") KUAK機(jī)器人常用系統(tǒng)變量介紹
KUAK機(jī)器人常用系統(tǒng)變量介紹
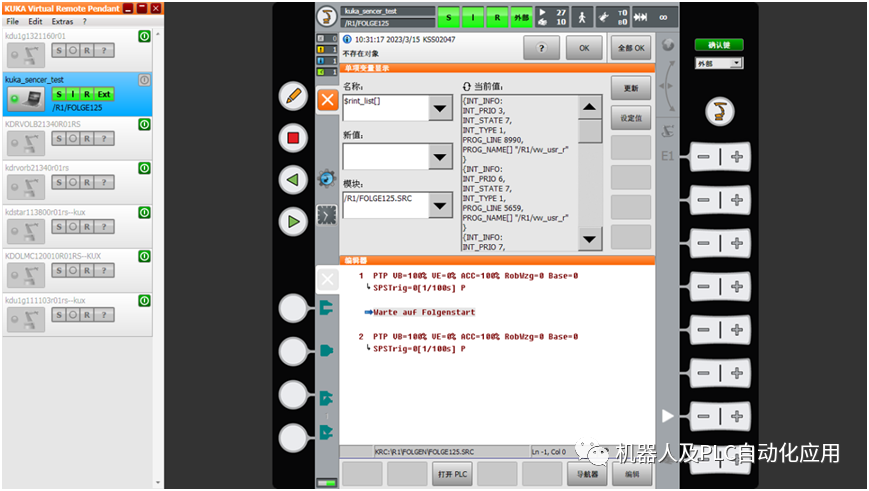
帶有機(jī)器人中斷數(shù)據(jù)的結(jié)構(gòu)
這些數(shù)據(jù)可以通過(guò)變量校正功能或通過(guò)主菜單中的診斷功能顯示。
在robot和submit程序中,最多可以同時(shí)聲明32個(gè)中斷,同時(shí)最多可以激活16個(gè)中斷。
有關(guān)中斷編程的更多信息,請(qǐng)參閱系統(tǒng)集成商的操作和編程說(shuō)明。
$RINT_LIST[ Index ]={INT_PRIO Priority,INT_STATE State,INT_TYPEType,PROG_LINE Line ,PROG_NAME[] "Name"}
| Index |
類型:INT 中斷的索引 ? 1 … 32 |
| INT_PRIO |
類型:INT 中斷的優(yōu)先級(jí) ? 1, 2, 4 … 39 ? 81 … 128 |
| INT_STATE |
中斷狀態(tài)的位陣列 ? Bit 0=1:宣布并激活中斷。 ? Bit 1=1:中斷被激活并啟用。 ? Bit 2=1:全局聲明中斷。 |
| INT_TYPE |
類型:INT 中斷類型 ? 0:標(biāo)準(zhǔn)中斷 ? 1:由于緊急停止而中斷($EMSTOP) ? 2:中斷快速測(cè)量輸入的激活($MEAS_PULSE) ? 3:由于錯(cuò)誤停止而中斷($STOPMESS) ? 4:由于觸發(fā)而中斷(子程序調(diào)用) |
| PROG_LINE |
類型:INT 宣布中斷的機(jī)器人程序的行號(hào) |
| PROG_NAME |
類型:CHAR 宣布中斷的機(jī)器人程序的目錄和名稱:最多32個(gè)字符 |
審核編輯:彭靜
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208028 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7134瀏覽量
89424 -
編程
+關(guān)注
關(guān)注
88文章
3637瀏覽量
93916
原文標(biāo)題:KUAK機(jī)器人常用系統(tǒng)變量之$RINT_LIST[]
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
簡(jiǎn)易機(jī)器人DIY——常用工具篇
。那么,下面就羅列出簡(jiǎn)易機(jī)器人DIY所常用的工具。希望對(duì)喜歡機(jī)器人和想自己DIY機(jī)器人的小伙伴們有所幫助。
發(fā)表于 03-06 09:48
機(jī)器人常用材料
機(jī)器人常用材料1)碳素結(jié)構(gòu)鋼和合金結(jié)構(gòu)鋼這類材料強(qiáng)度好,特別是合金結(jié)構(gòu)鋼,其強(qiáng)度增大了4~5倍,彈性模量E大,抗變形能力強(qiáng),是應(yīng)用最廣泛的材料。2)鋁、鋁合金及其他輕合金材料 這類材料的共同特點(diǎn)是
發(fā)表于 09-04 09:21
先進(jìn)機(jī)器人控制
《先進(jìn)機(jī)器人控制》從控制的角度系統(tǒng)地介紹了機(jī)器人學(xué)的基礎(chǔ)知識(shí)和當(dāng)前的發(fā)展?fàn)顩r。全書(shū)共分為12章,由基礎(chǔ)篇、控制結(jié)構(gòu)篇和先進(jìn)控制篇構(gòu)成。基礎(chǔ)篇著重介紹
發(fā)表于 09-19 15:30
盤點(diǎn)機(jī)器人常用的三種電機(jī)
有時(shí)觀看完一些機(jī)器人視頻或現(xiàn)場(chǎng)的比賽,都會(huì)有自己動(dòng)手制作機(jī)器人的沖動(dòng),但一般人都不具有專業(yè)知識(shí),導(dǎo)致不知該如何入手。今天,創(chuàng)客集結(jié)號(hào)介紹一些機(jī)器人
發(fā)表于 10-25 11:50
零基礎(chǔ)玩轉(zhuǎn)工業(yè)機(jī)器人
介紹DELTA并聯(lián)機(jī)器人的基礎(chǔ)知識(shí)與系統(tǒng)設(shè)計(jì)原理,并結(jié)合ABB和FANUC機(jī)器人,介紹了工業(yè)生產(chǎn)中的常用
