") 持續(xù)在榜的RAFT-Stereo,你確定不來了解嗎?
持續(xù)在榜的RAFT-Stereo,你確定不來了解嗎?
論文題目:RAFT-Stereo: Multilevel Recurrent Field Transforms for Stereo Matching
作者:Lahav Lipson ;Zachary Teed; Jia Deng等人
作者機(jī)構(gòu):Princeton University(普林斯頓大學(xué))
項(xiàng)目代碼:https://github.com/princeton-vl/RAFT-Stereo(論文中提到的開源代碼,用的是Pytorch框架)
在公眾號「3D視覺工坊」后臺回復(fù)「原論文」,可獲取對應(yīng)論文pdf文件。
RAFT-Stereo是一種用于立體匹配的算法,它使用多層循環(huán)場變換(Multilevel Recurrent Field Transforms)來精確定位左右兩幅圖像中的對應(yīng)點(diǎn)。它包括一個(gè)RAFT網(wǎng)絡(luò)和一個(gè)立體匹配分支,能夠幫助解決深度估計(jì)中的一些挑戰(zhàn),如紋理缺失、遮擋和低紋理等問題。RAFT-Stereo能夠有效地利用循環(huán)場變換來捕捉像素之間的長程依賴性,從而提高立體匹配的準(zhǔn)確性。其次,它還使用了多個(gè)尺度和不同的分辨率,使算法對多尺度立體匹配具有良好的適應(yīng)性。此外,RAFT-Stereo算法還采用了門控循環(huán)單元(GRU)來進(jìn)一步提高處理速度。總的來說,RAFT-Stereo是一種有潛力的立體匹配算法,能夠在多種深度估計(jì)應(yīng)用中發(fā)揮作用。RAFT-Stereo也是作為middleburry排行榜中前五名中,唯一一個(gè)2021年就提出的算法,持續(xù)至今依然名列前茅。

1 前言
立體深度估計(jì)是一個(gè)基本的視覺問題,應(yīng)用范圍廣泛。早期的研究集中在特征匹配和正則化兩個(gè)關(guān)鍵部分。在處理中使用3D卷積神經(jīng)網(wǎng)絡(luò)計(jì)算代價(jià)體是主流方法,但代價(jià)較大,需要特殊方法才能操作高分辨率的圖像。而光流問題則通常使用迭代精化的方法。光流和矯正立體鏡頭是緊密相關(guān)的問題,但兩個(gè)任務(wù)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)卻有很大差異。