 激光雷達的工作原理與雷達非常相近!
激光雷達的工作原理與雷達非常相近!
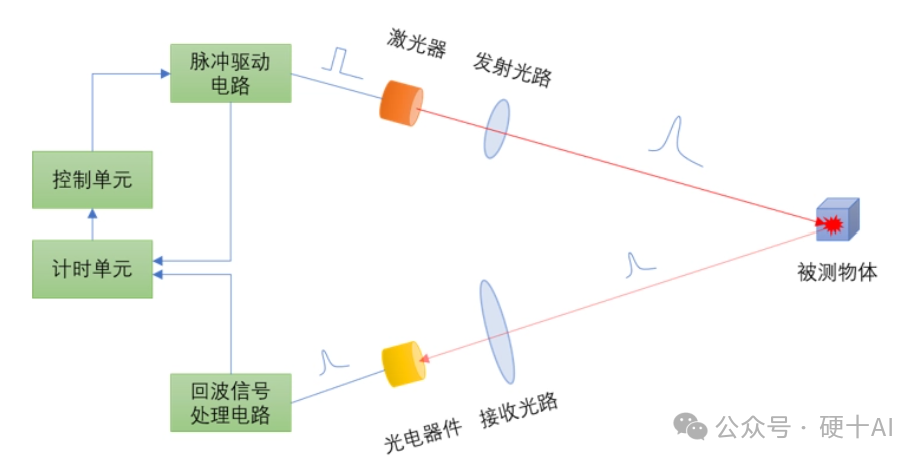
LIDAR系統包括一個單束窄帶激光器和一個接收系統。激光器產生并發射一束光脈沖,打在物體上并反射回來,最終被接收器所接收。接收器準確地測量光脈沖從發射到被反射回的傳播時間。因為光脈沖以光速傳播,所以接收器總會在下一個脈沖發出之前收到前一個被反射回的脈沖。鑒于光速是已知的,傳播時間即可被轉換為對距離的測量。結合激光器的高度,激光掃描角度,從GPS得到的激光器的位置和從INS得到的激光發射方向,就可以準確地計算出每一個地面光斑的坐標X,Y,Z。激光束發射的頻率可以從每秒幾個脈沖到每秒幾萬個脈沖。舉例而言,一個頻率為每秒一萬次脈沖的系統,接收器將會在一分鐘內記錄六十萬個點。一般而言,LIDAR系統的地面光斑間距在2-4m不等。
激光雷達的工作原理與雷達非常相近,以激光作為信號源,由激光器發射出的脈沖激光,打到地面的樹木、道路、橋梁和建筑物上,引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理計算,就得到從激光雷達到目標點的距離,脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,就可得到精確的三維立體圖像。
深圳市不止技術有限公司是激光雷達行業頭部知名企業,團隊自2016年底就開始了多款激光雷達方案的研發,并創造了30多件發明專利,我們作為激光雷達行業5年多的資深老兵,對激光雷達有著深厚的技術積累。是一家能提供單點、單線到多線全系列、dtof、itof全品類激光雷達方案定制化的公司,而且掌握了機器人移動底盤技術。在激光雷達核心硬件、專用芯片、AI算法上具有完整的自主知識產權。
激光雷達最基本的工作原理與無線電雷達沒有區別,即由雷達發射系統發送一個信號,經目標反射后被接收系統收集,通過測量反射光的運行時間而確定目標的距離。至于目標的徑向速度,可以由反射光的多普勒頻移來確定,也可以測量兩個或多個距離,并計算其變化率而求得速度,這也是直接探測型雷達的基本工作原理。

-
激光雷達
+關注
關注
968文章
4024瀏覽量
190260
發布評論請先 登錄
相關推薦
激光雷達VS毫米波雷達,優缺點全知道!
一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
科普:一文了解固態和半固態激光雷達
激光雷達會傷害眼睛嗎?

激光雷達的工作原理和分類
激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
光學雷達和激光雷達的區別是什么
激光雷達與毫米波雷達的優缺點是什么
激光雷達VS毫米波雷達,一文讀懂!

一文看懂激光雷達

激光雷達選型秘訣,五大要素助您輕松決策

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論