 【世說芯品】噓~工作環境禁止步進電機噪音Remix!
【世說芯品】噓~工作環境禁止步進電機噪音Remix!
步進電機作為執行元件,是機電一體化的關鍵產品之一,由于其結構簡單、控制方便、安全性高,在低速情況下不需要減速機就可以輸出很大的力矩,相比直流無刷和伺服電機,不需要復雜的控制算法也不需要編碼器反饋情況下可以實現位置控制,被用在很多要求精確定位的場合,例如自動化控制、數字化生產如3D打印、醫療和光學等眾多領域。

然而,步進電機低速共振,噪音大幾乎是工程師們公認的固有特性,如何有效控制步進電機的噪音問題呢?
換成步距角更小的電機,例如5相步進電機試試?
成本太高......
換成伺服電機或者閉環步進電機呢?
成本太高......
在電機軸上增加阻尼器?
采用帶有細分功能的驅動?
有效果,但還是無法實現更靜音的需求......
 三招“秘笈”,降低噪聲步進電機特別是在低速的時候,低的步距分辨率模式比如半步或者整步是步進電機噪音的主要來源步,另一方面則是來自斬波和脈寬調制(PWM)的不良模式反應。
三招“秘笈”,降低噪聲步進電機特別是在低速的時候,低的步距分辨率模式比如半步或者整步是步進電機噪音的主要來源步,另一方面則是來自斬波和脈寬調制(PWM)的不良模式反應。

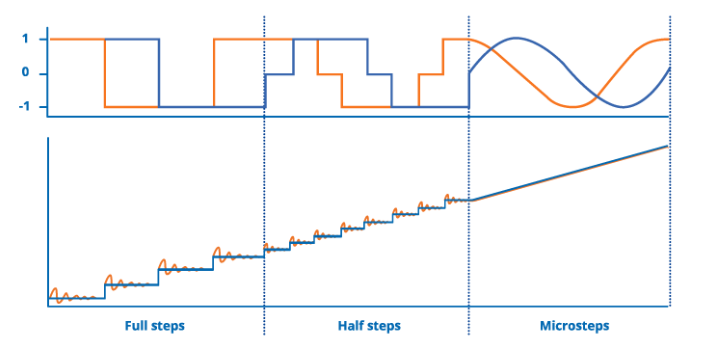
降噪秘笈一:微步驅動
步進電機通常使用永磁體作為轉子,使用電機線圈作為定子,通過向電機線圈發送電流,會產生一個電磁場,迫使磁轉子進入所需的位置。然而,該電流必須以這樣的方式進行斬波,以使電機按需要運行。混合式步進電機最多允許產生每轉200的步進數,使用額外的電流狀態生成更小的步進數,例如半步或微步,這提高了電機的精度、扭矩和效率,同時減少了失步、振動和噪音。
降噪秘笈二:SpreadCycle
步進電機噪音和振動的另外一個來源是傳統的斬波方式和脈寬調制(PWM)模式,因為比較粗的步距分辨率是產生振動和噪音的主要因素,我們通常忽視了斬波和PWM帶來的問題。傳統的恒定PWM斬波模式是電流控制的PWM斬波模式,該模式在快速衰減和慢速衰減之間有個固定關系,在其最大數值的時候,電流才會達到規定的目標電流,最終導致平均電流是小于預期目標電流的。
相比恒定的斬波模式,ADI Trinamic的SpreadCycle PWM斬波模式在慢速和快速衰減器之間自動配置一個磁滯衰減功能。平均電流反應了配置的正常電流,在正弦的過零點不會出現過渡期,這就減少電流和力矩的波動,是電流波形更加接近正弦波,相比傳統恒定斬波模式,SpreadCycle PWM斬波模式控制下的電機運行得要平穩、平滑很多,從而實現靜音電機控制。
降噪秘笈三:StealthChop
雖然先進的電流控制PWM斬波器改善了電機性能,但仍然存在一些對某些應用至關重要的噪音和振動。這是因為電流調節斬波器總是在逐個周期的基礎上對線圈電流測量做出反應,從而導致電機線圈之間產生噪聲以及電磁耦合,進而影響電流斬波器。穩壓斬波器 StealthChop 通過根據 PWM 占空比調制電流來克服這一問題,從而產生完美的電流正弦波。
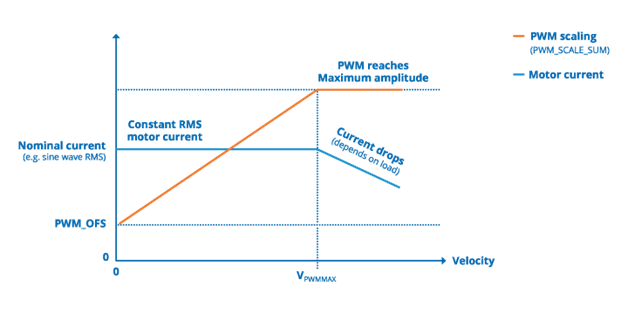
除了電機軸承鋼球磨擦的聲音是無法避免的之外,StealthChop可以驅動電機工作在極度的靜音下,實現控制電機聲音在10dB以下,噪音大大低于傳統電流控制方式。 常規的控制模式下步進電機在低速情況下會出現比較大的噪音和震動,ADI Trinamic提供帶有StealthChop功能的驅動模塊,包括單軸、三軸和六軸驅控模塊,在StealthChop模式下即使速度很低也聽不到明顯的聲音,能有效改善步進電機的噪聲。
常規的控制模式下步進電機在低速情況下會出現比較大的噪音和震動,ADI Trinamic提供帶有StealthChop功能的驅動模塊,包括單軸、三軸和六軸驅控模塊,在StealthChop模式下即使速度很低也聽不到明顯的聲音,能有效改善步進電機的噪聲。
原文轉自亞德諾半導體
-
電機
+關注
關注
142文章
9078瀏覽量
146096
發布評論請先 登錄
相關推薦
BJT工作環境對性能的影響
如何有效減少工作環境中的ESD靜電
行星減速步進電機與步進電機的區別

什么是步進電機?它的工作原理是什么?

反射內存卡工作環境

步進電機的工作原理介紹

步進電機的類型及工作原理





 工商網監
工商網監
評論