") MEMS傾角傳感器工作原理
MEMS傾角傳感器工作原理
傾角傳感器根據(jù)內(nèi)部結(jié)構(gòu)主要有三種不同的原理,固態(tài),液態(tài),氣態(tài)傾角傳感器。
傾角傳感器的定義
用于測(cè)量載體相對(duì)于某個(gè)參考平面傾斜角度的傳感器。
基本原理
理論基礎(chǔ)就是牛頓第二定律,根據(jù)基本的物理原理,在一個(gè)系統(tǒng)內(nèi)部,速度是無(wú)法測(cè)量的,但卻可以測(cè)量其加速度。如果初速度已知,就可以通過(guò)積分計(jì)算出線速度,進(jìn)而可以計(jì)算出直線位移。所以它其實(shí)是運(yùn)用慣性原理的一種加速度傳感器。
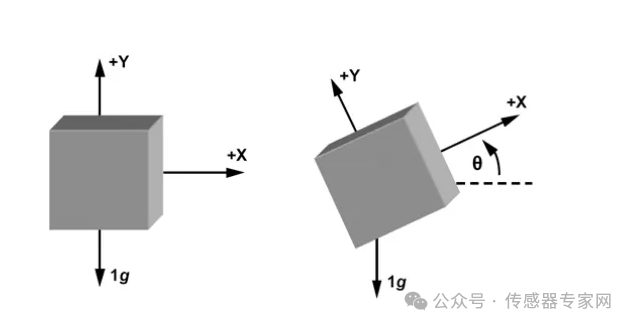
當(dāng)傾角傳感器靜止時(shí)也就是側(cè)面和垂直方向沒(méi)有加速度作用,那么作用在它上面的只有重力加速度。重力垂直軸與加速度傳感器靈敏軸之間的夾角就是傾斜角了。
隨著MEMS技術(shù)的發(fā)展,慣性傳感器件在過(guò)去的幾年中成為最成功,應(yīng)用最廣泛的微機(jī)電系統(tǒng)器件之一,而微加速度計(jì)(microaccelerometer)就是慣性傳感器件的杰出代表。作為最成熟的慣性傳感器應(yīng)用,現(xiàn)在的MEMS加速度計(jì)有非常高的集成度,即傳感系統(tǒng)與接口線路集成在一個(gè)芯片上。
傾角傳感器把MCU,MEMS加速度計(jì),模數(shù)轉(zhuǎn)換電路,通訊單元全都集成在一塊非常小的電路板上面。可以直接輸出角度等傾斜數(shù)據(jù),讓人們更方便的使用它。
其特點(diǎn)是:硅微機(jī)械傳感器測(cè)量(MEMS)以水平面為參面的雙軸傾角變化。輸出角度以水準(zhǔn)面為參考,基準(zhǔn)面可被再次校準(zhǔn)。數(shù)據(jù)方式輸出,接口形式包括RS232、RS485和可定制等多種方式。抗外界電磁干擾能力強(qiáng)。承受沖擊振動(dòng)10000G。
從工作原理上可分為“固體擺”式、“液體擺”式、“氣體擺”三種傾角傳感器
“固體擺”式慣性器件
固體擺在設(shè)計(jì)中廣泛采用力平衡式伺服系統(tǒng),其由擺錘、擺線、支架組成,擺錘受重力G和擺拉力T的作用,其合外力F為:其中,θ為擺線與垂直方向的夾角。在小角度范圍內(nèi)測(cè)量時(shí),可以認(rèn)為F與θ成線性關(guān)系。如應(yīng)變式傾角傳感器就基于此原理。
“液體擺”式慣性器件
液體擺的結(jié)構(gòu)原理是在玻璃殼體內(nèi)裝有導(dǎo)電液,并有三根鉑電極和外部相連接,三根傾角傳感器。電極相互平行且間距相等,當(dāng)殼體水平時(shí),電極插入導(dǎo)電液的深度相同。如果在兩根電極之間加上幅值相等的交流電壓時(shí),電極之間會(huì)形成離子電流,兩根電極之間的液體相當(dāng)于兩個(gè)電阻RI和RIII。若液體擺水平時(shí),則RI=RIII。