 基于微懸臂梁的MEMS探針中與傾斜相關定位誤差的量化和校正
基于微懸臂梁的MEMS探針中與傾斜相關定位誤差的量化和校正
據麥姆斯咨詢報道,法國里爾大學(University of Lille)的研究科學家Steve Arscott近日在Journal of Micromechanics and Microengineering(JMM)期刊上發表了題為“Quantifying and correcting tilt-related positioning errors in microcantilever-based microelectromechanical systems probes”的論文,提出了基于微懸臂梁的MEMS探針中與傾斜相關定位誤差的量化和校正方法。作者希望這篇論文提出的思路和發現,對測試工程師和自動探測MEMS探針設計師有一定的啟發作用。
電氣測試探針已經有相當長的開發歷史。自20世紀70年代以來,業界就開發出了射頻(RF)探針用于對微電子革命“成果”(包括模擬和數字器件及系統)進行晶圓級表征。事實上,隨著微電子技術的微型化和工作頻率的發展演進,電氣探針也在不斷改進以保持表征性能,這包括了其自身的微型化。
隨著晶圓上的探針和目標接觸焊盤越來越小,探針的放置變得越來越有挑戰性。更小探針的制造也變得更加迫切,傳統基于組裝的制造可能很快需要被微米/納米制造所取代。在這一重要背景下,很多學者已經研究了各種位置誤差對高頻電氣探針性能的影響。這些研究大多涉及宏觀的商用探針的放置,還沒有考量探針潛在的機械柔韌性。
就微型探針而言,已經研究了避免誤差的自動定位技術。量化并控制傾斜誤差,對于利用微懸臂梁優化自動化探針測試至關重要。然而,后者的研究還沒有考量潛在的微型MEMS探針的機械柔韌性。微懸臂梁可用于制造各種微型電氣探針,包括射頻探針。
微懸臂梁利用MEMS技術制造,這使得探針能夠微型化,具有機械柔韌性,并且在制造階段與微電子材料和器件的結合兼容。然而,為了實現最佳探測和電接觸,需要考慮微懸臂梁固有的機械柔韌性。
事實上,針尖滑動本身可以被視為一種定位誤差,原則上可以利用滑動補償來消除這種誤差。這種探針的超行程/滑動/接觸力的關系已經得到了充分研究和分析。這些分析產生了一套基本且易于使用的建模工具。不過,這些分析忽略了潛在的傾斜相關幾何位置誤差對此類探針針尖表面接觸的影響,而這在實踐中很常見。
對于微型射頻探針,通常需要三個電觸點:即兩個接地觸點及其包圍的信號觸點,這對于共面波導(CPW)和微帶配置都是如此。中心信號觸點與相鄰接地觸點之間的距離由微波設計定義,這種分離意味著探針針尖具有有限的頂點長度。
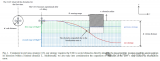
為了獲得最佳的電接觸,這三個觸點必須同時與下面的測試特征緊密接觸,通常是由光刻工藝定義的金屬接觸焊盤。還必須存在足夠的接觸力以實現低電阻電接觸。鑒于這種基于微懸臂梁的探針配置,Steve Arscott考量了放置誤差的來源,并對其進行了量化。
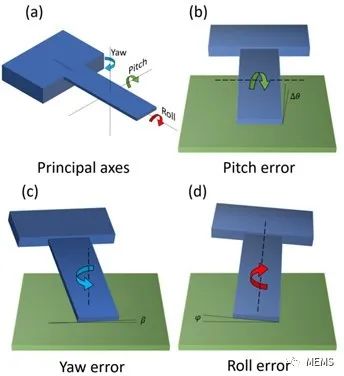
基于微懸臂梁的MEMS探針中俯仰(Pitch)、偏航(Yaw)和滾轉(Roll)誤差的定義(來源:JMM)