這里,作者提出了RAFT-Stereo,一種新的雙視立體結(jié)構(gòu)體系,利用了RAFT特有的3D體積和迭代細(xì)化法。RAFT-Stereo僅使用2D卷積和一個(gè)輕量級的成本體積,相比之前的立體網(wǎng)絡(luò),具有更好的泛化能力且不需要復(fù)雜的損失項(xiàng)。RAFT-Stereo在KITTI、ETH3D和Middlebury等真實(shí)數(shù)據(jù)集上表現(xiàn)非常出色,且具有更好的跨數(shù)據(jù)集泛化能力。
2 相關(guān)背景
在計(jì)算機(jī)視覺領(lǐng)域,立體匹配一直是一個(gè)關(guān)鍵性的問題,早期方法集中在設(shè)計(jì)更好的匹配成本和高效的推斷算法上,而深度學(xué)習(xí)被應(yīng)用于改進(jìn)立體匹配的成本函數(shù)。目前的方法更注重于端到端可訓(xùn)練的3D神經(jīng)網(wǎng)絡(luò)架構(gòu),該架構(gòu)包括用于從圖像塊計(jì)算成本的2D卷積網(wǎng)絡(luò),構(gòu)建3D成本體,以及3D卷積層用于處理該成本體。這些方法在一些數(shù)據(jù)集上表現(xiàn)出色,但3D卷積的計(jì)算成本很高,往往不能泛化到其被訓(xùn)練的領(lǐng)域之外。因此,盡管一些努力已經(jīng)集中在提高它們的泛化能力上,但許多工作仍然需要通過替換更輕量級的模塊來提高計(jì)算效率。RAFT-Stereo是一種內(nèi)存效率更高的算法,能夠在百萬像素圖像上預(yù)測全分辨率的立體。
3 方法
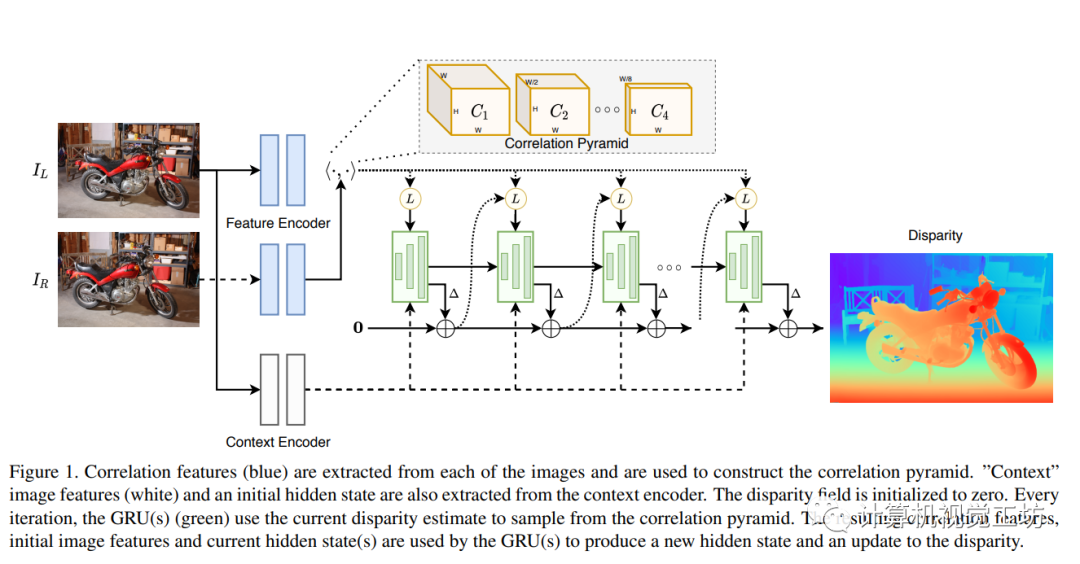
給定一對矯正后的圖像(IL, IR),目標(biāo)是估計(jì)一個(gè)視差場d,使每個(gè)IL中的像素都有水平的位移。與RAFT類似,RAFT-Stereo的方法由三個(gè)主要組件組成:特征提取器、相關(guān)金字塔和基于GRU的更新運(yùn)算符,如圖1所示。更新運(yùn)算符迭代地從相關(guān)金字塔中檢索特征并對視差場進(jìn)行更新。
3.1 Feature Extraction - 特征提取
作者介紹了一種基于特征編碼器和上下文編碼器的特征提取方法。特征編碼器應(yīng)用于左右圖像并生成密集的特征圖,用于構(gòu)造相關(guān)體積。上下文編碼器與特征編碼器結(jié)構(gòu)相同,但采用批量歸一化替代實(shí)例歸一化,僅在左圖像上應(yīng)用。在作者的方法中,上下文特征用于初始化更新運(yùn)算符的隱藏狀態(tài),并在每次迭代中注入GRU。
