

引言
/Foreword
鑒于自動駕駛系統(tǒng)(Automated Driving System, ADS)和交通環(huán)境的復(fù)雜性以及安全事件的偶發(fā)性,自動駕駛系統(tǒng)需要安全、可靠地處理由外界和自身變化帶來的多種不確定性,才能有效保障智能網(wǎng)聯(lián)汽車安全合規(guī)地行駛,并逐步提升舒適性和智能性。因此,在智能網(wǎng)聯(lián)汽車開發(fā)設(shè)計(jì)流程中,測試驗(yàn)證評價(jià)是必不可少的環(huán)節(jié)——這需要基于智能網(wǎng)聯(lián)汽車的設(shè)計(jì)運(yùn)行條件(Operational Design Condition,ODC)、安全邊界及最小風(fēng)險(xiǎn)策略等,對自動駕駛功能開展全面的測試驗(yàn)證工作。[1]
為確保智能網(wǎng)聯(lián)汽車產(chǎn)品測試方案的可行性和測試結(jié)果的一致性,以及合理調(diào)配測試資源、有效降低測試成本,賽目科技參考國內(nèi)外相關(guān)法規(guī)和技術(shù)標(biāo)準(zhǔn),基于長期積累的智能網(wǎng)聯(lián)汽車測試經(jīng)驗(yàn),提出智能網(wǎng)聯(lián)汽車產(chǎn)品測試策略——構(gòu)建場景集,解決智能網(wǎng)聯(lián)汽車產(chǎn)品測試“測什么”的問題;提出智能網(wǎng)聯(lián)汽車測試場景和“三支柱”的匹配方法,解決智能網(wǎng)聯(lián)汽車產(chǎn)品測試“怎么測”的問題。
本系列文章將分上、下兩篇,分別闡釋賽目科技提出的測試策略研究如何解決智能網(wǎng)聯(lián)汽車測試“測什么”和“怎么測”兩個核心問題。
測什么?
場景集構(gòu)建!
對自動駕駛系統(tǒng)進(jìn)行測試,其目的是測試其在實(shí)際運(yùn)行過程中,面對各種工況下的安全性、合規(guī)性、舒適性、智能性等,因此自動駕駛系統(tǒng)測試的場景集應(yīng)至少能覆蓋系統(tǒng)的設(shè)計(jì)運(yùn)行條件,并充分考慮自動駕駛系統(tǒng)工況中可能出現(xiàn)的危險(xiǎn)場景和失效場景。基于此,賽目科技提出,應(yīng)通過多種來源構(gòu)建測試場景集,以確保智能網(wǎng)聯(lián)汽車測試的科學(xué)性、充分性,主要包括:標(biāo)準(zhǔn)法規(guī)類場景、預(yù)期功能安全場景以及實(shí)車采集數(shù)據(jù)轉(zhuǎn)換場景。通過以上多種分析途徑得到的場景作為ADS測試場景集的輸入,構(gòu)成ADS測試場景集。
