") 【文章轉(zhuǎn)載】應(yīng)用VX實(shí)現(xiàn)加特蘭雷達(dá)原始數(shù)據(jù)采集
【文章轉(zhuǎn)載】應(yīng)用VX實(shí)現(xiàn)加特蘭雷達(dá)原始數(shù)據(jù)采集
01/
挑戰(zhàn)
在快速發(fā)展的汽車自動(dòng)駕駛和駕駛輔助(ADAS)領(lǐng)域,毫米波雷達(dá)因其全天候和出色的測(cè)速測(cè)距表現(xiàn)被廣泛應(yīng)用。加特蘭微電子(Calterah Semiconductor)作為國(guó)內(nèi)CMOS工藝毫米波雷達(dá)芯片開發(fā)與設(shè)計(jì)的領(lǐng)導(dǎo)者,其量產(chǎn)的汽車級(jí)全集成毫米波雷達(dá)SoC芯片,為客戶提供高性能和小型化的選擇。
在雷達(dá)應(yīng)用的開發(fā)前期,采集雷達(dá)的原始數(shù)據(jù)用于算法迭代變得越來越重要。一方面,歷史項(xiàng)目的數(shù)據(jù)需要有效地復(fù)用到新項(xiàng)目中,加速系統(tǒng)的開發(fā)驗(yàn)證;另一方面,出于安全要求的驗(yàn)證需求,高覆蓋率測(cè)試也必不可少。
Vector開發(fā)的新型接口硬件可以適配加特蘭雷達(dá)芯片,可采集來自雷達(dá)單片微波集成電路(Monolithic microwave integrated circuits ,MMIC)的雷達(dá)原始數(shù)據(jù),能同時(shí)滿足實(shí)驗(yàn)室集成和車載路試的環(huán)境要求。
圖1:加特蘭毫米波雷達(dá)芯片
02/
基本原理
