 開發者說 | 地平線程序員奶爸帶你玩轉機器人開發平臺 —— 第二期 人體跟隨
開發者說 | 地平線程序員奶爸帶你玩轉機器人開發平臺 —— 第二期 人體跟隨
在AI操控機器人系列第一期的手勢控制教程中,身為地平線資深程序員的奶爸,使用地平線發布的機器人開發平臺TogetherROS軟件棧,搭建了手勢操控機器人。
當孩子的小伙伴們還是帶個手套或者使用遙控器指揮機器人跑跑時,手勢控制這么AI的機器人讓小朋友得意了很長一段時間。(點擊一下,內容回顧)
可是好景不長,小朋友對待玩具都是喜新厭舊的,這就給我提了新的需求,小小年紀就展現了當產品經理的潛力。
“能不能讓機器人跟在我后面跑,就像咱們家狗狗那樣呢?”
為了體現老爸的厲害,這個人體跟隨機器人必須搞起(其實是機器人開發平臺里面豐富的算法讓我這么有底氣)。
一、功能介紹
大家先看一下最終實現的功能。
從跟隨效果來看,當人移動時,機器人能夠迅速跟隨人移動,得益于地平線旭日??X3派(以下簡稱X3派)上5Tops算力的BPU可以實現低延遲(30ms左右)、高幀率(滿幀30fps)、遠距離(>8m)、低系統負載(4核CPU只占用了單核<40%)的算法推理能力。
開始碼代碼前,先來簡單分析一下人體跟隨機器人需要具備哪些基本模塊。
傳感
對于人體跟隨這類基于視覺的AI算法應用,首先需要有視覺傳感器來捕捉圖像數據。
感知
獲取到傳感器發布的圖像后,通過視覺算法進行推理,檢測到人體,實現感知的能力。
交互
檢測到人體之后,需要定義并實現對應不同人體檢測結果的功能應用,如人體在機器人的右邊需要控制機器人向右轉動。
控制
根據“交互”模塊輸出的控制指令,實現對機器人的機械控制。
機器人本體
當然還需要一個具備運動能力的機器人本體,接收控制指令并控制電機運動,實現最終的機器人跟隨人體的效果。
地平線發布的機器人平臺TogetherROS軟件棧內置了豐富易用的機器人開發組件,包含搭建一個智能機器人應用(如人體跟隨機器人和第一期的機器人手勢控制)所涉及到的所有功能模塊,完全開源免費,并允許開發者二次開發,接下來開始搞起。
二、準備工作
準備搭建機器人人體跟隨應用案例的硬件設備和軟件包。
硬件
硬件包括:
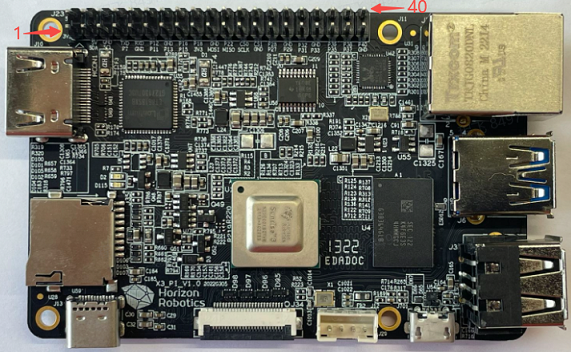
①X3派
②F37 MIPI攝像頭

③機器人

X3派和TogetherROS適配了本末雙足機器人和小R科技的麥輪小車。這邊為了讓孩子覺得機器人足夠高大上,就用本末的輪足機器人來介紹,沒有的同學也不用擔心,文章后面會介紹自己搭建機器人的方式。
④其他配件
a.USB Type C接口電源線。至少搭配5V@2A適配器,用于X3派供電。
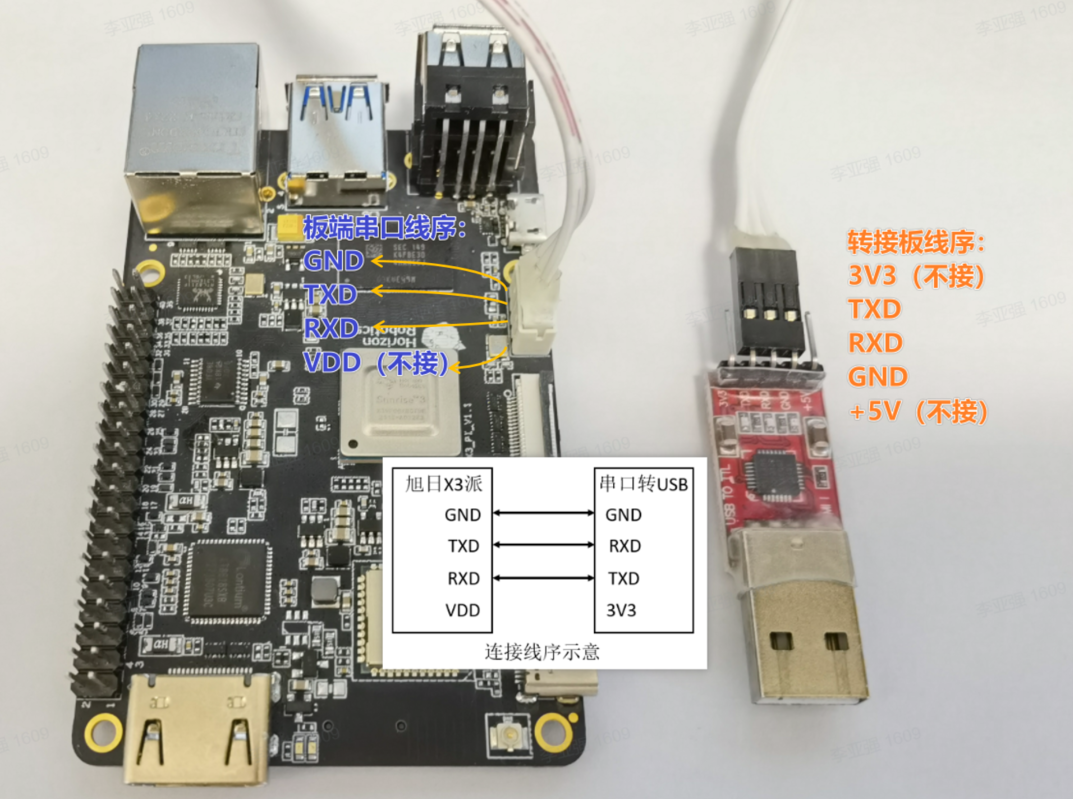
b.串口線,連接方式如下:
c.TF存儲卡和讀卡器。旭日X3派開發板采用TF存儲卡作為系統啟動介質,推薦使用至少8GB容量、速率C10以上的TF存儲卡,以便滿足Ubuntu系統及更多應用功能包對存儲空間的需求。
安裝系統
參考旭日X3派的用戶手冊的安裝系統章節,安裝完成(或者已經安裝過)需要更新系統。
系統配置
配置X3派的無線網絡,參考X3派的用戶手冊的無線網絡章節。
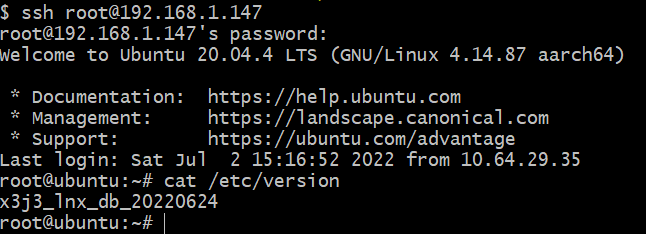
無線網絡配置成功之后,查詢IP地址:
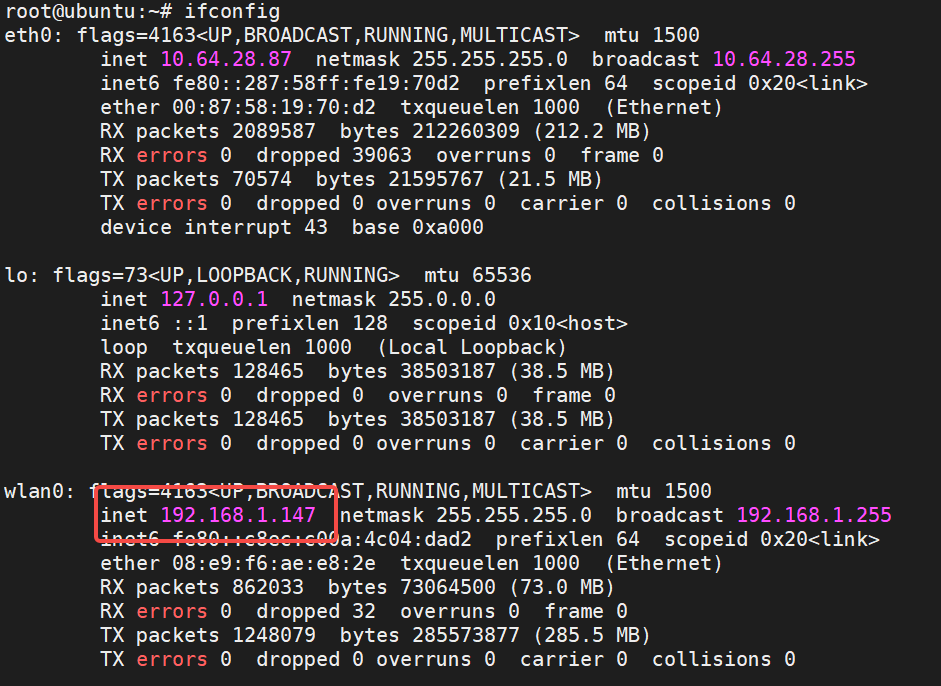
可以看到,X3派的無線網路分配的IP地址為192.168.1.147,下面開始使用這個地址和root賬號(密碼為root)通過ssh遠程連接到X3派,登錄成功后的狀態如下:
安裝TogetherROS
使用apt命令通過DEB包安裝TogetherROS。
登錄旭日X3派ssh root@192.168.1.147,執行命令sudo apt install hhp,安裝過程如下:
root@ubuntu:~# sudo apt install hhp Reading package lists... Done Building dependency tree Reading state information... Done The following NEW packages will be installed: hhp0 upgraded, 1 newly installed, 0 to remove and 52 not upgraded. Need to get 384 MB of archives. After this operation, 512 MB of additional disk space will be used. Get:1 http://42.62.85.28/ubuntu-ports focal/main arm64 hhp arm64 1.0.1 [384 MB] Fetched 384 MB in 6min 43s (954 kB/s) Selecting previously unselected package hhp.