") 基于人工智能輔助的立體觀測技術(shù)
基于人工智能輔助的立體觀測技術(shù)
海洋具有豐富的資源,不僅是人類賴以生存的物質(zhì)基礎(chǔ),也是國際政治斗爭的重要舞臺(tái)。作為世界各國關(guān)注的重點(diǎn)區(qū)域,海洋具有重要的戰(zhàn)略地位和極大的經(jīng)濟(jì)價(jià)值。爭奪海洋資源、維護(hù)國家海洋權(quán)益、保護(hù)海洋環(huán)境、發(fā)展海洋科技已被世界各國列為重大發(fā)展戰(zhàn)略。
海洋觀測與探測是獲取海洋信息的重要手段,是海洋經(jīng)濟(jì)發(fā)展、環(huán)境保護(hù)、科技創(chuàng)新等活動(dòng)的基礎(chǔ)。一直以來,海洋信息感知能力的缺乏是制約各國海洋科技發(fā)展的瓶頸。加強(qiáng)探測技術(shù)裝備研發(fā),發(fā)展創(chuàng)新感知技術(shù),建設(shè)海洋立體觀測體系,是發(fā)展“海洋強(qiáng)國”戰(zhàn)略、實(shí)現(xiàn)海洋科技創(chuàng)新的重要方向。
當(dāng)前,隨著世界各國海洋事業(yè)的迅猛發(fā)展,衛(wèi)星遙感、水下滑翔機(jī)(AUG)、水下自主航行器(AUV)、大型潛/浮標(biāo)等觀測技術(shù)和設(shè)備不斷更新,世界各國的海洋觀測網(wǎng)絡(luò)逐步完善。特別是歐美等發(fā)達(dá)國家,已建立起全球范圍的實(shí)時(shí)海洋觀測系統(tǒng),如ARGO、GOOS、ONC、IOOS、OOI、EMSO、GTMBA等。其中,地轉(zhuǎn)海洋實(shí)時(shí)觀測陣(ARGO)實(shí)現(xiàn)了歷史上首個(gè)全球尺度的上層海洋水文要素的準(zhǔn)實(shí)時(shí)觀測。其測量數(shù)據(jù)的空間范圍和精度達(dá)到了空前的高度,為全球大洋溫鹽場研究提供了歷史性的難得機(jī)遇。另一個(gè)值得關(guān)注的是全球海洋觀測系統(tǒng)(GOOS)。它是由國際組織聯(lián)合發(fā)起的目前全球最大的、綜合性最強(qiáng)的海洋觀測系統(tǒng),能為監(jiān)測氣候變化等研究提供全面高質(zhì)量的觀測資料。
相比發(fā)達(dá)國家,雖然我國的海洋觀測體系起步較晚,但依托國家高技術(shù)研究發(fā)展計(jì)劃(“863”計(jì)劃)、國家重點(diǎn)基礎(chǔ)研究發(fā)展計(jì)劃(“973”計(jì)劃),以及“十三五”國家重點(diǎn)研發(fā)計(jì)劃等重點(diǎn)計(jì)劃以及一系列專項(xiàng),我國海洋工程與科學(xué)技術(shù)獲得快速發(fā)展。我國已基本掌握溫鹽深剖面儀(CTD)、聲學(xué)多普勒流速剖面儀(ADCP)、AUV、AUG等觀測設(shè)備研制的核心技術(shù);布置了各類海洋浮標(biāo)、調(diào)查船、潛水器以及各類海洋觀測陣列等固定或移動(dòng)的觀測平臺(tái);發(fā)射了以可見光探測為主荷載的HY-1A、HY-1B等海洋水色衛(wèi)星。
目前,我國在南海和西太平洋等核心區(qū)域已經(jīng)初步構(gòu)建起完整的觀測體系。表1總結(jié)了我國主要的海底觀測網(wǎng)研究項(xiàng)目。圖1展示了浙江大學(xué)信號(hào)空間與信息系統(tǒng)研究所(信號(hào)所)“十三五”期間在國家重點(diǎn)研發(fā)計(jì)劃的支持下,牽頭研制的南海深海大規(guī)模聲學(xué)層析系統(tǒng)。
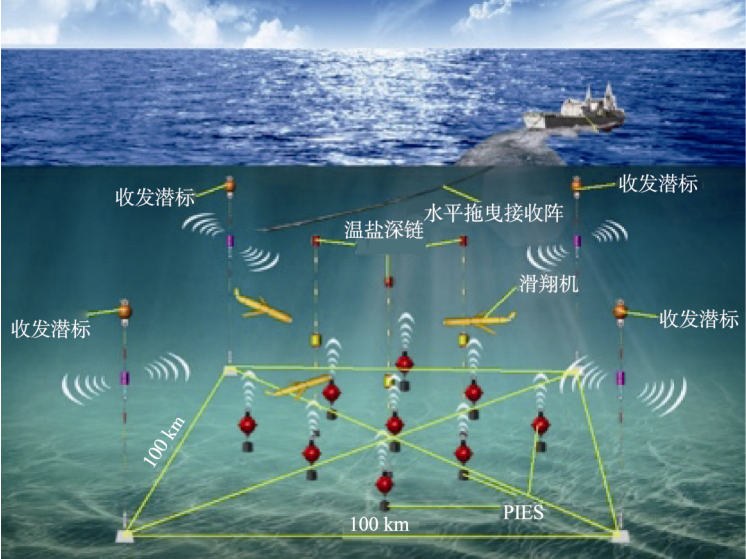 圖1 浙江大學(xué)牽頭研制的南海大規(guī)模聲學(xué)層析系統(tǒng)
圖1 浙江大學(xué)牽頭研制的南海大規(guī)模聲學(xué)層析系統(tǒng)
該系統(tǒng)包含深海聲學(xué)層析潛標(biāo)、倒置式壓力回聲儀(PIES)、滑翔機(jī)等固定與移動(dòng)節(jié)點(diǎn),于西沙、中沙以東海域約100km×100km×3km立體區(qū)域內(nèi)開展聲速場的觀測與反演,進(jìn)行了1個(gè)月的應(yīng)用示范。圖2展示了浙大信號(hào)所“十三五”期間在國家重點(diǎn)研發(fā)計(jì)劃的支持下,研制的環(huán)境自適應(yīng)采樣、聲場–動(dòng)力協(xié)同測量及聲學(xué)協(xié)同探測系統(tǒng),包含8臺(tái)以上AUV與10臺(tái)以上滑翔機(jī),觀測范圍超過10000km2,示范時(shí)間1個(gè)月以上。
表1 我國現(xiàn)有海底觀測網(wǎng) 
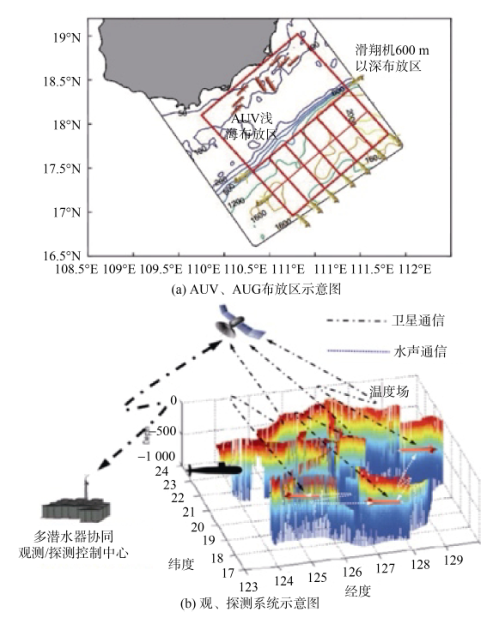 圖2 浙江大學(xué)牽頭研制的無人無纜潛水器組網(wǎng)觀測、探測系統(tǒng)
圖2 浙江大學(xué)牽頭研制的無人無纜潛水器組網(wǎng)觀測、探測系統(tǒng)
