輔助傳感器可以是任何其他類型的傳感器。在這個(gè)策略中,輔助傳感器用于克服主傳感器的局限性。在[工作104 ] 結(jié)合視覺信息為剛體變換提供良好的初始猜測(cè),然后使用該初始變換為 ICP 框架播種。黃等。[ 105 ] 從激光雷達(dá)數(shù)據(jù)中提取基于點(diǎn)和基于線的地標(biāo)的深度。所提出的系統(tǒng)使用此深度信息來指導(dǎo)相機(jī)跟蹤,并支持后續(xù)的點(diǎn)線束調(diào)整以進(jìn)一步提高估計(jì)精度。
以上兩種策略可以結(jié)合使用。在[ 106 ]的工作中,融合由兩個(gè)模型組成,一個(gè)處理特征融合,利用圖像中的線特征信息去除激光段中由動(dòng)態(tài)物體產(chǎn)生的任何“偽段”。另一個(gè)是改進(jìn)的 EKF SLAM 框架,它結(jié)合了從單個(gè)單目和激光 SLAM 獲得的狀態(tài)估計(jì),以減少姿態(tài)估計(jì)協(xié)方差并提高定位精度。這種改進(jìn)的 SLAM 框架即使在一個(gè)傳感器發(fā)生故障時(shí)也可以運(yùn)行,因?yàn)閭鞲衅?SLAM 過程是相互并行的。
在文獻(xiàn)中也可以找到一些更緊密融合的例子。[ 107 ]的工作結(jié)合了激光點(diǎn)云數(shù)據(jù)和圖像特征點(diǎn)數(shù)據(jù)作為約束,并使用特定的成本函數(shù)對(duì)這兩個(gè)約束進(jìn)行了圖形優(yōu)化。此外,該系統(tǒng)還添加了基于圖像特征的閉環(huán)以消除累積誤差。
慣性 SLAM 包含一個(gè)慣性測(cè)量單元 (IMU) 作為輔助傳感器。IMU 可以與 Camera 或 Lidar 融合,支持位姿(位置、速度、姿態(tài))估計(jì)。使用 IMU,可以觀察到姿態(tài),尤其是航向 [ 108 ]。IMU 測(cè)量的集成還可以提高觀察間隙期間的運(yùn)動(dòng)跟蹤性能。例如,對(duì)于視覺 SLAM,光照變化、無紋理區(qū)域或運(yùn)動(dòng)模糊將導(dǎo)致視覺軌跡丟失 [ 108 ]。對(duì)于激光雷達(dá)系統(tǒng),原始激光雷達(dá)掃描數(shù)據(jù)可能會(huì)因高速運(yùn)動(dòng)(例如快速移動(dòng)或突然搖晃)而產(chǎn)生傾斜,從而導(dǎo)致難以解釋的傳感誤差 [109 ]。[ 110的工作] 使用 IMU 傳感器來處理快速速度變化,并初始化運(yùn)動(dòng)估計(jì)以進(jìn)行掃描匹配激光雷達(dá)里程計(jì),以支持他們的 LOAM 系統(tǒng)。兩次激光雷達(dá)掃描之間的高頻 IMU 數(shù)據(jù)可用于消除激光雷達(dá)點(diǎn)云的偏移并提高其精度 [ 109 ]。
慣性傳感器的融合可以作為一個(gè)簡(jiǎn)單的助手 [ 111 , 112 ] 或更緊密的耦合 [ 108 , 113 , 114 , 115 ]。對(duì)于簡(jiǎn)單的輔助情況,IMU 主要用于提供方向信息,例如支持系統(tǒng)初始化。IMU 用作整個(gè)系統(tǒng)的先驗(yàn),IMU 測(cè)量不用于進(jìn)一步優(yōu)化。對(duì)于緊耦合情況,IMU數(shù)據(jù)與相機(jī)/激光雷達(dá)狀態(tài)融合建立測(cè)量模型,然后進(jìn)行狀態(tài)估計(jì)并反饋給慣性導(dǎo)航系統(tǒng)以提高導(dǎo)航性能[ 116]. 因此,前一種方法比后者更有效,但準(zhǔn)確性較低 [ 117 ]。對(duì)于緊密耦合的情況,卡爾曼濾波器可用于校正 IMU 狀態(tài),即使在 GNSS 中斷期間也是如此 [ 118 ]。
2.5. 基于深度學(xué)習(xí)的 SLAM
前面提到的大多數(shù)SLAM方法都是基于幾何模型的,它建立了基于幾何的平臺(tái)運(yùn)動(dòng)和環(huán)境模型。這些方法在過去十年中取得了巨大的成功。然而,他們?nèi)匀幻媾R許多具有挑戰(zhàn)性的問題。例如,視覺 SLAM (VSLAM) 在極端光照條件下受到限制。對(duì)于大規(guī)模應(yīng)用,基于模型的方法需要處理大量信息,例如特征和動(dòng)態(tài)障礙物。最近,深度學(xué)習(xí)技術(shù),例如在計(jì)算機(jī)視覺領(lǐng)域開發(fā)的數(shù)據(jù)驅(qū)動(dòng)方法,引起了更多關(guān)注。許多研究人員嘗試將深度學(xué)習(xí)方法應(yīng)用于 SLAM 問題。
由于深度學(xué)習(xí)技術(shù)在圖像分類、識(shí)別、目標(biāo)檢測(cè)和圖像分割領(lǐng)域取得了突破,因此當(dāng)前的大部分研究活動(dòng)都集中在利用基于學(xué)習(xí)的方法來解決 VSLAM 問題 [119 ]。例如,深度學(xué)習(xí)已成功應(yīng)用于視覺里程計(jì) (VO) 問題,這是 VSLAM 的重要組成部分。光流估計(jì)在一些學(xué)習(xí)的VO模型中用作輸入[ 120、121、122、123、124 ] 。學(xué)習(xí)方法的應(yīng)用可以以端到端的方式應(yīng)用,而無需在傳統(tǒng)的 VO 管道中采用任何模塊[ 125、126 ]]. 王等。[ 125 ] 通過將 CNN 與 RNN 相結(jié)合,引入了一種具有深度遞歸卷積神經(jīng)網(wǎng)絡(luò) (RCNN) 的端到端 VO 算法。使用這種算法,相機(jī)的姿態(tài)直接從原始 RGB 圖像中估計(jì)出來,既不需要先驗(yàn)知識(shí)也不需要參數(shù)來恢復(fù)絕對(duì)比例 [ 125 ]。李等。[ 127 ] 提出了一種基于無監(jiān)督深度學(xué)習(xí)的 VO 系統(tǒng)(UnDeepVO),該系統(tǒng)使用立體圖像對(duì)進(jìn)行訓(xùn)練,然后使用單目圖像執(zhí)行姿態(tài)估計(jì)和密集深度圖估計(jì)。與 Wang 等人提出的不同。[ 125 ],UnDeepVO 不需要地面實(shí)況,因?yàn)樗詿o人監(jiān)督的方式運(yùn)行。
基于學(xué)習(xí)的方法可以與 VSLAM 系統(tǒng)相結(jié)合,以替換或添加傳統(tǒng) SLAM 的單個(gè)或某些模塊,例如圖像深度估計(jì) [128, 129, 130] ,姿態(tài)估計(jì)[ 131 , 132 , 133 ] ,以及閉環(huán)[ 134、135、136、137 ]等,對(duì)傳統(tǒng)方法進(jìn)行改進(jìn)。李等。[ 138] 提出了一種完全無監(jiān)督的基于深度學(xué)習(xí)的 VSLAM,它包含幾個(gè)組件,包括 Mapping-net、Tracking-net、Loop-net 和圖形優(yōu)化單元。這種 DeepSLAM 方法可以實(shí)現(xiàn)準(zhǔn)確的姿態(tài)估計(jì),并且在一些具有挑戰(zhàn)性的場(chǎng)景中具有魯棒性,將重要的幾何模型和約束結(jié)合到網(wǎng)絡(luò)架構(gòu)和損失函數(shù)中。
環(huán)境的語義感知和語義分割是當(dāng)前計(jì)算機(jī)視覺領(lǐng)域的研究課題。它們可以提供對(duì)環(huán)境的高層次理解,對(duì)于自主應(yīng)用程序極為重要。深度學(xué)習(xí)的快速發(fā)展可以協(xié)助將語義信息引入 VSLAM [ 139 ],用于語義分割 [ 140、141、142 ] 、定位和建圖 [ 143、144、145、146、147 ],以及動(dòng)態(tài)對(duì)象移除[ 148 , 149 , 150 , 151]. 一些基于深度學(xué)習(xí)的VSLAM的詳細(xì)評(píng)論可以在[ 92、139、152、153、154 ]中找到。
與慣性傳感器的融合也可以受益于深度學(xué)習(xí)技術(shù),尤其是 RNN,它在整合時(shí)間信息和幫助建立相鄰幀之間的一致性方面具有優(yōu)勢(shì) [139 ]。視覺和慣性數(shù)據(jù)與 RNN 或長短期記憶 (LSTM) 的集成,RNN 的一種變體,允許 RNN 學(xué)習(xí)長期趨勢(shì) [155],已被證明比傳統(tǒng)融合更有效和方便 [ 156 ] , 157 , 158 ]。根據(jù) Clark 等人的說法。[ 157],數(shù)據(jù)驅(qū)動(dòng)的方法消除了相機(jī)和 IMU 手動(dòng)同步的需要,以及相機(jī)和 IMU 之間手動(dòng)校準(zhǔn)的需要。它優(yōu)于傳統(tǒng)的融合方法,因?yàn)樗鼘?duì)校準(zhǔn)誤差具有魯棒性并且可以減輕傳感器漂移。然而,為了解決漂移問題,仍然需要研究將基于學(xué)習(xí)的視覺慣性里程計(jì)系統(tǒng)進(jìn)一步擴(kuò)展到更大的具有閉環(huán)檢測(cè)和全局重定位的類 SLAM 系統(tǒng)。