(Reading database ... 110406 files and directories currently installed.) Preparing to unpack .../archives/hhp_1.0.1_arm64.deb ... Unpacking hhp (1.0.1) ... Setting up hhp (1.0.1) ... Generating locales (this might take a while)... en_US.ISO-8859-1... done en_US.UTF-8... done Generation complete.
查看/opt目錄下文件:
root@ubuntu:/userdata# ls /opt/ tros
可以看到TogetherROS已安裝在/opt目錄下,說明安裝成功。至此,準備工作結束,下面開始使用這些硬件設備和軟件包搭建機器人人體跟隨App。
三、使用介紹
接下來開始搞各個功能模塊,再一步步組裝起來,分別驗證其功能。
安裝和測試F37攝像頭
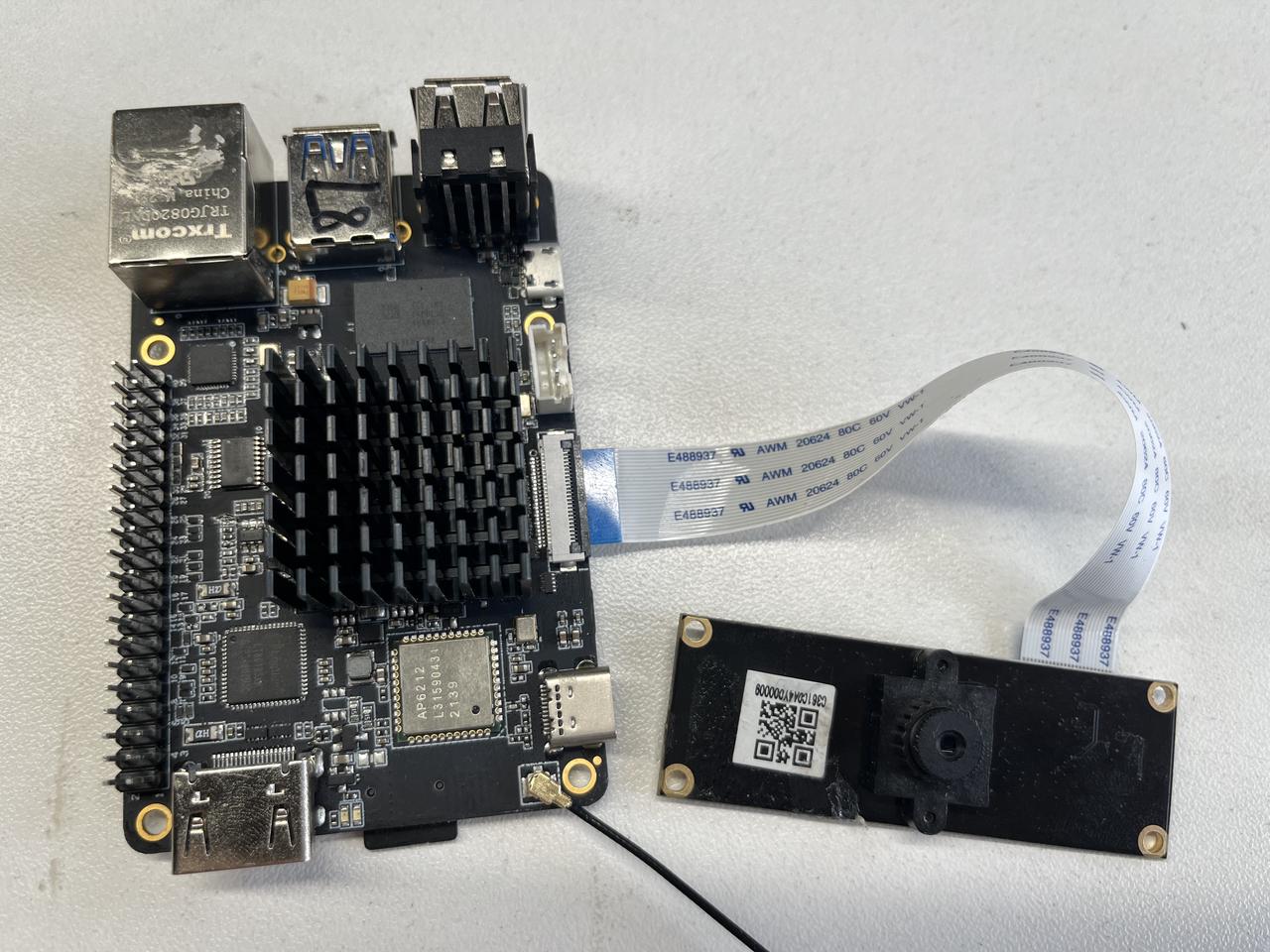
將F37攝像頭通過MIPI線連接到X3派上,連接方式如下:
直接使用TogetherROS中的ROS package測試F37的功能。以下通過腳本啟動攝像頭采集,圖像編碼,web展示功能包,實現將F37攝像頭采集到的圖像進行編碼后,通過PC端web瀏覽器實時查看采集到的圖像。 登錄旭日X3派ssh root@192.168.1.147后,在終端(以下默認終端都是通過ssh登錄)中輸入以下命令啟動:
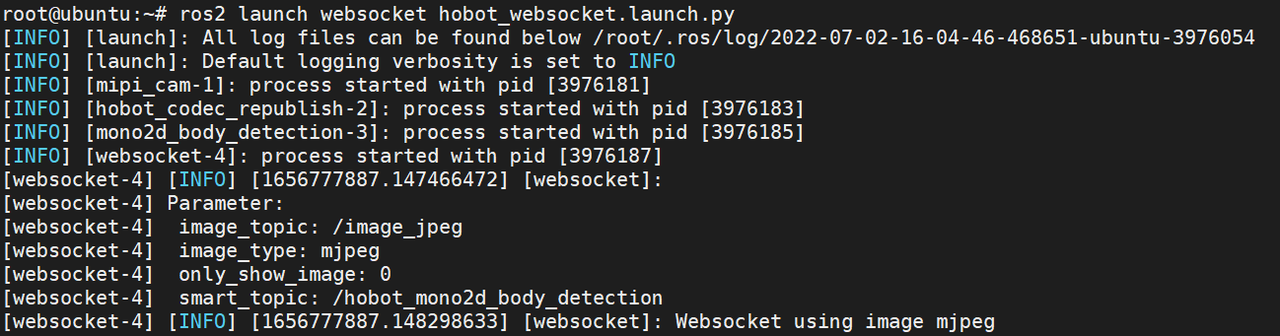
# 配置 TogetherROS 環境: source /opt/tros/local_setup.bash # 啟動腳本 ros2 launch websocket hobot_websocket.launch.py
啟動成功的終端狀態如下:
攝像頭開始采集圖像并對外發布圖像消息。PC瀏覽器(chrome/firefox/edge)輸入X3派IP地址,即可查看F37實時采集到的圖像效果:
說明F37攝像頭已安裝成功并能夠對外發布圖像消息。
測試人體檢測算法和交互功能
X3派上打開一個終端,啟動人體檢測和控制的腳本:
# 配置TogetherROS環境 source /opt/tros/setup.bash # 從TogetherROS的安裝路徑中拷貝出運行示例需要的配置文件。 cp -r /opt/tros/lib/mono2d_body_detection/config/ . #啟動launch文件 ros2 launch body_tracking hobot_body_tracking_without_gesture.launch.py
啟動成功后,當有人體出現在F37攝像頭前時,終端輸出如下信息:
[body_tracking-5] [INFO] [1657615485.941625685] [TrackingManager]: track_id: 1, frame_ts: 485910, tracking_sta(0:INITING, 1:TRACKING, 2:LOST): 1, gesture: 0, y pixel to robot: 2, present_rect: 540 6 954 542 [body_tracking-5] [INFO] [1657615485.941724902] [TrackingManager]: UpdateTrackAngle: frame_ts: 485910, track_id: 1, angel_with_robot: 45 [body_tracking-5] [INFO] [1657615485.942362166] [TrackingManager]: rotate direction: 0, step: 0.500000 [body_tracking-5] [WARN] [1657615485.942528139] [RobotCmdVelNode]: RobotCtl, angular: 0 0 -0.5, linear: 0 0 0, pub twist ts: 1657615485942515