1
標(biāo)準(zhǔn)法規(guī)場景構(gòu)建
標(biāo)準(zhǔn)法規(guī)類測試場景主要參考國內(nèi)外在自動駕駛測試領(lǐng)域發(fā)布的政策標(biāo)準(zhǔn)法規(guī),包括GB/T 41798-2022《智能網(wǎng)聯(lián)汽車 自動駕駛功能場地試驗(yàn)方法及要求》[2]、UN Regulation No. 157 - Automated Lane Keeping Systems (ALKS)[3]、A Framework for Automated Driving System Testable Cases and Scenarios[4]等。基于其中提出的測試場景,通過提取場景中的關(guān)鍵要素,與ADS的關(guān)鍵元素進(jìn)行匹配,以匹配程度作為依據(jù),決定是否對該場景進(jìn)行測試。
標(biāo)準(zhǔn)法規(guī)場景關(guān)鍵元素分析匹配流程如圖 1所示:
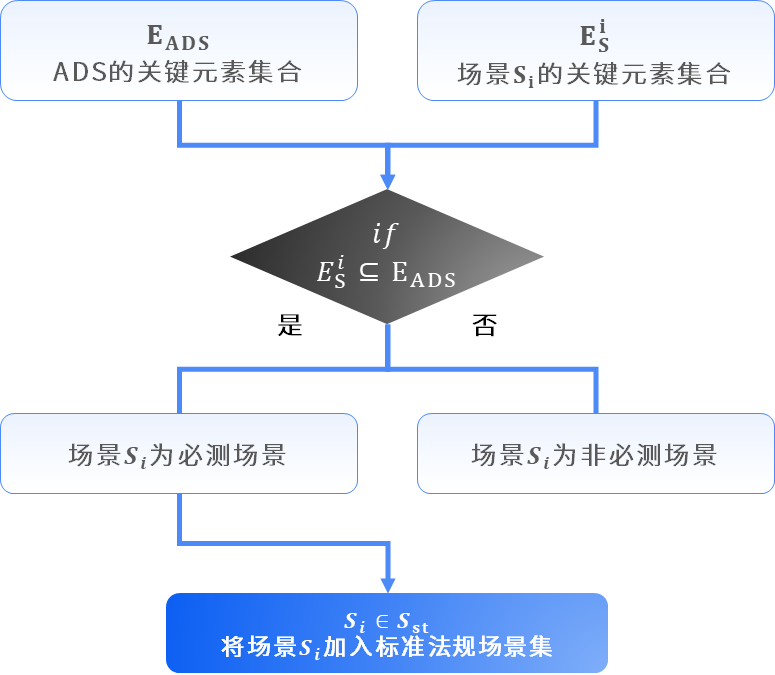
圖1 關(guān)鍵元素分析流程
(點(diǎn)擊查看大圖)
如圖 1所示,首先分析并提取出ADS所有關(guān)鍵元素,構(gòu)造有且僅有ADS全部關(guān)鍵元素的集合。同理,分析并提取標(biāo)準(zhǔn)法規(guī)類場景中的關(guān)鍵元素,構(gòu)造集合并判斷:
如成立,說明場景在ADS功能的ODC范圍內(nèi),即ADS可以在場景中正常運(yùn)行,故確定場景為必測場景,并將場景加入到標(biāo)準(zhǔn)法規(guī)場景集中;
反之,如果存在任意元素,但,則說明場景不在ADS的設(shè)計(jì)運(yùn)行范圍內(nèi),所以為非必測場景。
下文將通過一個實(shí)際案例,更直觀地展示關(guān)鍵元素分析法的思路。
本案例選取ADS功能交通擁堵輔助自動駕駛功能(Traffic Jam Pilot, TJP)為分析對象,選取TJP功能描述中聲明的ODC元素構(gòu)建關(guān)鍵元素集合。TJP功能描述[5]以及ODC元素如下表 1所示:
表1 自動駕駛TJP功能說明
| ADS功能 | 交通擁堵輔助自動駕駛功能(Traffic Jam Pilot, TJP) |