與基于視覺的 SLAM 相比,激光掃描儀或基于激光雷達(dá)的 SLAM 的深度學(xué)習(xí)技術(shù)的應(yīng)用仍處于早期階段,可以被認(rèn)為是一個(gè)新的挑戰(zhàn) [159 ]。維拉斯等人。[ 160 ]通過使用 IMU 傳感器支持旋轉(zhuǎn)參數(shù)估計(jì),將 CNN 用于激光雷達(dá)里程計(jì)估計(jì)。結(jié)果與 LOAM 等最先進(jìn)的方法具有競(jìng)爭(zhēng)力。李等。[ 161 ]介紹了一種端到端的激光雷達(dá)里程計(jì)LO-Net,它具有高效率和高精度,并且可以處理動(dòng)態(tài)物體。然而,這種方法是用地面實(shí)況數(shù)據(jù)訓(xùn)練的,這限制了它在大規(guī)模戶外場(chǎng)景中的應(yīng)用。李等。[ 162] 設(shè)計(jì)了一個(gè)視覺-激光雷達(dá)里程計(jì)框架,它是自我監(jiān)督的,不使用任何地面實(shí)況標(biāo)簽。結(jié)果表明,這種 VLO 方法優(yōu)于當(dāng)前其他自監(jiān)督視覺或激光雷達(dá)里程計(jì)方法,并且比完全監(jiān)督的 VO 表現(xiàn)更好。數(shù)據(jù)驅(qū)動(dòng)的方法還使激光雷達(dá)數(shù)據(jù)的語義分割更加準(zhǔn)確和快速,使其適用于支持自動(dòng)駕駛汽車 [ 163、164、165 ] 。LMNet 可以將運(yùn)動(dòng)物體與靜態(tài)物體區(qū)分開來[ 166] 基于 3D 激光雷達(dá)掃描的 CNN。在具有挑戰(zhàn)性的動(dòng)態(tài)環(huán)境中自動(dòng)駕駛的一些具有成本效益的 3D 激光雷達(dá)應(yīng)用的一個(gè)限制是其相對(duì)稀疏的點(diǎn)云。為了克服這個(gè)缺點(diǎn),Yue 等人使用了高分辨率相機(jī)圖像。[ 167] 來豐富原始 3D 點(diǎn)云。ERFNet 用于借助稀疏激光雷達(dá)數(shù)據(jù)對(duì)圖像進(jìn)行分割。同時(shí),采用稀疏不變CNN(SCNN)來預(yù)測(cè)密集點(diǎn)云。然后,可以使用多層卷積神經(jīng)網(wǎng)絡(luò) (MCNN) 組合這兩個(gè)輸出來細(xì)化豐富的點(diǎn)云。最后,可以使用這個(gè)豐富的點(diǎn)云執(zhí)行激光雷達(dá) SLAM。使用這種激光雷達(dá)數(shù)據(jù)豐富神經(jīng)網(wǎng)絡(luò)方法可以實(shí)現(xiàn)更好的目標(biāo)分割。然而,由于訓(xùn)練數(shù)據(jù)集較小,與原始稀疏點(diǎn)云相比,該方法在豐富點(diǎn)云的 SLAM 精度上沒有提高。可能需要對(duì)動(dòng)態(tài)對(duì)象進(jìn)行更多培訓(xùn)和進(jìn)一步調(diào)查,以滿足自動(dòng)駕駛應(yīng)用要求 [ 167 ]。
復(fù)雜的深度學(xué)習(xí)架構(gòu)的產(chǎn)生有助于實(shí)現(xiàn)更準(zhǔn)確、穩(wěn)健、自適應(yīng)和高效的計(jì)算機(jī)視覺解決方案,證實(shí)了它們?cè)?SLAM 問題中應(yīng)用的巨大潛力。大規(guī)模數(shù)據(jù)集的可用性仍然是推動(dòng)這些應(yīng)用程序發(fā)展的關(guān)鍵。此外,由于不需要地面實(shí)況,無監(jiān)督學(xué)習(xí)更有希望用于自動(dòng)駕駛中的 SLAM 應(yīng)用。與傳統(tǒng)的SLAM算法相比,數(shù)據(jù)驅(qū)動(dòng)的SLAM仍處于發(fā)展階段,尤其是激光雷達(dá)SLAM。此外,結(jié)合多種傳感模式可以克服單個(gè)傳感器的缺點(diǎn),為此基于學(xué)習(xí)方法的集成系統(tǒng)仍需要進(jìn)一步研究。
3. SLAM在自動(dòng)駕駛中的應(yīng)用
根據(jù) SLAM 技術(shù)的不同特性,自動(dòng)駕駛可能有不同的應(yīng)用。應(yīng)用程序的一種分類是它們是離線的還是在線的。滿足高性能要求的地圖通常是離線生成的,例如高清(HD)地圖[ 10 ]。對(duì)于這種3D點(diǎn)云地圖,離線地圖生成過程保證了地圖的準(zhǔn)確性和可靠性。可以預(yù)先生成此類地圖以支持自動(dòng)駕駛車輛的實(shí)時(shí)操作。
3.1. 高清地圖生成與更新
如前所述,SLAM 可用于生成用于自動(dòng)駕駛的數(shù)字地圖,例如高清地圖 [ 10]. 由于要求嚴(yán)格,因此使用了高質(zhì)量的傳感器。激光雷達(dá)是自動(dòng)駕駛汽車的核心傳感器之一,因?yàn)樗梢陨筛呙芏鹊?3D 點(diǎn)云。高端GNSS和INS技術(shù)也被用來提供準(zhǔn)確的位置信息。相機(jī)可以提供類似于人眼檢測(cè)到的信息的信息。傳感器數(shù)據(jù)的融合和道路信息的分析以生成高清地圖需要相當(dāng)大的計(jì)算能力,這在當(dāng)前的車載系統(tǒng)中是不可行的。因此,高清地圖是離線構(gòu)建的,使用基于優(yōu)化的 SLAM 等技術(shù)。離線地圖創(chuàng)建可以通過多次駕駛道路網(wǎng)絡(luò)來收集信息,然后將所有收集到的感知傳感器信息和位置信息一起處理,以提高最終地圖的準(zhǔn)確性。高清地圖的示例顯示在圖 4 [ 11 ]。
圖 4. 來自高清地圖 ( https://here.com/ ) [ 11 ] 的圖像。
道路環(huán)境和道路規(guī)則可能會(huì)發(fā)生變化,例如,道路施工可能會(huì)降低限速,建筑開發(fā)可能會(huì)改變道路基礎(chǔ)設(shè)施等。因此高精地圖需要經(jīng)常更新。此類更新可以利用從任何自動(dòng)駕駛汽車收集的在線數(shù)據(jù)。例如,數(shù)據(jù)被傳輸?shù)綀?zhí)行更新計(jì)算的中央(云)計(jì)算機(jī)。其他汽車可以接收此類基于云的更新,并及時(shí)調(diào)整駕駛計(jì)劃。喬等人。[ 168 ] 提出了一種 SLAM 變化更新(SLAMCU)算法,利用 Rao-Blackwellized PF 方法進(jìn)行在線車輛位置和(新)地圖狀態(tài)估計(jì)。在 [ 169],當(dāng)車輛暫時(shí)停止或在停車場(chǎng)時(shí),可以使用Graph SLAM生成一個(gè)新的高清地圖特征層。然后可以將來自一輛車的新特征層上傳到地圖云,并與來自其他車輛的特征層集成到地圖云中的新特征層,從而實(shí)現(xiàn)更精確和穩(wěn)健的車輛定位。在張等人的工作中。[ 170 ],結(jié)合實(shí)時(shí)語義分割和視覺SLAM生成道路環(huán)境的語義點(diǎn)云數(shù)據(jù),然后與預(yù)先構(gòu)建的高清地圖進(jìn)行匹配,以確認(rèn)地圖元素沒有發(fā)生變化,并在發(fā)生變化時(shí)生成新的元素。出現(xiàn),從而促進(jìn)高清地圖的眾包更新。
3.2. 小型本地地圖生成
SLAM 也可以用于小的局部區(qū)域。一個(gè)例子是在停車場(chǎng)內(nèi)。停車場(chǎng)的行駛速度較低,因此視覺技術(shù)將比其他高速行駛場(chǎng)景更穩(wěn)健。停車區(qū)域可能是未知的(公共停車場(chǎng)或車庫),或已知的(家庭區(qū)域)——這兩種情況都可以從 SLAM 中獲益。由于 SLAM 可以在沒有 GNSS 信號(hào)的情況下使用,因此適用于室內(nèi)或地下停車場(chǎng)的車輛,僅使用感知傳感器和里程計(jì)測(cè)量(速度、轉(zhuǎn)角)或 IMU 測(cè)量。對(duì)于未知的公共停車場(chǎng),可以同時(shí)估計(jì)汽車的位置和障礙物,如柱子、側(cè)墻等,指導(dǎo)停車系統(tǒng)。對(duì)于家庭區(qū)域停車,可以將預(yù)先生成的地圖和頻繁停車軌跡存儲(chǔ)在自動(dòng)車輛系統(tǒng)中。每次汽車回家時(shí),可以通過將檢測(cè)到的特征與地圖進(jìn)行匹配,使用存儲(chǔ)的地圖進(jìn)行重新定位。頻繁軌跡可用于規(guī)劃和控制步驟。
[ 171 ]中提出了一種利用多級(jí)表面 (MLS) 地圖定位車輛,并計(jì)算和規(guī)劃室內(nèi)停車場(chǎng)內(nèi)車輛路徑的方法。在這項(xiàng)研究中,基于圖形的 SLAM 用于建圖,然后使用 MLS 地圖規(guī)劃從起點(diǎn)到目的地的全局路徑,并通過激光測(cè)距穩(wěn)健地定位車輛。在 [ 172 ]的工作中,網(wǎng)格地圖和 EKF SLAM 算法與 W 波段雷達(dá)一起用于自主倒車停車。在這項(xiàng)工作中,提出了一種有效的 EKF SLAM 算法以實(shí)現(xiàn)實(shí)時(shí)處理。在 [ 173],作者提出了一種環(huán)視監(jiān)視器(AVM)/激光雷達(dá)傳感器融合方法來識(shí)別停車道并提供快速閉環(huán)性能。上述研究表明,即使沒有 GNSS,基于濾波器的 SLAM 和基于優(yōu)化的 SLAM 都可以用于支持高效和準(zhǔn)確的車輛停車輔助(局部區(qū)域建圖和定位)。在秦等人的工作中。[ 174],執(zhí)行位姿圖優(yōu)化以獲得優(yōu)化的軌跡和停車場(chǎng)的全局地圖,具有諸如引導(dǎo)標(biāo)志、停車線和減速帶等語義特征。這些特征比傳統(tǒng)的幾何特征更(長期)穩(wěn)定和穩(wěn)健,尤其是在地下停車場(chǎng)環(huán)境中。然后使用 EKF 完成自動(dòng)駕駛的定位系統(tǒng)。
3.3. 在現(xiàn)有地圖中定位