以上log顯示機器人在跟隨目標編號為1(track_id: 1)的人體(tracking_sta: 1),人體不在機器人的正前方,和機器人之間的角度為45度,跟隨交互模塊控制機器人以0.5r/s的速度向人體方向轉動(rotate direction: 0, step: 0.500000)。 在PC端瀏覽器上會實時渲染顯示攝像頭采集到的圖像,人體、人頭、人臉和人手檢測框和目標編號結果,人體骨骼關鍵點以及實時的性能統計數據,如下圖:
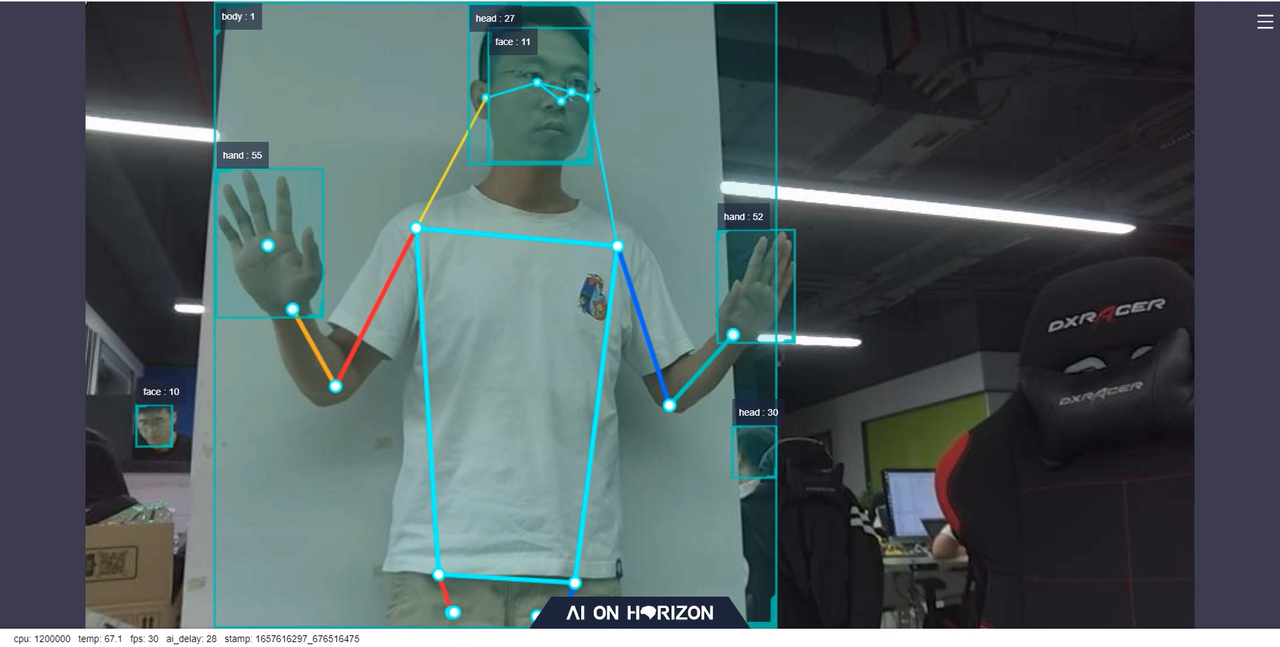
其中瀏覽器下方顯示的fps為實時的AI推理輸出的幀率,和F37攝像頭采集圖像的幀率30fps一致。ai_delay(單位為毫秒)為28,表示的是單幀推理的延遲,從傳感Node發布圖像數據開始,經過感知算法Node推理后,發布包含人體檢測結果的AI msg的耗時。 板端使用top命令查看系統資源占用如下圖所示,其中mono2d_body_detection為人體檢測算法推理進程,此時CPU使用率為38.9%。

經過以上測試,說明在X3派上,TogetherROS的人體檢測算法運行成功,并且算法可以實現低延遲(30ms)、高幀率(滿幀30fps)、遠距離(>8m)、低系統負載(單核CPU占用<40%)的算法推理效果,體現了X3 BPU強大的算力。
人體檢測算法測試完成后,接著測試人體跟隨功能。X3派上另起一個終端,執行如下命令查詢X3派上的話題列表:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic list
輸出如下:
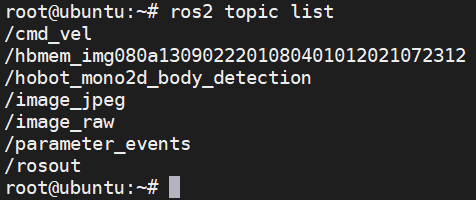
其中/cmd_vel話題是人體跟隨控制節點發布的控制命令消息。在當前終端執行ros2 topic echo /cmd_vel命令查詢X3派上的話題信息,當人體出現在F37攝像頭前并且偏離正前方時,終端輸出如下:
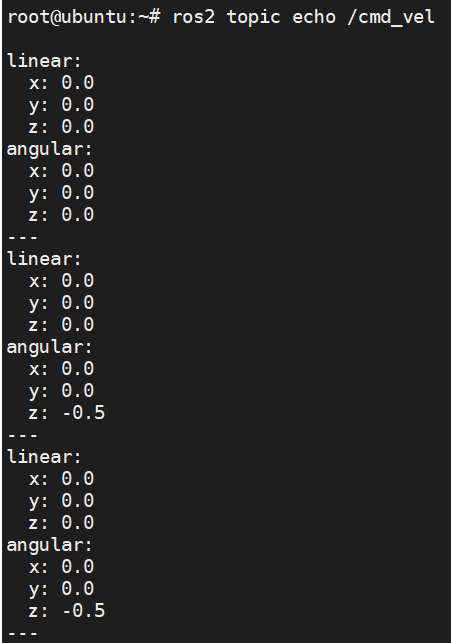
可以看到,此時人體跟隨控制節點發布發布出的/cmd_vel話題的angular z數據為-0.5,表示以0.5r/s的速度轉動。 說明人體識別算法和交互功能的軟件包已安裝成功,并能夠通過/cmd_vel話題對外發布機器人運動控制消息。
將X3派安裝到機器人上
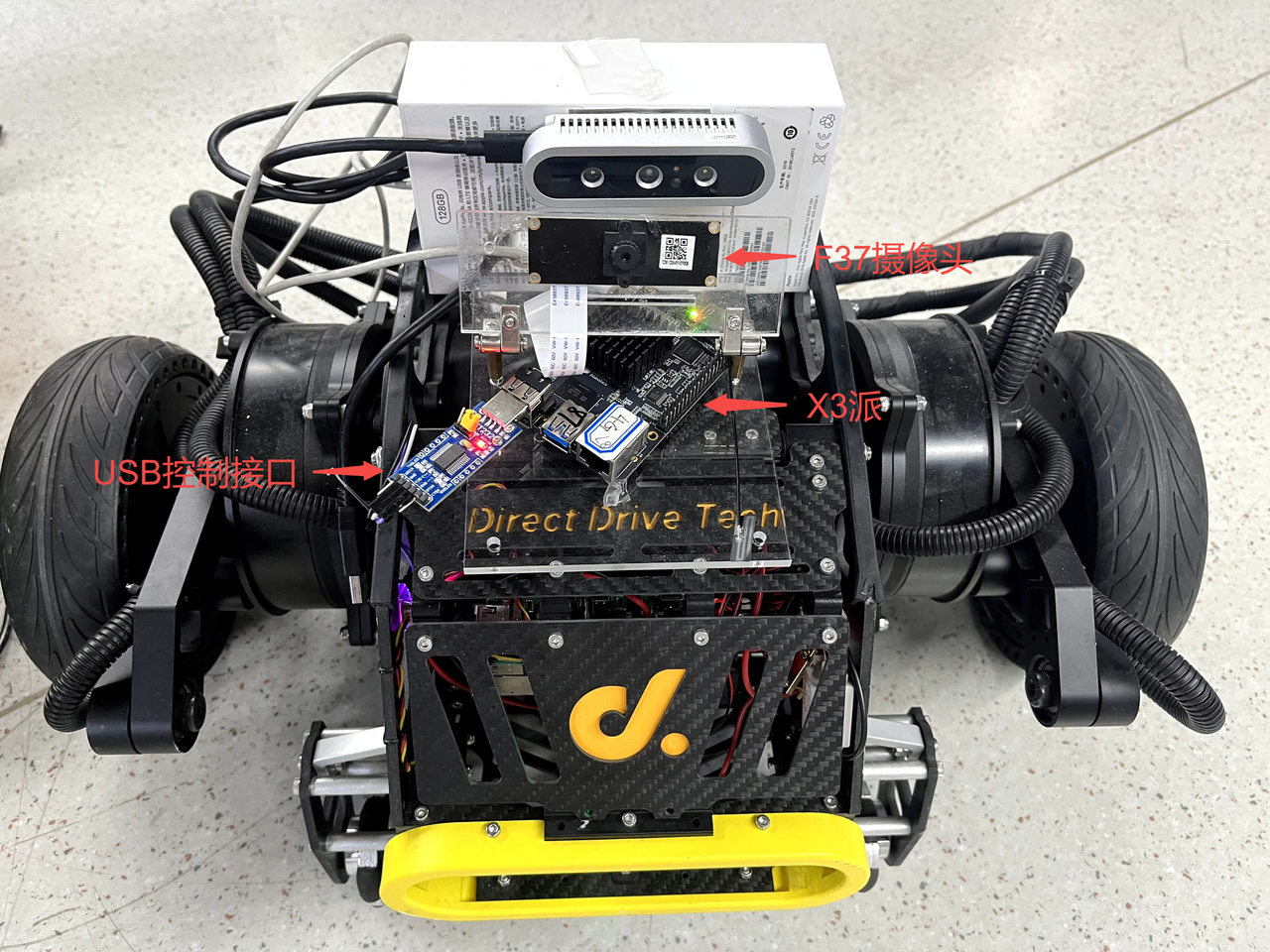
將X3派安裝到機器人上,并測試在X3派上通過發布/cmd_vel話題控制機器人運動的功能。連接了F37攝像頭的X3派直接固定在機器人上,并將機器人的USB控制接口插到X3派上。 安裝效果如下:
對于支持使用ROS開發的機器人,一般會提供一個基于ROS開發的機器人運動控制Node,功能為訂閱/cmd_vel話題的控制消息(ROS2中定義的用于機器人控制的消息,消息類型為geometry_msgs/msg/Twist),根據控制協議,通過USB等接口向機器人發送運動控制指令,實現控制機器人運動的目的。
本文使用的本末雙足機器人使用的是USB接口,并提供了運行在X3派上的運動控制package,package訂閱到/cmd_vel話題的控制消息后,通過USB向機器人下發控制指令,實現對機器人的控制。 在X3派上啟動本末雙足機器人運行控制Node。打開一個終端,執行如下命令:
# 配置TogetherROS環境 source /opt/tros/setup.bash #啟動本末機器人運動控制package ros2 run diablo_sdk ros_bridge_example
執行成功后終端中輸出如下信息:
X3派上重新打開一個終端,通過發布/cmd_vel話題消息控制機器人以0.3r/s的速度轉動:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.3}}'
執行成功后終端中輸出如下信息:

機器人收到控制指令后轉動的效果如下:
說明機器人能夠按照發布的控制命令消息正確的實現運動。
對于其他機器人應該怎么安裝
如果手里是其他的移動機器人,例如有一個使用樹莓派或者Jetson Nano作為上位機的機器人,也可以將X3派安裝在機器人上,代替樹莓派或者Jetson Nano,實現控制機器人運動。 安裝方法如下:
