") 暢行無阻 | AS-33C激光雷達(dá),如何靈巧躲避每一個障礙物?
暢行無阻 | AS-33C激光雷達(dá),如何靈巧躲避每一個障礙物?
【
安全
避障
】
一臺AGV正穿梭在無人工廠內(nèi)
當(dāng)它的前方出現(xiàn)障礙物,會發(fā)生意外嗎?
明治避障激光雷達(dá)的各類經(jīng)典應(yīng)用,采用的是TOF工作原理。精度高,反應(yīng)速度快是TOF型激光雷達(dá)的主要優(yōu)勢,這種特性使得它成為工業(yè)場景AGV/AMR小車?yán)走_(dá)選型的理想選擇。
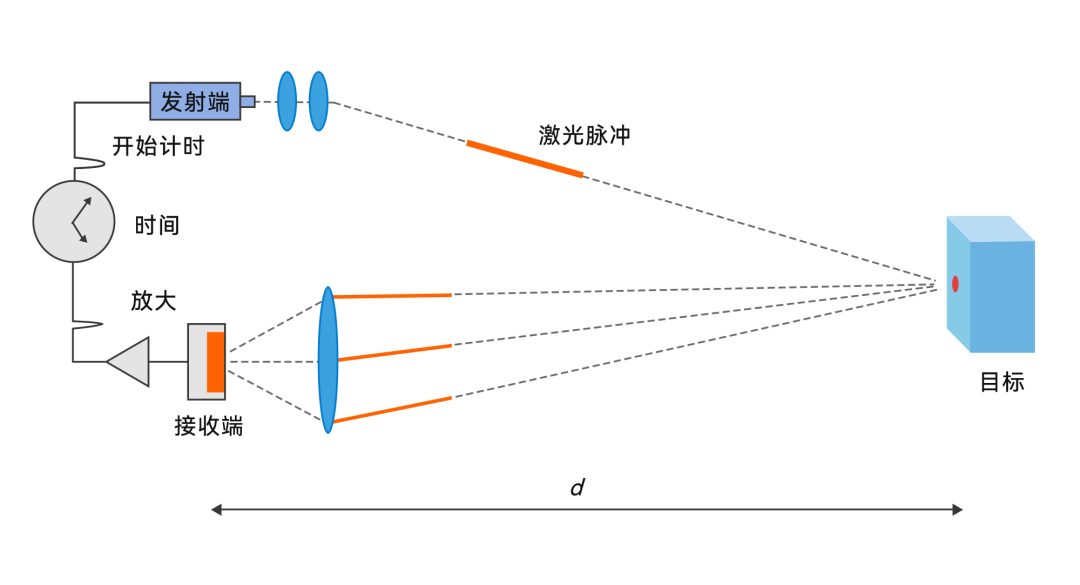
其工作原理是向目標(biāo)發(fā)射一束光脈沖,然后將接收到的從目標(biāo)反射回來的信號(目標(biāo)回波)與發(fā)射信號進(jìn)行比較,接收器準(zhǔn)確地測量光脈沖從發(fā)射到被反射回的傳播時間。通過距離與速度和時間的關(guān)系,作適當(dāng)處理后,就可獲得目標(biāo)的有關(guān)信息,如目標(biāo)距離、方位、高度、速度、姿態(tài)、甚至形狀等參數(shù)。
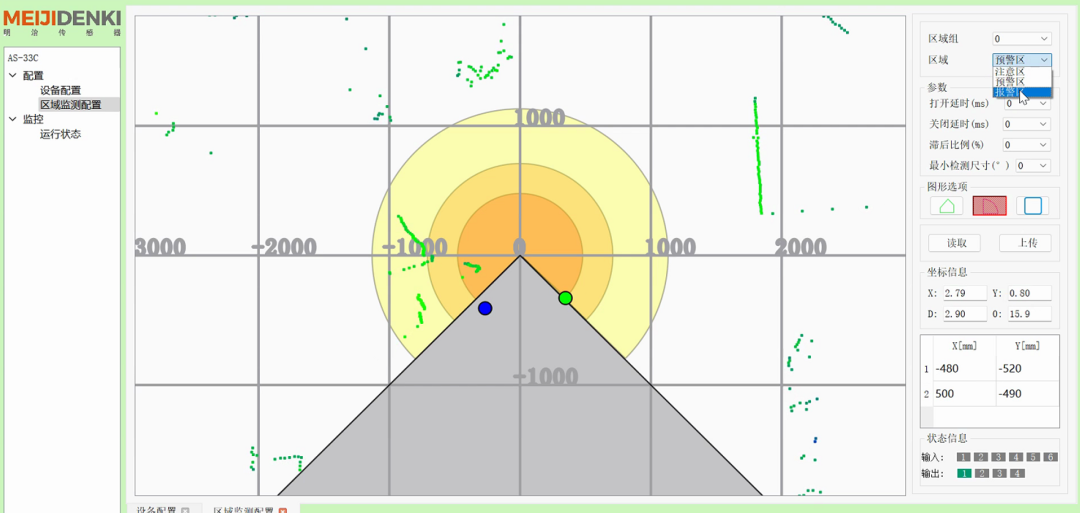
檢測區(qū)域設(shè)置演示
根據(jù)實際應(yīng)用需求在軟件上劃定注意區(qū)、預(yù)警區(qū)以及報警區(qū)域
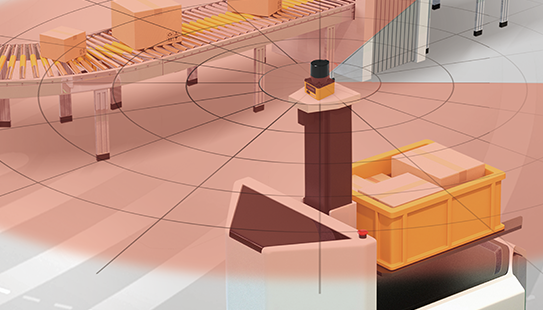
場景效果演示
AGV避障、叉車避障
明治的AS-33C激光雷達(dá)產(chǎn)品是保障AGV安全生產(chǎn)和提高生產(chǎn)效率的核心傳感器,與這一應(yīng)用需求高度契合。
得益于AS-33C較遠(yuǎn)的保護(hù)距離,以及較高的掃描頻率,即使是在快速應(yīng)用中,AS-33C也能有效保護(hù)AGV的行駛安全和周邊設(shè)備、人員安全。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2552文章
51382瀏覽量
755854 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4024瀏覽量
190267
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達(dá)VS毫米波雷達(dá),優(yōu)缺點全知道!
的發(fā)射、反射和接收過程,通過比較發(fā)射信號與接收信號,獲取目標(biāo)的詳細(xì)信息。 毫米波雷達(dá)原理 毫米波雷達(dá)(Millimeter Wave Radar) 利用毫米波頻段的電磁波進(jìn)行探測。其工作原理是發(fā)射電磁波信號,當(dāng)信號遇到障礙物時發(fā)
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)一則消息引爆激光雷達(dá)行業(yè)?上周業(yè)界流傳的一份會議紀(jì)要稱,有自動駕駛專家透露,特斯拉已經(jīng)設(shè)計了自己的激光雷達(dá),并正在與大陸集團(tuán)合作,將自己開發(fā)的
AGV轉(zhuǎn)運機器人需求快速增長,如何進(jìn)行障礙物檢測確保安全?
富唯智能移動機器人通過激光雷達(dá)導(dǎo)航算法,實現(xiàn)自動路徑規(guī)劃,無需軌道、磁條等。當(dāng)路徑中有障礙物時,會重新規(guī)劃路徑避開障礙物。