| 功能概述 | 交通擁堵輔助自動駕駛功能(Traffic Jam Pilot, TJP)在擁堵的高速公路上駕駛員可以放開雙手雙腳,同時(shí)注意力可在較長時(shí)間內(nèi)從駕駛環(huán)境中轉(zhuǎn)移,系統(tǒng)最高工作速度為60km/h。 |
| 功能描述 |
系統(tǒng)能在可識別的車道內(nèi)持續(xù)橫向控制,保持車輛中軸線與車道邊界的橫向位置穩(wěn)定以避免誤導(dǎo)其他道路使用者。 在沒有目標(biāo)車輛時(shí),系統(tǒng)能根據(jù)駕駛員設(shè)定的車速最終穩(wěn)定在自車道內(nèi)勻速行駛。 系統(tǒng)具備穩(wěn)定跟隨目標(biāo)車輛行駛的功能,控制試驗(yàn)車輛與目標(biāo)車輛保持合理的跟車距離。 由于其他道路使用者行駛動態(tài)(例如車輛切入、目標(biāo)車輛急減速等)而暫時(shí)造成跟車距離小于最小跟車間距,則試驗(yàn)車輛應(yīng)及時(shí)調(diào)減車速以重新使實(shí)際跟車距離不小于最小跟車距離,除需要緊急剎車的情況外,調(diào)整過程中車輛應(yīng)保持平穩(wěn)。 系統(tǒng)能使試驗(yàn)車輛在合理范圍內(nèi)有穩(wěn)定跟隨目標(biāo)車輛行駛及起停的能力。在駕駛員注意力在環(huán)的情況下,試驗(yàn)車輛單次起停的最長停止時(shí)間應(yīng)不大于5min。 |
| ODC元素 | 高速公路,本車道和相鄰車道目標(biāo)車識別,可脫手,注意力可轉(zhuǎn)移,最高工作速度60km/h。 |
以GB/T 41798-2022《智能網(wǎng)聯(lián)汽車 自動駕駛功能場地試驗(yàn)方法及要求》[2]中推薦的場景為例進(jìn)行分析,標(biāo)準(zhǔn)場景“施工車道”和“前方車輛切入”的分析過程見下表2:
表2 標(biāo)準(zhǔn)法規(guī)場景匹配程度分析示例
| 標(biāo)準(zhǔn)場景1 | 標(biāo)準(zhǔn)場景2 | |
| 場景類型 | 施工車道 | 前方車輛切入 |
| 場景說明 |
試驗(yàn)道路:至少為具備單向雙車道的長直道; 標(biāo)志標(biāo)線:中間車道線為虛線,外側(cè)車道依據(jù)道路施工長期作業(yè)區(qū)的交通控制要求擺放交通錐及交通標(biāo)志等。 |
試驗(yàn)道路:至少包含兩條車道的長直道; 標(biāo)志標(biāo)線:中間車道線為虛線; 試驗(yàn)環(huán)境:測試車輛右前方存在目標(biāo)車輛,目標(biāo)車輛以初始速度勻速行駛,隨后完整完成整個切入動作。 |