3.2 Correlation Pyramid - 相關(guān)金字塔
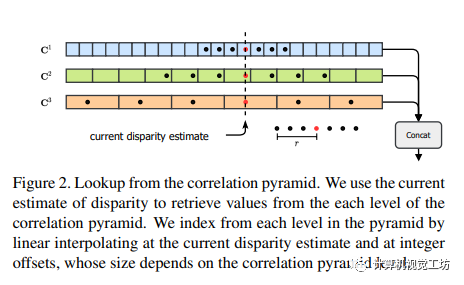
作者提出了相關(guān)金字塔,用于提高矯正立體視覺的精度和魯棒性。相關(guān)體積基于特征向量之間的點(diǎn)積,用于計(jì)算圖像之間的相似性;相關(guān)金字塔通過對最后一個(gè)維度進(jìn)行平均池化構(gòu)建,它具有增加的接受野,但僅通過對最后一個(gè)維度進(jìn)行池化,可以保留原始圖像中的高分辨率信息,從而允許恢復(fù)非常細(xì)微的結(jié)構(gòu);為了從相關(guān)金字塔中檢索像素,作者使用相關(guān)查找算法,它利用一個(gè)類似于 RAFT 中定義的查找算子和線性插值來實(shí)現(xiàn)檢索。該方法具有高效性和魯棒性,并且易于實(shí)現(xiàn)。
3.3 Multi-Level Update Operator - 多級更新運(yùn)算符
作者從一個(gè)初始的起點(diǎn)d0 = 0開始預(yù)測一系列視差場{d1、…、dN}。在每次迭代中,作者使用目前的視差估計(jì)來索引相關(guān)體積,產(chǎn)生一組相關(guān)特征。這些特征經(jīng)過了2個(gè)卷積層。同樣地,目前的視差估計(jì)也經(jīng)過了2個(gè)卷積層。然后將相關(guān)特征、視差和上下文特征連接起來并注入到GRU中。GRU更新隱藏狀態(tài),新的隱藏狀態(tài)然后用于預(yù)測視差更新。
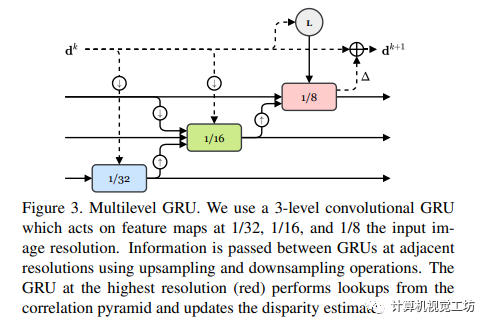
多個(gè)隱藏狀態(tài):原始的RAFT完全在固定的高分辨率上進(jìn)行更新。這種方法的一個(gè)問題是,隨著GRU更新次數(shù)的增加,接受域的增加非常緩慢。這可能對紋理較大、局部信息較少的場景有影響。作者通過提出一個(gè)同時(shí)在1/8、1/16和1/32分辨率上操作特征映射的多分辨率更新運(yùn)算符來解決這個(gè)問題。
上采樣:預(yù)測的視差場分辨率為輸入圖像的1/4或1/8。為了輸出全分辨率的視差圖,作者使用了和RAFT相同的凸上采樣方法。RAFT-Stereo將全分辨率的視差值視為其粗略分辨率鄰居3x3網(wǎng)格的凸組合。最高分辨率的GRU預(yù)測凸組合權(quán)重。
3.4 Slow-Fast GRU - Slow-Fast遞歸神經(jīng)網(wǎng)絡(luò)模型
