 科聰控制系統助力鑄造行業向“智能”實現“質”的突破!
科聰控制系統助力鑄造行業向“智能”實現“質”的突破!
此項目現場為傳統鑄造業,鑄造是裝備制造業發展不可或缺的重要環節,是眾多主機和重大技術裝備發展的重要支撐。該現場以往由人工遙控車輛來進行物資的挪動,現投運搭載科聰控制系統的AGV來代替人工用遙控車輛來移動物資。實現上位機上一鍵發送任務,AGV就能自動去執行一系列任務,完成自動化搬運物資。作為代替傳統人工操作,本次AGV實施有著較大的意義,是傳統鑄造業往智能發展的重要一步。
科聰提供一體化整體解決方案
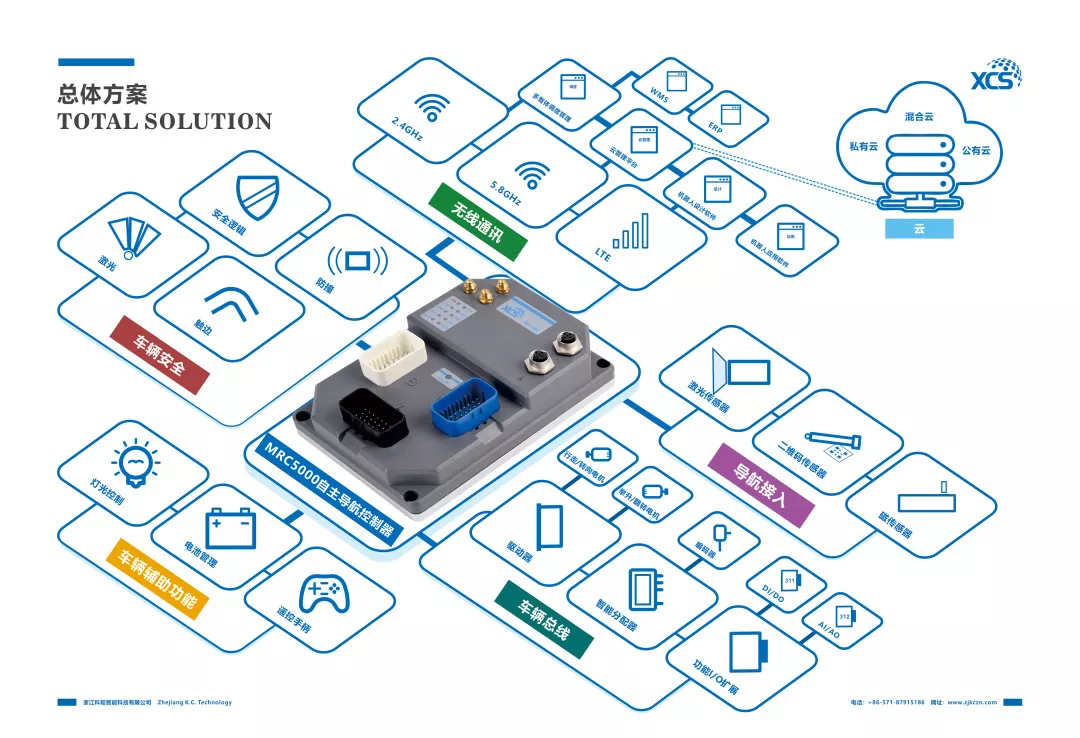
科聰在了解項目需求后,為項目提供“科聰MRC系列導航控制系統+機器人調度軟件”軟硬件為主的整體解決方案。科聰自主研發的MRC控制系統,對上層系統、下層系統緊密對接,針對現場不同的設計需求,進行了優化以及定制開發,滿足其廠區現場惡劣作業環境和工況。
項目應用難點對策
01 車輛體積大
此現場應用的六舵輪搬運車承重要求高,車體體積較大,對導航精度要求極高。
對策:科聰高精度導航控制系統
科聰控制系統具有行業領先的導航定位性能,可實現最高+5mm導航精度和最高±0.5”角度控制。面對車體較大的移動機器人,科聰控制系統可以減小運行誤差,助力項目落地。
02 現場制造環境地面油漬污染嚴重
由于鑄造業的特殊工藝性,制造現場往往會出現地面油漬污染問題,車輛橫移過程中會出現打滑問題。
對策:軟件程序邏輯判斷
科聰二次開發平臺,可作程序邏輯判斷分解橫移時其各個方向輪子時正確的角度,檢測是否正確,結合反光板絕對定位,避免出現打滑問題。
03 現場搬運道路相對較窄
現場搬運路徑窄,且車輛較大,轉彎時傳統的直線以及曲線,小于車輛轉彎所需的轉彎半徑,會出現車輛難轉彎現象,進而對物資經行損害。
對策:窄巷道高精度控制功能
路徑窄,對于車輛的導航精度及到點精度很高,通過應用科聰MRC系列導航控制系統,可達到導航±5mm精度,結合科聰應用軟件窄巷道高精度控制功能,在參數上可以設置提前轉彎,以及延后轉彎來通過那些狹窄的通道,可高精度控制轉彎時會出現的誤差,避免出現轉彎難問題。
此次投運實現對人力替代完成搬運貨物的準確作業,并保障了生產和倉儲作業的安全性、穩定性。此外,科聰自主研發的MRC控制系統,對上層系統、下層系統緊密對接,針對現場不同的設計需求,進行了優化以及定制開發,滿足其廠區現場惡劣作業環境和工況。
在車輛本體廠商和科聰共同力量下,將移動機器人投用到鑄造行業,極大加速了鑄造行業向智能化發展的步伐。選擇科聰控制系統,是各行各業邁向智能化的“快車道”。
-
AMR
+關注
關注
3文章
438瀏覽量
30317 -
移動機器人
+關注
關注
2文章
765瀏覽量
33607 -
AGV小車
+關注
關注
4文章
173瀏覽量
11173
發布評論請先 登錄
相關推薦