當(dāng)玻璃殼體傾斜時(shí),電極間的導(dǎo)電液不相等,三根電極浸入液體的深度也發(fā)生變化,但中間電極浸入深度基本保持不變,左邊電極浸入深度小,則導(dǎo)電液減少,導(dǎo)電的離子數(shù)減少,電阻RI增大,相對(duì)極則導(dǎo)電液增加,導(dǎo)電的離子數(shù)增加,而使電阻RIII減少,即RI>RIII。反之,若傾斜方向相反,則RI<RIII。在液體擺的應(yīng)用中也有根據(jù)液體位置變化引起應(yīng)變片的變化,從而引起輸出電信號(hào)變化而感知傾角的變化。在實(shí)用中除此類型外,還有在電解質(zhì)溶液中留下一氣泡,當(dāng)裝置傾斜時(shí)氣泡會(huì)運(yùn)動(dòng)使電容發(fā)生變化而感應(yīng)出傾角的“液體擺”。
氣體擺”式慣性器件
氣體在受熱時(shí)受到浮升力的作用,如同固體擺和液體擺也具有的敏感質(zhì)量一樣,熱氣流總是力圖保持在鉛垂方向上,因此也具有擺的特性。“氣體擺”式慣性元件由密閉腔體、氣體和熱線組成。當(dāng)腔體所在平面相對(duì)水平面傾斜或腔體受到加速度的作用時(shí),熱線的阻值發(fā)生變化,并且熱線阻值的變化是角度q或加速度的函數(shù),因而也具有擺的效應(yīng)。其中熱線阻值的變化是氣體與熱線之間的能量交換引起的。
“氣體擺”式慣性器件的敏感機(jī)理基于密閉腔體中的能量傳遞,在密閉腔體中有氣體和熱線,熱線是唯一的熱源。當(dāng)裝置通電時(shí),對(duì)氣體加熱。在熱線能量交換中對(duì)流是主要形式。
當(dāng)流體的動(dòng)力學(xué)粘度、密度和熱傳導(dǎo)特性一定時(shí),若熱線周圍流體的速度不同,則流過(guò)熱線的電流也不同,從而引起熱線兩端的電壓也產(chǎn)生相應(yīng)的變化。氣體擺式慣性器件就是根據(jù)一原理研制的。
氣體擺式檢測(cè)器件的核心敏感元件為熱線。電流流過(guò)熱線,熱線產(chǎn)生熱量,使熱線保持一定的溫度。熱線的溫度高于它周圍氣體的溫度,動(dòng)能增加,所以氣體向上流動(dòng)。因?yàn)槊荛]腔體中氣體的流動(dòng)是連續(xù)的,所以熱氣流在向上運(yùn)動(dòng)的過(guò)程中,依次經(jīng)過(guò)下部和上部的熱線。若忽略氣體上升過(guò)程中克服重力的能量損失,則穿過(guò)上部熱線的氣流已經(jīng)與下部熱線的產(chǎn)生熱交換,使穿過(guò)兩根熱線時(shí)的氣流速度不同,因此流過(guò)兩根熱線的電流也會(huì)發(fā)生相應(yīng)的變化,所以電橋失去平衡,輸出一個(gè)電信號(hào)。傾斜角度不同,輸出的電信號(hào)也不同。
固、液、氣體擺性能比較
就基于固體擺、液體擺及氣體擺原理研制的傾角傳感器而言,它們各有所長(zhǎng)。在重力場(chǎng)中,固體擺的敏感質(zhì)量是擺錘質(zhì)量,液體擺的敏感質(zhì)量是電解液,而氣體擺的敏感質(zhì)量是氣體。
