") Wheel-SLAM:低成本輪式IMU的SLAM系統(tǒng)
Wheel-SLAM:低成本輪式IMU的SLAM系統(tǒng)
摘要
移動(dòng)機(jī)器人需要一種對(duì)環(huán)境干擾具有魯棒性的可靠位姿估計(jì)器,為此,慣性測(cè)量單元(IMU)發(fā)揮了重要作用,因?yàn)樗鼈兛梢元?dú)立感知車輛的全運(yùn)動(dòng)狀態(tài)。然而,由于固有的噪聲和偏置不穩(wěn)定性,它會(huì)出現(xiàn)累積誤差,尤其是對(duì)于低成本傳感器。在我們之前對(duì) Wheel-INS的研究中,本文提出通過在機(jī)器人的輪子上安裝 IMU 以利用旋轉(zhuǎn)調(diào)制來限制純慣性導(dǎo)航系統(tǒng) (INS) 的漂移誤差。但是,由于缺乏外部校正信號(hào),它仍然在很長(zhǎng)一段時(shí)間內(nèi)漂移。
在這篇文章中利用 Wheel-INS 的環(huán)境感知能力來實(shí)現(xiàn)僅使用一個(gè) IMU 的同時(shí)定位和建圖 (SLAM)。具體來說,我們使用路堤角度作為地形特征,以使用 Rao-Blackwellized 粒子濾波器實(shí)現(xiàn)閉環(huán),根據(jù)粒子維護(hù)的網(wǎng)格圖中的機(jī)器人位置,對(duì)路堤角度進(jìn)行采樣和存儲(chǔ),根據(jù)當(dāng)前估計(jì)的滾動(dòng)序列與地形圖之間的差異更新粒子的權(quán)重。實(shí)驗(yàn)表明,使用機(jī)器人滾動(dòng)角估計(jì)在 WheelINS 中執(zhí)行 SLAM 的想法是可行的。此外,定位精度比 Wheel-INS 顯著提高(超過 30%) 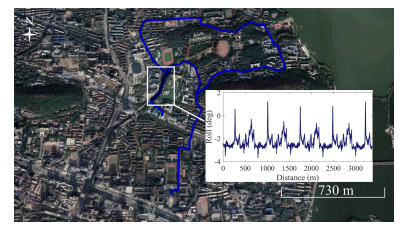
圖1. 我們之前的工作[1]中的車輛實(shí)驗(yàn)中的車輛橫滾估計(jì)和測(cè)試軌跡。在標(biāo)記的區(qū)域內(nèi),車輛一直往返盤旋。可以觀察到相應(yīng)的機(jī)器人橫滾角估計(jì)(表示道路傾斜角)顯示出一個(gè)可以利用的重復(fù)模式,可以用來進(jìn)行環(huán)路閉合檢測(cè)和修正。
主要貢獻(xiàn)
提出并實(shí)現(xiàn)了一種Wheel-IMU 使用地形特征(由 Wheel-IMU 測(cè)量)的 SLAM 系統(tǒng)。
通過廣泛的現(xiàn)場(chǎng)實(shí)驗(yàn)說明了利用機(jī)器人滾動(dòng)角估計(jì)來實(shí)現(xiàn)閉環(huán)以有效限制Wheel-INS中的誤差漂移的可行性。
據(jù)我們所知,這是文獻(xiàn)中第一個(gè)只為輪式機(jī)器人使用一個(gè)低成本輪式 IMU 的 SLAM 系統(tǒng)。
相關(guān)工作
背景
Wheel-INS [1] 是 Wheel-SLAM 的基礎(chǔ),用于提供機(jī)器人里程計(jì)和橫滾角估計(jì),Wheel-INS 有兩個(gè)主要優(yōu)點(diǎn)。首先,輪速可以通過陀螺儀輸出和輪半徑計(jì)算,實(shí)現(xiàn)與只使用一個(gè) IMU(無其他傳感器)的 ODO/INS 相同的信息融合。其次,它可以利用旋轉(zhuǎn)調(diào)制來限制 INS 的誤差漂移。由于空間限制,我們?cè)谶@里僅概述 Wheel-INS 的算法。圖2描述了 Wheel-IMU 的安裝和相關(guān)坐標(biāo)系的定義。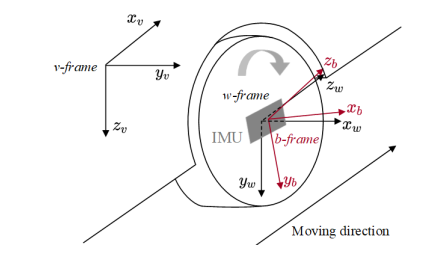