上述觀測系統(tǒng)的建立,極大地提高了獲取海洋數(shù)據(jù)、感知海洋信息的能力。然而,整體而言,目前的觀測體系雖已初具規(guī)模,但存在著區(qū)域碎片化、信息單一化、時(shí)空分辨低質(zhì)化等問題。另一方面,當(dāng)前海洋立體觀測網(wǎng)的信號(hào)處理能力尚不能充分開發(fā)觀測數(shù)據(jù)的深層知識(shí),支撐海洋環(huán)境的實(shí)時(shí)精準(zhǔn)模擬預(yù)報(bào),因此亟需發(fā)展面向海洋立體–觀測感知體系的先進(jìn)信號(hào)處理理論與技術(shù)。
近年來,人工智能(AI)、機(jī)器學(xué)習(xí)(ML)的快速發(fā)展帶來了各個(gè)領(lǐng)域技術(shù)的革新。值得特別關(guān)注的是近期提出的科學(xué)人工智能(AIforScience),旨在用AI輔助解決不同領(lǐng)域的科學(xué)難題。例如,在材料和化學(xué)領(lǐng)域,研究人員利用AI技術(shù)預(yù)測候選材料的性能,從而加快新材料的研發(fā)速度,降低研發(fā)成本;在生物領(lǐng)域,深度學(xué)習(xí)(DL)輔助研究人員進(jìn)行蛋白質(zhì)結(jié)構(gòu)的預(yù)測,幫助開發(fā)全新的生物材料;在數(shù)學(xué)領(lǐng)域,Nature封面論文報(bào)道了深度強(qiáng)化學(xué)習(xí)方法(DRL)輔助發(fā)現(xiàn)降低矩陣乘法運(yùn)算次數(shù)的新方法,具有深遠(yuǎn)理論意義。
在海洋大數(shù)據(jù)以及AI發(fā)展的驅(qū)動(dòng)下,人工智能與海洋立體觀測和探測的應(yīng)用交叉融通,為未來的數(shù)字海洋與水下攻防技術(shù)提供了新的研究方向與技術(shù)路徑。本文在梳理海洋立體觀測與探測經(jīng)典方法的基礎(chǔ)上,著重介紹了近年來新發(fā)展的AI輔助方法;通過討論和分析AI方法和傳統(tǒng)方法的優(yōu)缺點(diǎn),指出發(fā)展AI輔助的海洋立體觀測與探測方法中亟需解決的關(guān)鍵科學(xué)問題及潛在的解決思路,并展望了該領(lǐng)域的發(fā)展方向。
一、人工智能輔助的立體觀測技術(shù)
海洋觀測是獲取海洋信息的第1步。如何基于已經(jīng)建立的觀測系統(tǒng),實(shí)現(xiàn)對(duì)目標(biāo)區(qū)域海洋的高分辨、高準(zhǔn)確度信息的快速獲取,是很有挑戰(zhàn)的科學(xué)難題。針對(duì)海洋數(shù)據(jù)具有的空時(shí)變化特性,下面從空間和時(shí)間這2個(gè)角度來討論現(xiàn)有的海洋觀測技術(shù)。
⒈空間數(shù)據(jù)觀測
雖然目前的海洋觀測系統(tǒng)能夠獲取大量、準(zhǔn)實(shí)時(shí)的數(shù)據(jù),但面對(duì)廣袤無垠的大海,測量數(shù)據(jù)依然十分稀疏,且測量的過程往往伴隨著一定的噪聲。如何根據(jù)有噪、稀疏的測量數(shù)據(jù)快速重建出整個(gè)空間的海洋物理場,是一個(gè)非常有挑戰(zhàn)的逆問題。下面根據(jù)使用的不同原理介紹不同的空間物理場重建方法。
⑴利用空間相關(guān)性重建
根據(jù)地理學(xué)第一定律,相似區(qū)域的數(shù)據(jù)在數(shù)值上通常很接近。利用這一特性,許多利用空間相關(guān)性的插值方法被提出。根據(jù)使用的不同原理,這些方法可以分為確定性插值和地統(tǒng)計(jì)插值。表2列舉了常用的空間插值方法。確定性插值方法通常假設(shè)未知點(diǎn)的值是觀測值的線性加權(quán)組合,通過求解線性方程組或由空間相關(guān)性求出加權(quán)系數(shù)。它的優(yōu)點(diǎn)是數(shù)學(xué)模型簡單,計(jì)算復(fù)雜度低,適合應(yīng)用于信噪比較高且側(cè)重重建速度的場景。在海洋工程學(xué)方面,KITSIOUS等人使用反距離權(quán)重插值對(duì)海洋中不同生態(tài)指數(shù)的空間分布進(jìn)行預(yù)測;RIDGWAY等人提出了一種基于局部加權(quán)最小二乘擬合的四維海洋插值方法,對(duì)不同海域的物理和化學(xué)參數(shù)進(jìn)行了估計(jì)。
表2 常用的空間插值方法 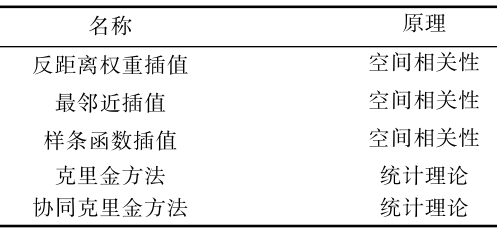
地統(tǒng)計(jì)插值的代表方法為克里金方法。與確定性插值類似,克里金方法也假設(shè)未知點(diǎn)的值是觀測值的線性加權(quán)組合;但不同的是,克里金方法的加權(quán)系數(shù)是基于空間統(tǒng)計(jì)學(xué),結(jié)合優(yōu)化方法求得。具體而言,克里金方法假設(shè)物理場是二階平穩(wěn)的高斯過程,通過確保估計(jì)無偏且誤差的方差最小來確定加權(quán)系數(shù)。
理論分析表明,基于統(tǒng)計(jì)理論的克里金方法可以給出最佳線性無偏估計(jì)(BLUP),插值效果通常比確定性插值方法更好。另外,克里金方法給出的預(yù)測不確定性的定量描述也可以幫助下游任務(wù)的決策。但傳統(tǒng)的克里金方法也存在一些缺點(diǎn):沒有考慮觀測噪聲,在信噪比低時(shí)效果較差;需要根據(jù)實(shí)際數(shù)據(jù)手動(dòng)選擇合適的變異模型,且模型中的參數(shù)由最小二乘確定,容易被異常值影響;計(jì)算復(fù)雜度為立方階,不適合應(yīng)用于大規(guī)模的場景。