在這個(gè)部分中,作者介紹了Slow-Fast GRU的方法,針對隱藏狀態(tài)的1/8分辨率進(jìn)行GRU更新所需的FLOPs大約是更新1/16分辨率隱藏狀態(tài)的4倍。為了加快推理速度,在RAFT-Stereo的一個(gè)版本中,每次更新1/8分辨率的隱藏狀態(tài)時(shí)都會多次更新1/16分辨率和1/32分辨率的隱藏狀態(tài)。這種修改將運(yùn)行時(shí)間降低了52%,但是不顯著降低性能,使得RAFT-Stereo能夠在實(shí)時(shí)運(yùn)行中得到高效的計(jì)算結(jié)果。
3.5 Supervision - 監(jiān)督
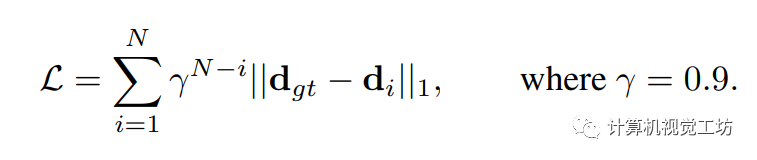
在整個(gè)預(yù)測序列中,作者監(jiān)督預(yù)測和地面真相差距之間的距離l1, {d1,…, dN},權(quán)值呈指數(shù)增長。給定地真差dgt,損失定義為:
4 實(shí)驗(yàn)
4.1 數(shù)據(jù)集和評估指標(biāo)
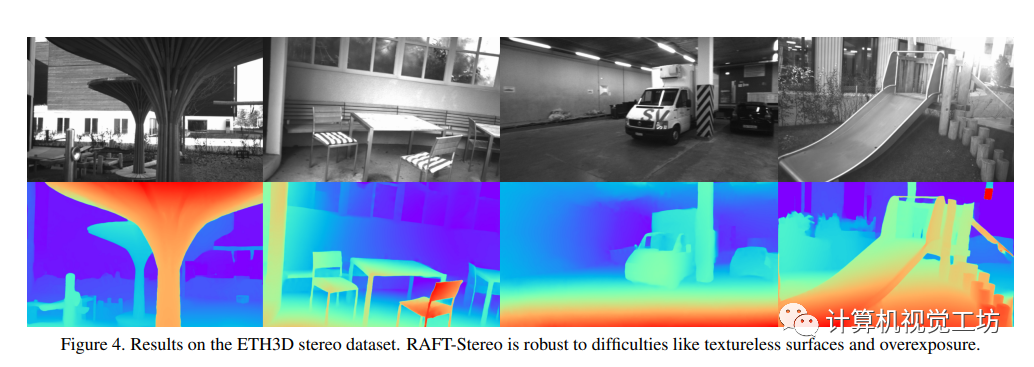
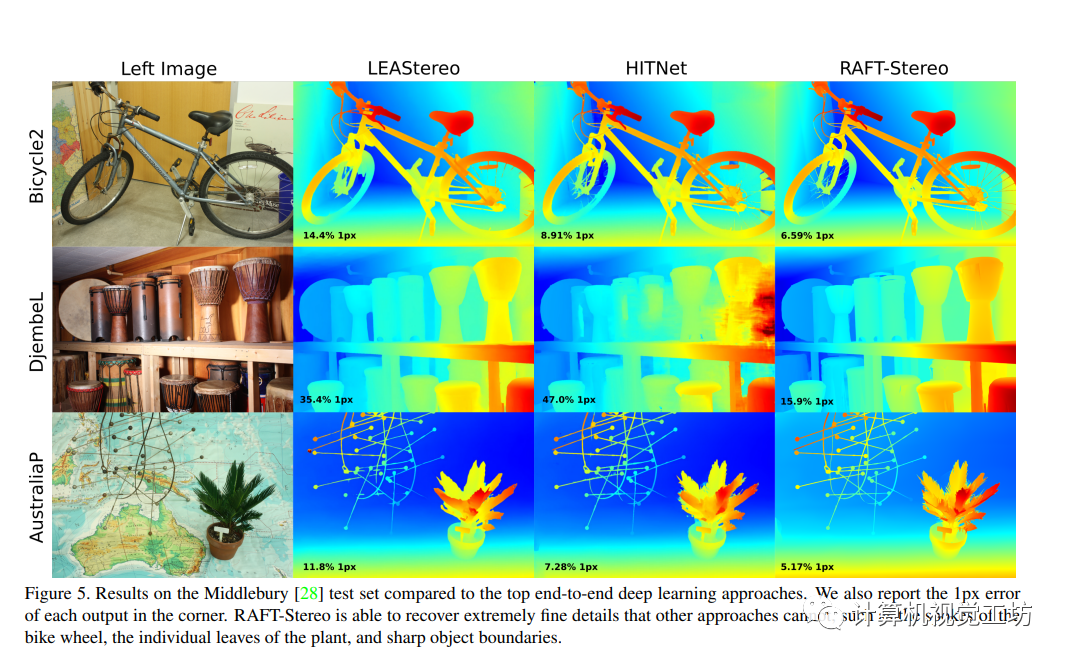
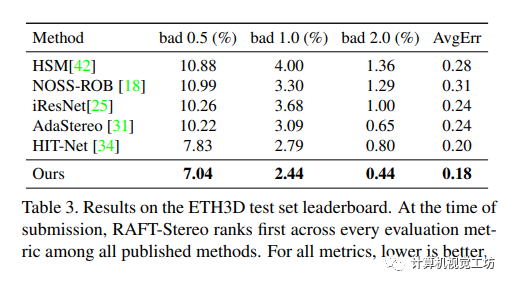
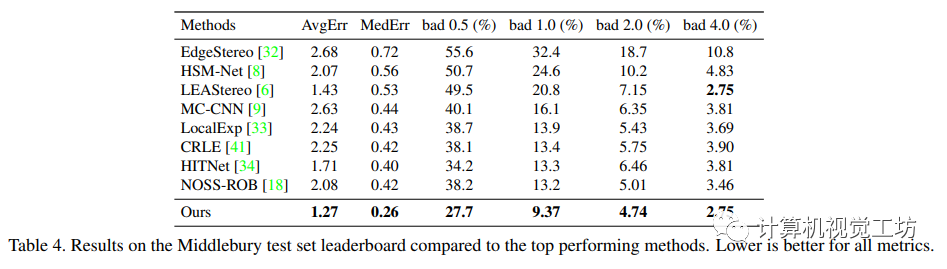
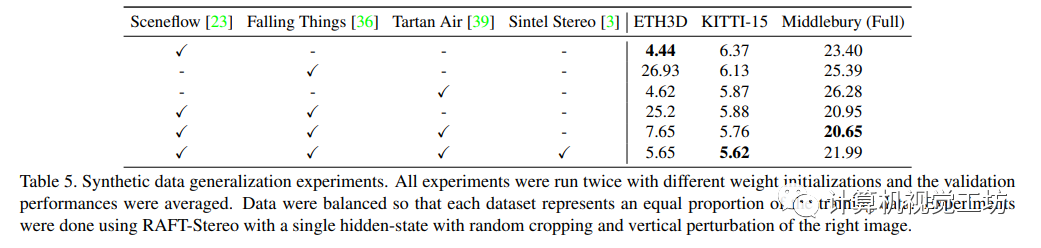
作者在ETH3D、Middlebury 和KITTI-2015上評估了RAFT-Stereo的性能。遵循以前的工作,使用合成Sceneflow數(shù)據(jù)集對模型進(jìn)行預(yù)訓(xùn)練。在ETH3D和Middlebury的排行榜上,RAFT-Stereo取得了較為先進(jìn)的性能,并且RAFT-Stereo在ETH3D、KITTI和Middlebury的零樣本泛化設(shè)置中優(yōu)于其他的方法。
4.2 實(shí)施細(xì)節(jié)
RAFT-Stereo使用Pytorch實(shí)現(xiàn),并使用兩個(gè)RTX 6000 GPU進(jìn)行訓(xùn)練。所有模塊都從頭開始隨機(jī)初始化。在訓(xùn)練期間,使用AdamW優(yōu)化器。在訓(xùn)練計(jì)劃中進(jìn)行32次視差場更新后評估RAFT-Stereo:最終模型使用批量大小為8的合成數(shù)據(jù)進(jìn)行200k步的訓(xùn)練,而去除實(shí)驗(yàn)使用批量大小為6進(jìn)行100k步的訓(xùn)練。