圖2. Wheel-IMU的安裝方案以及車輛框架(v-frame)、車輪框架(w-frame)和IMU本體框架(b-frame)的定義
Wheel-INS 的系統(tǒng)概述如圖3所示,首先,執(zhí)行前向 INS 機(jī)械化來預(yù)測(cè)機(jī)器人狀態(tài),同時(shí),使用 Wheel-IMU x 軸的陀螺儀輸出計(jì)算輪速,然后,將此車輛速度視為帶有非完整約束(NHC)的外部觀測(cè),并通過誤差狀態(tài)擴(kuò)展卡爾曼濾波器(EKF)來更新狀態(tài)。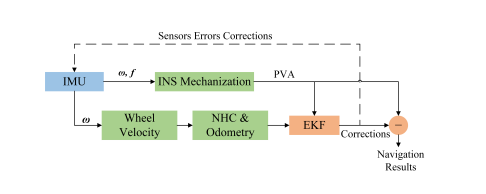
圖3. Wheel-INS的概述,ω和f分別代表Wheel-IMU測(cè)量的角速度和特定力;PVA表示W(wǎng)heel-IMU的位置、速度和姿態(tài)。我們使用Wheel-IMU的輸出來進(jìn)行INS運(yùn)算以預(yù)測(cè)機(jī)器人狀態(tài)(PVA)。在Wheel-IMU的x軸上測(cè)量的角速度和輪半徑被用來計(jì)算前進(jìn)速度。這個(gè)速度被作為一個(gè)帶有非完整約束的三維速度觀測(cè)值,通過EKF來更新機(jī)器人狀態(tài)以及校正慣性傳感器的誤差,例如陀螺儀偏差。
動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)
粒子濾波是一種序列蒙特卡羅方法,其基本思想是使用重要性抽樣和離散隨機(jī)測(cè)量近似概率分布的概念,遞歸計(jì)算相關(guān)概率分布。在粒子濾波中,機(jī)器人狀態(tài)的后驗(yàn)分布由一組粒子表示,這些粒子隨著新信息的融合而遞歸地演化。基于Rao-Blackwellization技術(shù),Wheel-SLAM將SLAM問題分解為機(jī)器人定位問題和地形映射問題,其取決于機(jī)器人位姿估計(jì)。Wheel-SLAM算法包括四個(gè)主要步驟: 1)通過運(yùn)動(dòng)模型對(duì)機(jī)器人狀態(tài)進(jìn)行采樣; 2)更新地形圖; 3)一旦確定了閉環(huán),則更新粒子權(quán)重; 4)在必要時(shí)對(duì)粒子進(jìn)行重采樣。 算法1概述了Wheel-SLAM的流程。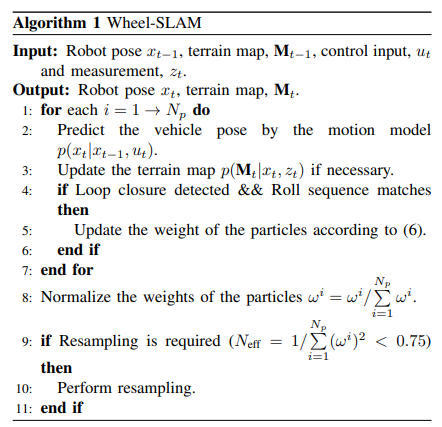
網(wǎng)格地形圖的構(gòu)建
與FootSLAM中使用的六邊形網(wǎng)格地圖相比,由于機(jī)器人的運(yùn)動(dòng)模式相對(duì)簡(jiǎn)單,我們將網(wǎng)格簡(jiǎn)化為正方形,由于我們假設(shè)車輛在水平平面上移動(dòng),因此我們構(gòu)建一個(gè)二維網(wǎng)格地圖,每個(gè)網(wǎng)格包含Wheel-INS在該位置估計(jì)的相應(yīng)道路傾斜角度,圖4說明了構(gòu)建的網(wǎng)格地圖及機(jī)器人位姿演化。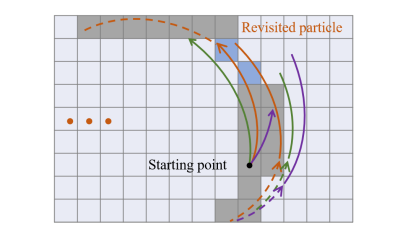