①編譯可以運行在X3派上的運動控制package;
a.X3派上安裝ROS2軟件系統構建和編譯工具:
apt update apt-get install python3-catkin-pkg pip3 install empy pip3 install -U colcon-common-extensions
b.將原先運行在樹莓派或者Jetson Nano上的機器人運動控制ROS2 package源碼拷貝到X3派上;
c.在X3派上,package源碼工程所在路徑下,直接使用source /opt/tros/setup.bash; colcon build命令編譯package;
d.如果原先運動控制package是基于ROS1開發,源碼需要適配到ROS2。只需要適配"cmd_vel"話題消息的訂閱和處理,如果原先的ROS1 package中有其他功能,可以先不關注。
②安裝
a.將X3派固定在機器人上,如果空間有限,可以將原先的樹莓派或者Jetson Nano拆除;
b.使用USB Type C給X3派供電,如果機器人上無Type C供電輸出,也可以使用移動電源(輸出至少5V&直流 2A)給X3派供電;
c.將機器人的USB控制接口插到X3派上。
③測試
a.X3派上啟動新編譯的機器人運動控制package;
b.X3派上重新打開一個終端,通過發布/cmd_vel話題消息控制機器人以0.3r/s的速度轉動:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.3}}'
如果機器人正常轉動,說明X3派安裝成功。
四、完整的機器人人體跟隨效果
下面開始測試完整的機器人人體跟隨功能。
X3派上打開一個終端,啟動人體檢測和控制腳本
# 配置TogetherROS環境 source /opt/tros/setup.bash # 從TogetherROS的安裝路徑中拷貝出運行示例需要的配置文件。 cp -r /opt/tros/lib/mono2d_body_detection/config/ . #啟動launch文件 ros2 launch body_tracking hobot_body_tracking_without_gesture.launch.py
X3派上打開一個終端,啟動機器人運動控制Node
# 配置TogetherROS環境 source /opt/tros/setup.bash #啟動本末機器人運動控制Node ros2 run diablo_sdk ros_bridge_example
機器人跟隨人移動
五、原理分析
第4章節中,在X3派的兩個終端中分別啟動了hobot_body_tracking_without_gesture.launch.py腳本和運動控制Node,實現了機器人跟隨人體的效果,本章節對實現的原理進行分析。
App運行時的Node和Topic信息
對于一個基于ROS開發的App,首先會想到這個App在運行時有哪些Node,這些Node發布和訂閱了哪些Topic,以及這些Node之間的關聯。
在X3派上使用ros2的命令行工具查詢設備上運行的Node和Topic信息:
root@ubuntu:~# source /opt/tros/setup.bash root@ubuntu:~# ros2 node list /ai_msg_sub_node /hobot_codec1658324595406906403 /horizon_tracking_RobotCmdVel /mipi_cam /mono2d_body_det /ros_bridge_example /tracking_strategy_parameter_node /transform_listener_impl_5594bf54a0 /websocket root@ubuntu:~# ros2 topic list /cmd_vel /hbmem_img080a1309022201080401012021072312 /hobot_mono2d_body_detection /image_jpeg /image_raw /imu/data_raw /odom /parameter_events /quat_odom /raw_odom /rosout /tf /tf_static
查詢到X3派上運行著多個Node,這些ROS2 Node之間是基于pub&sub機制通信,通過topic將這些Node串聯起來形成一個pipeline。