同樣,AI方法可以在一定程度上輔助解決傳統(tǒng)插值方法遇到的問題。從機(jī)器學(xué)習(xí)的角度,克里金可以看成是機(jī)器學(xué)習(xí)中的高斯過程回歸(GPR)的特殊形式。高斯過程回歸不僅建模了噪聲,而且建模空間相關(guān)性的核函數(shù)(KernelFunction)的參數(shù)可以通過最大化證據(jù)函數(shù)(EvidenceFunction)從數(shù)據(jù)中學(xué)習(xí),因此性能比克里金方法更好,但計(jì)算復(fù)雜度一樣高。
CAVIEDES等人利用GPR進(jìn)行二維聲速場的重建并提出了一種具有物理意義的核函數(shù),達(dá)到了比傳統(tǒng)基于線性回歸的重建方法更優(yōu)異的性能。近期也有一些工作通過近似方法降低了高斯過程回歸的計(jì)算復(fù)雜度,使其能在大規(guī)模的場景應(yīng)用。傳統(tǒng)插值方法中線性以及平穩(wěn)的假設(shè)在實(shí)際情況中不一定滿足,而深度學(xué)習(xí)具有良好的建模非線性的能力,因此近期有研究工作將深度學(xué)習(xí)和克里金方法結(jié)合起來,在某些情況取得了更好的效果。另外,LI與HEAP分析了影響各類空間插值方法性能的因素,研究了機(jī)器學(xué)習(xí)與傳統(tǒng)插值的結(jié)合方法,并為不同方法的應(yīng)用提供了建議。
總的來說,海洋空間物理場重建的關(guān)鍵在于尋找高表示力與高泛化力的數(shù)學(xué)模型以精準(zhǔn)刻畫立體區(qū)域內(nèi)的動(dòng)態(tài)關(guān)系。未來的研究中,如何巧妙結(jié)合張量模型、高斯過程與神經(jīng)網(wǎng)絡(luò)分別在多維、數(shù)據(jù)自適應(yīng)與非線性建模的優(yōu)勢,探索最優(yōu)化的建模與重建,是重要的研究課題。
⑵利用表征模型重建
除了空間相關(guān)性,從歷史或者模式數(shù)據(jù)中學(xué)習(xí)到的規(guī)律也能幫助重建。具體而言,可以利用表征模型從歷史數(shù)據(jù)中學(xué)習(xí)出一組基函數(shù),從而將重建問題轉(zhuǎn)化為求解基函數(shù)系數(shù)的問題。數(shù)學(xué)上,引入表征模型可以使待求參數(shù)的數(shù)量大大減少,從而降低了求解欠定的重建問題的難度。從貝葉斯的角度理解,學(xué)習(xí)出的基函數(shù)可以為重建問題提供一定的先驗(yàn)信息,從而減少需要從觀測數(shù)據(jù)中獲得的信息量,使問題求解更加容易。因此,解決重建問題可以從獲得良好的表征模型入手。
目前常用的表征學(xué)習(xí)方法為經(jīng)驗(yàn)正交函數(shù)(EOF)方法。該方法的基函數(shù)是從數(shù)據(jù)中學(xué)習(xí)得到,因此相比通用的傅里葉基或小波基等基函數(shù)能更好地表示和訓(xùn)練集具有相似性質(zhì)的數(shù)據(jù),展現(xiàn)了數(shù)據(jù)驅(qū)動(dòng)的表征學(xué)習(xí)方法的優(yōu)異性能。
從機(jī)器學(xué)習(xí)的角度,EOF方法和機(jī)器學(xué)習(xí)中的主成分分析(PCA)具有相同的理論性質(zhì)和數(shù)學(xué)表達(dá)。因此,可以進(jìn)行非線性降維的PCA的變種例如核PCA(KPCA)等方法理論上表征能力更強(qiáng)。另外,有研究人員引入計(jì)算機(jī)視覺領(lǐng)域的字典學(xué)習(xí)(DL)方法來表征聲速,相比EOF方法在相同重建誤差下需要的系數(shù)更少。
傳統(tǒng)的表征方法都假設(shè)數(shù)據(jù)是二維的,因此沒有考慮海洋數(shù)據(jù)多維度的相關(guān)性。針對(duì)海洋聲速場的多維特性,張量模型,作為向量/矩陣模型向多維表征的拓展,具有天然的建模優(yōu)勢。近期研究通過剖析經(jīng)典聲速表征基函數(shù)(如EOF等)的數(shù)學(xué)本質(zhì),首次發(fā)現(xiàn)幾類經(jīng)典基函數(shù)的推導(dǎo)可以統(tǒng)一在張量分解模型的框架下。張量建模的統(tǒng)一視角在理論上解釋了幾類經(jīng)典基函數(shù)的作用機(jī)理與表征性能,并提供了更高性能的基函數(shù)學(xué)習(xí)框架。在此工作的啟發(fā)下,CHEN等人提出了三維聲速的張量字典學(xué)習(xí)方法,進(jìn)一步提升了表征性能;JI等人探討了機(jī)器學(xué)習(xí)中的基函數(shù)與海洋現(xiàn)象(中尺度渦)物理模型的關(guān)聯(lián),并發(fā)展中尺度渦定制化的高性能表征模型。
盡管張量建模的可行性與優(yōu)越性得到了初步的驗(yàn)證,但是具有最優(yōu)表示力與環(huán)境自適應(yīng)的模型尚未開發(fā)。如何利用海洋數(shù)據(jù)多維的相關(guān)性,從現(xiàn)有表征模型中提取深層次的先驗(yàn)信息幫助重建,是未來重要的研究方向。
⒉時(shí)序數(shù)據(jù)觀測