在基于地圖的定位中,使用迭代最近點(diǎn) (ICP)、正態(tài)分布變換 (NDT) 等方法將“實(shí)時(shí)”數(shù)據(jù)與地圖信息進(jìn)行匹配 [10 , 175 ]。這些算法可以與 SLAM 問題聯(lián)系起來,因?yàn)?SLAM 使用類似的方法執(zhí)行閉環(huán)和重新定位。對(duì)于 SLAM 問題,識(shí)別先前建圖的對(duì)象或特征并在環(huán)境中重新定位車輛的能力對(duì)于校正地圖 [ 13 ]至關(guān)重要。因此,重用預(yù)先生成的地圖來定位車輛可以被認(rèn)為是 SLAM 算法的擴(kuò)展。換句話說,預(yù)先生成和存儲(chǔ)的地圖可以被視為一種支持定位的“傳感器”。
然而,將實(shí)時(shí)數(shù)據(jù)與預(yù)先準(zhǔn)備好的大規(guī)模地圖相匹配需要大量的計(jì)算資源。因此,已經(jīng)提出了一些方法來提高計(jì)算效率。一種方法是先用 GNSS 或 GNSS/INS 估計(jì)的位置從地圖中縮小可能的匹配區(qū)域,然后將檢測(cè)到的特征與地圖進(jìn)行詳細(xì)匹配 [176 ]。
由于目前激光雷達(dá)系統(tǒng)在商用車上的安裝有限(傳感器價(jià)格高、功耗大),在預(yù)先生成的高清地圖中使用低成本傳感器(例如視覺傳感器)定位車輛具有相當(dāng)大的實(shí)用性興趣。例如,[ 177 ] 中的工作使用視覺數(shù)據(jù)在密集的激光雷達(dá)生成的地圖中定位了車輛,并證明了與傳統(tǒng)激光雷達(dá)定位相似的數(shù)量級(jí)錯(cuò)誤率,但使用便宜幾個(gè)數(shù)量級(jí)的傳感器技術(shù)。施賴伯等人。[ 178] 建議首先使用高精度 GNSS 單元、Velodyne 激光掃描儀和相機(jī)生成帶有道路標(biāo)記和路緣信息的高精度地圖。然后在定位過程中,使用立體攝像頭系統(tǒng)檢測(cè)道路信息,并將其與預(yù)先生成的地圖進(jìn)行匹配,實(shí)現(xiàn)車道級(jí)實(shí)時(shí)定位。鄭等人。[ 179 ]利用從相機(jī)圖像中獲得的道路標(biāo)記進(jìn)行全局定位。生成了包含道路信息(例如 3D 道路標(biāo)記點(diǎn))的子地圖,并用于識(shí)別重訪地點(diǎn)并支持準(zhǔn)確的環(huán)路檢測(cè)。然后使用基于姿勢(shì)圖的方法來消除漂移。秦等。[ 146] 提出語義定位系統(tǒng),為低成本汽車提供輕量級(jí)定位解決方案。在這項(xiàng)工作中,通過結(jié)合基于 CNN 的語義分割結(jié)果和位姿圖優(yōu)化后的優(yōu)化軌跡生成局部語義圖。然后在云服務(wù)器中生成(或更新)壓縮的全球地圖,以基于 ICP 方法和 EKF 框架進(jìn)一步對(duì)最終用戶進(jìn)行定位。語義地圖的平均大小為 36 kb/km。這種基于攝像頭的定位框架對(duì)于自動(dòng)駕駛來說是可靠和實(shí)用的。
除了上述應(yīng)用,道路環(huán)境中的移動(dòng)物體也會(huì)導(dǎo)致自動(dòng)駕駛的感知、定位和建圖漂移。SLAM 可用于解決 DATMO(移動(dòng)物體的檢測(cè)和跟蹤)[ 15 ] 的問題,因?yàn)?SLAM 的假設(shè)之一是檢測(cè)到的特征是靜止的。由于環(huán)境的靜態(tài)部分由 SLAM 定位和建圖,動(dòng)態(tài)部分可以同時(shí)檢測(cè)和跟蹤。一些方法已經(jīng)處理了動(dòng)態(tài)障礙[ 180、181、182 ]。
4. SLAM應(yīng)用于自動(dòng)駕駛的挑戰(zhàn)及建議解決方案
4.1. 確保高精度和高效率
自動(dòng)駕駛車輛的定位和地圖繪制需要對(duì)環(huán)境中的任何變化都準(zhǔn)確且穩(wěn)健,并高效執(zhí)行。隨著傳感器技術(shù)的快速發(fā)展,不同傳感器的組合可以彌補(bǔ)特定傳感器的局限性。示例包括 GNSS/INS + 激光雷達(dá)/相機(jī) SLAM、雷達(dá) SLAM 等。有大量與低成本和/或小型化激光雷達(dá)傳感器相關(guān)的研究和開發(fā)。新的激光雷達(dá)傳感器概念有望顯著降低激光雷達(dá)系統(tǒng)的成本,并有可能在未來的自動(dòng)駕駛汽車中實(shí)時(shí)實(shí)施。例如,RoboSense 推出了一個(gè)新的$200 激光雷達(dá)傳感器結(jié)合 MEMS 傳感器和基于 AI 的深度學(xué)習(xí)算法以支持高性能自動(dòng)駕駛應(yīng)用 [ 183 ]。
選擇 SLAM 方法應(yīng)考慮具有不同需求級(jí)別的不同應(yīng)用場(chǎng)景。基于優(yōu)化的 SLAM 可以提供更準(zhǔn)確和穩(wěn)健的估計(jì),但更適合離線估計(jì)。EKF SLAM 存在狀態(tài)變量數(shù)量呈二次方增長的問題,這限制了其在大規(guī)模環(huán)境中的在線應(yīng)用。盡管高分辨率地圖的生成可以是離線的、實(shí)時(shí)的或近實(shí)時(shí)的,但解決方案對(duì)于地圖更新和基于地圖的本地化應(yīng)用程序來說是必不可少的。
道路環(huán)境的任何變化都應(yīng)在地圖上快速更新并傳輸給其他道路使用者。新興的 5G 無線技術(shù)可以使車對(duì)車 (V2V)、車對(duì)基礎(chǔ)設(shè)施 (V2I) 和車對(duì)云之間的通信更加可靠,吞吐量更高 [14 ]。
4.2. 代表環(huán)境
有不同類型的地圖可用于表示道路環(huán)境。機(jī)器人領(lǐng)域中用于 SLAM 應(yīng)用的三種主要地圖類型是占用網(wǎng)格地圖、基于特征的地圖和拓?fù)涞貓D [ 184 ]。它們也適用于道路環(huán)境。對(duì)于自動(dòng)駕駛應(yīng)用,它們中的每一個(gè)都有其自身的優(yōu)勢(shì)和局限性。網(wǎng)格地圖將環(huán)境劃分為許多固定大小的單元格,每個(gè)單元格包含自己獨(dú)特的屬性,例如網(wǎng)格是否被占用、空閑或未知 [ 185、186 ]。障礙物占用信息可以直接提供給規(guī)劃算法。這種地圖可以很容易地合并,并且可以靈活地合并來自多種類型傳感器的數(shù)據(jù) [ 184]. Mentasti 和 Matteucci [ 185 ] 提出了一種占用網(wǎng)格創(chuàng)建方法,該方法利用來自自動(dòng)駕駛車輛上所有可用傳感器的數(shù)據(jù),包括激光雷達(dá)、相機(jī)、激光和雷達(dá)。網(wǎng)格圖還顯示了檢測(cè)移動(dòng)物體的潛力 [ 187 ]。穆茨等人。[ 188] 比較不同網(wǎng)格地圖的建圖和定位性能,包括占用率、反射率、顏色和語義網(wǎng)格地圖,用于自動(dòng)駕駛汽車在不同駕駛環(huán)境中的應(yīng)用,包括在具有挑戰(zhàn)性的條件下。GraphSLAM 用于建圖,而定位基于粒子濾波解決方案。根據(jù)他們的結(jié)果,占用顯示了更準(zhǔn)確的定位結(jié)果,其次是反射率網(wǎng)格圖。語義網(wǎng)格地圖在大多數(shù)情況下保持位置跟蹤沒有損失,但是比前兩種地圖方法有更大的錯(cuò)誤。彩色網(wǎng)格圖在定位中使用最不一致和不準(zhǔn)確,這可能是由于光照條件的影響。189 ]。因此 Li [ 186 ] 建議將此技術(shù)應(yīng)用于具有受控大小的實(shí)時(shí)局部建圖而不是全局建圖。
基于特征的地圖是一種流行的自動(dòng)駕駛地圖類型。它用一組從傳感器數(shù)據(jù)中提取的特征來表示地圖。對(duì)于室外道路環(huán)境,典型的特征是車道、路緣石、道路標(biāo)記和標(biāo)志、建筑物、樹木等。對(duì)于室內(nèi)區(qū)域,尤其是停車場(chǎng),特征主要是停車道、側(cè)墻等。這些特征可以是由點(diǎn)、線、面表示,標(biāo)有坐標(biāo)信息。點(diǎn)特征將環(huán)境表示為密集的點(diǎn)云。使用激光雷達(dá)和/或視覺傳感器生成的高密度點(diǎn)云地圖可以提供車輛周圍區(qū)域的豐富特征和 3D 結(jié)構(gòu)信息。然而,如此龐大的數(shù)據(jù)傳輸、更新和處理對(duì)于復(fù)雜的道路環(huán)境來說是一個(gè)沉重的負(fù)擔(dān)。較稀疏的線面特征適用于結(jié)構(gòu)化環(huán)境,如室內(nèi)環(huán)境、市區(qū)或高速公路,標(biāo)記清晰。這些特征比點(diǎn)特征更復(fù)雜,內(nèi)存需求更低[186 ],并且不易受噪音影響[ 189 ]。我等人。[ 173 ]提出了一種基于停車線的 SLAM 方法,該方法提取和分析停車線特征,以實(shí)現(xiàn)停車區(qū)的快速閉環(huán)和準(zhǔn)確定位。Javanmardi 等人。[ 190 ] 生成了一張城市道路地圖,其中包含 2D 線和 3D 平面,以表示道路沿線的建筑物和地面。然而,對(duì)于自動(dòng)駕駛來說,應(yīng)用環(huán)境是多變的。特定的基于地標(biāo)的算法可能不適用于其他駕駛場(chǎng)景。此外,在一些農(nóng)村地區(qū),道路可能未鋪砌,也沒有道路車道標(biāo)記。因此,由于缺乏道路標(biāo)記和不規(guī)則的道路曲線幾何形狀,相關(guān)的基于特征的地圖方法可能不可行 [191].