2.1 雷達(dá)原始數(shù)據(jù)
雷達(dá)的基本原理是通過疊加發(fā)射和反射的毫米波信號(hào)來計(jì)算提取目標(biāo)的距離、速度和角度信息。
雷達(dá)通常包括天線、MMIC單元(單片微波集成電路)和數(shù)字信號(hào)處理(DSP)單元,其中MMIC負(fù)責(zé)毫米波信號(hào)的調(diào)制、發(fā)射、接收以及回波信號(hào)的解調(diào),接收數(shù)據(jù)為采樣率高達(dá)50MSPS的高速數(shù)字采樣(ADC)原始數(shù)據(jù),然后送到DSP單元做快速傅里葉變換(FFT)得到目標(biāo)等信息。
目前主流的毫米波雷達(dá)都是采用調(diào)頻連續(xù)波(Frequency Modulated Continuous Wave,F(xiàn)MCW)波形,它是一段中心頻率在24GHz(短距探測(cè))或者77GHz(長(zhǎng)距探測(cè))的掃頻連續(xù)波,頻率隨時(shí)間上升或者下降,掃頻帶寬在幾GHz。每隔一定時(shí)間會(huì)空閑一段時(shí)間用于DSP計(jì)算目標(biāo)等信息。這種波形也被稱作啁啾信號(hào)(Chirp Signal)。
通過MMIC采集實(shí)際發(fā)波和回波經(jīng)過混頻器混頻得到的中頻信號(hào)Intermediate Frequency(IF),頻率在幾百M(fèi)Hz,數(shù)字采樣和信號(hào)處理成本較低,這就是雷達(dá)原始數(shù)據(jù)。
2.2 RIF接口(Radar Interface)