目前應(yīng)用最廣泛的獲取大面積、長時(shí)序海洋數(shù)據(jù)的方法為數(shù)據(jù)同化(DA),下面介紹它的主要思想。從物理學(xué)的角度,海洋數(shù)據(jù)與海水的物理特性存在緊密的聯(lián)系,例如海水中的聲速是溫度、鹽度和深度的函數(shù)。而這些物理參數(shù)隨時(shí)間的變化規(guī)律符合海洋動(dòng)力學(xué),可以用偏微分方程(PDE)來描述。隨著超級(jí)計(jì)算機(jī)技術(shù)的不斷發(fā)展,數(shù)值模式逐漸成為研究海洋動(dòng)力過程的重要工具。
給定合適的初始條件和邊界條件后,數(shù)值模式就能給出時(shí)空連續(xù)變化的海洋過程。然而,描述流體運(yùn)動(dòng)規(guī)律的方程本身具有強(qiáng)非線性,初始條件和邊界條件的誤差會(huì)在模式運(yùn)行過程中不斷累積,導(dǎo)致最終模擬的結(jié)果與實(shí)際觀測產(chǎn)生較大的偏差。數(shù)據(jù)同化技術(shù)的核心思想就是將觀測數(shù)據(jù)與數(shù)值模式有效結(jié)合,以觀測數(shù)據(jù)校正模式誤差,使數(shù)值模式能夠更好地反應(yīng)實(shí)際海洋動(dòng)力過程。現(xiàn)有的模式包括混合坐標(biāo)大洋環(huán)流模式(HYCOM)、有限體積海岸海洋模型(FVCOM)等,它們各自有適用的范圍和計(jì)算方法。
根據(jù)不同的原理,目前的數(shù)據(jù)同化方法大致可分為基于統(tǒng)計(jì)理論的統(tǒng)計(jì)方法和基于控制論的變分方法。表3總結(jié)了常見的數(shù)據(jù)同化方法。
表3 常見的數(shù)據(jù)同化方法 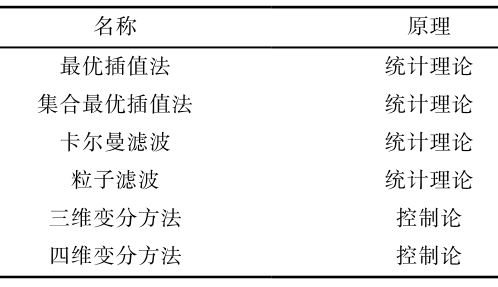
總的來說,數(shù)據(jù)同化方法可以引入領(lǐng)域知識(shí)(DomainKnowledge)先驗(yàn),包括海洋動(dòng)力學(xué)中的物理定律和從歷史數(shù)據(jù)中學(xué)習(xí)到的規(guī)律。因此同化方法具有直觀的物理含義,通常只需要少量的實(shí)測數(shù)據(jù)就可以完成對(duì)數(shù)值模型的校正。但是,由于海洋動(dòng)力學(xué)中的物理學(xué)定律比較復(fù)雜,除極個(gè)別的情況,很難求得描述海洋運(yùn)動(dòng)的流體力學(xué)偏微分方程的解析解。另外,統(tǒng)一、固定的動(dòng)力學(xué)模型并不能較好地適應(yīng)實(shí)際情況中復(fù)雜多變的海洋環(huán)境,導(dǎo)致即使結(jié)合了實(shí)際觀測數(shù)據(jù),模式預(yù)報(bào)的結(jié)果也可能存在較大的偏差。且由于受到觀測精度和計(jì)算能力的限制,模式預(yù)報(bào)給出的結(jié)果通常是低分辨的,難以滿足實(shí)際海戰(zhàn)的需求。例如,雖然HYCOM可以達(dá)到全球1/10°的分辨率,但在很多軍事應(yīng)用中分辨率要求達(dá)到1/100°,甚至更低。
數(shù)據(jù)同化方法遇到的問題在一定程度上可以用AI方法輔助解決。例如,深度學(xué)習(xí)方法可以估計(jì)和修正傳統(tǒng)同化方法的誤差。WASTON使用神經(jīng)網(wǎng)絡(luò)來估計(jì)Lorenz'96系統(tǒng)中的模型誤差趨勢,并依此糾正短期和長期預(yù)報(bào)的錯(cuò)誤。修正后的模型在預(yù)報(bào)和建模氣候統(tǒng)計(jì)特性方面都有顯著改進(jìn)。
另一方面,神經(jīng)網(wǎng)絡(luò)可以高效求解偏微分方程,從而降低仿真物理場的計(jì)算量。TOMPSON等人提出了一種數(shù)據(jù)驅(qū)動(dòng)的方法,結(jié)合卷積神經(jīng)網(wǎng)絡(luò)(CNN)的近似能力和標(biāo)準(zhǔn)求解器的高精度來高效求解不可壓縮的歐拉方程。BRANDSTETTER等人基于神經(jīng)消息傳遞(MP)構(gòu)建了一個(gè)偏微分方程求解器,可以將有限差分法(FDM)、有限體積法(FVM)等傳統(tǒng)方法納入特殊情況,在類似流體的問題上展示出優(yōu)于部分最先進(jìn)的數(shù)值求解器的性能。
神經(jīng)網(wǎng)絡(luò)建模非線性相關(guān)性和學(xué)習(xí)序列數(shù)據(jù)特征的能力也能更好適應(yīng)實(shí)際中復(fù)雜多變的海洋環(huán)境。YU等人結(jié)合張量方法和循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN),提出了一類可以建模多變量非線性系統(tǒng)的模型,并在仿真數(shù)據(jù)和實(shí)際溫度數(shù)據(jù)上驗(yàn)證了方法的有效性。結(jié)果表明,該方法在長期數(shù)據(jù)預(yù)測任務(wù)上達(dá)到了比一般的RNN和長短期記憶人工神經(jīng)網(wǎng)絡(luò)(LSTM)更好的效果。