在訓(xùn)練過程中運(yùn)行消融實(shí)驗(yàn),使用16個(gè)視差場更新,最終結(jié)果使用22個(gè)更新進(jìn)行訓(xùn)練。作者使用一個(gè)單周期學(xué)習(xí)率計(jì)劃,學(xué)習(xí)率最小值為。所有RAFT-Stereo實(shí)驗(yàn)都在隨機(jī)選擇的360x720裁剪上進(jìn)行訓(xùn)練(不包括基準(zhǔn)提交),所有實(shí)驗(yàn),除了消融實(shí)驗(yàn)外,都使用數(shù)據(jù)增強(qiáng)。具體來說:圖像飽和度在0(灰度)和1.4之間調(diào)整;右圖被擾動以模擬常見于ETH3D和Middlebury等數(shù)據(jù)集中的不完美矯正;作者通過在范圍內(nèi)使用隨機(jī)因子來拉伸圖像和視差,以模擬一系列可能的視差分布。
4.3 Ablations - 消融
RAFT-Stereo使用了多個(gè)隱藏狀態(tài)和單獨(dú)的backbone來提高性能。在運(yùn)行時(shí)間和內(nèi)存使用方面做了權(quán)衡,并通過簡化成本體積和Slow-Fast技術(shù)進(jìn)一步加快了運(yùn)行時(shí)間。在視差估計(jì)上保持更高的分辨率可以提高性能,但會增加運(yùn)行時(shí)間和內(nèi)存使用。最優(yōu)分辨率視場大小的選擇需要在準(zhǔn)確性和計(jì)算代價(jià)之間進(jìn)行權(quán)衡。
4.4 Real-time Inferences - 實(shí)時(shí)推理
RAFT-Stereo在KITTI分辨率下可實(shí)現(xiàn)實(shí)時(shí)推理,可與DSMNet相媲美。Slow-Fast雙級GRU和單個(gè)backbone的使用是實(shí)現(xiàn)實(shí)時(shí)推理的關(guān)鍵。RAFT-Stereo實(shí)現(xiàn)的雙線性采樣器可以進(jìn)一步優(yōu)化成像質(zhì)量。
5 總結(jié)
RAFT-Stereo利用多級GRUs擴(kuò)展了RAFT,實(shí)現(xiàn)了雙視圖立體結(jié)構(gòu)。它在跨數(shù)據(jù)集上的表現(xiàn)達(dá)到了先進(jìn)水平,并且在Middlebury基準(zhǔn)測試中排名持續(xù)位列前五,在ETH3D上表現(xiàn)也非常優(yōu)秀。