拓?fù)鋱D表示具有一系列節(jié)點(diǎn)和邊的環(huán)境。節(jié)點(diǎn)表示重要的對(duì)象,如拐角、交叉點(diǎn)和特征點(diǎn);而邊表示它們之間的拓?fù)潢P(guān)系 [ 192 , 193 ]。一種典型的拓?fù)鋱D是 OpenStreetMAP (OSM) [ 194 ],它包含要素的坐標(biāo)以及道路方向、車道數(shù)等道路屬性。這種地圖顯著降低了存儲(chǔ)和計(jì)算要求。然而,它丟失了一些關(guān)于實(shí)際環(huán)境的性質(zhì)和結(jié)構(gòu)的有用信息 [ 184 ]。因此,一些方法將拓?fù)鋱D與其他類型的圖結(jié)合起來。Bernuy 和 Ruiz-del-Solar [ 195] 提出使用基于語義信息的拓?fù)鋱D為自動(dòng)駕駛汽車和 ADAS 系統(tǒng)的大規(guī)模室外場(chǎng)景提供穩(wěn)健高效的建圖和定位解決方案。根據(jù) Bernuy 和 Ruiz-del-Solar [ 195 ] 的研究,基于圖的拓?fù)湔Z義建圖方法適用于高速公路、鄉(xiāng)村道路和城市地區(qū)的大規(guī)模駕駛?cè)蝿?wù),與度量地圖相比計(jì)算量更少。本德爾等。[ 196 ] 介紹了一個(gè)非常詳細(xì)的地圖,Lanelets,它結(jié)合了幾何和拓?fù)浔硎荆ㄓ嘘P(guān)交通法規(guī)和速度限制的信息。
語義地圖在自主領(lǐng)域變得越來越重要,因?yàn)樗Z義信息,可以讓機(jī)器人或車輛更好地理解環(huán)境,并完成更高級(jí)別的任務(wù),例如人機(jī)交互。對(duì)于戶外應(yīng)用,標(biāo)記對(duì)象可以是統(tǒng)計(jì)背景(例如,“建筑物”、“樹”、“交通標(biāo)志”)或動(dòng)態(tài)實(shí)體(例如,“車輛”、“行人”)。因此,這種地圖可以促進(jìn)自動(dòng)駕駛車輛的復(fù)雜任務(wù),例如規(guī)劃和導(dǎo)航 [ 195、197 ]。將語義概念與幾何實(shí)體相關(guān)聯(lián)已成為一個(gè)熱門的研究課題,并且已經(jīng)研究了結(jié)合幾何和語義信息的語義 SLAM 方法 [ 139 , 143, 149 ]。語義 SLAM 方法有助于使定位和建圖更加穩(wěn)健 [ 174 ],支持在重訪區(qū)域進(jìn)行重新定位 [ 143 ],非常重要的是,有助于跟蹤在動(dòng)態(tài)環(huán)境中檢測(cè)到的移動(dòng)物體[ 149、151、198 ] 。語義地圖生成和利用面臨的一個(gè)關(guān)鍵問題是其中的一些模塊,例如語義分割,對(duì)計(jì)算要求很高,這使得它們不適合實(shí)時(shí)應(yīng)用[199],特別是對(duì)于大規(guī)模的戶外場(chǎng)景。因此,一些研究試圖解決這個(gè)問題。羅斯等人。[ 199] 提出了一種離線在線策略,可以在不犧牲準(zhǔn)確性的情況下離線生成密集的 3D 語義地圖。之后,可以通過將當(dāng)前視圖與 3D 地圖進(jìn)行匹配來進(jìn)行實(shí)時(shí)自定位,并相應(yīng)地檢索相關(guān)的幾何和語義。同時(shí),可以在線檢測(cè)新的動(dòng)態(tài)物體,支持瞬時(shí)運(yùn)動(dòng)規(guī)劃。隨著深度學(xué)習(xí)的出現(xiàn),語義分割和語義 SLAM 的效率和可靠性得到了極大的提高 [ 147 , 200 , 201 , 202 , 203]. 然而,如前所述,在將基于深度學(xué)習(xí)的語義 SLAM 應(yīng)用于自動(dòng)駕駛時(shí),仍然存在一些挑戰(zhàn),例如需要大量的訓(xùn)練數(shù)據(jù),或者缺乏需要無監(jiān)督學(xué)習(xí)方法的 ground truth。
不同的地圖表示對(duì)于支持在具有挑戰(zhàn)性和復(fù)雜的道路環(huán)境中運(yùn)行的高度自動(dòng)化車輛至關(guān)重要。因此,越來越多地采用包含不同數(shù)據(jù)層的詳細(xì)數(shù)字地圖,例如高清地圖。除了最基本的 3D 點(diǎn)云地圖圖層外,高清地圖還可能包含具有道路拓?fù)洹缀涡螤睢⒄加寐省④嚨捞卣鳌⒌缆吩O(shè)施、道路規(guī)則、實(shí)時(shí)知識(shí)等信息的圖層。在不損失準(zhǔn)確性的情況下存儲(chǔ)、更新和利用如此密集的數(shù)據(jù)是一項(xiàng)挑戰(zhàn)。一些研究人員提出了“道路 DNA”的概念來表示道路環(huán)境并處理大數(shù)據(jù)問題 [ 12 , 204]. Road DNA 在不丟失細(xì)節(jié)的情況下將 3D 點(diǎn)云道路模式轉(zhuǎn)換為壓縮的 2D 道路視圖 [ 12 ],目的是降低處理要求。
4.3. 估計(jì)偏差問題
SLAM估計(jì)漂移可能是由累積線性化誤差、動(dòng)態(tài)障礙物的存在、噪聲傳感器數(shù)據(jù)、錯(cuò)誤的數(shù)據(jù)關(guān)聯(lián)等引起的。
在大多數(shù) SLAM 算法中,非線性模型用于表示車輛運(yùn)動(dòng)模式和環(huán)境。由于線性化誤差的累積,EKF SLAM 存在發(fā)散問題。當(dāng)使用遠(yuǎn)離真實(shí)值的狀態(tài)變量值執(zhí)行線性化時(shí),可能會(huì)出現(xiàn)偏差。對(duì)于基于優(yōu)化的 SLAM,變量的初始猜測(cè)不佳將導(dǎo)致收斂性能不佳。旋轉(zhuǎn)可能是非線性的原因,對(duì)估計(jì)的發(fā)散有很大影響[ 205,206 ],因此累積的車輛方向誤差將導(dǎo)致 SLAM 問題的不一致性。線性化挑戰(zhàn)的一種解決方案是 [ 205]中提出的線性 SLAM 算法],修改相對(duì)狀態(tài)向量,進(jìn)行“map joining”。子圖連接涉及解決線性最小二乘問題和執(zhí)行非線性坐標(biāo)變換,不需要初始猜測(cè)或迭代。在 [ 207 ]的工作中,提出了一種以機(jī)器人為中心的局部地圖排序方法,該方法可以限制每個(gè)局部地圖內(nèi)的位置不確定性,并通過傳感器不確定性水平約束提高線性化精度。已經(jīng)提出了經(jīng)典 EKF-SLAM 的許多變體來克服濾波器的發(fā)散。[ 208 ]的研究表明,Unscented SLAM可以提高大規(guī)模戶外應(yīng)用的在線一致性。黃等。[ 209] 為 EKF-SLAM 提出了兩種替代方案,Observability Constrained EKF 和 First-Estimates Jacobian EKF,兩者在準(zhǔn)確性和一致性方面都明顯優(yōu)于 EKF。[ 210 ]中引入了線性時(shí)變(LTV)卡爾曼濾波,它通過創(chuàng)建虛擬測(cè)量來避免線性化誤差。一些主要基于 PF 的非參數(shù)方法,如 fastSLAM [ 28]、Unscented fastSLAM [211、212、213、214 ],表現(xiàn)出比EKF-SLAM 更好的性能。
對(duì)于基于非線性優(yōu)化的 SLAM 方法,計(jì)算一個(gè)好的初始猜測(cè)(解決初始化問題)將導(dǎo)致更快的收斂并降低收斂到局部最小值的風(fēng)險(xiǎn)。奧爾森等人。[ 215 ] 提出了一種使用隨機(jī)梯度下降 (SGD) 變體優(yōu)化位姿圖的快速迭代算法,該算法對(duì)局部最小值具有魯棒性,即使初始猜測(cè)不佳也能快速收斂。然后在 [ 50],提出了 Olson 算法的擴(kuò)展,該算法對(duì)圖中的節(jié)點(diǎn)使用基于樹的參數(shù)化。該算法被證明比 Olson 的算法更有效,并且對(duì)初始配置更穩(wěn)健。二維位姿圖的近似解,稱為位姿圖優(yōu)化的線性近似 (LAGO),可用作精確解或用于引導(dǎo)非線性技術(shù)[ 216、217 ]]. 該方法首先解決線性估計(jì)問題以獲得次優(yōu)方向估計(jì),然后用它來估計(jì)全局參考系中的相對(duì)位置測(cè)量。最后,通過求解另一個(gè)線性估計(jì)問題得到位姿解。然后可以將此解決方案視為高斯-牛頓迭代的初始猜測(cè)。這種方法可以提供一個(gè)很好的初始猜測(cè),但是,它僅限于 2D 位姿圖,并且對(duì)噪聲測(cè)量敏感。在[ 218]中提出了一種具有更復(fù)雜初始化的算法],它使用 M 估計(jì)器,特別是 Cauchy 函數(shù),作為引導(dǎo)技術(shù)。類似于使用 M 估計(jì)器使估計(jì)對(duì)異常值具有魯棒性的方法,M 估計(jì)器被證明對(duì)錯(cuò)誤的初始猜測(cè)也具有魯棒性。與 LAGO 和 TORO 相比,這種方法可以應(yīng)用于 2D 和 3D 的不同 SLAM 變體(姿勢(shì)圖和基于特征的)[218 ]。卡隆等人。[ 219 ]調(diào)查了不同的 3D 旋轉(zhuǎn)估計(jì)技術(shù),并證明了良好的旋轉(zhuǎn)估計(jì)對(duì)引導(dǎo)迭代位姿圖求解器的重要性。最近的研究提出了一種稱為多祖先空間近似樹 (MASAT) 的啟發(fā)式方法,它具有低復(fù)雜性和計(jì)算效率,無需初步優(yōu)化步驟 [220 ]]. 此方法仍然適用于位姿圖。其他研究試圖通過引入慣性測(cè)量來支持初始化 [ 221、222 ] 或進(jìn)行參數(shù)校準(zhǔn) [ 223、224、225 ]來獲得良好的初始猜測(cè)。