發(fā)表于 10-29 17:03
機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
機(jī)器人”的額外指導(dǎo)。圖1很好地展示了一個(gè)機(jī)器人系統(tǒng),其具有一般受保護(hù)的工作空間和一個(gè)協(xié)同操作空間。下面的視頻中對(duì)此也有介紹。ISO/TS 15066的關(guān)鍵主題之一是“功率和力限制”。在
發(fā)表于 10-30 11:33
桁架機(jī)器人核心配件介紹
桁架機(jī)器人核心配件介紹1.控制器在數(shù)控機(jī)床機(jī)器人控制器方面,目前通用的多軸控制器平臺(tái)主要分為以嵌入式處理器(DSP,POWERPC)為核心的運(yùn)動(dòng)控制卡和以工控機(jī)加實(shí)時(shí)系統(tǒng)為核心的PLC
發(fā)表于 11-22 12:08
機(jī)器人系統(tǒng)是什么?
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請(qǐng)求時(shí)開(kāi)始的。導(dǎo)航系統(tǒng)通過(guò)制定行程計(jì)劃或軌跡以開(kāi)始執(zhí)行位置變化請(qǐng)求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及
發(fā)表于 09-10 10:44
DF-1仿人機(jī)器人怎么樣?
中應(yīng)用的傳感器種類繁多,例如視覺(jué)傳感器、電子羅盤、加速度計(jì)和超聲波傳感器等都是仿人機(jī)器人中常用的傳感器。DF-1機(jī)器人是我院自主研制的一款仿人機(jī)器人。本文首先對(duì)DF-1機(jī)器人總
發(fā)表于 09-18 06:17
拳頭機(jī)器人視覺(jué)線跟蹤系統(tǒng)介紹
在物流搬運(yùn)行業(yè),拳頭機(jī)器人由于其獨(dú)特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場(chǎng)合。其中,拳頭機(jī)器人的視覺(jué)線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
發(fā)表于 08-06 06:30
機(jī)器人工具箱中的常用函數(shù)介紹
這一節(jié),就機(jī)器人工具箱中的一些常用的函數(shù)做一下簡(jiǎn)單的介紹。機(jī)器人工具箱在機(jī)器人建模、軌跡規(guī)劃、控制、可視化仿真等方面給
發(fā)表于 09-15 09:04
什么是機(jī)器人控制系統(tǒng)
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
發(fā)表于 10-11 09:38
機(jī)器人Python仿真軟件介紹
相關(guān)知識(shí)機(jī)器人Python仿真軟件介紹軟件安裝使用Python的第一步現(xiàn)在,我們將嘗試使該機(jī)器人移動(dòng)。 有關(guān)的RoBIOS命令是int VWSetSpeed(int linSpeed, int
發(fā)表于 12-20 07:53
PDF——工業(yè)機(jī)器人技術(shù)及應(yīng)用
本書(shū)系統(tǒng)地介紹了工業(yè)機(jī)器人的基本組成、機(jī)械機(jī)構(gòu)、運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)、控制系統(tǒng)、編程與調(diào)試、典型應(yīng)用、管理與維護(hù)等內(nèi)容。全書(shū)共7章,第1章介紹了工
發(fā)表于 10-16 21:21
讀取機(jī)器人程序中的變量
其中包含引用解釋器的進(jìn)程指針的數(shù)據(jù). 變量包含接下來(lái)將在解釋器中執(zhí)行的塊的數(shù)據(jù)。 根據(jù)特定的解釋器,訪問(wèn)數(shù)據(jù)的方式如下: 讀取機(jī)器人程序中的變量是指機(jī)器人在解釋器中的狀態(tài)。 在提交程序






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論