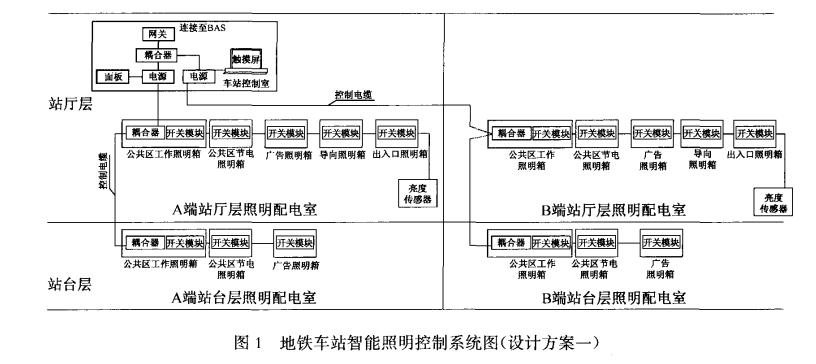
工廠照明智能控制系統
日光溫室智能控制系統
PCAN工程機械應用新突破,如何讓智能壓路機控制系統更高效?

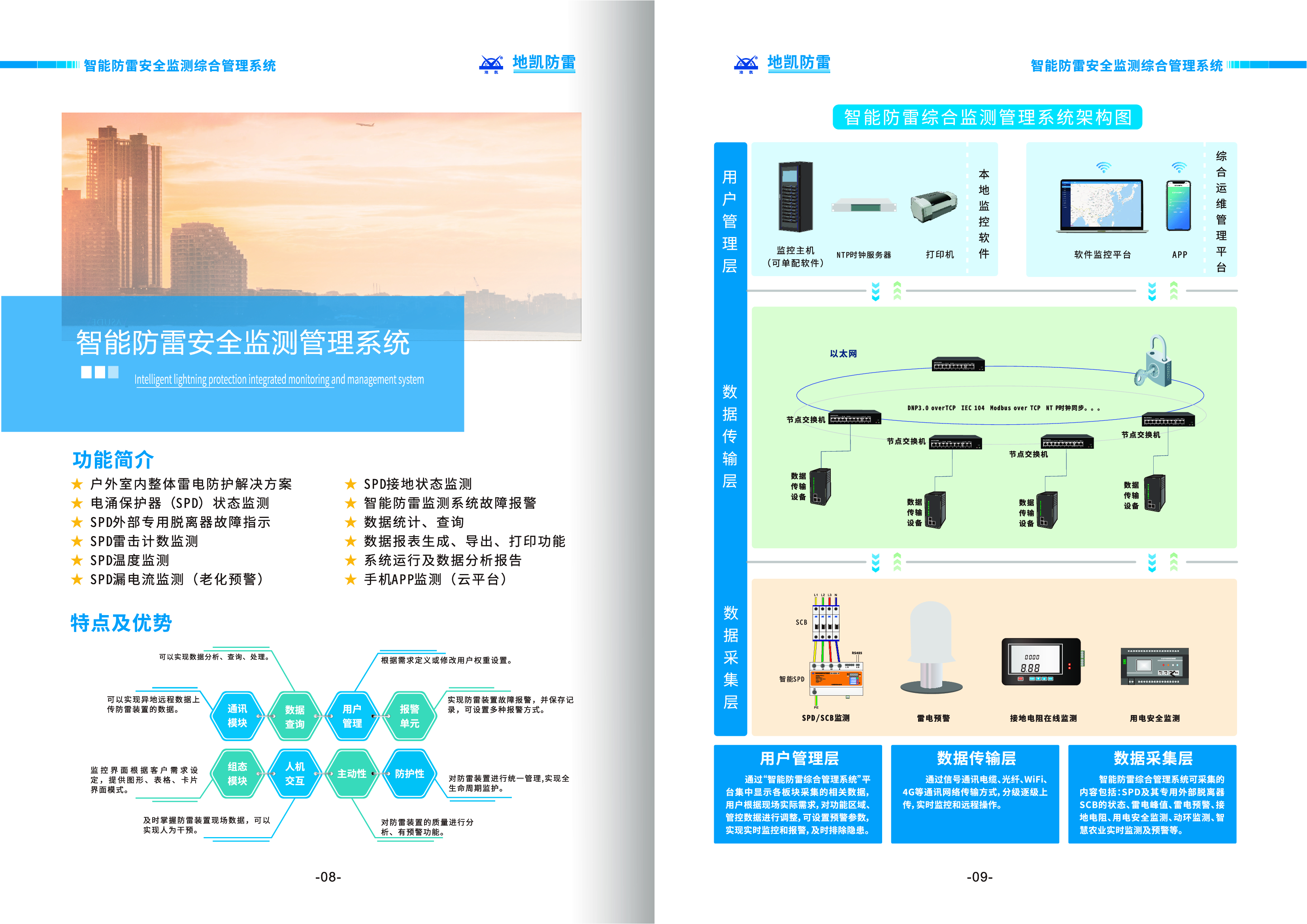
智能防雷遠程終端控制系統解決方案
家居空調智能控制系統應用
智能路燈遠程控制系統
揭秘起重行業IO模塊應用,助力智能高效作業!
智能家居控制系統如何設計
AGV是什么? ——科聰智能自主導航控制系統





 工商網監
工商網監
評論