| 場景ODC元素 | 長直道路,道路施工 | 長直道路,目標(biāo)車輛(機(jī)動車) |
| ODC元素分析 |
長直道路:在TJP功能的ODC中,未明確說明道路線形元素,但長直道路是高速公路常見的道路幾何線型,因此判斷該元素在TJP的ODC范圍內(nèi)。 道路施工:TJP功能的ODC中未包括對道路施工的識別與響應(yīng),因此判斷該元素不在TJP的ODC范圍內(nèi)。 |
長直道路:在TJP功能的ODC中,未明確說明道路線形元素,但長直道路是高速公路常見的道路幾何線型,因此判斷該元素在TJP的ODC范圍內(nèi)。 目標(biāo)車輛:TJP功能的ODC中未包括對目標(biāo)車輛的識別與響應(yīng),因此判斷該元素在TJP的ODC范圍內(nèi)。 |
| 是否測試 | 兩個ODC元素中,有一個元素超出TJP的ODC范圍。該場景為非必測場景 | 兩個ODC元素均在TJP的ODC范圍。該場景為必測場景 |
參照上述分析思路,對標(biāo)準(zhǔn)法規(guī)中涉及的場景進(jìn)行遍歷分析,篩選測試場景,形成標(biāo)準(zhǔn)法規(guī)場景集。
2
預(yù)期功能安全場景集構(gòu)建
預(yù)期功能安全(Safety Of The Intended Functionality, SOTIF)重點(diǎn)關(guān)注“預(yù)期功能”的安全性,即:滿足預(yù)期設(shè)計(jì)要求的功能所具有的安全水平。由于自動駕駛系統(tǒng)本身和運(yùn)行工況的復(fù)雜性與未知性,自動駕駛功能即使?jié)M足設(shè)計(jì)要求,仍可能存在大量的安全運(yùn)行風(fēng)險(xiǎn),故需要對ADS進(jìn)行SOTIF分析,并對風(fēng)險(xiǎn)控制方案進(jìn)行測試驗(yàn)證。[6]因此,為了支撐驗(yàn)證測試,需要基于SOTIF分析構(gòu)建預(yù)期功能安全測試場景集。
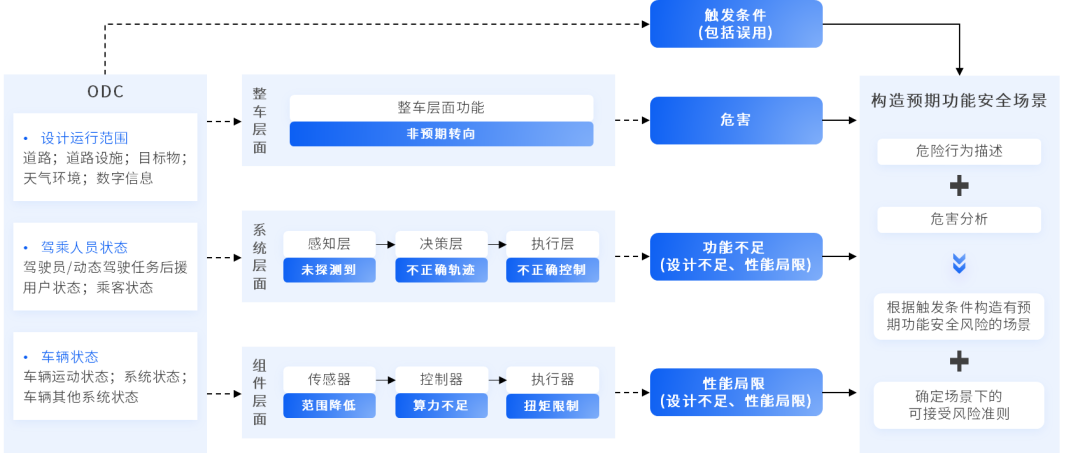
圖2 預(yù)期功能安全分析與場景構(gòu)造流程
(點(diǎn)擊查看大圖)
SOTIF分析流程如圖2所示,首先基于ADS系統(tǒng)的ODC分析,明確ADS的系統(tǒng)邊界,同時(shí)需要對系統(tǒng)功能及ODC等進(jìn)行明確定義。
隨后,依次從整車層面、系統(tǒng)層面以及組件層面,分析識別預(yù)期功能的潛在危害行為,并對已識別出的危害事件進(jìn)行風(fēng)險(xiǎn)評估,并定義相應(yīng)的風(fēng)險(xiǎn)可接受準(zhǔn)則。