雖然深度學(xué)習(xí)模型具有上述的優(yōu)點(diǎn),但也存在一些問題。例如,深度學(xué)習(xí)模型中的參數(shù)很多,需要大量的訓(xùn)練數(shù)據(jù),且得到的結(jié)果沒有可解釋性,一般不符合物理規(guī)律,這也導(dǎo)致它們的泛化能力較差。因此,近期有許多研究人員試圖將傳統(tǒng)物理模型和AI方法的優(yōu)點(diǎn)結(jié)合,提出能嵌入物理先驗(yàn)信息的AI模型。WANG等人提出了一種基于神經(jīng)網(wǎng)絡(luò)模型的元學(xué)習(xí)(MetaLearning)方法。該方法先用編碼器提取與時(shí)間無關(guān)的隱特征,再用預(yù)測器結(jié)合提取到的特征和過去的狀態(tài)做出預(yù)測,在預(yù)報(bào)溫度、湍流等具有復(fù)雜非線性規(guī)律的數(shù)據(jù)中取得了良好的效果,且模型本身具有更好的泛化能力,一定程度上緩解了數(shù)值方法對(duì)環(huán)境信息的依賴。此外,也有學(xué)者嘗試用高斯過程來建模動(dòng)態(tài)規(guī)律。
高斯過程方法不需要大量的數(shù)據(jù),比深度學(xué)習(xí)模型具有更好的可解釋性,但建模與優(yōu)化更加困難。另外,目前很少有研究工作通過神經(jīng)網(wǎng)絡(luò)的時(shí)序建模反向揭示海洋時(shí)間演化過程的物理機(jī)理。這將是未來有趣的研究課題。
二、人工智能輔助的海洋探測技術(shù)
海洋立體觀測的一個(gè)重要目的是實(shí)現(xiàn)水下目標(biāo)的探測。由于電磁波在水下衰減較快,目前水下信息的傳遞主要依賴聲波這一載體。水聲目標(biāo)探測技術(shù)主要利用聲學(xué)的手段,通過接收目標(biāo)輻射噪聲或者散射回波,在一定范圍內(nèi)實(shí)現(xiàn)對(duì)目標(biāo)的檢測、識(shí)別、定位與跟蹤。水聲目標(biāo)探測技術(shù)是水聲信號(hào)處理與聲吶領(lǐng)域的重要研究方向,是環(huán)境感知、目標(biāo)監(jiān)測、資源勘探、情報(bào)收集等海洋應(yīng)用領(lǐng)域的核心技術(shù)之一,一直是國內(nèi)外研究學(xué)者重點(diǎn)關(guān)注的熱點(diǎn)問題。探測的過程一般包括:①根據(jù)接收信號(hào)檢測、識(shí)別目標(biāo);②對(duì)目標(biāo)進(jìn)行定位,下面分別進(jìn)行討論。
⒈水下目標(biāo)檢測與識(shí)別
根據(jù)工作方式,水下目標(biāo)檢測與識(shí)別技術(shù)可以分為主動(dòng)和被動(dòng)2種。
⑴主動(dòng)目標(biāo)檢測與識(shí)別技術(shù)
主動(dòng)目標(biāo)檢測與識(shí)別是指通過在航行中不斷主動(dòng)地發(fā)射聲吶信號(hào)并接收目標(biāo)的散射回波來實(shí)現(xiàn)目標(biāo)檢測與識(shí)別的技術(shù)。在執(zhí)行信號(hào)檢測與識(shí)別前,通常需要使用匹配濾波器(MF)濾除噪聲。然而,水下環(huán)境錯(cuò)綜復(fù)雜,一些粗糙表面或其他能散射聲波的物質(zhì)也可能散射出與目標(biāo)信號(hào)相似的信號(hào),即便使用匹配濾波器也難以去除。為了解決這個(gè)問題,傳統(tǒng)方法例如恒虛警率(CFAR)通過將接收到的信號(hào)強(qiáng)度與設(shè)置的閾值進(jìn)行比較來實(shí)現(xiàn)目標(biāo)的檢測與識(shí)別。然而,該算法的缺點(diǎn)是存在外界干擾時(shí)容易出現(xiàn)虛警或漏警,導(dǎo)致魯棒性差和識(shí)別率低。且設(shè)定閾值后也可能存在剩余多個(gè)目標(biāo)的情況,需要專家借助頻譜等信息進(jìn)行進(jìn)一步的人工識(shí)別。另外,由于受海洋水體介質(zhì)的非均勻性以及海洋獨(dú)特的動(dòng)力特性的影響,水聲場呈現(xiàn)出復(fù)雜的時(shí)空隨機(jī)起伏、環(huán)境不確定、信道不確實(shí)、參數(shù)不確知等特點(diǎn),傳統(tǒng)的主動(dòng)目標(biāo)檢測與識(shí)別方法在水下很難取得較好的效果,難以滿足現(xiàn)實(shí)需求,亟待發(fā)展水聲目標(biāo)檢測與識(shí)別新概念、新原理、新方法。如何利用淺海信道、背景干擾和目標(biāo)信號(hào)特征,提高主動(dòng)檢測與識(shí)別技術(shù)的穩(wěn)健性和準(zhǔn)確性是研究的重點(diǎn)。
近年來,深度學(xué)習(xí)等人工智能技術(shù)的快速發(fā)展,為主動(dòng)檢測與識(shí)別技術(shù)智能化發(fā)展提供了契機(jī)。具體而言,深度學(xué)習(xí)能充分利用數(shù)據(jù)的結(jié)構(gòu),從聲吶圖像中更好地提取非線性特征,從而實(shí)現(xiàn)更高的分類準(zhǔn)確率。GORMAN等人首次將多層感知機(jī)(MLP)應(yīng)用于水下目標(biāo)分類,取得了比人工識(shí)別和基于最鄰近分類器更好的效果。相比多層感知機(jī),研究表明CNN在處理圖像數(shù)據(jù)時(shí)具有獨(dú)特的優(yōu)勢。基于CNN的水下目標(biāo)識(shí)別算法實(shí)現(xiàn)了較高的識(shí)別準(zhǔn)確度和可靠性。