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)(LiDAR,Light Detection and Ranging)是一種利用激光進(jìn)行距離測量和目標(biāo)識別的技術(shù)。它廣泛應(yīng)用于無人駕駛汽車、地理信息系統(tǒng)(GIS)、環(huán)境監(jiān)測、航空航天等領(lǐng)域
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
信息。這使得激光雷達(dá)在自動駕駛、無人機、機器人等領(lǐng)域具有廣泛的應(yīng)用前景。 二、深度學(xué)習(xí)技術(shù)的發(fā)展 深度學(xué)習(xí)是機器學(xué)習(xí)的一個分支,它通過模擬人腦的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)來處理和分析數(shù)據(jù)。近年來,深度學(xué)習(xí)技術(shù)在圖像識別、語音
激光雷達(dá)在自動駕駛中的應(yīng)用
自動駕駛車輛提供必要的環(huán)境感知能力。 1. 激光雷達(dá)的工作原理 激光雷達(dá)系統(tǒng)通常包括一個激光發(fā)射器、一
物聯(lián)網(wǎng)系統(tǒng)中的自動駕駛的“眼睛”_純固態(tài)激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中為什么要使用純固態(tài)激光雷達(dá) 物聯(lián)網(wǎng)系統(tǒng)中使用純固態(tài)激光雷達(dá)的原因主要基于其獨特的優(yōu)勢和應(yīng)用價值,這些優(yōu)勢使得純固態(tài)激光雷達(dá)在