在MMIC和DSP之間會(huì)預(yù)留一個(gè)對(duì)外接口用于調(diào)試,這個(gè)接口可以輸出雷達(dá)的原始數(shù)據(jù),并且定義了簡(jiǎn)單的數(shù)據(jù)傳輸協(xié)議,稱為RIF接口(Radar Interface)。RIF接口在物理上通常是2到4對(duì) LVDS通訊,每通道最高900 Mbit/s。
Vector針對(duì)Calterah CAL77 S244-AE開發(fā)了一款緊湊的轉(zhuǎn)接板VX1522.01 GMSL2 POD可接收來自雷達(dá)的原始數(shù)據(jù)。
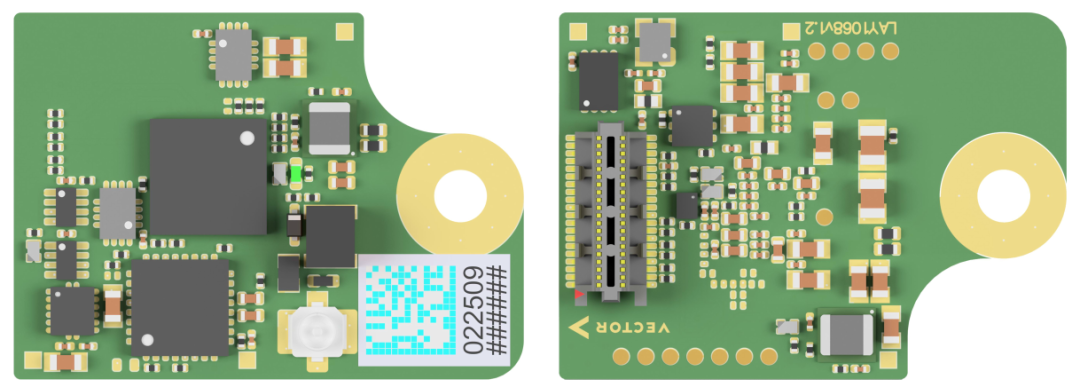
圖2:VX1522.01 GMSL2 POD
2.3串行解串技術(shù)
RIF接口通訊距離和抗干擾能力有限,因此還需要通過POD將信號(hào)串行化再傳輸給接收端。GMSL2是一種傳輸?shù)拇薪獯畢f(xié)議,在攝像頭領(lǐng)域已經(jīng)廣泛應(yīng)用。
VX1522.01 GMSL2 POD選擇將RIF信號(hào)串行化成GMSL2信號(hào),再通過VX1161.51D板卡解串還原數(shù)據(jù)。數(shù)據(jù)采集的上位機(jī)軟件是CANape,可同時(shí)采集其他傳感器和總線信號(hào)。
關(guān)于VX1522.01 GMSL2 POD 和 VX1161.51D板卡更多信息可以查看VX1000官方手冊(cè):www.vector.com/vx1000-manual(可點(diǎn)擊文末閱讀原文鏈接)
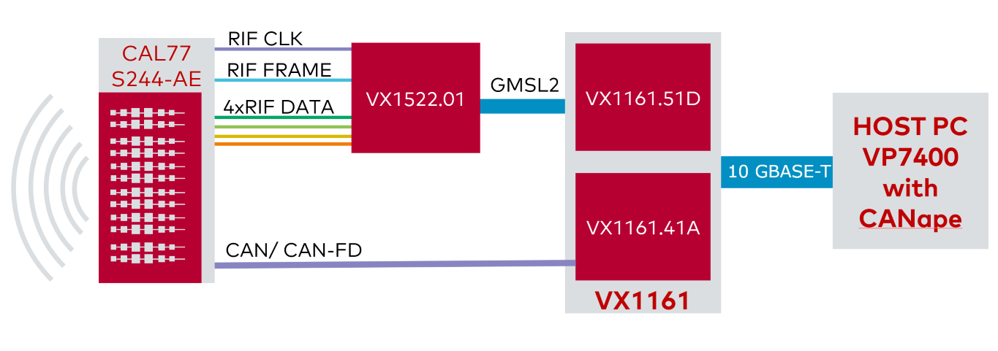
圖3:采集方案
03/
系統(tǒng)配置