圖4. 網(wǎng)格地圖的構(gòu)建和回訪識(shí)別的示意圖,不同顏色的曲線表示由不同粒子采樣的機(jī)器人路徑,灰色網(wǎng)格已經(jīng)被機(jī)器人訪問過,因此它們具有道路側(cè)傾角度估計(jì),一旦一個(gè)粒子檢測(cè)到機(jī)器人已經(jīng)連續(xù)返回訪問過的網(wǎng)格(藍(lán)色),則會(huì)報(bào)告一個(gè)潛在的回環(huán),并進(jìn)行進(jìn)一步的檢查。
粒子權(quán)重更新
一開始,所有粒子都被賦予相同的權(quán)重,當(dāng)機(jī)器人移動(dòng)時(shí),每個(gè)粒子都有不同的軌跡和地形圖,為了確保環(huán)路閉合的可靠性并減少異常值的影響,我們?cè)O(shè)定了三個(gè)標(biāo)準(zhǔn)。首先,環(huán)路閉合需要在長(zhǎng)度為 Nr 的窗口內(nèi)被機(jī)器人位置連續(xù)檢測(cè)到。其次,我們使用 Pearson 相關(guān)系數(shù) [19] 計(jì)算 Nr 個(gè)滾動(dòng)序列匹配分?jǐn)?shù),并將它們與閾值 Cthr 進(jìn)行比較。在這個(gè) Nr 窗口中,至少需要有 Nthr個(gè)系數(shù)大于 Cthr。第三,當(dāng)前位置的相關(guān)系數(shù)需要大于閾值。如果滿足所有三個(gè)要求,我們認(rèn)為它是一個(gè)真正的環(huán)路閉合,隨后按一定的方式更新粒子權(quán)重。
實(shí)驗(yàn)描述
為了證明所提出的Wheel-SLAM系統(tǒng)的可行性和有效性,我們?cè)谖錆h大學(xué)校園內(nèi)使用一輛汽車進(jìn)行了五組現(xiàn)場(chǎng)測(cè)試。該汽車裝有一個(gè)Wheel-IMU和參考系統(tǒng),以提供車輛姿態(tài)的真實(shí)值,如圖5所示。測(cè)試中車輛運(yùn)動(dòng)的特性如表I所示。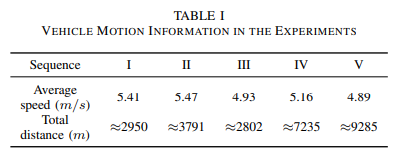
兩個(gè)MEMS IMU和高端IMU的主要技術(shù)參數(shù)列在表II中,其中ARW表示角隨機(jī)游走;Acc.表示加速度計(jì);VRW表示速度隨機(jī)游走。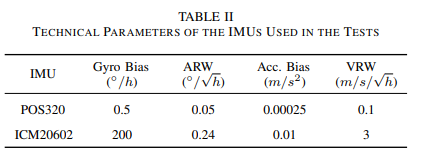
圖6展示了五個(gè)實(shí)驗(yàn)軌跡。汽車開始移動(dòng)之前的靜態(tài)IMU數(shù)據(jù)用于獲得Wheel-IMU的初始橫滾和俯仰角以及陀螺儀偏差的初始值,其他慣性傳感器誤差設(shè)為零。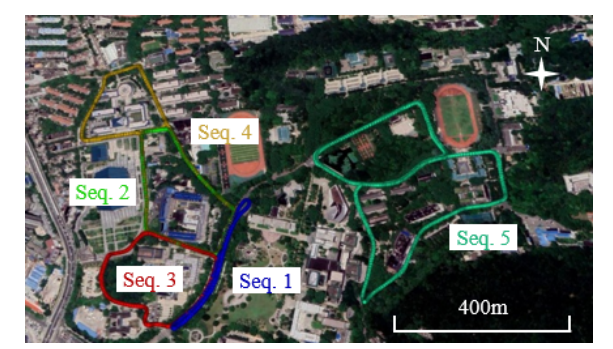
圖6. 實(shí)驗(yàn)軌跡。Seq. 1、Seq. 2 和 Seq. 3 是環(huán)形軌跡,車輛在一個(gè)方向上移動(dòng)了多次,而 Seq. 4 和 Seq. 5 是更為復(fù)雜的軌跡,在大規(guī)模環(huán)境中車輛不僅沿著同一車道同一方向行駛,還沿著同一條道路相反的方向行駛。