另外,還有學(xué)者在水下目標(biāo)檢測與識(shí)別任務(wù)中引入其他的深度學(xué)習(xí)模型。例如,SEOK等人利用多角度傳感信息,結(jié)合傅里葉變換和深度信念網(wǎng)絡(luò)(DBN),提出了一種可以利用三維高光分布的目標(biāo)原型的聲吶分類算法,并用實(shí)驗(yàn)證明了在用同樣特征提取方法時(shí)DBN比傳統(tǒng)的后向傳播(BP)網(wǎng)絡(luò)分類能力更好。TERAYAMA等人提出了一個(gè)基于生成對(duì)抗網(wǎng)絡(luò)(GAN)的逼真的圖像生成系統(tǒng)。該系統(tǒng)利用GAN學(xué)習(xí)聲吶和光學(xué)圖像之間的圖像到圖像的轉(zhuǎn)換,成功地從聲吶和夜間圖像生成逼真的白天圖像,幫助目標(biāo)識(shí)別。
然而,訓(xùn)練神經(jīng)網(wǎng)絡(luò)通常需要大量的帶標(biāo)記的數(shù)據(jù),但這在實(shí)際中是難以獲得的。為了解決訓(xùn)練數(shù)據(jù)不足的問題,有許多學(xué)者從不同的角度給出了解決方法。例如,有學(xué)者嘗試?yán)蒙疃葘W(xué)習(xí)的方法結(jié)合仿真數(shù)據(jù)生成逼真的數(shù)據(jù)。LEE等人在訓(xùn)練圖像準(zhǔn)備階段引入一種端到端的圖像合成方法。該方法利用水下仿真器的深度相機(jī)中獲取的基礎(chǔ)圖像,結(jié)合神經(jīng)網(wǎng)絡(luò)綜合的水下噪聲特性生成用于訓(xùn)練的數(shù)據(jù)集。也有學(xué)者使用在其他數(shù)據(jù)集上預(yù)訓(xùn)練的神經(jīng)網(wǎng)絡(luò),并結(jié)合少量實(shí)測數(shù)據(jù)對(duì)網(wǎng)絡(luò)進(jìn)行微調(diào)。
另外,使用不同的降維方法對(duì)原始數(shù)據(jù)進(jìn)行特征提取來降低輸入維度,從而降低網(wǎng)絡(luò)參數(shù)數(shù)量的方法也能緩解數(shù)據(jù)不足的問題,同時(shí)降低訓(xùn)練的難度。BYUN近期的研究工作探索了不同線性和非線性降維方法結(jié)合淺層神經(jīng)網(wǎng)絡(luò)在聲吶目標(biāo)分類任務(wù)的性能。BERNICE等人提出了一種基于二維Gabor小波的聲吶頻譜特征提取方法,并使用支持向量機(jī)(SVM)、隨機(jī)森林(RF)和神經(jīng)網(wǎng)絡(luò)3種常用的機(jī)器學(xué)習(xí)方法對(duì)提取的特征進(jìn)行分類,相比傳統(tǒng)方法具有更高的分類準(zhǔn)確性。
⑵被動(dòng)目標(biāo)檢測與識(shí)別技術(shù)
雖然主動(dòng)目標(biāo)檢測與識(shí)別技術(shù)可以獲得更高的機(jī)動(dòng)性,但考慮到設(shè)備成本與環(huán)境保護(hù),以噪聲檢測為手段的被動(dòng)檢測與識(shí)別方式依然是重要的水聲目標(biāo)探測體制。被動(dòng)目標(biāo)檢測與識(shí)別不主動(dòng)發(fā)出聲吶等探測信號(hào),而只依據(jù)目標(biāo)輻射的噪聲信號(hào)進(jìn)行目標(biāo)的分辨,具有隱蔽性高、探測距離遠(yuǎn)等優(yōu)點(diǎn)。隨著現(xiàn)代船舶工程技術(shù)的快速發(fā)展,現(xiàn)代艦船的輻射噪聲水平大幅降低,達(dá)到接近甚至低于海洋環(huán)境噪聲的水平。圖3展示了水下目標(biāo)噪聲性能的改善與目標(biāo)探測性能提高的關(guān)系趨勢。如何充分利用目標(biāo)信號(hào)在產(chǎn)生、傳播與接收過程的特征,排除環(huán)境噪聲的干擾,是被動(dòng)目標(biāo)檢測與識(shí)別亟待解決的關(guān)鍵科學(xué)難題。
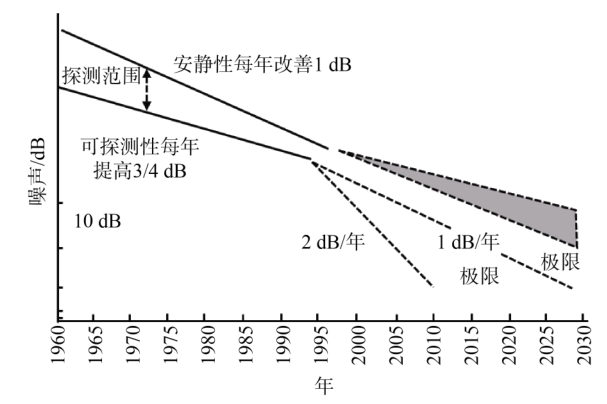 圖3 水下目標(biāo)噪聲性能的改善與目標(biāo)探測性能提高的關(guān)系趨勢
圖3 水下目標(biāo)噪聲性能的改善與目標(biāo)探測性能提高的關(guān)系趨勢
現(xiàn)有被動(dòng)目標(biāo)檢測與識(shí)別技術(shù)主要利用目標(biāo)輻射噪聲特性對(duì)目標(biāo)進(jìn)行區(qū)分。常見的被動(dòng)目標(biāo)檢測與識(shí)別方法包括基于噪聲能量積分的檢測法,低頻譜分析法(LOFAR)和基于噪聲包絡(luò)調(diào)制譜檢測法(DEMON)等。能量積分檢測常用于寬帶信號(hào)檢測,但該方法假設(shè)噪聲能量是已知的,這在實(shí)際中不一定總是能做到。LOFAR譜是由短時(shí)傅里葉變換(STFT)獲得的時(shí)–頻功率譜處理獲得,可以有效提取信號(hào)中的線譜分布特征。DEMON方法通過提取包絡(luò)譜得到目標(biāo)信息,具有提取特征穩(wěn)定、物理意義明確的優(yōu)點(diǎn)。然而,在降噪技術(shù)快速發(fā)展的背景下,這些傳統(tǒng)方法越來越難以區(qū)分環(huán)境噪聲和目標(biāo)輻射的噪聲,在信噪比較低時(shí)性能較差。
