 光學三維形貌測量概述
光學三維形貌測量概述
技術背景
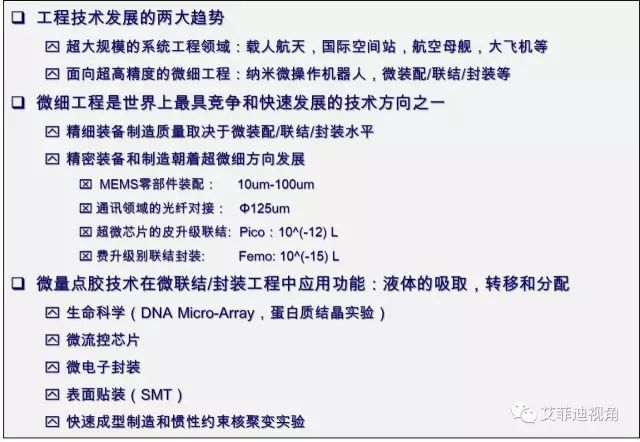
物體三維形貌提供豐富直觀的信息,在現代工業與生活中許多領域有廣泛的應用。的非接觸三維測量有著廣泛的應用。經典的外觀幾何測量諸如長度,角度,平面度,直線度等的測量技術一般采用接觸式測試(比如三次元測量等設備)。隨著產業工業發展,產品復雜程度加大,特別是復雜物體外形數據的精確獲取,包括不規則自由曲面,,對傳統的接觸式測量提出了挑戰。另外,從工業技術發展的趨勢來看,一是超大規模的系統工程領域:載人航天,國際空間站,航空母艦,大飛機等;二是面向超高精度的微細工程:納米微操作機器人,微裝配/聯結/封裝等,其中微細工程是世界上最具競爭和快速發展的技術方向之一。
近年來,隨著工業4.0概念的推動,快速,實時獲取目標物外觀形貌的技術得到迅速發展,電子,光學,計算機技術的日趨成熟,以及人們在圖像處理,模式識別,人工智能技術領取取得了巨大成就。以工業化的CCD攝像為基礎的非接觸式三維輪廓測量成為研究重點。基于光學方法基礎上的三維測量技術具有無損,全場,快速,高分辨率和易于實現智能自動化的特點。
光學三維形貌測量概述
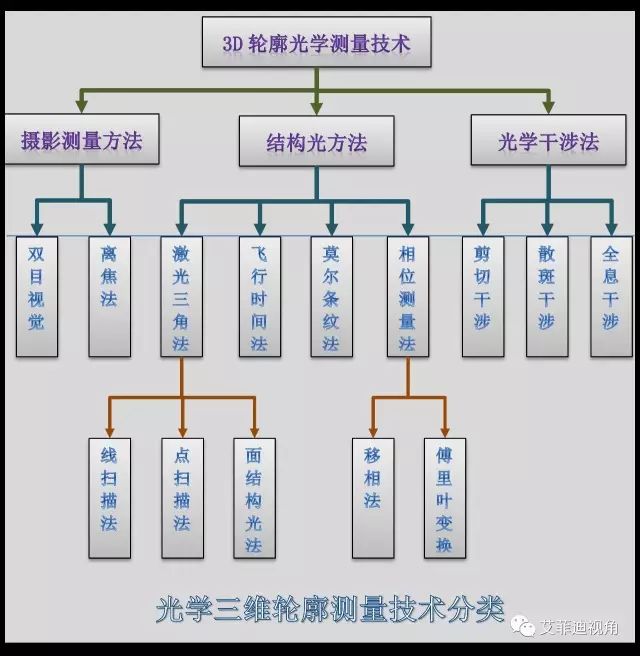
光學三維形貌測量時光學信息科學的主要研究領域,是目前工程應用最有發展前途的測量方法。因為其非接觸和全創測量的特點,在精密計量,機械制造,質量控制,生物醫學,人體測量和文物考古等方面得到廣泛應用。光學形貌測量是現代光學為基礎,融合電子學,計算機圖像處理,圖形學,信號處理等科學技術的應用技術,把通過被測目標調解后的光學圖像作為檢測和信息載體加以使用,從圖像中提取被測目標表面信息的一種方法,根據測量基本原理和實施方法可以分為攝影測量方法,結構光法,光學干涉方法。
攝影測量法(Photogrammetry)-雙目視覺法
攝影測量是基于多個視覺幾何級數的被動測量方法,在自然光照明情況下,從多個視角獲取物體圖像,然后根據獲取的圖像與攝像鏡頭角度的匹配,從而還原物體的三維結構形貌。
其中,雙目立體視覺法使用比較普遍。使用兩臺攝像機從設定角度對同一物體完成攝像,獲取兩幅圖像并調解出兩幅圖像中的對應特征點,根據三點同線原則,組立求解共線方程組完成圖像坐標到空間坐標的轉換從而實現三維形貌的確定。