VX1161是可靈活配置的多通道數(shù)據(jù)采集接口設(shè)備,根據(jù)被采集對(duì)象的接口選擇不同的板卡。單塊VX1161.51D可同時(shí)采集4路雷達(dá)的原始信號(hào),VX1161.41A/B可采集來自雷達(dá)ECU的CAN總線目標(biāo)信號(hào)。
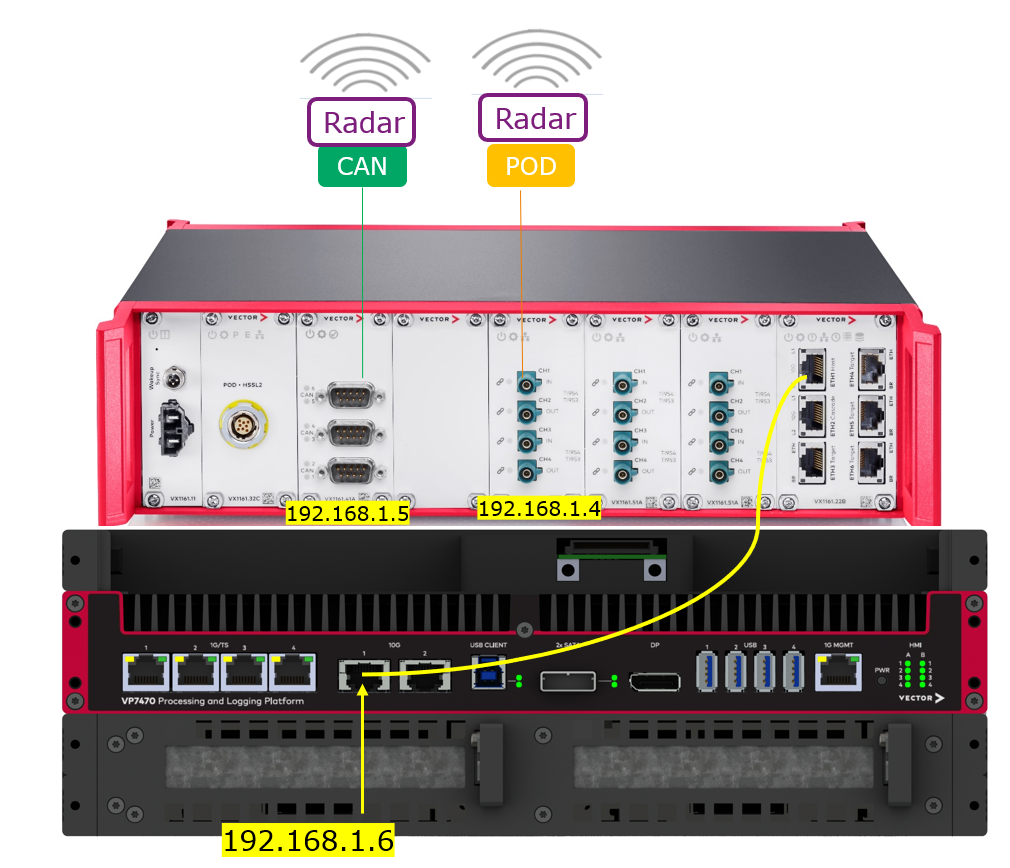
圖4:硬件系統(tǒng)連接
3.1VXconfig配置
在VXConfig配置工具中分別配置VX1161.51D和VX1522.01的接口類型即可。
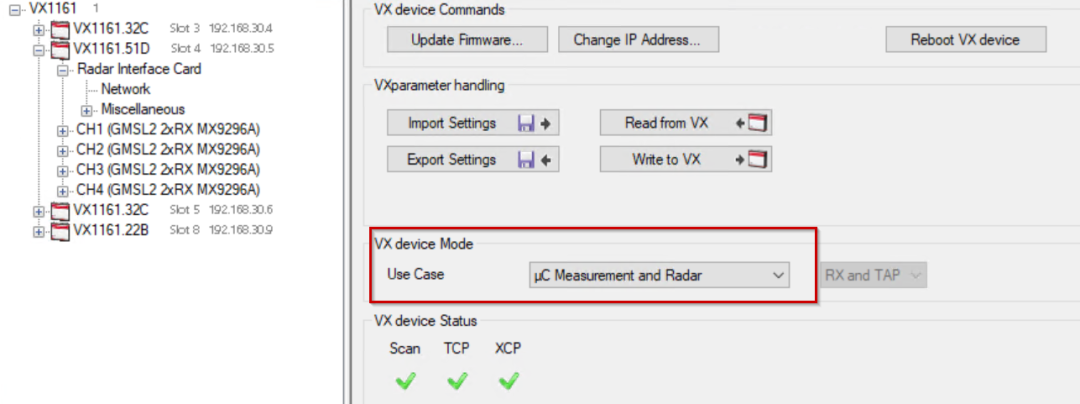
圖5:VX1161.51D 配置
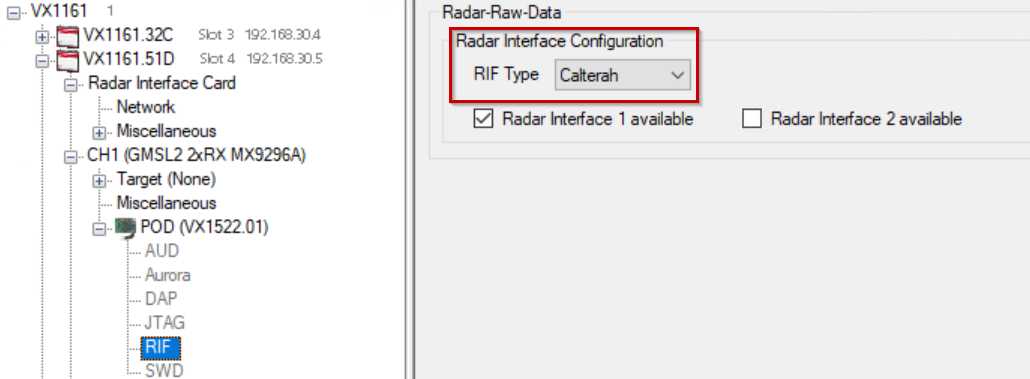
圖6:VX1522.01 POD配置
3.2CANape配置
在CANape中只需要新建一個(gè)雷達(dá)原始數(shù)據(jù)的設(shè)備并關(guān)聯(lián)VX1161.51D采集板卡的IP地址和物理端口即可。
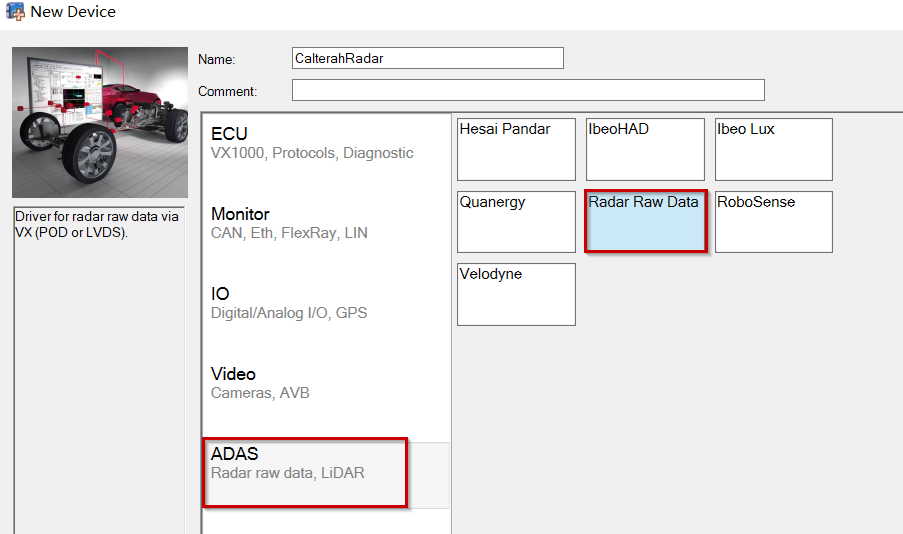
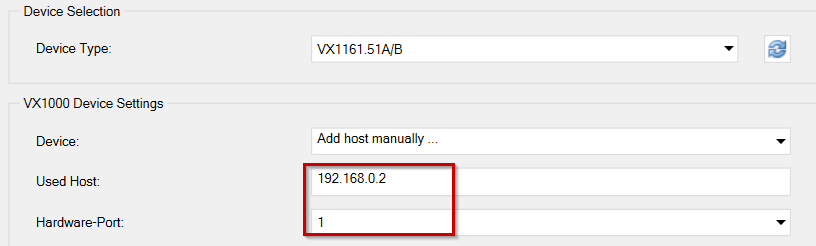
圖7:CANape中Device配置
3.3 CANape在線采集
CANape中創(chuàng)建設(shè)備之后,會(huì)自動(dòng)添加對(duì)應(yīng)的A2L文件,采集RIF1分組下所有信號(hào)即可,其中,RawData信號(hào)為雷達(dá)原始信號(hào);其它信號(hào)用于判斷采集數(shù)據(jù)的正確性和連續(xù)性,Counter代表采集到的Chirps組數(shù),CounterDiff用于判斷Counter是否連續(xù),Status = 0代表采集過程正確。