行人、自行車、其他車輛等動(dòng)態(tài)物體可能會(huì)導(dǎo)致估計(jì)漂移,因?yàn)橄到y(tǒng)可能會(huì)將它們錯(cuò)誤地識(shí)別為靜態(tài)道路實(shí)體。有一些方法可以避免這種情況。[ 226 ]中已經(jīng)提出了使用概率紅外強(qiáng)度值的概率圖。在這項(xiàng)研究中,GNSS/INS 和 64 光束激光雷達(dá)傳感器相結(jié)合,以在動(dòng)態(tài)環(huán)境中實(shí)現(xiàn) 9 cm 的穩(wěn)健位置 RMS 誤差。然而,該系統(tǒng)具有高成本和高計(jì)算負(fù)擔(dān)。3D對(duì)象跟蹤器[ 227 ]可用于在視覺SLAM方法中跟蹤移動(dòng)對(duì)象。[ 228]中提出的另一種算法] 使用 Canny 的邊緣檢測(cè)器在樹干的垂直方向上找到優(yōu)勢(shì)邊緣,并選擇這些樹干作為典型的顯著特征。越來越多地研究深度學(xué)習(xí)方法來處理上述動(dòng)態(tài)環(huán)境[ 148、149、150、151、166、198 ] 。
漂移的另一個(gè)來源是傳感器觀測(cè)值中的異常值。每個(gè)傳感器都有自己的誤差源。例如,在相機(jī)的情況下,由于高速和光線條件差而導(dǎo)致的模糊圖像可能導(dǎo)致地標(biāo)的錯(cuò)誤識(shí)別。激光雷達(dá)傳感器對(duì)天氣條件(如降雨)和道路環(huán)境的大變化非常敏感。GNSS 可能會(huì)受到信號(hào)阻塞。FDI(故障檢測(cè)和隔離系統(tǒng))技術(shù)可用于檢測(cè)測(cè)量異常值并拒絕這些異常值對(duì)定位和定位的影響 [ 229 ]。
上述 SLAM 誤差源也可能導(dǎo)致不正確的數(shù)據(jù)關(guān)聯(lián),這是將測(cè)量值關(guān)聯(lián)到特定地標(biāo)的重要過程。錯(cuò)誤的數(shù)據(jù)關(guān)聯(lián)不僅可能是由于傳感器數(shù)據(jù)的噪聲、不一致性、動(dòng)態(tài)物體的錯(cuò)誤檢測(cè)等,還可能是由于某些特定的道路環(huán)境。例如,高速公路環(huán)境有時(shí)在視覺上是重復(fù)的并且包含許多相似的特征,這使得很難識(shí)別以前探索過的區(qū)域。
一些研究人員通過使用 RANSAC [ 230 ]直接在 SLAM 的前端步驟避免了錯(cuò)誤數(shù)據(jù)關(guān)聯(lián)的挑戰(zhàn),RANSAC通常用于視覺 SLAM 以拒絕異常值。在 [ 231 ] 中,作者提出了一個(gè)中間層,稱為 Graph-Tinker (GTK),它可以檢測(cè)和刪除誤報(bào)閉環(huán)。當(dāng)使用 Extended Rauch–Tung–Striebel smoother 框架時(shí),人工閉環(huán)然后被注入到位姿圖中。
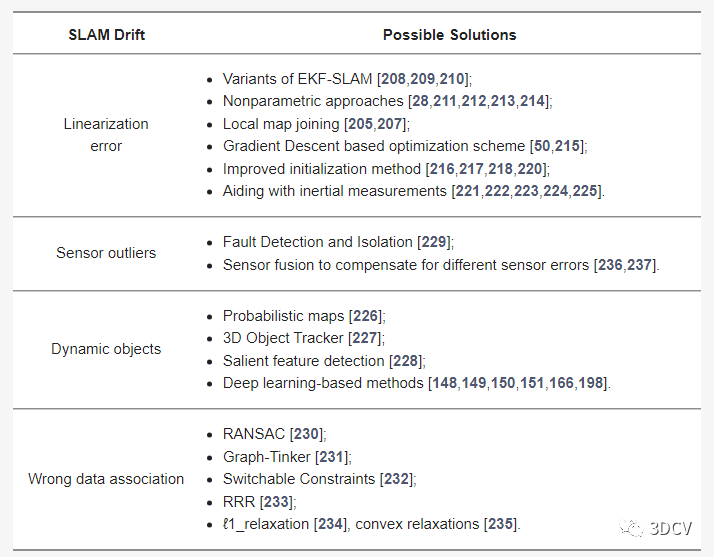
數(shù)據(jù)關(guān)聯(lián)挑戰(zhàn)也可以在后端步驟解決,因?yàn)槿匀挥锌赡軣o法完全消除異常值。可切換約束(SC)的概念在[ 232 ]中被引入,這樣一個(gè)可切換變量被引入到每個(gè)閉環(huán)約束中。一旦約束被視為異常值,就可以在優(yōu)化期間將其關(guān)閉。在[ 233 ]中,作者介紹了一種稱為實(shí)現(xiàn)、反轉(zhuǎn)和恢復(fù)(RRR)的算法,這是一種基于一致性的閉環(huán)驗(yàn)證方法。最近,Carlone 等人。[ 234 ]使用?1_relaxation來選擇“可靠”測(cè)量,Carlone和Calafiore[ 235] 使用凸松弛來解決非凸問題,而不需要對(duì)未知姿勢(shì)進(jìn)行初始猜測(cè)。表 2總結(jié)了 SLAM 漂移的潛在原因和相應(yīng)的建議解決方案。
表 2. SLAM 漂移的潛在原因和解決方案。
4.4. 缺乏質(zhì)量控制
SLAM 算法的定量評(píng)估是另一個(gè)重要的挑戰(zhàn)。有一些評(píng)估 SLAM 算法的標(biāo)準(zhǔn),例如它們的準(zhǔn)確性、可擴(kuò)展性、可用性、恢復(fù)性(即在大比例地圖內(nèi)定位車輛的能力)和可更新性。對(duì) SLAM 算法的性能進(jìn)行定量分析是必不可少的,因?yàn)樗鼈兛梢蕴峁?shù)值評(píng)估和比較不同 SLAM 算法的基礎(chǔ)。
估計(jì)精度是一種廣泛使用的質(zhì)量分析指標(biāo),但在自動(dòng)駕駛實(shí)踐中可能很困難。大多數(shù)方法通過使用例如精確地圖將結(jié)果與地面實(shí)況進(jìn)行比較來評(píng)估 SLAM 算法的性能。然而,很少有合適的地面實(shí)況圖。有時(shí),估計(jì)的地圖是通過將其疊加到平面圖上并搜索差異來評(píng)估的[ 238 ],這對(duì)于戶外應(yīng)用來說更難,需要人工干預(yù)[ 239 ]。Sturm 等人提出了兩種流行的精度指標(biāo),即相對(duì)位姿誤差 (RPE) 和絕對(duì)軌跡誤差 (ATE)。[ 240] 它通過將估計(jì)的相機(jī)運(yùn)動(dòng)與真實(shí)軌跡進(jìn)行比較來評(píng)估視覺 SLAM 系統(tǒng),而不是進(jìn)行復(fù)雜的地圖比較。RPE 測(cè)量固定時(shí)間間隔內(nèi)軌跡的局部精度,而 ATE 比較估計(jì)軌跡和地面真實(shí)軌跡之間的絕對(duì)距離,從而估計(jì)全局一致性。這兩條軌跡應(yīng)首先使用 Horn 方法 [ 240 ]對(duì)齊。根據(jù) [ 240],RPE同時(shí)考慮平移誤差和旋轉(zhuǎn)誤差,而ATE只考慮平移誤差。這些指標(biāo)已被 SLAM 社區(qū)廣泛用于評(píng)估和比較不同的 SLAM 方法。然而,與地圖類似,車輛軌跡在實(shí)際路面上的精確位置可能并不總是可用的。在[ 239 ]中,作者提出了一個(gè)框架,通過測(cè)量修正軌跡的誤差來分析 SLAM 的準(zhǔn)確性。車輛姿態(tài)的均方根誤差(RMSE)通常用于指示SLAM軌跡估計(jì)結(jié)果的準(zhǔn)確性。另一種廣泛使用的質(zhì)量分析方法是卡方 (χ 2 ) 檢驗(yàn)。根據(jù) [ 241 ],χ 2test 是一種統(tǒng)計(jì)測(cè)試,用于量化為地標(biāo)測(cè)量和里程計(jì)誤差提供的協(xié)方差矩陣的質(zhì)量。當(dāng)最小的 χ2誤差幾乎等于測(cè)量向量的維數(shù)與狀態(tài)向量的大小之差時(shí),該測(cè)量將被認(rèn)為具有良好的質(zhì)量[ 241 ]。
一些研究人員 [ 242、243、244 ]已經(jīng)考慮了他們的 SLAM算法的一致性。根據(jù)[ 242 ],SLAM不一致的主要原因是由不正確的里程計(jì)模型和SLAM非線性函數(shù)的不準(zhǔn)確線性化引起的累積誤差。當(dāng)估計(jì)誤差超出不確定性時(shí),可以認(rèn)為估計(jì)結(jié)果不一致。EKF-SLAM 會(huì)遇到這樣的不一致問題,除非圍繞真實(shí)系統(tǒng)狀態(tài)評(píng)估觀察/里程計(jì)函數(shù)的雅可比矩陣。在 [ 30 ] 和 [ 245],使用度量指標(biāo)歸一化估計(jì)誤差平方(NEES)定量確定了fastSLAM和EKF-SLAM算法的一致性。在[ 246 ]中,分析了濾波器錯(cuò)誤狀態(tài)模型的可觀測(cè)性,以研究 EKF-SLAM 不一致的根本原因。在 [ 247 ]的工作中,通過對(duì)測(cè)量殘差的加權(quán)和應(yīng)用χ2檢驗(yàn)來檢查增量圖 SLAM 的一致性。是否可以容忍不一致最終取決于SLAM結(jié)果的應(yīng)用[ 19 ]。