該方法主要應用在軍事,地貌等測量環境,為解決測點圖像和視角的同態匹配問題,一般在被測物體表面放置標定點,從而精確標定算法,然后使用插值算法實現被測三維形貌恢復。
缺點:該方法測量精度一般比較低,數據運算量打,不適合精密測量,一般使用與目標識別,定位,以及位姿分析。
優點:類似于人類的眼睛體視功能,測量范圍大,測量系統結構簡單,數據采集快捷方便,不受物體顏色影響,在計算機視覺和自動識別系統領域有廣闊的應用背景
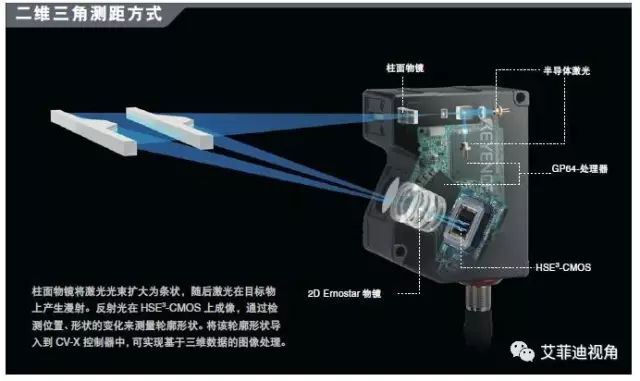
結構光法(Structured Light Method)-三角激光法
直接三角法包括激光三角法,光切法和全場結構光法。主要原理是利用光學中的著名的三角關系來實現物體高度的測量,目前該技術比較成熟。比如日本Keyence公司的光學測量器件主要采用三角法技術。目前大多數三維形貌測量技術都衍生于三角法測量技術。
根據掃描方式不同,包括點掃描激光三角法和線掃描技術,前者是目前較成熟的測量形貌和高度方法,典型的測量范圍在5mm到25mm,精度為萬分之一,測量頻率40KHz。一般用線性CCD或PSD記錄光斑位置,光斑位置的移動和物面高度相關,其尺寸大小及雜散光影響測量精度。三角測量法一般采用激光作為光源,測量范圍比較大,并能抑制噪聲。光切法是用線結構光代替單點結構光,實現表面的快速測量掃描。
激光三角法和光切法具有測量精度高,算法簡潔等優點,用于工業領域,并替代三坐標測量設備中的接觸式掃描探頭,實現物面三維形貌測量,缺點是單次測量獲取信息量小并且需要精密的掃描機構,測繪效率不高。為進一步提高測量速度和效率,現階段研究者提出利用面結構光投影代替點線結構光來實現物體形貌的全場測量。
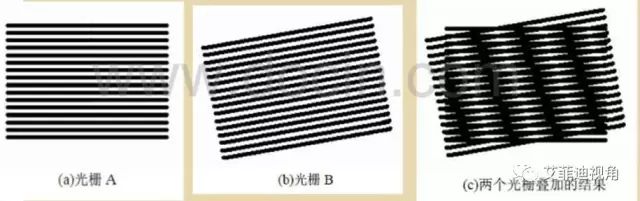
結構光法(Structured Light Method)-莫爾條紋法
所謂莫爾條紋指的是以透射光柵為例,當指示光柵上的線紋和標尺光柵上的線紋之間形成一個小角度θ,并且兩個光柵尺刻面相對平行放置時,在光源的照射下,位于幾乎垂直的柵紋上,形成明暗相間的條紋。這種條紋稱為“莫爾條紋”。嚴格地說,莫爾條紋排列的方向是與兩片光柵線紋夾角的平分線相垂直。莫爾條紋中兩條亮紋或兩條暗紋之間的距離稱為莫爾條紋的寬度