近年來,AI輔助的被動(dòng)目標(biāo)檢測與識(shí)別成為一個(gè)活躍的研究課題。SHIN等人開發(fā)了一種目標(biāo)識(shí)別器,定義并利用了目標(biāo)信號(hào)的多方面特征,以提高目標(biāo)檢測的準(zhǔn)確性。在處理步驟上,作者首先將原始數(shù)據(jù)投影到合適的低維特征空間,然后找出與判斷目標(biāo)是否存在最相關(guān)的特征向量,最后將這些特征向量輸入包括神經(jīng)網(wǎng)絡(luò)在內(nèi)的機(jī)器學(xué)習(xí)算法進(jìn)行目標(biāo)識(shí)別。該方法在低信噪比情況下性能比傳統(tǒng)方法更好。WANG等人融合了從多個(gè)領(lǐng)域提取的特征來識(shí)別不同的海洋噪聲源,例如船舶噪聲、海洋哺乳動(dòng)物的聲音和環(huán)境背景噪聲。他們的研究驗(yàn)證了Gammatone頻率倒譜系數(shù)(GFCC)比Mel頻率倒譜系數(shù)(MFCC)在海洋噪聲源分類任務(wù)中更具優(yōu)勢。此外,他們利用修改后的經(jīng)驗(yàn)?zāi)B(tài)分解來從時(shí)間序列信號(hào)中提取包含與復(fù)雜海洋噪聲源相關(guān)的各種信息的特征向量,并與GFCC融合作為深度神經(jīng)網(wǎng)絡(luò)的輸入向量。為了降低維度同時(shí)提升準(zhǔn)確率,高斯混合模型(GMM)被用來修改網(wǎng)絡(luò)的第1層以提取特征向量的統(tǒng)計(jì)特征。該方法與現(xiàn)有的通過使用簡單的分類器將MFCC與有限信息相結(jié)合的噪聲源分類方法相比,性能得到顯著提高。
⒉水下目標(biāo)定位
對(duì)目標(biāo)信號(hào)進(jìn)行檢測和分類,是獲取目標(biāo)位置的前提。下面從不同的角度介紹水下目標(biāo)定位的常用方法。
⑴波達(dá)方向估計(jì)
波達(dá)方向(DOA)問題廣泛存在于無線通信、雷達(dá)等領(lǐng)域,也是水下目標(biāo)探測的重要研究內(nèi)容之一。傳統(tǒng)DOA估計(jì)的代表方法包括多重信號(hào)分類法(MUSIC)和旋轉(zhuǎn)不變子空間(ESPIRT)。這些傳統(tǒng)方法在采樣率或信噪比較低時(shí)性能表現(xiàn)較差。實(shí)際上,DOA估計(jì)可以看成是從傳感器陣列獲得的稀疏采樣數(shù)據(jù)中重建信號(hào)的問題,因此可以用基于壓縮感知(CS)理論的方法解決。
近期,有許多研究提出基于壓縮感知的壓縮波束成形方法來解決DOA估計(jì)問題。它們相比傳統(tǒng)方法需要的觀測數(shù)據(jù)更少,且具有更高的分辨率,同時(shí)對(duì)噪聲有更強(qiáng)的魯棒性。然而,這些方法中權(quán)衡解的稀疏性和數(shù)據(jù)擬合程度的超參數(shù)需要根據(jù)具體的問題手動(dòng)調(diào)整到合適的值。為了避免超參數(shù)的調(diào)整,有許多研究引入機(jī)器學(xué)習(xí)中的稀疏貝葉斯學(xué)習(xí)(SBL)方法。例如,GERSTOFT等人基于SBL提出了一種用于求解多測量向量(MMV)問題的方法,同時(shí)結(jié)合最大后驗(yàn)估計(jì)(MAP)獲得了高分辨的DOA估計(jì)。另外,GERSTOFT等人還討論了如何用SBL方法來估計(jì)非平穩(wěn)噪聲情況下的源信號(hào)、噪聲能量以及目標(biāo)DOA。
水下方位估計(jì)面臨的另一難點(diǎn)是如何對(duì)抗環(huán)境的不確實(shí)性。最近的研究工作通過魯棒機(jī)器學(xué)習(xí)與陣列信號(hào)處理的交叉研究,創(chuàng)新性地提出基于最小統(tǒng)計(jì)距離(如Bhattacharyya距離)的方位估計(jì)器,通過理論分析與海試驗(yàn)證說明其在魯棒性、分辨力與準(zhǔn)確度上的顯著優(yōu)勢。
⑵水下聲源定位
另一種水下目標(biāo)定位的方法為匹配場處理(MFP)。它根據(jù)在海洋波導(dǎo)中傳播的信號(hào)場定位目標(biāo)的范圍、深度和方位。得益于近年來聲傳播模型仿真能力的提升,MFP方法發(fā)展迅速。然而,該方法要求準(zhǔn)確的關(guān)于環(huán)境的先驗(yàn)信息,這在實(shí)際復(fù)雜多變的海洋環(huán)境中通常難以獲取。數(shù)據(jù)驅(qū)動(dòng)的機(jī)器學(xué)習(xí)方法可以直接從觀測數(shù)據(jù)中學(xué)習(xí)特征,為解決這個(gè)問題提供了新的思路。
將機(jī)器學(xué)習(xí)方法應(yīng)用于水下聲源定位開始于20世紀(jì)90年代。最初的研究包括使用模擬或測量數(shù)據(jù)訓(xùn)練層數(shù)較少的前饋神經(jīng)網(wǎng)絡(luò)(FNN),來區(qū)分水下聲源的范圍和深度信息。隨著機(jī)器學(xué)習(xí)的發(fā)展和算力的提升,更復(fù)雜的數(shù)據(jù)和更先進(jìn)的方法被引入。NIU等人將海洋波導(dǎo)源定位看作監(jiān)督學(xué)習(xí)中的回歸以及分類問題,提出了用監(jiān)督學(xué)習(xí)來進(jìn)行目標(biāo)探測的方法,用深度前饋神經(jīng)網(wǎng)絡(luò)、支持向量機(jī)和隨機(jī)森林進(jìn)行水下目標(biāo)的定位。在此基礎(chǔ)上,WANG等人提出一種廣義的回歸神經(jīng)網(wǎng)絡(luò),緩解了前饋神經(jīng)網(wǎng)絡(luò)對(duì)參數(shù)和網(wǎng)絡(luò)結(jié)構(gòu)敏感的問題,相比傳統(tǒng)的前饋神經(jīng)網(wǎng)絡(luò)和匹配場處理具有更優(yōu)異的性能。