一個(gè)RawData數(shù)據(jù)塊為一組或一個(gè)周期的Chirps的集合。假設(shè)一個(gè)周期Chirps數(shù)據(jù)包長(zhǎng)度為16Bit/Sample*512個(gè)采樣點(diǎn)*4路*512個(gè)chirp = 2MB,發(fā)送周期為50ms,采集的數(shù)據(jù)帶寬為2MB/50ms = 40MB/S。
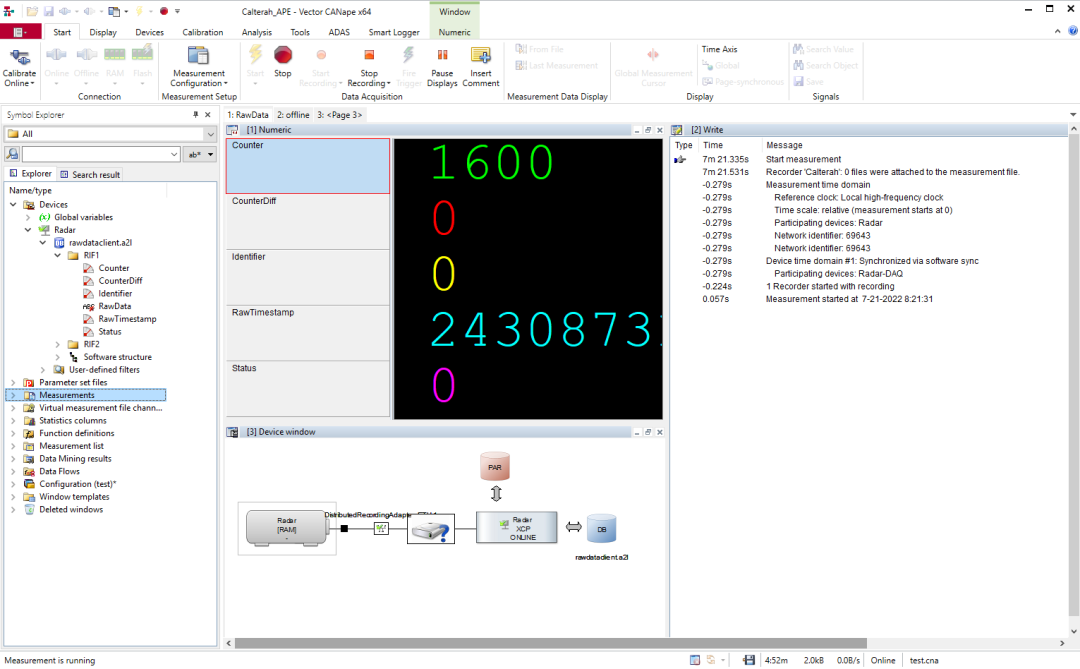
圖8:采集方案CANape在線采集
3.4雷達(dá)原始數(shù)據(jù)離線分析
RawData數(shù)據(jù)塊在CANape中可雙擊打開查看;原始數(shù)據(jù)用于算法迭代時(shí),可通過MDF Lib庫,在其它軟件環(huán)境中加載并解析MDF文件。
關(guān)于MDF Lib的詳細(xì)介紹可參考鏈接:
https://www.vector.com/int/en/products/products-a-z/software/mdf4-lib
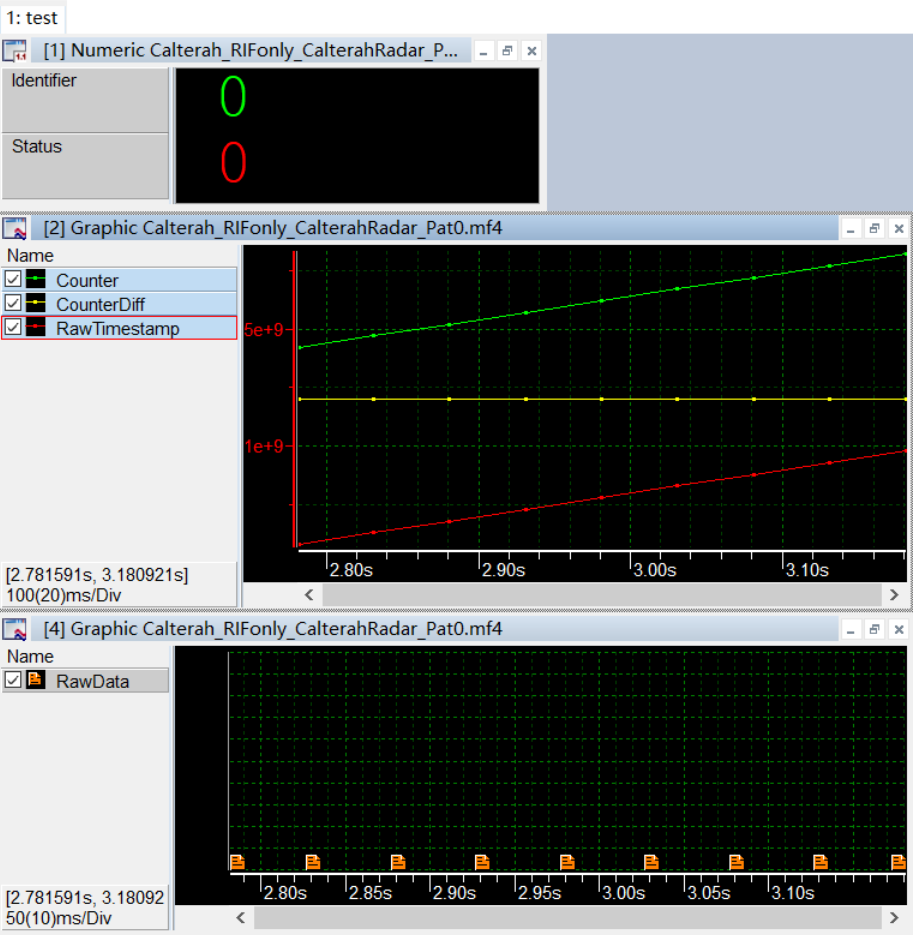
圖9:原始數(shù)據(jù)離線查看
-
adas
+關(guān)注
關(guān)注
309文章
2193瀏覽量
208781 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13923瀏覽量
166821 -
駕駛輔助
+關(guān)注