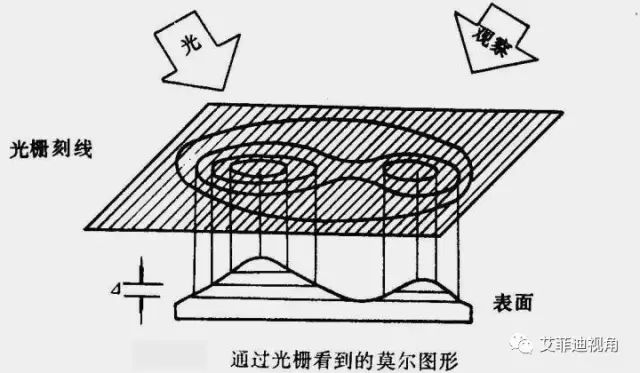
莫爾條紋輪廓測量法是上世紀70年代提出并發展起來的一種技術,基本原理是利用基準光柵與投影到三維物體表面上并受表面高度調制后的變形光柵重疊形成莫爾條紋,對莫爾條紋進行分析,從而得到三維表面輪廓的深度信息。其應用技術包括影像莫爾法,投影莫爾法,掃描莫爾法等幾種。為了使得莫爾條紋法應用于自動化測量,在系統中添加一機構,使得一塊基準光柵垂直于光柵線方向做微小移動,根據莫爾條紋同步移動的方向來自動判斷表面的凹凸。掃描式莫爾法則是使用電子掃描光柵和變形光柵像疊加生成莫爾登高線。利用現代電子技術,方便地改變掃描光柵珊距,相位,生成不同相位的莫爾等高線,實現大范圍測試。
目前莫爾輪廓測量主要用于工業檢測,人體輪廓檢測等,由于莫爾條紋輪廓法靈敏度不夠高,還不能滿足工業上的一些高精度測量要求,主要用在人體輪廓檢測,包括骨科,胸外科和整形外科方面。
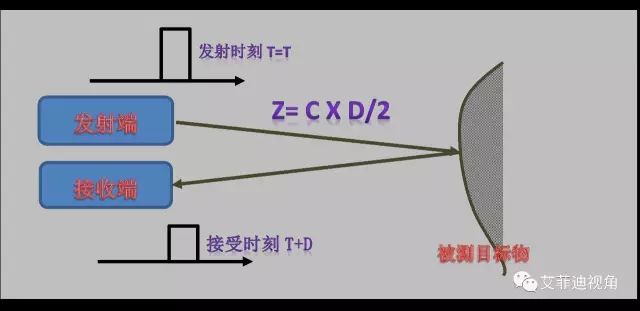
結構光法(Structured Light Method)-飛行時間法
結構光技術指的是利用具有特定幾何特性的結構光源照明物體,物體表面的輪廓特性對結構光產生調制特性,通過檢測到的調制光辨識出物體表面輪廓特性。根據所用結構光和測量原理區別分為時間調制和空間調制兩大類,其中飛行時間法是基于時間調制的方法
飛行時間法是利用光束在空間傳播時間進行測量,一個激光脈沖信號從發射端出發,經過物體表面漫反射后,幾乎沿著完全相同的路徑返回到接收端。檢測光脈沖從發射到接收之間的時間延遲,可以計算出被測物體表面到光脈沖發射端的距離。
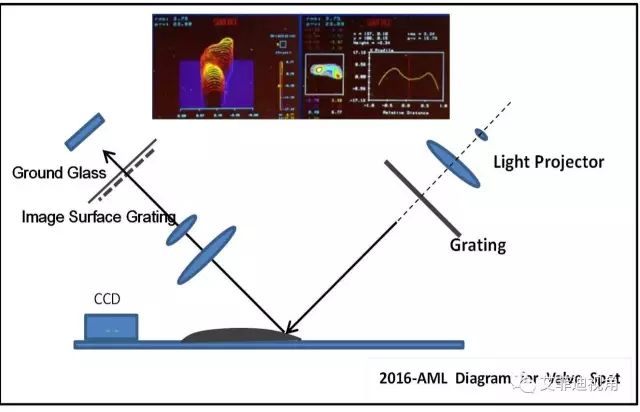
結構光法(Structured Light Method)-相位測量法
相位測量法是利用光柵投影并通過圖像分析得到精確測量的技術。通過相位測量,可以提高測量分辨率并對圖像信息深度挖據。相位測量是結構光技術和光學干涉測量相結合產生的測量方法。通過建立物體表面高度和投影到物體表面條紋相位的關系而獲得物體表面的三維信息。基于相位法的條紋投影三維系統結構簡單,并且具有全場高精度測量特點,成為目前最具潛力的三維形貌測量技術。
相位測量結構功能主要包括條紋投影實現,條紋相位的獲取,和相位高度關系定義三個部分,其中條紋相位計算的準確性直接影響后續測量的高度計算。