如果證明危害事件不會導(dǎo)致不合理的風(fēng)險(xiǎn),則不需應(yīng)用額外的修改措施。若危害事件會導(dǎo)致不合理風(fēng)險(xiǎn),需要識別可能導(dǎo)致預(yù)期功能危害行為的根本原因,并評估潛在功能不足和觸發(fā)條件引起的風(fēng)險(xiǎn)是否合理。
根據(jù)前期的活動,如果必要,則對功能進(jìn)行修改(如:改進(jìn)傳感器的能力,系統(tǒng)降級,進(jìn)一步限制ODC,提示接管等),以改進(jìn)預(yù)期功能安全。若評估系統(tǒng)對觸發(fā)條件的響應(yīng)為可接受,則構(gòu)造相應(yīng)的測試場景,通過“三支柱”測試證明與SOTIF相關(guān)的整車層面殘余風(fēng)險(xiǎn)在功能修改后已滿足風(fēng)險(xiǎn)可接受水平。為了能夠收集所需的證據(jù),可以從該策略中導(dǎo)出相應(yīng)的測試用例,且保證ODC上的測試用例具有足夠高的覆蓋率。
下表3是分析示例,分別分析了ADS的TJP功能的功能不足和性能局限,并以“攝像頭識別標(biāo)志線”和“攝像頭識別目標(biāo)物”為例,基于危害行為分析、危害分析,構(gòu)造預(yù)期功能安全場景:
表3 自動駕駛TJP功能說明
| 功能分層 | 攝像頭識別標(biāo)志線 | 攝像頭識別目標(biāo)物 |
| 危害行為 | 攝像頭無法識別磨損車道線,導(dǎo)致車道線識別率下降,試驗(yàn)車未識別到車道線,轉(zhuǎn)向系統(tǒng)輸出力矩,制動系統(tǒng)未輸出制動力。 | 前方目標(biāo)車顏色(橘黃色)與當(dāng)前背景顏色(黃昏時(shí))相近,攝像頭對前方目標(biāo)物識別準(zhǔn)確度下降,試驗(yàn)車未識別前方目標(biāo)車輛,制動系統(tǒng)未輸出制動力,轉(zhuǎn)向系統(tǒng)未輸出力矩。 |
| 危害 | 試驗(yàn)車與目標(biāo)車存在碰撞風(fēng)險(xiǎn) | 與前方目標(biāo)車存在碰撞風(fēng)險(xiǎn) |
| 場景設(shè)計(jì) | 直道,雙向4車道,右側(cè)存在目標(biāo)車。試驗(yàn)車以35km/h保持車道內(nèi)行駛,目標(biāo)車以30km/h行駛,兩車縱向距離10m、橫向距離1.75m,車道線磨損。 | 雙向4車道,試驗(yàn)車以40km/h保持車道內(nèi)行駛,相同車道前方目標(biāo)車以30km/h保持車道內(nèi)行駛,兩車縱向距離>15.6m,目標(biāo)車橘黃色,時(shí)間18:00,試驗(yàn)車逆光行駛。 |