還應(yīng)檢查定位、制圖和導(dǎo)航系統(tǒng)輸出的可靠性。然而,很少有研究對(duì)SLAM的可靠性進(jìn)行定量分析。其他定位系統(tǒng)(如 GNSS、GNSS/INS)的一些可靠性研究可以作為指導(dǎo) SLAM 社區(qū)的參考。系統(tǒng)可靠性可以被認(rèn)為具有兩個(gè)組成部分:內(nèi)部可靠性和外部可靠性。前者確定系統(tǒng)檢測(cè)故障的能力,該能力由最小可檢測(cè)偏差 (MDB) 量化,并由可檢測(cè)故障的下限表示。后者估計(jì)未檢測(cè)到的故障對(duì)最終解決方案的影響 [ 175 , 248 , 249 , 250 , 251]. MDB 值越低,系統(tǒng)越可靠。同樣,SLAM系統(tǒng)特征觀測(cè)模型和車輛運(yùn)動(dòng)模型的可靠性也可以通過這些方法進(jìn)行評(píng)估。
完整性非常重要,因?yàn)樗潜镜鼗到y(tǒng)提供的信息“可信度”的指標(biāo),可以及時(shí)警告不準(zhǔn)確造成的風(fēng)險(xiǎn) [252 ]。完整性度量用于量化本地化安全的要求。該概念首先在航空領(lǐng)域確立,也適用于陸地車輛定位[ 253]. 由于自動(dòng)駕駛對(duì)安全性的嚴(yán)格要求,自動(dòng)駕駛研究者對(duì)完整性的關(guān)注度越來越高。自動(dòng)駕駛汽車的定位和導(dǎo)航是基于多個(gè)傳感器的使用,因此傳統(tǒng)的 GNSS 完整性分析方法應(yīng)該得到擴(kuò)展。故障檢測(cè)和隔離 (FDI) 是最流行的基于 GNSS定位的警報(bào)生成方法之一 [ 229、254、255、256 ]。
5. 基于激光雷達(dá)/GNSS/INS 的測(cè)繪和定位:案例研究
基于激光雷達(dá)的同步定位和建圖 (SLAM) 技術(shù)方法在機(jī)器人領(lǐng)域得到廣泛研究和應(yīng)用,因?yàn)榧す饫走_(dá)可以生成非常密集的 3D 點(diǎn)云,具有快速傳感速率和高精度。通常 SLAM 系統(tǒng)會(huì)經(jīng)歷隨著行進(jìn)距離增加而增加的估計(jì)誤差,因此需要“閉環(huán)”來糾正誤差。然而,在一些大規(guī)模的自動(dòng)駕駛戶外應(yīng)用中,例如在高速公路上行駛,或者在城市地區(qū)進(jìn)行復(fù)雜的軌跡行駛,閉環(huán)是很難實(shí)現(xiàn)的。此外,僅限激光雷達(dá)的 SLAM 將僅提供相對(duì)定位信息。因此,GNSS/INS與激光雷達(dá)SLAM的結(jié)合將有效降低對(duì)閉環(huán)的依賴,提供絕對(duì)定位信息。
此外,當(dāng) GNSS 信號(hào)不可用時(shí),激光雷達(dá)系統(tǒng)還可以支持使用現(xiàn)有的高清地圖進(jìn)行定位。此處測(cè)試了結(jié)合激光雷達(dá)、GNSS 和 INS 的現(xiàn)代化 SLAM 程序。該程序包含兩部分:基于激光雷達(dá)/GNSS/INS 的離線測(cè)繪部分,以及基于激光雷達(dá)/高清地圖的在線定位和測(cè)繪部分。
5.1. 實(shí)驗(yàn)設(shè)置
在澳大利亞悉尼的一些市區(qū)進(jìn)行了陸地車輛測(cè)試,以測(cè)試擬議的 Lidar/GNSS/INS 多傳感器系統(tǒng)。該車輛配備了一個(gè) VLP-16 LiDAR 傳感器、一個(gè)戰(zhàn)術(shù)級(jí) IMU 傳感器和兩個(gè)來自美國加利福尼亞州圣何塞的 PolyExplore, Inc. 的 GNSS 天線(圖 5 )。第二根天線可用于為在線定位系統(tǒng)提供雙天線輔助航向更新。激光雷達(dá)的采樣率為 10Hz,GNSS 的采樣率為 1Hz,IMU 為 100Hz。
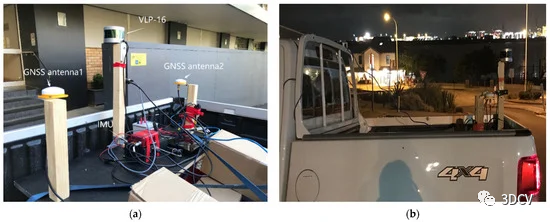
圖 5.實(shí)驗(yàn)平臺(tái):(a) 多傳感器系統(tǒng),(b) 安裝在車輛內(nèi)的系統(tǒng)側(cè)視圖。
路試軌跡如圖6a所示。車輛從位于肯辛頓的新南威爾士大學(xué)(UNSW)校園開往La Perouse(Section A),然后返回UNSW(Section B)。在本研究中,前向旅程(從 UNSW 到 La Perouse)用于生成道路的高精度 3D 點(diǎn)云地圖,而后向旅程(從 La Perouse 到 UNSW)用于測(cè)試激光雷達(dá)/基于3D點(diǎn)云地圖的定位方法。
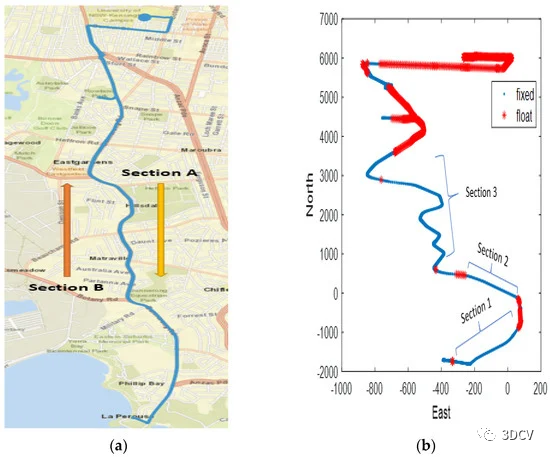
圖 6.(a) 谷歌地圖上的道路測(cè)試軌跡(藍(lán)色);(b) 局部坐標(biāo)系中具有 RTK 定位狀態(tài)的整個(gè)軌跡的 GNSS/INS 定位。
為了對(duì)定位性能進(jìn)行定量分析,選擇了軌跡的三個(gè)部分(圖 6 b)。對(duì)于行駛軌跡上的每個(gè)選定路段,前向行程和后向行程的 GNSS-RTK 狀態(tài)均為“整數(shù)模糊固定”。因此,離線建圖結(jié)果預(yù)計(jì)在 5 厘米左右的水平上是準(zhǔn)確的。對(duì)于回程(從 La Perouse 到 UNSW),所選路段將有準(zhǔn)確的 GNSS/INS 定位結(jié)果作為參考,以評(píng)估基于激光雷達(dá)/3D 點(diǎn)云地圖的定位方法的性能。
5.2. 激光雷達(dá)/GNSS/INS 制圖
獲取的前進(jìn)旅程數(shù)據(jù)集(從 UNSW 到 La Perouse)用于生成道路環(huán)境的地理參考點(diǎn)云圖。地理參考地圖是使用激光雷達(dá)里程計(jì)幀到幀匹配和 GNSS/INS 定位/姿態(tài)生成的。圖 7顯示了離線地圖系統(tǒng)架構(gòu)的概覽。
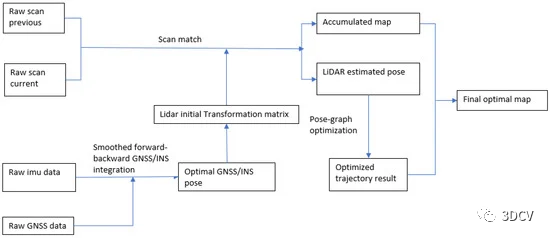
圖 7.激光雷達(dá)/GNSS/INS 測(cè)繪系統(tǒng)架構(gòu)概覽。
GNSS/INS系統(tǒng)可以提供大地定位和姿態(tài)信息。由于此地圖生成是離線執(zhí)行的,因此可以獲得最佳 GNSS/INS 軌跡。GNSS/INS 導(dǎo)出的位置和姿態(tài)結(jié)果用作逐幀匹配的初始值,以將新合并的點(diǎn)云傳輸?shù)絽⒖紟_@樣,點(diǎn)云就可以進(jìn)行地理配準(zhǔn)。當(dāng) GNSS 結(jié)果不可用時(shí),慣性導(dǎo)航 6-DOF 姿態(tài)結(jié)果可用于在重新獲取 GNSS 信號(hào)之前生成初始轉(zhuǎn)換。在進(jìn)行激光雷達(dá)測(cè)距時(shí),使用正態(tài)分布變換 (NDT) 掃描匹配算法將每個(gè)當(dāng)前幀與前一幀進(jìn)行匹配,初始變換信息由 GNSS/INS 提供。圖8),匹配前通過無損檢測(cè)提高配準(zhǔn)精度。
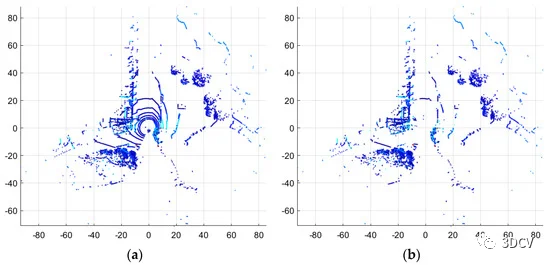
圖 8.激光雷達(dá)掃描框架的掃描視圖 (a) 原始掃描視圖;(b) 預(yù)處理后的視圖。
圖 9顯示了匹配前的兩個(gè)掃描視圖。看起來這兩個(gè)掃描視圖在特征上略有不同。可以生成來自兩個(gè)掃描視圖的匹配點(diǎn)云(圖 10)。
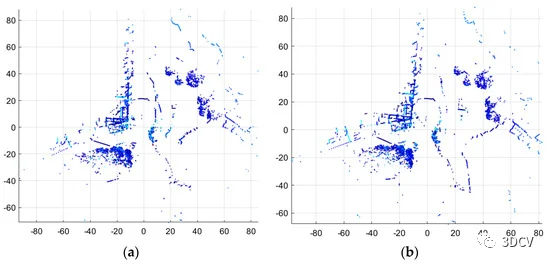
**圖 9.**用于掃描匹配 的兩個(gè)有序激光雷達(dá)掃描幀((a) 先前掃描幀;(b ) 當(dāng)前掃描幀)的掃描視圖。
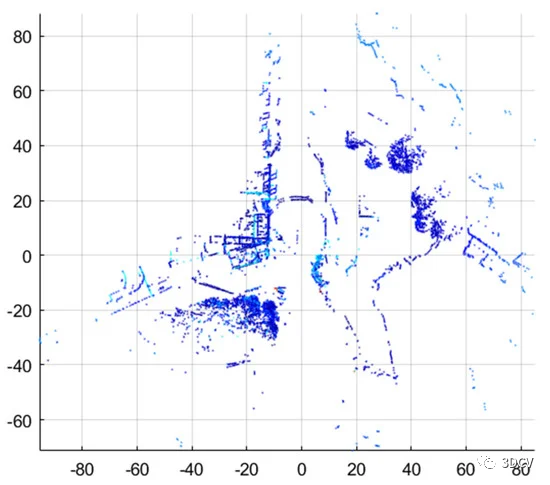
圖 10.匹配兩個(gè)排序的激光雷達(dá)掃描幀后生成的地圖點(diǎn)云。
通過對(duì)所有可用的激光雷達(dá)掃描依次進(jìn)行激光雷達(dá)測(cè)距,可以將新匹配的點(diǎn)云與先前生成的點(diǎn)云地圖合并,可以獲得整個(gè)軌跡的累積地圖并進(jìn)行地理配準(zhǔn),如圖 11所示。
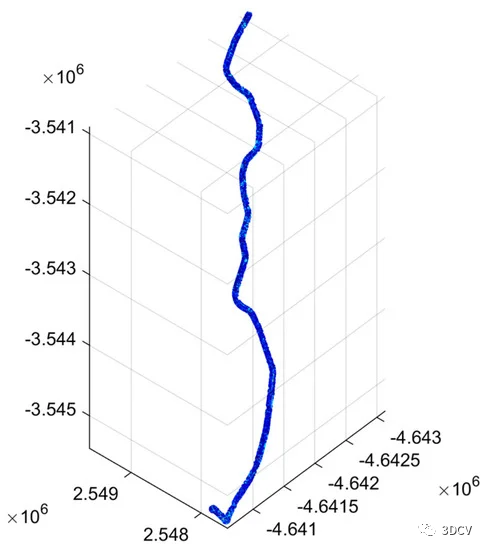
圖 11.從 UNSW 到 La Perouse 的全球地理參考路線圖(框架:ECEF,單位:米)來自基于 3D 點(diǎn)云的地圖。
通過放大圖 11,可以看到道路地圖的細(xì)節(jié),并且可以將其對(duì)應(yīng)的真實(shí)世界道路視圖與 Google Earth 圖像進(jìn)行比較(因?yàn)樵摰貓D是地理參考的)。圖 12顯示了此生成地圖的一個(gè)放大部分與 Google Earth 中相應(yīng)視圖的比較。
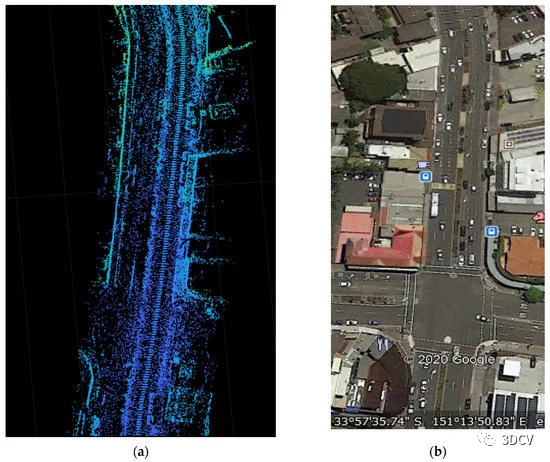
圖 12. (a) 生成的地圖和 (b) 同一位置的 Google 地球視圖 的一部分。
這張生成的地圖很好地展示了道路環(huán)境的結(jié)構(gòu),包括道路邊緣、建筑物、樹木和沿路停放的車輛。