物聯(lián)網(wǎng)系統(tǒng)中的高精度測距方案_單點TOF激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中為什么要使用單點TOF激光雷達(dá) 物聯(lián)網(wǎng)系統(tǒng)中使用單點TOF(Time of Flight,飛行時間)激光雷達(dá)的原因主要基于其獨特的優(yōu)勢和應(yīng)用場景的需求。以下是詳細(xì)的解釋:

操作技巧 | 明治激光雷達(dá)AS-33C的安裝及使用注意事項
見紅外激光偏轉(zhuǎn)到不同的角度,從而實現(xiàn)對同一水平面270°范圍內(nèi)環(huán)境輪廓的掃描測量。與同類產(chǎn)品相比,AS-33C激光雷達(dá)具有如下特點:①測量距離遠(yuǎn):由于采用脈沖測距原

光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
光學(xué)雷達(dá)和激光雷達(dá)是兩種不同的遙感技術(shù),它們在原理、應(yīng)用、優(yōu)缺點等方面都存在一定的差異。以下是對光學(xué)雷達(dá)和激光雷達(dá)的比較: 定義和原理 光學(xué)
雷達(dá)探測障礙物是超聲波還是次聲波
雷達(dá)探測障礙物主要利用的是 超聲波 ,而不是次聲波。以下是對這一點的介紹: 超聲波的特點 定義 :超聲波是頻率高于人耳聽覺上限(約20000Hz)的聲波。 特點 :超聲波具有定向性好、穿透能力強
自動駕駛汽車如何識別障礙物
自動駕駛汽車識別障礙物是一個復(fù)雜而關(guān)鍵的過程,它依賴于多種傳感器和技術(shù)的協(xié)同工作。這些傳感器主要包括激光雷達(dá)(LiDAR)、雷達(dá)、攝像頭以及
激光雷達(dá)VS毫米波雷達(dá),一文讀懂!
、反射和接收過程,通過比較發(fā)射信號與接收信號,獲取目標(biāo)的詳細(xì)信息。 毫米波雷達(dá)原理 毫米波雷達(dá)(Millimeter Wave Radar) 利用毫米波頻段的電磁波進(jìn)行探測。其工作原理是發(fā)射電磁波信號,當(dāng)信號遇到障礙物時發(fā)生反射

一文看懂激光雷達(dá)
? ? 文章大綱 城市 NOA 成競爭高地,政策助力高階智能駕駛加速落地 成本下探+智駕升級,2030年激光雷達(dá)市場規(guī)模有望超萬億 ? ????·城市 NOA面臨工況復(fù)雜問題,激光雷達(dá)為“優(yōu)選

激光雷達(dá)的應(yīng)用場景
激光雷達(dá)在多個領(lǐng)域中都有著廣泛的應(yīng)用。以下是幾個主要的應(yīng)用場景: 自動駕駛汽車:激光雷達(dá)在自動駕駛汽車中起到了至關(guān)重要的作用。它可以幫助車輛檢測和識別周圍環(huán)境,包括障礙物檢測、定位和導(dǎo)航、車道識別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論