關(guān)注
0文章
31瀏覽量
10001 -
加特蘭
+關(guān)注
關(guān)注
0文章
44瀏覽量
43
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
加特蘭集成Cadence DSP,升級(jí)汽車成像雷達(dá)解決方案
Cadence與加特蘭攜手提升汽車雷達(dá)系統(tǒng)性能
加特蘭與Cadence合作開發(fā)下一代汽車成像雷達(dá)解決方案
IWR1443和DCA1000EVM采集了原始數(shù)據(jù)后,如何在MATLAB中對(duì)數(shù)據(jù)進(jìn)行后續(xù)處理?
數(shù)據(jù)采集器的工作原理解析 實(shí)時(shí)數(shù)據(jù)采集器的優(yōu)勢(shì)是什么
數(shù)據(jù)網(wǎng)關(guān)與數(shù)據(jù)采集器的區(qū)別
TVP5146和TVP5150A VBI原始數(shù)據(jù)模式

使用低速串行總線的實(shí)時(shí)ADC原始數(shù)據(jù)采集方法
加特蘭完成數(shù)億元D輪融資,專注CMOS毫米波雷達(dá)芯片設(shè)計(jì)
加特蘭發(fā)布全新毫米波雷達(dá)芯片平臺(tái),加速全球汽車智能化
加特蘭毫米波雷達(dá)SoC家族再進(jìn)化,為全球市場(chǎng)提供高性能雷達(dá)解決方案

2024加特蘭日 |加特蘭毫米波雷達(dá)新方案驚艷亮相,以創(chuàng)新技術(shù)加速毫米波雷達(dá)普及






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論