| 場景圖示 |
 |
 |
| 可接受風(fēng)險(xiǎn)準(zhǔn)則 | 車輛不越過車道邊線,橫向加速度變化率在 0.5s 內(nèi)的平均值不超過5m/s3。 | 不發(fā)生碰撞,且制動減速度<3m/s2,減速后保持與前車最小安全距離>10.8m。或感知系統(tǒng)識別為ODC范圍外場景,提示接管并減速。 |
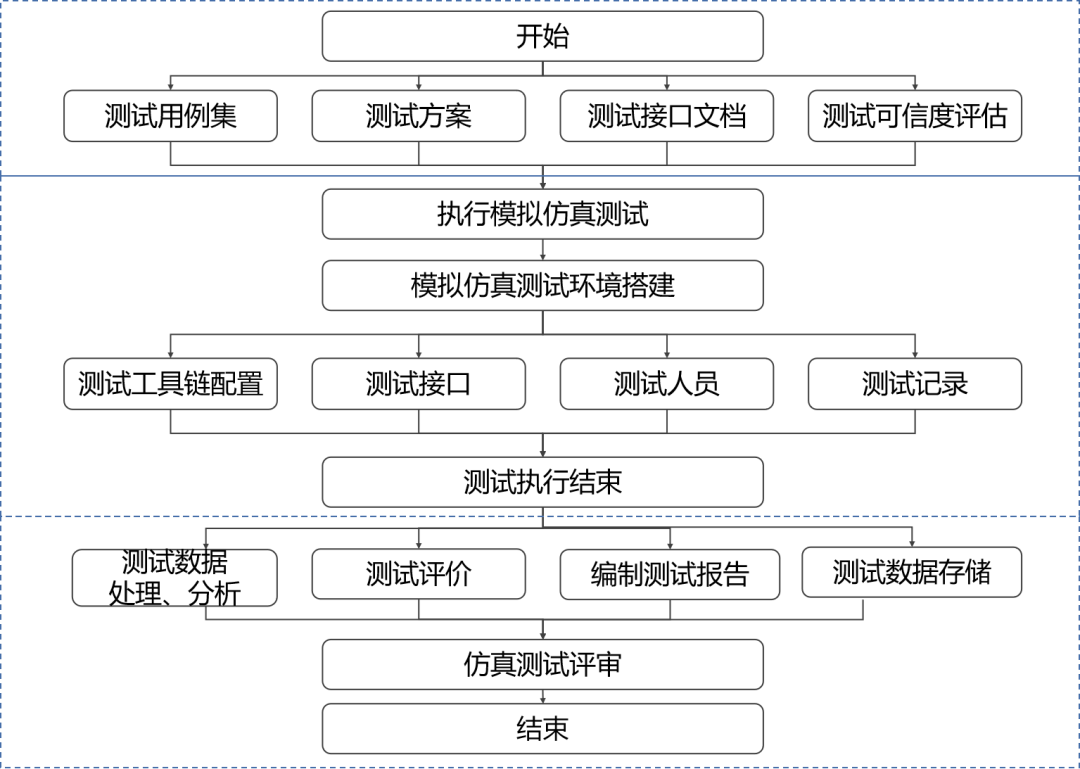
賽目科技自主研發(fā)了安全分析工具Safety Pro,按照標(biāo)準(zhǔn)化的流程執(zhí)行SOTIF閉環(huán)分析。Safety Pro整合了ISO 21448標(biāo)準(zhǔn)提及的所有分析方法,包括HAZOP、FTA、SPTA、GSN和FMEA,并在核心分析環(huán)節(jié)匹配雙重分析方法,形成互查、互補(bǔ),充分保證分析結(jié)果的完整性,可分析產(chǎn)品的局限性和潛在不足,實(shí)現(xiàn)了SOTIF分析和邏輯場景自動化搭建。
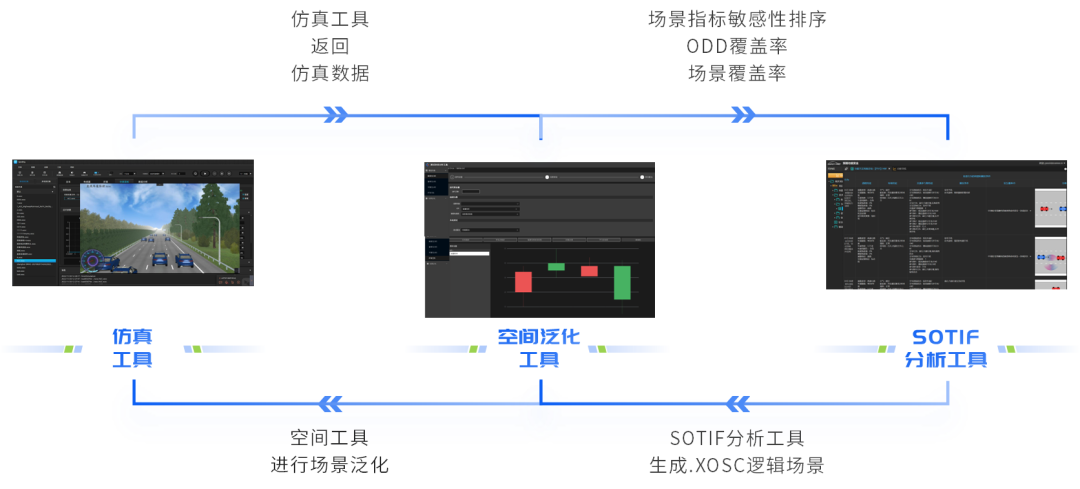
圖3 SOTIF閉環(huán)分析流程
(點(diǎn)擊查看大圖)
圖 3為SOTIF閉環(huán)分析流程,關(guān)于安全分析工具Safety Pro的詳細(xì)介紹可參看往期文章《預(yù)期功能安全的閉環(huán)實(shí)踐——基于算法驅(qū)動的驗(yàn)證體系》。
3
實(shí)車采集數(shù)據(jù)場景集構(gòu)建
實(shí)車采集數(shù)據(jù)轉(zhuǎn)化而來的測試場景能夠保留真實(shí)交通場景的隨機(jī)性、復(fù)雜性,是擴(kuò)充場景集中自然駕駛場景、邊緣場景、失效場景的主要途徑。
實(shí)車采集數(shù)據(jù)場景構(gòu)建的主要方法是搭建采集車采集真實(shí)的交通數(shù)據(jù)信息,通過對采集信息的進(jìn)一步處理和轉(zhuǎn)換,生成仿真場景。目前,賽目科技已有自主研發(fā)的場景采集與生成工具鏈,如圖4所示該工具鏈集成了場景數(shù)據(jù)采集車、數(shù)據(jù)清洗、感知數(shù)據(jù)融合、場景識別與提取工具,并支持自動化生成OpenX標(biāo)準(zhǔn)格式的場景文件,實(shí)現(xiàn)了真實(shí)交通場景數(shù)據(jù)到模擬仿真場景文件的轉(zhuǎn)化。