氣體是密封腔體內(nèi)的唯一運(yùn)動(dòng)體,它的質(zhì)量較小,在大沖擊或高過(guò)載時(shí)產(chǎn)生的慣性力也很小,所以具有較強(qiáng)的抗振動(dòng)或沖擊能力。但氣體運(yùn)動(dòng)控制較為復(fù)雜,影響其運(yùn)動(dòng)的因素較多,其精度無(wú)法達(dá)到軍用武器系統(tǒng)的要求。
固體擺傾角傳感器有明確的擺長(zhǎng)和擺心,其機(jī)理基本上與加速度傳感器相同。在實(shí)用中產(chǎn)品類型較多如電磁擺式,其產(chǎn)品測(cè)量范圍、精度及抗過(guò)載能力較高,在武器系統(tǒng)中應(yīng)用也較為廣泛。
液體擺傾角傳感器介于兩者之間,但系統(tǒng)穩(wěn)定,在高精度系統(tǒng)中,應(yīng)用較為廣泛,且國(guó)內(nèi)外產(chǎn)品多為此類。
MEMS工藝的傾角傳感器
和所有加速度計(jì)一樣,傳感器單元是差動(dòng)電容器,其輸出與加速度成比例。加速度計(jì)的性能依賴于傳感器的結(jié)構(gòu)設(shè)計(jì)。差動(dòng)電容是由懸臂梁構(gòu)成,而懸臂梁是由很多相間分布的指狀電容電極副構(gòu)成,一副指狀電容電極可簡(jiǎn)化為圖1所示的結(jié)構(gòu):
MEMS傾角傳感器工作原理
每個(gè)指狀電極的電容正比例于固定電極和移動(dòng)電極之間的重疊面積以及移動(dòng)電極的位移。顯然,這些都是很小的電容器,并且,為了降低噪聲和提高分辨力,實(shí)際上需要盡可能大的差動(dòng)電容。
懸臂梁的運(yùn)動(dòng)是由支撐它的多晶硅彈簧控制。這些彈簧和懸臂梁的質(zhì)量遵守牛頓第二定律:質(zhì)量為m的物體,因受力F而產(chǎn)生加速度a,則F=ma。而彈簧的形變與所受力的大小成比例,即F= kx,所以X=(m/k)a
式中 x為位移,單位:m;m為質(zhì)量,單位:kg;a為加速度,單位:m/s;k為彈簧剛度系數(shù),單位:N/m。
因此,僅有支撐彈簧的剛度和懸臂梁的質(zhì)量2個(gè)參數(shù)是可控的。減小彈簧系數(shù)似乎是提高懸臂梁靈敏度的一種容易方法,但懸臂梁的共振頻率正比例于彈簧系數(shù),所以,減小彈簧系數(shù)導(dǎo)致懸臂梁共振頻率降低,而加速度計(jì)必須工作在共振頻率之下。此外,增大彈簧系數(shù)使懸臂粱更堅(jiān)固。所以,如果保持盡可能高的彈簧系數(shù),只有懸臂梁的質(zhì)量參數(shù)是可變化的。通常,增大質(zhì)量意味著增大傳感器的面積,從而使懸臂梁增大。在ADXL202中,設(shè)計(jì)出一個(gè)新穎的懸臂梁結(jié)構(gòu)。構(gòu)成X軸和y軸可變電容的指狀電極沿著一個(gè)正方形四周的懸臂梁集成,從而使整個(gè)傳感器的面積減小,而且,共用的大質(zhì)量的懸臂梁提高分辨力。位于懸臂梁四角的彈簧懸掛系統(tǒng)用以使X軸和y軸的靈敏度耦合減小到最小。
典型應(yīng)用場(chǎng)合