三個(gè)坐標(biāo)已知的控制點(diǎn)位于 UNSW Scientia Lawn 周圍。這些控制點(diǎn)可用于評(píng)估生成的點(diǎn)云的準(zhǔn)確性。通過將地圖內(nèi)已識(shí)別控制點(diǎn)的坐標(biāo)與實(shí)際已知位置進(jìn)行比較,發(fā)現(xiàn) X、Y 和 Z 軸上的差異約為 2-8 厘米。因此,離線生成的地圖精度被認(rèn)為是5厘米。
5.3. 使用激光雷達(dá)掃描和 GeoReferenced 3D 點(diǎn)云地圖匹配進(jìn)行定位
根據(jù) A 部分(從 UNSW 到 La Perouse 的前向旅程)的數(shù)據(jù)生成的地理參考 3D 點(diǎn)云地圖可以用于支持 B 部分(從 La Perouse 到 UNSW 的后向旅程)的基于激光雷達(dá)的定位,方法是匹配激光雷達(dá)掃描到地圖。基于在線激光雷達(dá)/3D 地圖匹配的定位方法的過程如圖 13所示. INS 用于支持基于激光雷達(dá)/3D 地圖的在線定位。為了顯示不同融合級(jí)別的性能,研究了兩種融合方法。第一種方法簡(jiǎn)單地利用 IMU 作為輔助傳感器,直接使用 INS 解決方案作為掃描/地圖匹配的初始信息。第二種融合方法是一種緊耦合方法,它不僅使用 INS 解決方案來支持匹配,而且還包含一個(gè)基于 EKF 的錯(cuò)誤狀態(tài)更新步驟,可增強(qiáng)慣性導(dǎo)航性能。
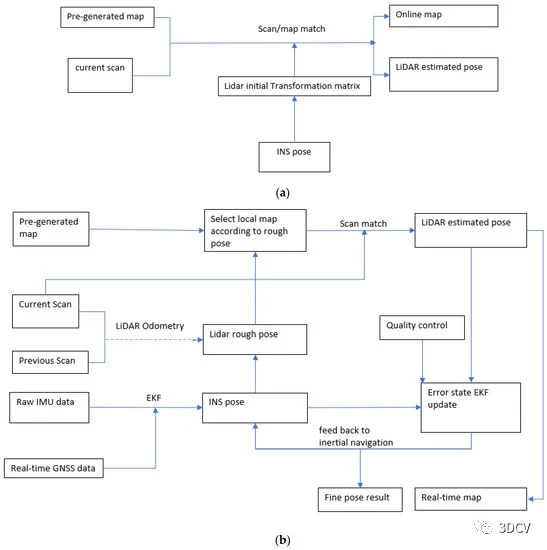
圖 13.擬議的基于激光雷達(dá)/3D 地圖匹配的定位系統(tǒng)架構(gòu)概述。(a) 方法一:融合IMU作為輔助傳感器;(b) 方法 2:使用基于 EKF 的緊耦合方法融合 IMU。
方法2由兩部分組成:掃描匹配和EKF融合。首先,如果慣性導(dǎo)航信息不可用,可以使用幀到幀激光雷達(dá)里程計(jì)來支持定位。在初始化錯(cuò)誤狀態(tài) EKF 后,慣性導(dǎo)航估計(jì)的位姿將為當(dāng)前激光雷達(dá)掃描幀提供一個(gè)粗略的位姿,并且可以關(guān)閉激光雷達(dá)里程計(jì)以降低計(jì)算負(fù)荷。利用INS提供的粗略位置,從預(yù)先生成的全局地圖中搜索選擇局部地圖,提高匹配效率。當(dāng)前激光雷達(dá)框架和本地地圖之間基于無損檢測(cè)的掃描匹配是通過基于慣性的初始變換矩陣進(jìn)行的。可以獲得激光雷達(dá)估計(jì)的車輛姿態(tài)。如果需要,還可以生成新的實(shí)時(shí)路線圖。
得到激光雷達(dá)位姿后,可以得到激光雷達(dá)位姿與慣性傳播位姿的差值,通過誤差狀態(tài)EKF估計(jì)慣性導(dǎo)航信息內(nèi)的誤差,然后反饋給慣性系統(tǒng),改進(jìn)位姿結(jié)果和偏差估計(jì)。當(dāng)有 GNSS 信息時(shí),如 RTK 定位結(jié)果,也可用于修正慣性導(dǎo)航信息,以提高定位系統(tǒng)的準(zhǔn)確性和可靠性。
對(duì)于激光雷達(dá)、INS 和GNSS的數(shù)據(jù)融合,當(dāng)前的一些工作提出使用基于圖優(yōu)化的方法來生成最優(yōu)定位和建圖解決方案[ 179、257、258、259]. 然而,其中一些經(jīng)過后處理或高度依賴 GNSS 數(shù)據(jù)來減輕導(dǎo)航漂移,甚至忽略 IMU 偏差。由于對(duì)于我們基于在線激光雷達(dá)/地圖匹配的定位方法,可靠的慣性導(dǎo)航解決方案對(duì)于為掃描/地圖匹配過程提供良好的初始化以及提高本地地圖搜索和選擇的效率和準(zhǔn)確性至關(guān)重要,及時(shí)的 IMU偏差校正至關(guān)重要,使用 EKF 更容易實(shí)現(xiàn)。由于我們的測(cè)試是在 GNSS 信號(hào)經(jīng)常丟失的市區(qū)進(jìn)行的,因此對(duì) IMU 狀態(tài)的反饋也應(yīng)取決于激光雷達(dá)數(shù)據(jù),尤其是在 GNSS 中斷期間。此外,估計(jì)不確定性是分析系統(tǒng)解決方案的重要參數(shù),很少在基于圖的方法中估計(jì),但可以通過 EKF 方法直接估計(jì)。因此,在我們當(dāng)前的方法 2 中,EKF 方法用于融合激光雷達(dá)/地圖定位、GNSS 和慣性導(dǎo)航結(jié)果。方法 1 和方法 2 的比較還突出了將 IMU 傳感器用作單獨(dú)的輔助傳感器和用作緊密耦合的輔助傳感器之間的區(qū)別。
5.3.1. 激光雷達(dá)/3D 地圖定位系統(tǒng)的估計(jì)結(jié)果
由于本次城市道路測(cè)試沒有地面實(shí)況信息,因此將基于激光雷達(dá)/地圖匹配的解決方案與三個(gè)選定軌跡段內(nèi)的 GNSS/INS 解決方案進(jìn)行比較(圖 14),在此期間 RTK 狀態(tài)為“模糊固定” ”(圖 6b)。
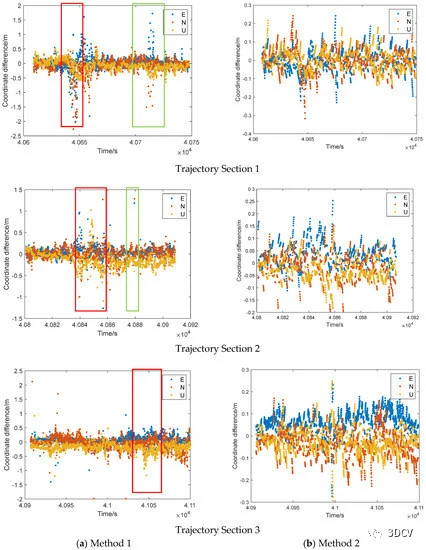
圖 14.所提出的基于激光雷達(dá)/地圖匹配的定位方法與參考 GNSS/INS 定位方法在三個(gè)軌跡部分的坐標(biāo)差異。(a) 方法一:融合IMU作為輔助傳感器;(b) 方法 2:使用基于 EKF 的緊耦合方法融合 IMU。紅色和綠色框表示具有不同時(shí)間戳的坐標(biāo)差異較大的時(shí)代。
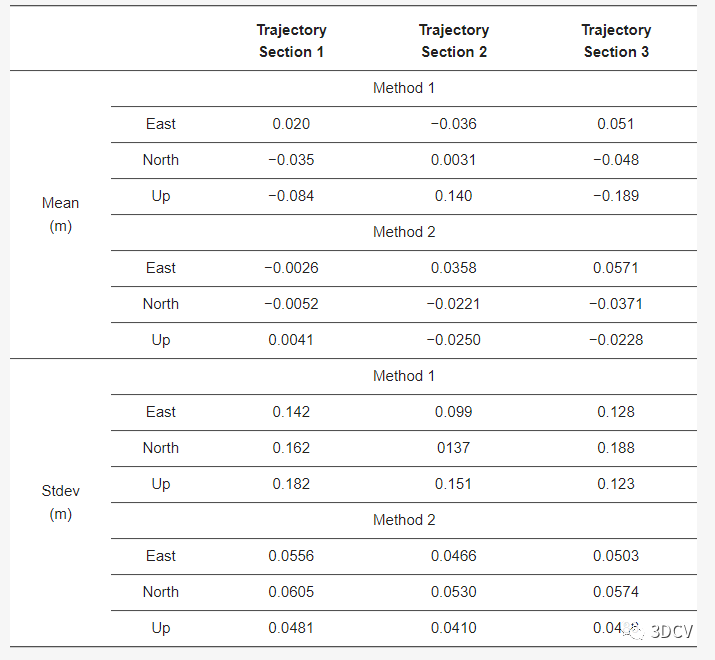
表 3顯示了基于激光雷達(dá)/地圖匹配的定位與參考 GNSS/INS 定位結(jié)果之間的比較。對(duì)于方法一,結(jié)果差異在零附近波動(dòng),它們的平均值在厘米到分米級(jí)別。所有三個(gè)部分的標(biāo)準(zhǔn)偏差都在 0.1-0.2 m 左右,因此我們將大于 0.6 m 的坐標(biāo)差異視為可能的異常值。具有異常值的 epoch 約占總測(cè)試數(shù)據(jù)的 1.7%,這意味著異常值的存在很少見。異常值的可能原因?qū)⒃谙乱还?jié)中討論。對(duì)于方法 2,結(jié)果具有更好的準(zhǔn)確性。標(biāo)準(zhǔn)偏差在0.05 m左右,遠(yuǎn)低于方法1。從圖14可以看出,在方法 1 顯示可能的異常值期間,方法 2 與參考值的差異較小,這表明緊耦合方法對(duì)異常值的魯棒性比簡(jiǎn)單地使用 INS 解決方案進(jìn)行初始化要強(qiáng)。
表 3.對(duì)于圖 14 中的軌跡部分 1、2 和 3,基于激光雷達(dá)/地圖匹配的定位與參考 GNSS/INS 定位結(jié)果之間差異的平均值和標(biāo)準(zhǔn)偏差。(a) 方法一:融合IMU作為輔助傳感器;(b) 方法 2:使用基于 EKF 的緊耦合方法融合 IMU。
5.3.2. 數(shù)值結(jié)果的質(zhì)量分析
檢查具有大跳躍的時(shí)期(例如圖 14中的“紅色和綠色框”期間)的測(cè)量細(xì)節(jié),以調(diào)查檢測(cè)到的異常值的可能原因。對(duì)于圖 14中的 Trajectory Section 1 (紅框),通過方法 1 發(fā)現(xiàn)在繞環(huán)島行駛時(shí),存在一些較大的異常值。Lidar/map 系統(tǒng)和 GNSS/INS 解決方案圍繞該環(huán)島的軌跡及其Google 地圖中的視圖如圖 15所示。可以看出,GNSS/INS 解決方案(圖 15黃線)在該區(qū)域更平滑,因?yàn)?GNSS 整數(shù)模糊度是“固定的”,而如果僅使用 IMU 作為簡(jiǎn)單助手,激光雷達(dá)/地圖解決方案與參考軌跡有一些差異(方法 1,圖 15 藍(lán)線)。
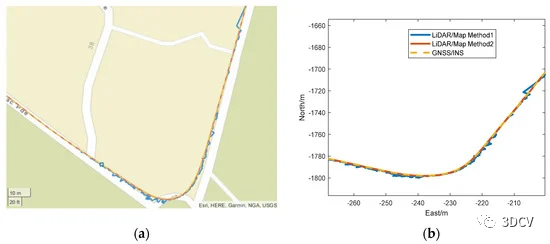
圖 15.基于激光雷達(dá)/地圖匹配的定位方法 1(藍(lán)色)、方法 2(紅色)和 GNSS/INS 定位(黃色)的軌跡:(a) Google 地圖中的視圖;(b) 在環(huán)島周圍的局部坐標(biāo)系中查看。
圖 16顯示了該環(huán)島的地圖視圖。可以看出,道路駕駛側(cè)的預(yù)生成地圖結(jié)構(gòu)不是很清晰,因?yàn)樗鄙佘壽E周圍的特征。回旋處位于旅游景點(diǎn)的停車場(chǎng)。該地區(qū)周圍沒有建筑物,樹木也很少。由于測(cè)試是在晚上進(jìn)行的,因此可以用作特征的停放車輛并不多。因此,匹配步驟的質(zhì)量可能較差,從而導(dǎo)致定位精度下降。
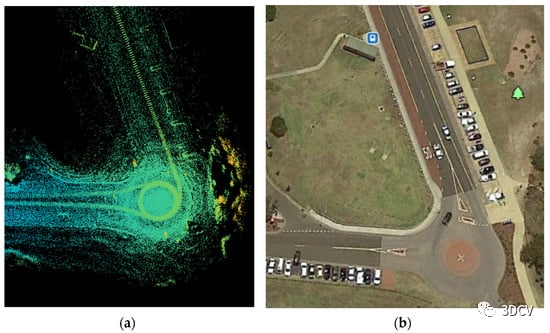
圖 16. (a) 生成的地圖和 (b) 環(huán)島周圍相同位置的 Google Earth 視圖 的一部分。