此App運行時Node以及Topic信息比較多,看不出Node之間的關聯。可以在PC端通過rqt(PC端需要安裝ROS2 Foxy版本,rqt,以及PC需要和X3派處于同一網段)的Node Graph功能可以可視化的展示X3派上運行的Node,Node發布和訂閱的topic,以及Node之間的連接關系,如下圖(其中橢圓形框內為Node名,矩形框內為topic名):

可以看到,整個graph(pipeline)以mipi_cam Node(圖像采集和發布)為起點,websocket Node(序列化圖片和AI結果,用于可視化展示)和ros_bridge_example Node(機器人運動控制)為終點,起點和終點之間連接著多個Node。這些Node中ros_bridge_example Node是通過ros2 run diablo_sdk ros_bridge_example命令啟動,其余Node都是通過hobot_body_tracking_without_gesture.launch.py腳本啟動。
注意:/ai_msg_sub_node節點訂閱到的/hobot_mono2d_body_detection話題消息實際是由/horizon_tracking_RobotCmdVel節點處理,導致顯示的graph不連續,屬于設計上的待完善點
App的Node介紹
對于復雜的包含多個Node的應用,ROS2提供了使用啟動腳本通過launch批量啟動Node的功能。
機器人跟隨人體App使用hobot_body_tracking_without_gesture.launch.py腳本來啟動這些Node,腳本內容如下:
import os from launch import LaunchDescription from launch_ros.actions import Node from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from ament_index_python import get_package_share_directory def generate_launch_description(): web_service_launch_include = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join( get_package_share_directory('websocket'), 'launch/hobot_websocket_service.launch.py')) ) return LaunchDescription([ web_service_launch_include, # 啟動圖片發布pkg Node( package='mipi_cam', executable='mipi_cam', output='screen', parameters=[ {"out_format": "nv12"}, {"image_width": 960}, {"image_height": 544}, {"io_method": "shared_mem"}, {"video_device": "F37"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動jpeg圖片編碼&發布pkg Node( package='hobot_codec', executable='hobot_codec_republish', output='screen', parameters=[ {"channel": 1}, {"in_mode": "shared_mem"}, {"in_format": "nv12"}, {"out_mode": "ros"}, {"out_format": "jpeg"}, {"sub_topic": "/hbmem_img"}, {"pub_topic": "/image_jpeg"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動單目rgb人體、人頭、人臉、人手框和人體關鍵點檢測pkg Node( package='mono2d_body_detection', executable='mono2d_body_detection', output='screen', parameters=[ {"ai_msg_pub_topic_name": "/hobot_mono2d_body_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動web展示pkg