- 角度測(cè)量,水平調(diào)整,零位調(diào)整傾角開(kāi)關(guān)(十二路開(kāi)關(guān)信號(hào)),
- 安全控制,監(jiān)控,報(bào)警機(jī)械臂,大壩,建筑,橋梁角度測(cè)量
- 對(duì)準(zhǔn)控制,彎曲控制。初始位置控制,傾角姿態(tài)記錄儀汽車四輪定位
傾角傳感器應(yīng)用特點(diǎn)
可以調(diào)節(jié)輸出頻率,內(nèi)置零位調(diào)整,可以根據(jù)要求定制零位調(diào)整按鈕,從而實(shí)現(xiàn)在一定的角度置零的功能。這對(duì)于要測(cè)量相對(duì)傾角的場(chǎng)合非常有用。使用完畢后可以重新回歸零位。傾角傳感器在這種場(chǎng)合使用,只要將傳感器固定在一定的平面,測(cè)量前使用零位按鈕實(shí)現(xiàn)清零功能,傳感器在此之后讀出來(lái)的數(shù)據(jù)就是相對(duì)于該平面的相對(duì)傾角。
濾波功能
當(dāng)要求輸出比較穩(wěn)定時(shí),建議使用比較平緩的輸出,以使輸出的值趨向平和,而變化不至于太劇烈。如果要求非常及時(shí)的輸出,比如在測(cè)量有較高頻率的振動(dòng)的場(chǎng)合,可以使用高頻輸出,不過(guò),輸出會(huì)因?yàn)轫憫?yīng)時(shí)間非常短而不穩(wěn)定。同時(shí),可以使用內(nèi)部濾波功能,以實(shí)現(xiàn)在振動(dòng)場(chǎng)合測(cè)量?jī)A角的目標(biāo)。
全量程傾角測(cè)量
通過(guò)雙軸的配合,可以實(shí)現(xiàn)360度傾角的測(cè)量。目前產(chǎn)品已經(jīng)非常穩(wěn)定。在一些需要進(jìn)行全量程傾角測(cè)量的場(chǎng)合,選擇360度產(chǎn)品是比較理想的。

-
傳感器
+關(guān)注
關(guān)注
2552文章
51382瀏覽量
755798 -
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
190970
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
從入門到精通:傾角傳感器工作原理全解析,分類應(yīng)用全都有
什么是雙軸傾角傳感器
線性傳感器工作原理
mems傳感器是什么意思_mems傳感器原理是什么
體溫傳感器工作原理是什么
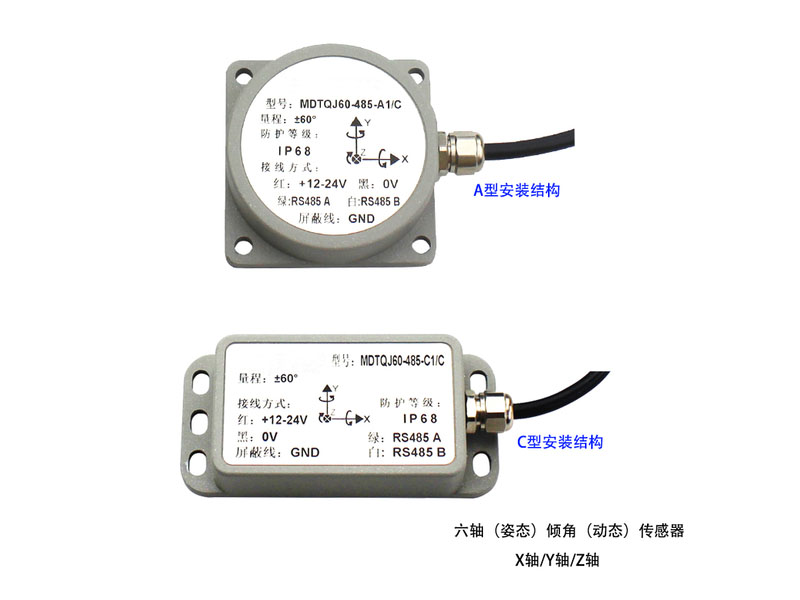
六軸姿態(tài)傾角動(dòng)態(tài)傳感器
維特智能MEMS傾角傳感器溫漂,實(shí)現(xiàn)精準(zhǔn)測(cè)量
60+圖片,10大MEMS傳感器原理全解析!網(wǎng)上很難找到!
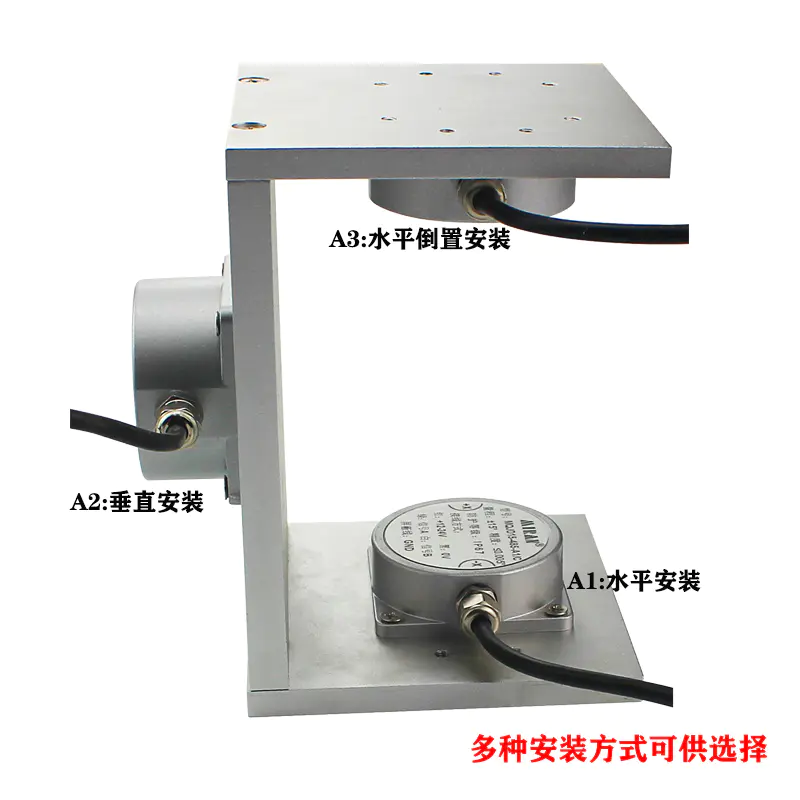
傾角傳感器的安裝及應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論