圖 17顯示了此時(shí)距離閾值為 20 m 的激光雷達(dá)掃描視圖,可以看出該激光雷達(dá)掃描沒有太多可用的特征,尤其是在預(yù)處理之后。當(dāng)軌跡部分 1(綠色框)中出現(xiàn)另一組異常值時(shí),可以找到具有較少特征的類似道路環(huán)境,如圖14所示。在這種情況下,擴(kuò)展范圍閾值可以通過包含更多特征來提高準(zhǔn)確性,但是,它會(huì)增加計(jì)算負(fù)擔(dān)并受到更多異常源的影響。通過更緊密地融合 IMU 來合并慣性運(yùn)動(dòng)模型可能會(huì)使定位系統(tǒng)對(duì)這種無特征的條件更加穩(wěn)健(圖 15紅線)。
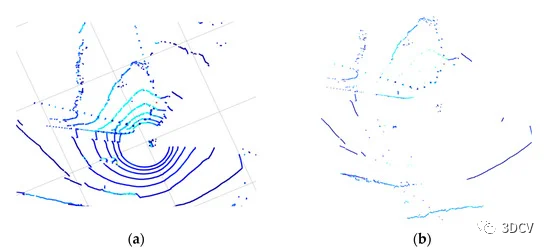
圖 17.環(huán)島周圍軌跡部分 1 中具有大異常值的紀(jì)元 40,647 s 的掃描幀((a) 原始掃描視圖;(b) 預(yù)處理后的視圖)。
異常值的另一個(gè)主要來源是主車輛周圍的其他移動(dòng)實(shí)體。圖 18、圖 19和圖 20顯示了在定位階段存在較大異常值時(shí)的激光雷達(dá)視圖。
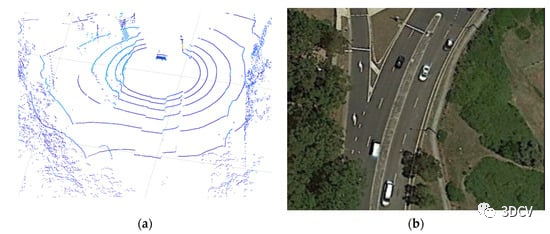
圖 18.軌跡部分 2 中具有大異常值的歷元 40,854 s 的掃描幀:后面的車輛正在駛向另一條道路,(a) 激光雷達(dá)掃描;(b) 谷歌地球視圖。
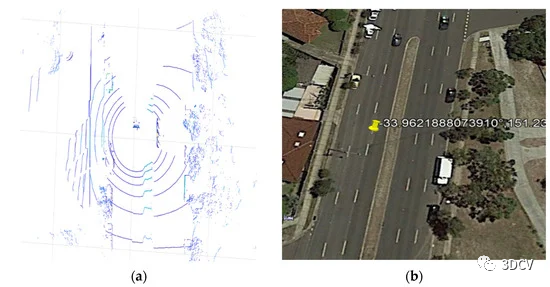
圖 19.軌跡部分 2 中具有大異常值的歷元 40,888 s 的掃描幀,檢測(cè)到對(duì)向駕駛車輛,(a) 激光雷達(dá)掃描;(b) 谷歌地球視圖。
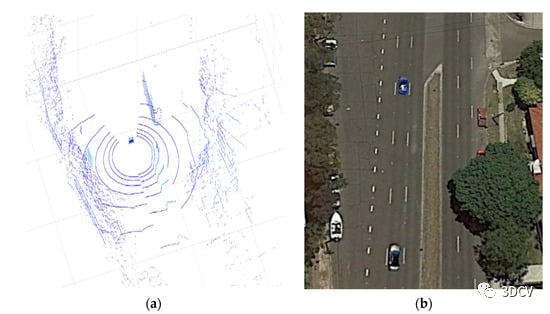
圖 20.軌跡第 3 節(jié)中具有大離群值的歷元 41,103 s 的掃描幀,一輛高大的公共汽車駛過 (a) 激光雷達(dá)掃描;(b) 谷歌地球視圖。
無論其他移動(dòng)車輛是在道路的同一側(cè)還是在道路的另一側(cè),這樣的移動(dòng)車輛都會(huì)影響基于激光雷達(dá)/地圖匹配的定位的質(zhì)量。當(dāng)移動(dòng)車輛與本車在道路同一側(cè)時(shí),最初檢測(cè)到或與本車速度不同,或轉(zhuǎn)彎行駛到另一條道路時(shí),都會(huì)導(dǎo)致錯(cuò)誤估計(jì)。這將使該車輛不再被檢測(cè)到(圖 14軌跡部分 2 和圖 18中的紅色框)。
一旦宿主車輛檢測(cè)到對(duì)面行駛的車輛,定位估計(jì)誤差可能達(dá)到 1-1.5 m(圖 14軌跡部分 2 和圖 19中的綠色框)。
移動(dòng)元素的類型也會(huì)影響異常值的存在。大多數(shù)時(shí)候,垂直位置估計(jì)受移動(dòng)元素的影響較小。但是,勾選Trajectory Section 3(圖14 )中的紅框,可以發(fā)現(xiàn)垂直方向的差異遠(yuǎn)高于其他部分。通過查看激光雷達(dá)視圖的細(xì)節(jié),發(fā)現(xiàn)在那個(gè)路段,一輛高大的公共汽車從主車輛旁邊駛過(圖 20 ),這意味著當(dāng)前激光雷達(dá)掃描和預(yù)先生成的地圖之間的垂直差異可能導(dǎo)致一些系統(tǒng)的垂直偏差。
道路環(huán)境中的移動(dòng)物體將是測(cè)量異常值的主要來源,因?yàn)橄到y(tǒng)將預(yù)先生成的地圖視為固定參考地圖。因此,如果有任何移動(dòng)物體導(dǎo)致預(yù)生成地圖和當(dāng)前掃描幀的結(jié)構(gòu)不同,就會(huì)出現(xiàn)異常值。移動(dòng)物體,例如其他車輛,可能存在于先前的道路測(cè)繪階段和當(dāng)前的道路掃描中以用于定位。對(duì)于離線高清地圖生成步驟,應(yīng)仔細(xì)識(shí)別并從靜態(tài) 3D 點(diǎn)云地圖中刪除此類移動(dòng)對(duì)象。對(duì)于在線步驟,可以基于清潔的預(yù)生成地圖來識(shí)別和刪除移動(dòng)對(duì)象,或者直接使用傳感器數(shù)據(jù)實(shí)現(xiàn)語義分割。166 ] 可以區(qū)分基于 CNN 的運(yùn)動(dòng)和靜止物體。因此,可以去除可能檢測(cè)到的移動(dòng)物體,或者可以將可能的道路環(huán)境變化更新到全局地圖中,以提高未來在同一道路路徑上行駛的準(zhǔn)確性。這些方法可以在感知步驟中進(jìn)行。一些數(shù)值質(zhì)量控制方法的幫助也可能有助于在定位和建圖步驟中完成這項(xiàng)任務(wù),例如 FDI 方法,或離群點(diǎn)檢測(cè)和識(shí)別方法,它可以直接估計(jì)和減輕來自各種資源的離群點(diǎn)的影響,不僅是移動(dòng)異常值,還有其他傳感器或模型故障。
一些FDI方法或完整性監(jiān)測(cè)方法[ 255 , 256 ]已經(jīng)成功應(yīng)用于EKF框架下的GNSS/INS集成系統(tǒng)。由于在本案例研究中,EKF 方法用于融合激光雷達(dá)/地圖定位結(jié)果和 INS 姿勢(shì)以生成高頻精確姿勢(shì)解決方案,因此這些質(zhì)量控制方法也表明了該定位系統(tǒng)的潛力。這將是未來的研究課題。
6、結(jié)論
本文簡(jiǎn)要回顧了不同的 SLAM 方法及其特點(diǎn)。SLAM 已成為自動(dòng)駕駛中定位、建圖、規(guī)劃和控制的關(guān)鍵方法。它顯示了在為自動(dòng)駕駛和道路環(huán)境中的車輛定位生成高分辨率地圖方面取得了可喜的進(jìn)展。已經(jīng)確定了不同 SLAM 技術(shù)的優(yōu)點(diǎn)和缺點(diǎn),并討論了它們?cè)谧詣?dòng)駕駛中的應(yīng)用。
定位和導(dǎo)航算法的可信度是自動(dòng)駕駛的一個(gè)重要問題。有許多挑戰(zhàn)限制了 SLAM 技術(shù)的性能,從而影響定位和導(dǎo)航結(jié)果的安全性。本綜述中提到了這些具有挑戰(zhàn)性的問題和可能的解決方案。此外,為了確保安全性,應(yīng)從準(zhǔn)確性、一致性、精確性、可靠性和完整性等方面對(duì)算法的性能進(jìn)行定量評(píng)估。簡(jiǎn)要討論了評(píng)估這些質(zhì)量的方法。
進(jìn)行了真實(shí)世界的道路測(cè)試,以演示 SLAM 在具有多傳感器集成的自動(dòng)駕駛中的應(yīng)用。數(shù)值結(jié)果表明,GNSS/INS 輔助激光雷達(dá)系統(tǒng)可以生成地理參考高密度點(diǎn)云地圖。這張預(yù)先生成的地圖可以用來支持在線定位,已經(jīng)達(dá)到了厘米級(jí)的精度。這種基于激光雷達(dá)/地圖匹配的定位方法也可用于在 GNSS 信號(hào)不可用期間支持自動(dòng)駕駛系統(tǒng),這使其適用于市區(qū)駕駛。IMU 測(cè)量值的更緊密耦合融合將使基于激光雷達(dá)/地圖的定位比簡(jiǎn)單地利用慣性解決方案作為輔助信息更準(zhǔn)確和對(duì)異常值更穩(wěn)健。
未來的研究應(yīng)該集中在如何檢測(cè)移動(dòng)實(shí)體并減輕它們?cè)?3D 點(diǎn)云建圖和定位過程中的影響。此外,應(yīng)研究此類基于激光雷達(dá)/GNSS/INS 的車輛定位和繪圖系統(tǒng)的完整性監(jiān)控程序。
-
SLAM
+關(guān)注
關(guān)注
23文章
426瀏覽量
31900 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4024瀏覽量
190290 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13924瀏覽量
166864
原文標(biāo)題:用于自動(dòng)駕駛的同步定位和建圖 (SLAM):概念和分析
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛真的會(huì)來嗎?
細(xì)說關(guān)于自動(dòng)駕駛那些事兒
自動(dòng)駕駛的到來
UWB主動(dòng)定位系統(tǒng)在自動(dòng)駕駛中的應(yīng)用實(shí)踐
讓機(jī)器人完美建圖的SLAM 3.0到底是何方神圣?
自動(dòng)駕駛汽車的定位技術(shù)
如何讓自動(dòng)駕駛更加安全?
UWB高精度定位在自動(dòng)駕駛中的應(yīng)用前景
UWB定位可以用在自動(dòng)駕駛嗎
基于視覺的slam自動(dòng)駕駛
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
低速自動(dòng)駕駛車輛的定位與建圖

自動(dòng)駕駛中的SLAM
一種基于RGB-D圖像序列的協(xié)同隱式神經(jīng)同步定位與建圖(SLAM)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論