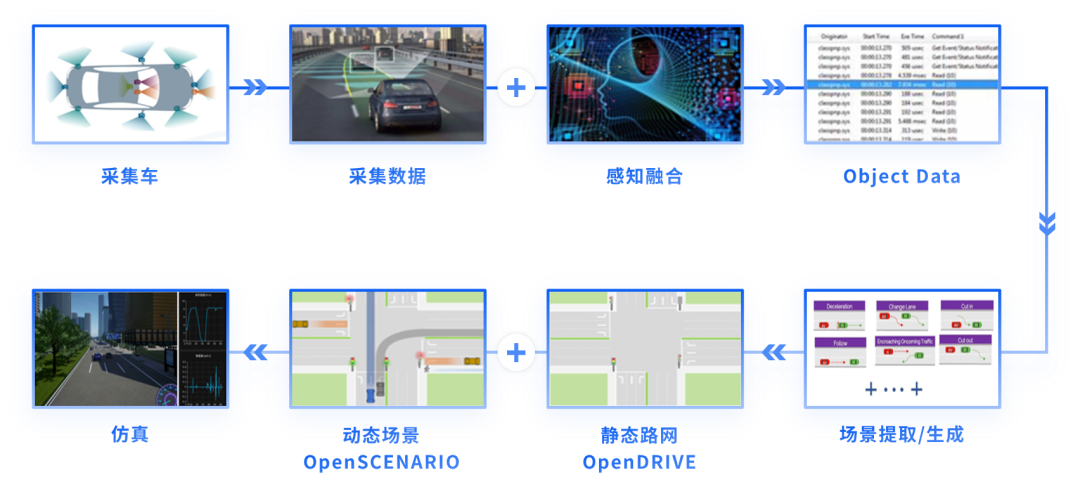
圖4 場景采集與生成工具鏈結(jié)構(gòu)圖
(點(diǎn)擊查看大圖)
工具鏈中的場景識別與提取功能基于自編碼、聚類算法、算法融合等機(jī)器學(xué)習(xí)和深度學(xué)習(xí)方法,采用時(shí)間和數(shù)據(jù)多維度聚合和聚類算法,已能實(shí)現(xiàn)精確提取各種邏輯場景。自然駕駛場景有:主車/環(huán)境車切入切出,跟車等;危險(xiǎn)工況場景有:超車、緊急制動、連續(xù)變速、行人橫穿、行人主車同向、盲區(qū)遮擋等。場景自動化標(biāo)注工具還可以根據(jù)KPI(Key Performance Indicator)安全性指標(biāo)執(zhí)行場景提取標(biāo)注,常用的KPI安全性指標(biāo)有:碰撞時(shí)間、安全距離等。
此外,賽目科技還提供可與場景采集與生成工具配套的場景管理平臺,支持導(dǎo)入OpenX標(biāo)準(zhǔn)格式場景文件,以及場景文件標(biāo)簽標(biāo)注,大大提高場景采集與生成的效率。
4
場景泛化與用例生成
為了保證自動駕駛系統(tǒng)測試場景的有效性和覆蓋度,測試場景中的要素都被定義了取值范圍,可以是連續(xù)或離散,也可以是無限或有限。從場景角度來看,為了避免產(chǎn)生無限多場景,需對樣本空間進(jìn)行采樣,并通過盡量少的樣本,覆蓋設(shè)計(jì)運(yùn)行范圍。
場景空間樣本生成的方法有以全因子法、中心組合法和二次最優(yōu)法為代表的確定性樣本策略,以及以蒙特卡洛采樣、拉丁超立方采樣為代表的隨機(jī)樣本策略。
目前賽目科技研發(fā)的場景空間分析工具可實(shí)現(xiàn)邏輯場景采樣泛化——通過樣本空間生成方法,輸出具體場景,并能根據(jù)自動駕駛系統(tǒng)的安全要求和接受準(zhǔn)則進(jìn)行敏感性分析,實(shí)現(xiàn)參數(shù)空間維度降低,最終得到覆蓋被測自動駕駛系統(tǒng)功能和ODC的充分合理的測試用例集,如圖 5所示。
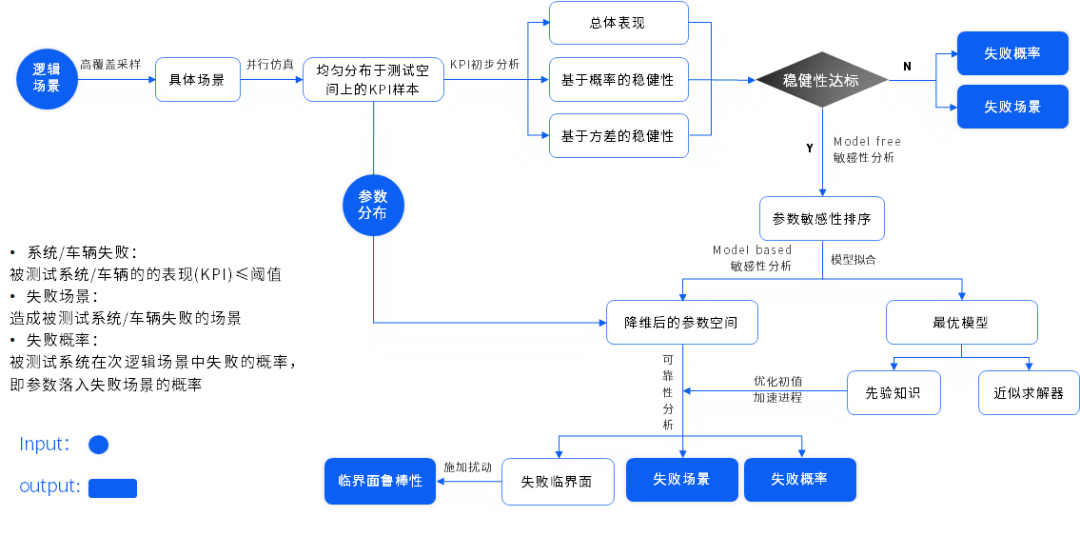
圖5 賽目科技測試空間分析工具示意圖
(點(diǎn)擊查看大圖)
除場景測試空間采樣泛化外,圖 5中還包括了測試空間分析工具的其他功能:
#
KPI初步分析
觀察整體表現(xiàn),快速基于方差/概率的整體魯棒性分析。
#
敏感度分析
對測試空間進(jìn)行降維,提升測試效率;建立擬合模型,提供先驗(yàn)知識及近似求解器,提升可靠性分析效率。