實(shí)驗(yàn)中設(shè)置的Wheel-SLAM的關(guān)鍵參數(shù)列在表III中,標(biāo)準(zhǔn)差在表III中表示為STD。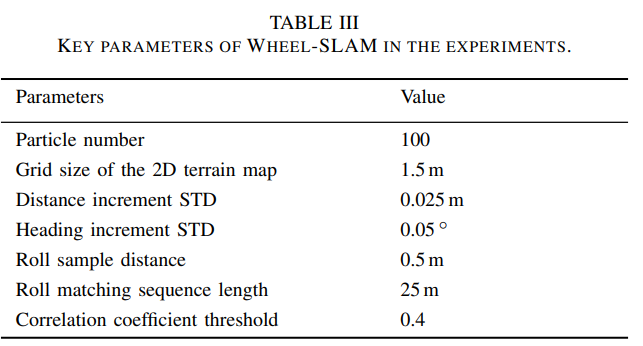
性能比較與分析
1)性能比較:圖7分別比較了五個(gè)實(shí)驗(yàn)中Wheel-SLAM和Wheel-INS的定位誤差和航向誤差。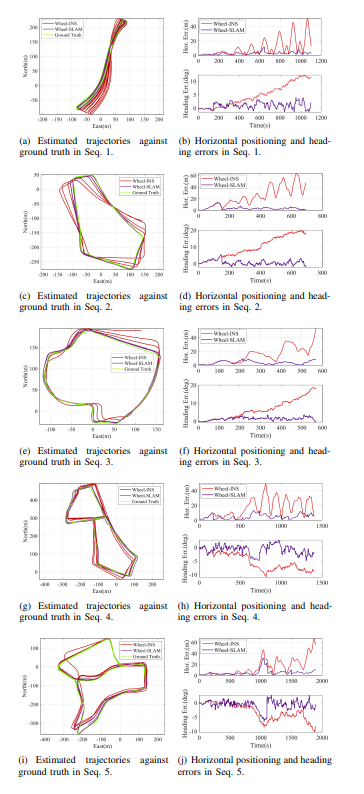
圖7. 在所有五個(gè)實(shí)驗(yàn)中,Wheel-INS和Wheel-SLAM的估計(jì)軌跡及相應(yīng)的水平位置誤差和航向誤差的比較。
圖8展示了Wheel-SLAM在Seq. 1,Seq. 2和Seq. 4中構(gòu)建的地形圖,由于車輛輪胎直接接觸地面,所以制圖不受車輛懸架系統(tǒng)的影響,特別是當(dāng)車輛機(jī)動(dòng)性大時(shí),這種影響尤為明顯,這也是在車體上安裝IMU時(shí)的情況。此外,這些地圖可以用于提供有價(jià)值的信息,以監(jiān)測(cè)道路的變形和劣化情況。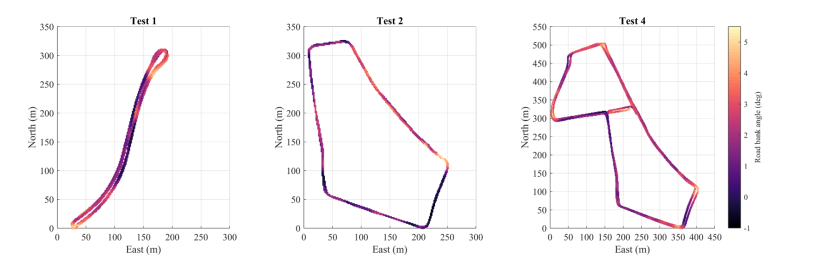
圖8. Wheel-SLAM在Seq. 1、Seq. 2和Seq. 4中估計(jì)的地形地圖。顏色表示道路傾角的值。道路傾角越大,顏色越淺。
2)Wheel-SLAM特性分析:為了進(jìn)一步評(píng)估Wheel-SLAM的性能和穩(wěn)定性,我們?cè)O(shè)置不同的粒子數(shù)來比較其定位性能。該算法每個(gè)配置運(yùn)行100次。圖9顯示了結(jié)果。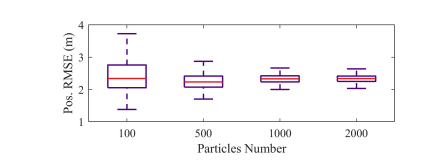
圖9. 在Seq. 1中,使用不同粒子數(shù)的Wheel-SLAM的定位RMSE。
討論
Wheel-SLAM的核心原則可以總結(jié)如下:
1)粒子擴(kuò)散以對(duì)機(jī)器人的可能狀態(tài)進(jìn)行采樣,并通過每個(gè)粒子維護(hù)的軌跡檢測(cè)環(huán)路閉合;
2)道路坡度角序列匹配結(jié)果用于更新粒子權(quán)重,以挑選出最可信的粒子。
在Wheel-SLAM中發(fā)揮核心作用的是滾動(dòng)序列匹配策略。它必須足夠穩(wěn)健,以保留突出的粒子同時(shí)過濾掉虛警。因此,我們采用了相當(dāng)嚴(yán)格的環(huán)路閉合檢測(cè)標(biāo)準(zhǔn),使環(huán)路閉合檢測(cè)具有魯棒性。
然而,可以意識(shí)到,在應(yīng)用Wheel-SLAM時(shí)存在兩個(gè)主要限制。首先,機(jī)器人必須嚴(yán)格重新訪問以前的地方,并具有一定的長(zhǎng)度,這不像基于視覺的SLAM,其中車輛通過使用外部感知傳感器(例如相機(jī)和LiDAR)具有遠(yuǎn)程感知能力,在Wheel-SLAM中,Wheel-IMU用于提取地形特征,這些特征只能通過機(jī)器人的精確到達(dá)來獲取,其次,環(huán)路閉合的成功取決于道路坡度角序列的匹配,如果機(jī)器人在極其平滑的道路上行駛,沒有任何坡度角的波動(dòng),那么很難檢測(cè)到環(huán)路閉合。
總結(jié)