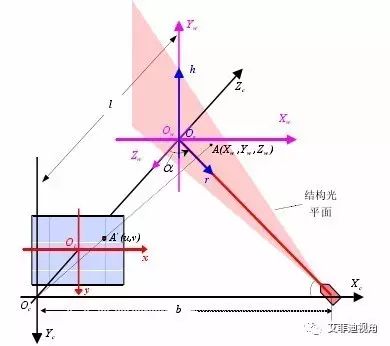
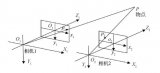
相位測量輪廓技術的原理
DO:投影光軸; CO:探測光軸
DC=d:軸間距,與平面平行
光軸到目標點E投影本來應該投影與B點, 由于被測表面形貌調制,在CCD成像在A點,AB=S(x,y)
H(x,y)=LS(x,y)/(d+S(x,y)
正玄光柵投影到待測物體表面,規定坐標原點O系統相位為零。采用4步相移技術(每步90度,利用CCD攝像獲得4幅畸變光柵條紋圖光強,利用光強關系計算E點相位,在利用光柵直接投影到參考面(XY平面)的光強關系,得到A點相位。
相位差:

當探測光軸高度L遠大于被測面高度,測點高度差為
根據條紋相位獲取方法的不同,相位測量法又分位移相位法和空間相位法。相移動法采用正弦光柵投影,通過獲取一個條紋周期內的多幅相移條紋圖像,計算物面投影條紋相位分布,從而計算獲取物面三維形貌特性。
優點:相移法中測得的物面每一點的相位值只與改點的光強度有關,對物面顏色及反射等引起的強度不均勻不銘感,測量精度高。
缺點:相移法需要采集多幅條紋圖像,測試速度慢,因此時間域相移法主要應用在不需要動態實時測量的場合。
空域相位法主要包括空域相移法,傅里葉變換法,蓋波變換法等。由于空域相移法只需要一幅或兩幅圖像就可計算條紋相位,數據量處理下,適合動態測量和實時監控。但不適合用于測量梯度變換較大的場合。
-
計算機
+關注
關注
19文章
7575瀏覽量
89136 -
三維
+關注
關注
1文章
514瀏覽量
29127 -
人工智能
+關注
關注
1800文章
48107瀏覽量
242265
原文標題:物面三維輪廓的光學測量技術簡介
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
革命性創新測量技術——數字全息術帶來實時3D形貌
新拓三維與韓國慶北大學聯合舉辦三維光學測量應用發展論壇
高反光表面三維形貌測量技術的介紹及未來展望
XTOM三維光學掃描測量系統畫冊
雙目三維光學測量硬件系統結構設計

顯微測量|光學3D表面輪廓儀微納米三維形貌一鍵測量





 工商網監
工商網監
評論