#
可靠性分析
用可接受的成本對系統(tǒng)失敗概率的準(zhǔn)確估計(jì)。
#
臨界面魯棒性分析
基于可靠性分析尋找到的失敗臨界面,判斷系統(tǒng)在失敗臨界面的表現(xiàn)。
結(jié)語
本文是《智能網(wǎng)聯(lián)汽車測試策略研究》系列的上篇,主要回答了智能網(wǎng)聯(lián)汽車測試策略中“測什么”的問題,基于賽目科技的實(shí)踐經(jīng)驗(yàn)和研究成果,提出測試策略研究的場景集構(gòu)建方法,以及場景泛化與用例生成的方法。
-
自動駕駛
+關(guān)注
關(guān)注
788文章
14114瀏覽量
168703 -
智能網(wǎng)聯(lián)汽車
+關(guān)注
關(guān)注
9文章
1129瀏覽量
31370 -
賽目科技
+關(guān)注
關(guān)注
0文章
42瀏覽量
910
原文標(biāo)題:智能網(wǎng)聯(lián)汽車測試策略研究(上)
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
智能網(wǎng)聯(lián)汽車,我國汽車工業(yè)高端轉(zhuǎn)移的有力抓手
中國發(fā)展的突破口就是智能網(wǎng)聯(lián)汽車終端
中國國際工業(yè)博覽會:新能源與智能網(wǎng)聯(lián)汽車展
智能網(wǎng)聯(lián)汽車的關(guān)鍵技術(shù)
智能網(wǎng)聯(lián)汽車的開發(fā)、測試場景如何搭建?
騰訊獲北京智能網(wǎng)聯(lián)汽車道路測試牌照
《智能網(wǎng)聯(lián)汽車自動駕駛功能測試規(guī)范》正式發(fā)布
智能網(wǎng)聯(lián)汽車必備的總線測試方案PDF文件說明

漠河紅河谷智能網(wǎng)聯(lián)汽車寒區(qū)測試基地正式投入運(yùn)營
智能網(wǎng)聯(lián)汽車技術(shù)
智能網(wǎng)聯(lián)汽車測試策略研究(下)

《復(fù)雜電磁環(huán)境下的智能網(wǎng)聯(lián)汽車》系列線上講座

智能網(wǎng)聯(lián)汽車模擬仿真測試(上) ——企業(yè)模擬仿真測試能力建設(shè)
天津自10月30日起開放800公里智能網(wǎng)聯(lián)汽車測試道路
智能網(wǎng)聯(lián)汽車虛擬仿真測試平臺






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論