在本研究中,我們提出了一種利用單個(gè)輪式慣性測(cè)量單元(Wheel-IMU)執(zhí)行同時(shí)定位與地圖構(gòu)建(SLAM)的方法,通過利用Wheel-IMU的環(huán)境感知能力,具體而言,我們通過從機(jī)器人的橫滾角估計(jì)中提取地形特征來啟用環(huán)路閉合檢測(cè),從而將我們之前的Wheel-INS方法擴(kuò)展為Wheel-SLAM。系統(tǒng)采用了Rao-Blackwellized粒子濾波器,每個(gè)粒子維護(hù)其自己的機(jī)器人狀態(tài)和柵格地圖。實(shí)驗(yàn)結(jié)果表明,所提出的方法能夠有效抑制Wheel-INS的誤差漂移,相對(duì)于Wheel-INS,定位和方向精度平均提高了52.6%和53.2%。
然而,Wheel-SLAM有兩個(gè)主要限制,首先,需要一定程度的道路沿角變化。其次,機(jī)器人必須準(zhǔn)確回到同一地點(diǎn),Wheel-SLAM適用于那些在給定區(qū)域內(nèi)重復(fù)移動(dòng)的機(jī)器人,例如清掃機(jī)器人和在受限區(qū)域內(nèi)巡邏的機(jī)器人, 未來研究方向包括將Wheel-SLAM與其他外部感知傳感器(例如相機(jī)和LiDAR)集成,以提高機(jī)器人導(dǎo)航系統(tǒng)的穩(wěn)健性和適用性。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2552文章
51233瀏覽量
754724 -
濾波器
+關(guān)注
關(guān)注
161文章
7846瀏覽量
178404 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
764瀏覽量
33585 -
SLAM
+關(guān)注
關(guān)注
23文章
425瀏覽量
31863 -
IMU
+關(guān)注
關(guān)注
6文章
315瀏覽量
45805
原文標(biāo)題:Wheel-SLAM:低成本輪式 IMU 的 SLAM 系統(tǒng)
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
SLAM技術(shù)的應(yīng)用及發(fā)展現(xiàn)狀
SLAM技術(shù)目前主要應(yīng)用在哪些領(lǐng)域
激光SLAM與視覺SLAM有什么區(qū)別?
激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么
基于視覺的slam自動(dòng)駕駛
SLAM的相關(guān)知識(shí)點(diǎn)分享
請(qǐng)問如何理解SLAM用到的傳感器輪式里程計(jì)IMU、雷達(dá)、相機(jī)的工作原理?
HOOFR-SLAM的系統(tǒng)框架及其特征提取
單目視覺SLAM仿真系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
一種低成本、高精度的激光雷達(dá)輔助視覺SLAM系統(tǒng)

SLAM的原理 手持SLAM的優(yōu)缺點(diǎn)講解
視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論