Node( package='websocket', executable='websocket', output='screen', parameters=[ {"image_topic": "/image_jpeg"}, {"image_type": "mjpeg"}, {"smart_topic": "/hobot_mono2d_body_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動人體跟隨pkg Node( package='body_tracking', executable='body_tracking', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_mono2d_body_detection"}, {"activate_wakeup_gesture": 0}, {"img_width": 960}, {"img_height": 544}, {"track_serial_lost_num_thr": 30}, {"move_step": 0.5}, {"rotate_step": 0.5}, {"activate_robot_move_thr": 5} ], arguments=['--ros-args', '--log-level', 'info'] ) ])
腳本中指定了多個Node,其中每個Node中的package配置項表示Node名,可以看到腳本中配置的Node名和5.1章節中查出來的一致。
在第1章節,分析了機器人人體跟隨App所需要具備的功能模塊,下面按照這些功能模塊對Node進行分析。
傳感
使用了TogetherROS中的Hobot Sensor組件中的mipi_cam Node,同時指定了Node的參數:
"out_format":發布圖片的格式為"nv12"
"image_width":圖片分辨率寬為960
"image_height":圖片分辨率高為544
"io_method":發布出來的圖片傳輸方式為"shared_mem",即共享內存方式,對應消息的topic為"hbmem_img"
"video_device":指定了使用的MIPI攝像頭類型為"F37",表示F37攝像頭
參數指定了使用F37攝像頭,發布的圖片格式和分辨率可以直接用于算法推理,其中通過共享內存方式發布圖片,可以極大地降低系統負載和傳輸延遲。
感知
使用了TogetherROS中的Boxs算法倉庫中的人體檢測和跟蹤算法,訂閱Hobot Sensor(mipi_cam Node)發布的圖像消息,利用BPU處理器進行AI推理,發布包含人體、人頭、人臉、人手框和人體骨骼關鍵點檢測結果的AI msg,并通過多目標跟蹤(multi-target tracking,即MOT)功能,實現檢測框的跟蹤和目標編號分配。
Node對應package名為'mono2d_body_detection',同時指定了Node的參數:
"ai_msg_pub_topic_name":發布包含人體檢測框信息的AI感知結果的topic名為"/hobot_mono2d_body_detection"
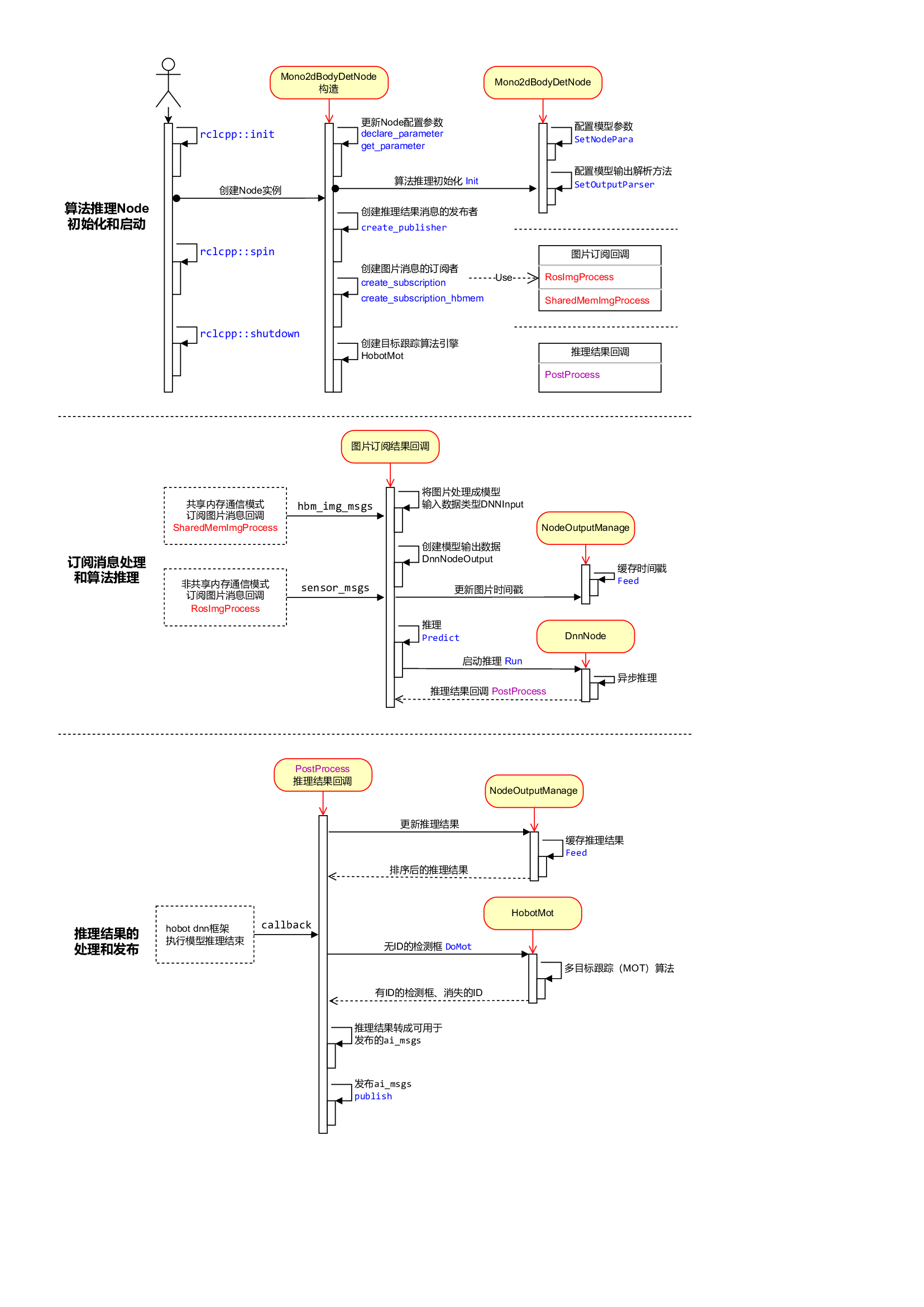
人體檢測和跟蹤算法推理Node(Mono2dBodyDetNode)主要包含三部分邏輯獨立的功能:
Node初始化和啟動
配置算法使用的模型信息,創建消息的發布者和訂閱者,啟動目標跟蹤算法引擎;
訂閱消息和算法推理
在注冊的圖像消息回調中,處理圖像數據并用于算法模型推理,回調中不等待算法推理完成;
推理結果的處理和發布
算法推理完成后,通過注冊的回調PostProcess輸出推理結果,回調中對檢測結果按照時間順序排序(NodeOutputManage)以及進行多目標跟蹤算法(HobotMot)處理后,發布算法推理結果消息。
Node的設計和流程邏輯如下圖:
交互
人體跟隨策略Node訂閱人體檢測和跟蹤算法發布的包含人體信息的AI msg,根據人體框和機器人的位置關系,發布前進、后退、左轉、右轉的控制消息,實現控制機器人運動。 Node發布的運動控制消息為ROS2中定義的消息,topic為“/cmd_vel”,消息類型為“geometry_msgs/msg/Twist”,Node對應package名為'body_tracking',同時指定了Node的參數:
"ai_msg_sub_topic_name": 訂閱包含人體檢測信息的topic名為"/hobot_mono2d_body_detection"
"activate_wakeup_gesture": 喚醒手勢開關,值為0表示不啟用喚醒手勢。一般在人較多,環境復雜的場景,通過啟用喚醒手勢避免誤觸發人體跟隨功能。
"img_width": 人體檢測模型輸入圖片像素的寬
"img_height": 人體檢測模型輸入圖片像素的高
"track_serial_lost_num_thr": 人體連續消失幀數閾值,值為30,表示當跟隨的人體連續消失30幀之后會重新選擇跟隨的人體
"move_step": 平移運動的步長(速度),0.5表示移動速度為0.5m/s,值越大速度越快
"rotate_step": 旋轉運動的步長(速度),0.5表示旋轉速度為0.5r/s,值越大速度越快
"activate_robot_move_thr": 激活機器人移動的閾值,單位為像素。當人體檢測框的y像素值小于閾值(具體畫面的上邊界)時,激活機器人移動。
人體跟隨策略選擇第一次出現的人體作為跟隨人體,如果有多個人體同時出現,選擇最大寬度的人體檢測框作為跟隨人體;已有跟隨人的情況下,其他的人體檢測結果都無效。 Node輸出的log中tracking_sta關鍵字表示跟隨的狀態,0表示未找到跟隨人,1表示已有跟隨人,2表示跟隨人消失。Node啟動后,未找到跟隨人的情況下,輸出log中tracking_sta值為0;當有跟隨人時,輸出log中tracking_sta值為1,同時通過track_id關鍵字輸出跟隨人的編號;只有當跟隨人消失,即連續track_serial_lost_num_thr幀(配置為30幀,對于輸出頻率為30fps的F37攝像頭,為1秒)未檢測到跟隨人,判斷跟隨人消失,開始重新選擇跟隨人,跟隨人消失時輸出log中tracking_sta值為2。
如果需要啟用喚醒手勢避免誤觸發,喚醒手勢使用方法詳見人體跟隨策略的代碼倉庫。
控制
機器人運動控制Node訂閱人體跟隨策略Node發布的topic為“/cmd_vel”的控制消息,根據控制協議,通過USB總線向機器人下位機發布運動控制指令。對于不同類型的機器人,控制協議不同,對應于不同的運動控制Node。本文使用的是本末雙足機器人,對應的運動控制Node啟動方法為ros2 run diablo_sdk ros_bridge_example。此Node單獨啟動,不在啟動腳本中。
App的系統設計
根據5.1和5.2章節的介紹,已經知道了機器人人體跟隨App啟動了哪些Node,這些Node的功能,Node之間的關系,以及使用這些Node如何實現通過人體跟隨機器人的目標。下面進行理論總結,介紹此App的系統設計。對于一個復雜的機器人系統,一般在機器人上配置上位機和下位機兩種處理器,機器人上位機的計算能力較強,執行復雜的機器人上層應用,同時能夠最大程度屏蔽不同類型機器人的底層差異;機器人下位機一般使用低成本的MCU處理器,對機器人本體上的各類傳感器和硬件進行數據采集/控制。
人體跟隨App由兩部分組成,分別為機器人和PC端,其中機器人部分又分為上位機和下位機。詳細組成如下圖:
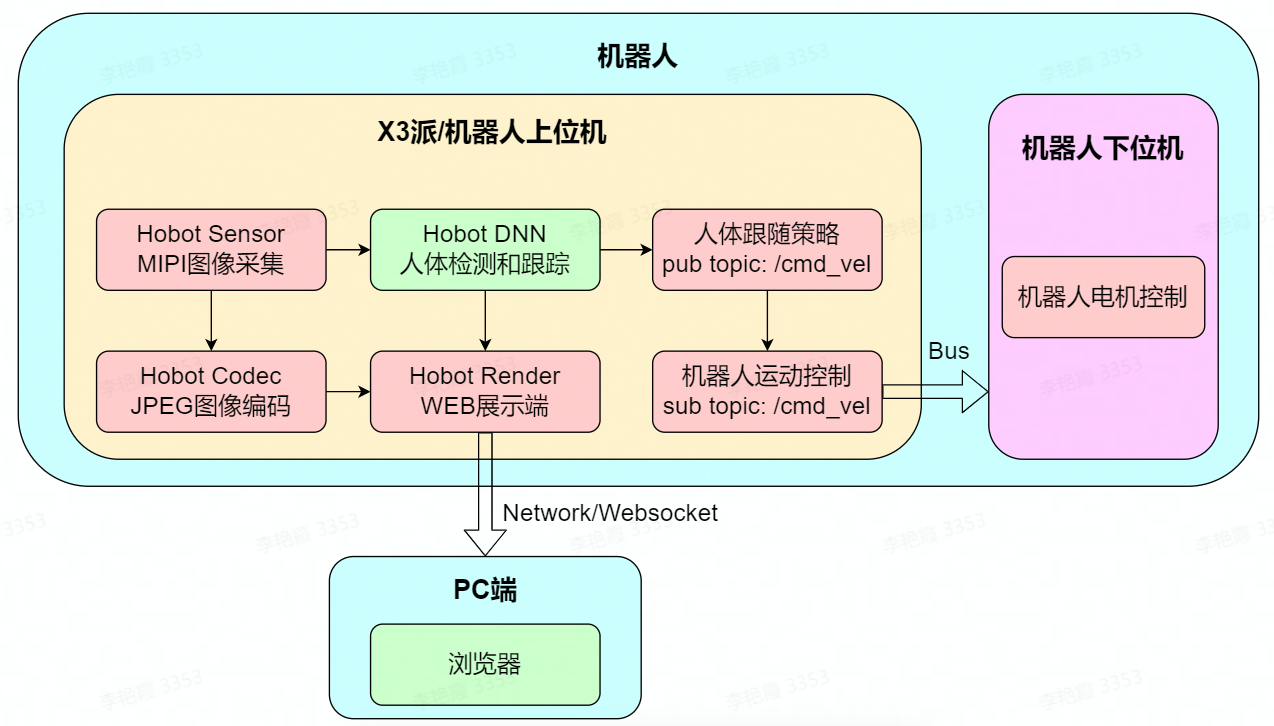
機器人上位機為X3派,運行著多個ROS2 Node,除了5.2章節介紹的傳感、感知、交互和控制功能,還有JPEG圖像編碼和WEB展示功能,將攝像頭發布的圖片編碼壓縮,以及將人體檢測和跟蹤算法發布的AI數據序列化后使用websocket協議發布,實現跨設備在PC端渲染展示和調試(機器人下位機屬于機器人本體的一部分,詳細說明略)。
從App的系統設計圖中可以看出,搭載了X3派和TogetherROS的機器人,利用芯片的AI加速能力和TogetherROS中豐富的算法、機器人開發組件,可以實現快速開發智能機器人應用的目標。
六、FAQ
如何復現App效果?
復現App效果涉及到兩部分:
(1)機器人人體跟隨App
參考第2章準備工作,在X3派上安裝TogetherROS。
(2)本末雙足機器人和機器人運動控制package
獲取方法詳見產品信息:https://developer.horizon.ai/forumDetail/94246984227025410
除了本末雙足機器人,X3派和TogetherROS還適配了小R科技的麥輪小車,也可以使用小R小車直接體驗App效果。
沒有機器人的情況下可以體驗App效果嗎?
可以體驗。 在沒有機器人的情況下,可以使用此App控制gazebo仿真環境下的虛擬機器人運動。
如何將App適配到自己的機器人上?