前面的方法可以判斷一個(gè)目標(biāo)信號(hào)是否存在于觀察到的信號(hào)中,而實(shí)際可能存在多個(gè)需要探測的目標(biāo)。針對(duì)多目標(biāo)探測的問題,LIU等人使用具有門控循環(huán)單元(GRU)的神經(jīng)網(wǎng)絡(luò),提出了一種可以自動(dòng)估計(jì)源目標(biāo)個(gè)數(shù)的多目標(biāo)探測方法。OZANICH等人針對(duì)源數(shù)量未知的DOA估計(jì)問題提出了一種基于非線性FNN的方法。他們將傳統(tǒng)波束形(CBF)重述為一個(gè)在參數(shù)空間的實(shí)值的線性逆問題,并用SVM或訓(xùn)練好的FNN求解,在更少的時(shí)間內(nèi)達(dá)到了和SBL方法相似的性能。
三、結(jié)束語
隨著海洋科技的不斷發(fā)展,世界各國獲取海洋數(shù)據(jù)的能力大幅提升,海洋信息領(lǐng)域逐步邁入大數(shù)據(jù)時(shí)代。
然而,傳統(tǒng)海洋信息處理技術(shù)無法充分利用觀測數(shù)據(jù)的深層知識(shí),支持下游任務(wù)。如何面向日益先進(jìn)的海洋立體觀測體系,充分利用數(shù)量與質(zhì)量顯著提升的海洋觀測數(shù)據(jù),邁向“數(shù)據(jù)與模型雙驅(qū)動(dòng)”的海洋觀測與探測新范式,具有重要的研究意義。為實(shí)現(xiàn)這一目標(biāo),AI的快速發(fā)展提供了新的研究思路。目前,AI輔助的海洋立體觀測和探測受到國內(nèi)外學(xué)者的廣泛關(guān)注,取得了一定的研究成果,但也存在一定的問題。
該領(lǐng)域的關(guān)鍵問題及其發(fā)展趨勢包括:
⑴當(dāng)前觀測體系獲取的數(shù)據(jù)在深海立體區(qū)域內(nèi)通常是稀疏、不確實(shí)的,且具有不同的分辨率。如何根據(jù)已有的觀測數(shù)據(jù)快速、準(zhǔn)確、高分辨地重建在時(shí)空上動(dòng)態(tài)變化的海洋物理場,是海洋立體觀測亟待解決的關(guān)鍵問題。尋找高表示力與高泛化力的數(shù)學(xué)模型,結(jié)合海洋動(dòng)力學(xué)的物理規(guī)律和從歷史或仿真數(shù)據(jù)中學(xué)習(xí)的深層知識(shí),利用張量模型、高斯過程與神經(jīng)網(wǎng)絡(luò)等AI方法的優(yōu)勢,探索海洋物理場最優(yōu)建模理論與重建方法,是重要的研究方向。
⑵在水下環(huán)境復(fù)雜多變,艦船等目標(biāo)輻射噪聲逐年降低的背景下,如何從接收信號(hào)中準(zhǔn)確檢測和識(shí)別目標(biāo)信號(hào)一直是水下目標(biāo)探測的難點(diǎn)問題。深度學(xué)習(xí)方法可以建模復(fù)雜的非線性和動(dòng)態(tài)特性,能有效提取目標(biāo)特征并進(jìn)行分類,是解決上述問題的有效方法。但深度學(xué)習(xí)方法需要大量的訓(xùn)練數(shù)據(jù),且得到的解一般不符合物理規(guī)律。結(jié)合傳統(tǒng)方法和深度學(xué)習(xí)優(yōu)點(diǎn),在深度學(xué)習(xí)模型中嵌入物理知識(shí),是重要的研究課題。另外,在水下目標(biāo)探測中,有目標(biāo)的樣本量遠(yuǎn)小于沒有目標(biāo)的樣本量,造成了訓(xùn)練集的極度不平衡,探索非平衡小樣本數(shù)據(jù)集下高泛化能力的模型訓(xùn)練技術(shù)也是未來的重要研究內(nèi)容。
⑶當(dāng)前水下目標(biāo)定位方法通常需要準(zhǔn)確的關(guān)于環(huán)境的先驗(yàn)信息,但這在實(shí)際中通常是難以獲取的。如何克服對(duì)環(huán)境信息的依賴,同時(shí)對(duì)抗環(huán)境的不確定性和噪聲,是水下目標(biāo)定位的重點(diǎn)難題。一種可行方法是將傳統(tǒng)信號(hào)處理模型與魯棒的AI方法結(jié)合起來,從而提升定位的魯棒性和準(zhǔn)確性。
責(zé)任編輯:彭菁
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7134瀏覽量
89410 -
人工智能
+關(guān)注
關(guān)注
1795文章
47642瀏覽量
239703 -
信息系統(tǒng)
+關(guān)注
關(guān)注
0文章
208瀏覽量
20488
原文標(biāo)題:人工智能輔助的海洋立體觀測與探測
文章出處:【微信號(hào):AI智勝未來,微信公眾號(hào):AI智勝未來】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論