RAFT-Stereo是一種基于RAFT的深度圖估計(jì)算法。是一種稠密光流算法,能夠在輸入圖像之間估計(jì)像素之間的運(yùn)動。RAFT-Stereo的主要思想是將光流作為控制變量來解決輸入圖像的深度圖估計(jì)問題。該算法在流形空間中優(yōu)化存儲著光流場和深度圖的全局能量函數(shù)。這種方法既可以考慮全局的能量函數(shù),又可以在局部優(yōu)化,具有高準(zhǔn)確性和穩(wěn)定性。
相比傳統(tǒng)的基于視差的立體匹配算法,RAFT-Stereo在場景中具有更高的魯棒性和魯棒性。此外,RAFT-Stereo還支持在多GPU上進(jìn)行訓(xùn)練和推理,并且速度非常快。總之,RAFT-Stereo是一種強(qiáng)大的深度估計(jì)算法,具有高準(zhǔn)確性和魯棒性。它可以用于許多應(yīng)用程序,例如3D場景重建、自動駕駛汽車、虛擬現(xiàn)實(shí)和增強(qiáng)現(xiàn)實(shí)等。
審核編輯 :李倩
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4779瀏覽量
101059 -
圖像
+關(guān)注
關(guān)注
2文章
1089瀏覽量
40542 -
提取器
+關(guān)注
關(guān)注
0文章
14瀏覽量
8126
原文標(biāo)題:持續(xù)在榜的RAFT-Stereo,你確定不來了解嗎?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
FHT4644國產(chǎn)替代必然性崛起你還不來了解一下芯片這些事嗎
ESP32用send函數(shù)發(fā)送數(shù)據(jù)時(shí),經(jīng)常出現(xiàn)進(jìn)到send后就出不來了的情況,為什么?
菜鳥求助:程序有時(shí)進(jìn)入延時(shí)后就出不來了,不知怎么回事
DSP F2812 GPIOF12配置成通用I/O口,為什么輸出不來了高電平?
請問AD1955在處于DSD模式時(shí)只能是stereo嗎?
為什么任務(wù)跑起來直接進(jìn)入了while(1)出不來了?
uCOSIII移植運(yùn)行到OSStart();這個(gè)函數(shù)里面就出不來了是怎么回事?
AD1955在處于DSD模式時(shí)只能是stereo嗎?
用案例來了解貼片功率電感的作用

使用 RAPIDS RAFT 進(jìn)行機(jī)器學(xué)習(xí)和數(shù)據(jù)分析的可重用計(jì)算模式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論