本文以本末雙足機器人為例介紹人體跟隨App的效果,App本身不依賴于任何形態的機器人,App發布的運動控制消息為ROS2中定義的消息(topic為“/cmd_vel”,消息類型為“geometry_msgs/msg/Twist”,具體說明參考第5章的原理分析)。
如下圖,可以將App的組成劃分成紅色和藍色虛線框兩個部分:
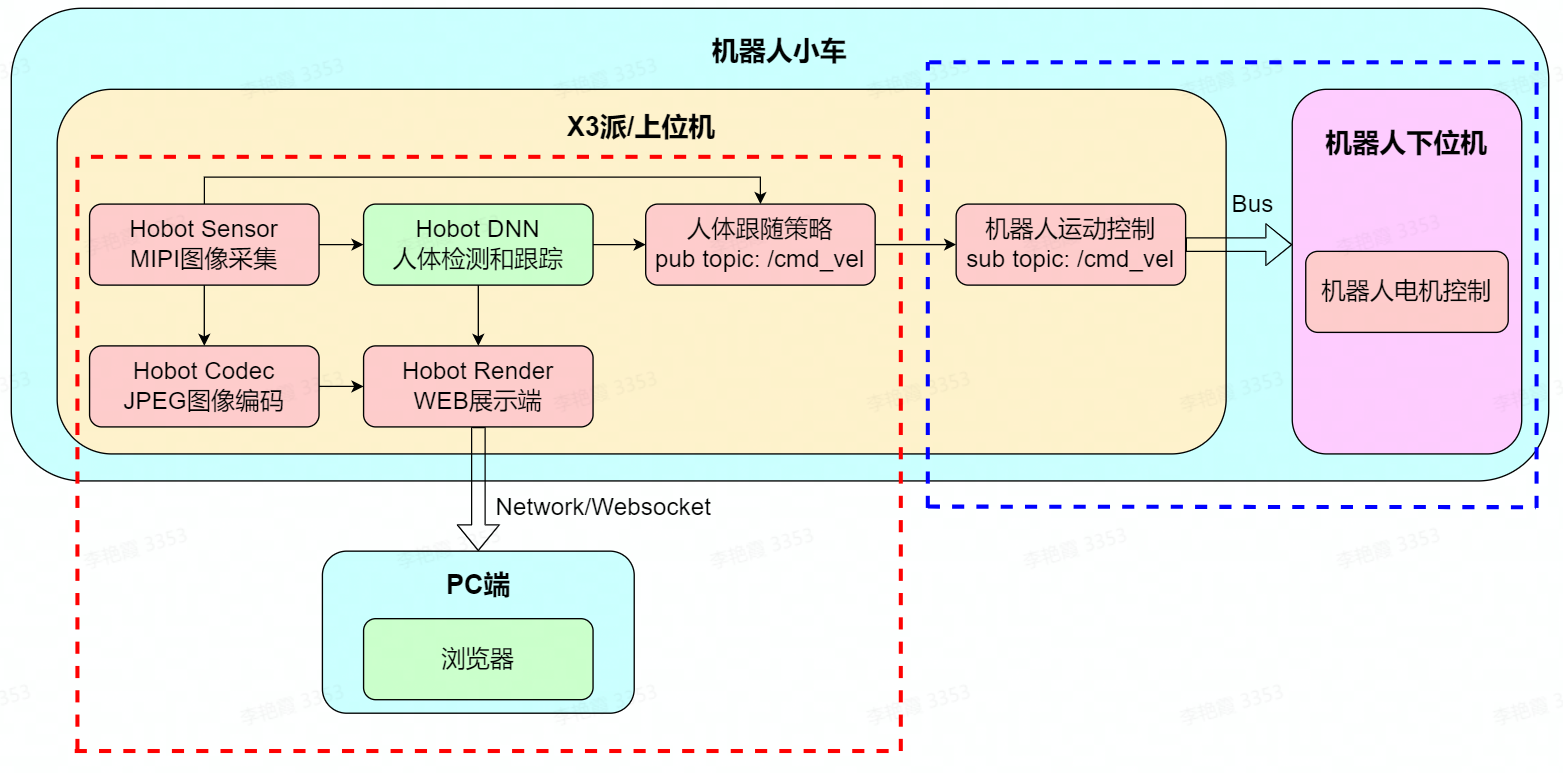
(1)紅色虛線框部分
這部分功能不依賴于機器人,即可以直接移植到任意形態的機器人上。
移植方法為將X3派安裝在機器人上,按照第2章節的準備工作,在X3派上安裝攝像頭傳感器和TogetherROS。
(2)藍色虛線框部分
這部分功能依賴于機器人,需要針對性的適配。根據機器人的狀態不同,對應不同的適配方法。
狀態1,原先機器人上有上位機和下位機,如原先使用樹莓派或者Jetson Nano作為上位機,并且上位機上有機器人運動控制Node。需要在X3派上重新編譯機器人運動控制Node。
狀態2,原先機器人上只有下位機。需要開發機器人運動控制Node后(開發參考components/xrrobot · develop · HHP / app / xr_robot · GitLab (horizon.ai)),在X3派上編譯機器人運動控制Node。
App支持哪些攝像頭?
App對于攝像頭類型沒有要求,地平線機器人平臺支持MIPI和USB兩類攝像頭。對于MIPI攝像頭,支持F37和GC4663兩種型號。
如何調整機器人的運動速度?
修改App啟動腳本hobot_body_tracking_without_gesture.launch.py中人體跟隨策略body_tracking Node中的move_step和rotate_step參數,可以控制機器人的平移和旋轉速度:
# 啟動人體跟隨pkg Node( package='body_tracking', executable='body_tracking', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_mono2d_body_detection"}, {"activate_wakeup_gesture": 0}, {"img_width": 960}, {"img_height": 544}, {"track_serial_lost_num_thr": 30}, {"move_step": 0.5}, {"rotate_step": 0.5}, {"activate_robot_move_thr": 5} ], arguments=['--ros-args', '--log-level', 'info'] )
可以開發一個python的Node擴展App功能嗎?
可以,ROS2支持跨設備、跨平臺、跨語言,TogetherROS完全兼容ROS2 Foxy版本,因此也支持這些特性。
例如根據檢出的人體骨骼關鍵點,開發交互Node,控制人形機器人模仿人的肢體動作。訂閱hobot_mono2d_body_detection話題消息(包含人體骨骼關鍵點信息),使用命令可以查詢到話題的詳細信息:
# ros2 topic info /hobot_mono2d_body_detection Type: ai_msgs/msg/PerceptionTargets Publisher count: 1 Subscription count: 1
消息類型為ai_msgs/msg/PerceptionTargets,因此需要從ai_msgs.msg中import PerceptionTargets消息package。
完整的python代碼示例:
import rclpy from rclpy.node import Node from ai_msgs.msg import PerceptionTargets class MinimalSubscriber(Node): def __init__(self): super().__init__('minimal_subscriber') self.subscription = self.create_subscription( PerceptionTargets, 'hobot_mono2d_body_detection', self.listener_callback, 10) self.subscription # prevent unused variable warning def listener_callback(self, msg): self.get_logger().info('I heard: "%s"\n' % msg) def main(args=None): rclpy.init(args=args) minimal_subscriber = MinimalSubscriber() rclpy.spin(minimal_subscriber) # Destroy the node explicitly # (optional - otherwise it will be done automatically # when the garbage collector destroys the node object) minimal_subscriber.destroy_node() rclpy.shutdown() if __name__ == '__main__': main()
使用python開發完Node后,直接在X3派上編譯并運行。運行并輸出訂閱到的消息:
如何開發一個自己的算法Node擴展App功能?
TogetherROS提供的Hobot DNN簡化板端AI模型推理與部署,釋放BPU算力,降低AI使用門檻。同時內置了常用的檢測、分類和分割算法的模型后處理,幫助用戶快速在X3派上集成部署自己的算法。
本文轉自地平線開發者社區
原作者:zhuk
原鏈接:https://developer.horizon.ai/forumDetail/106482197149630465
-
嵌入式
+關注
關注
5090文章
19176瀏覽量
306895 -
AI
+關注
關注
87文章
31490瀏覽量
269899 -
人工智能
+關注
關注
1794文章
47642瀏覽量
239650 -
地平線
+關注
關注
0文章
354瀏覽量
14994
發布評論請先 登錄
相關推薦
燧原技術伙伴培育計劃第二期開啟
阿里云升級通義靈碼AI程序員,全面上線
ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發布新書《ROS 2智能機器人開發實踐》
智駕科技企業地平線登陸港交所
第五屆長沙·中國1024程序員節開幕
中國自動駕駛第一股的地平線機器人正式上市
華為原生鴻蒙之夜官宣1024程序員節彩蛋:與鴻蒙開發者共碼未來

兆易創新亮相2024地平線地瓜機器人開發者日
必易微受邀參加美的集團第二期電控硬件專項訓練營
地平線助力鑒智機器人多款中階方案斬獲定點合作

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
“千帆杯”第二期十萬大獎花落誰家?TOP10名單出爐!

華為宣布HarmonyOS NEXT鴻蒙星河版開發者預覽面向開發者開放申請






 工商網監
工商網監
評論