在這項研究中,Steve Arscott嘗試量化了基于柔性懸臂量的MEMS探針的滾轉誤差,以預測滾轉誤差對此類探針超行程/滑動/接觸力關系的影響。由此,探針設計者可以通過建模工具來量化并預測滾轉誤差角的影響,并且對于高價值MEMS探針,有望在測試過程中避免可能具有破壞性的實際試驗和誤差方法。
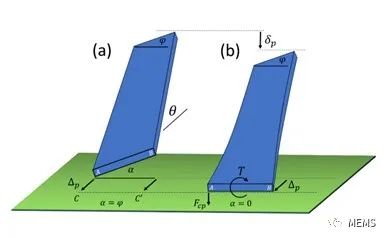
基于具有柔韌性的微懸臂梁的MEMS探針中滾轉誤差角示意圖(來源:JMM)
致密聚苯乙烯的彈性模量在<110>方向上比結晶硅的彈性模量小約100倍,那么厘米級尺寸的聚苯乙烯懸臂梁的剛度與微米級硅懸臂梁就處于同一數量級。因此,Steve Arscott采用致密聚苯乙烯懸臂梁進行了宏觀實驗,其結果可用于測試該力學模型,還有助于深入了解采用硅基微懸臂梁預期的力學行為。實驗結果證明了模型與實驗之間的良好一致性。
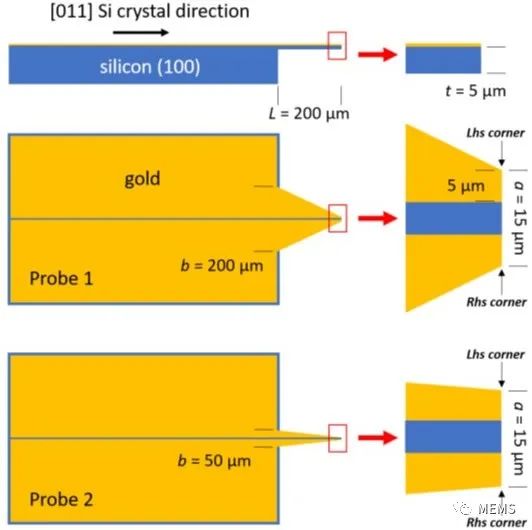
兩個基于具有柔韌性的梯形硅微懸臂梁的MEMS雙觸點探針(來源:JMM)
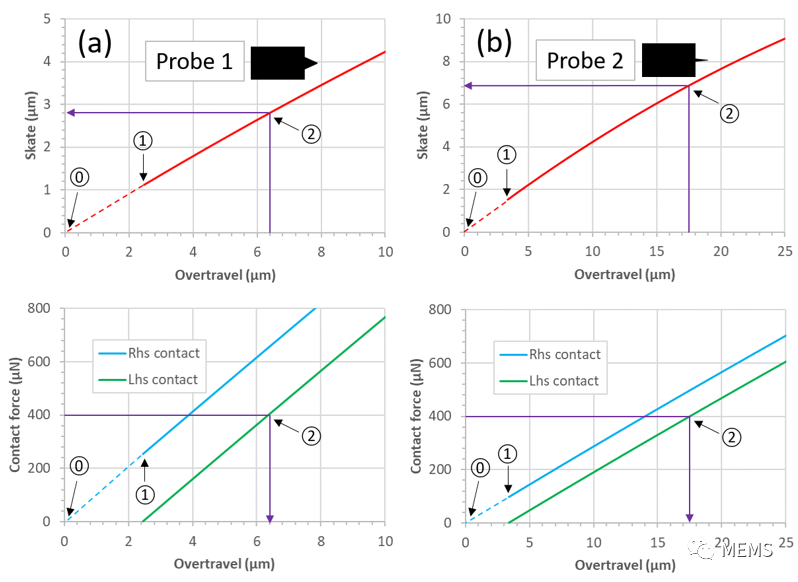
兩個基于微懸臂梁的MEMS探針的建模結果(來源:JMM)
總結來說,分析建模可以描述具有兩個或多個電接觸焊盤的MEMS探針中的滾轉角位置誤差。通過考量給定懸臂的彎曲、扭轉、針尖滑動和接觸力,推導出了與尖端平面度所需超行程相關的方程。有趣的是,這些方程只涉及懸臂材料的泊松比,而不涉及彈性模量或剪切模量的絕對值。
對于給定的滾轉誤差角,該模型可以預測實現探針尖端平面度所需的超行程。該模型還可以預測每個接觸焊盤上的接觸力,并且原則上可以用于預測滾轉誤差角對電接觸測試質量的影響。該模型可以采用厘米級尺寸的懸臂進行測試。這種方法相比微型懸臂梁更具挑戰性的表征要容易。
測量和建模的方法學能夠評估材料的機械性能(彈性模量、剪切模量和泊松比)。該模型的預測與實驗結果相當吻合。由于該模型是可擴展的,因此至少在原理上,它大致可以近似了解基于硅微懸臂梁的MEMS探針中的滾轉角定位誤差。
這些研究發現可以提出基于具有柔韌性的微懸臂梁的探針中滾轉誤差的補償和校正方案。具有柔韌性的微懸臂梁可以對滾轉誤差角進行扭轉補償,還可以校正滾轉誤差角。探針尖端的特定幾何形狀和實驗設置將決定哪種方法最適合。
作者簡介:
Steve Arscott是法國里爾大學電子、微電子和納米技術研究所(IEMN)的CNRS研究科學家。自1994年在英國曼徹斯特大學獲得博士學位以來,他的主要研究方向包括微納制造及其眾多應用,例如在IEMN開發的微型硅基MEMS探針的持續創新和研究,可用于微電子電路的高頻表征及晶圓級電氣表征。
論文鏈接:DOI 10.1088/1361-6439/acd25e
審核編輯 :李倩
-
mems
+關注
關注
129文章
3985瀏覽量
191475 -
探針
+關注
關注
4文章
212瀏覽量
20624 -
焊盤
+關注
關注
6文章
560瀏覽量
38359
原文標題:基于微懸臂梁的MEMS探針中與傾斜相關定位誤差的量化和校正
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電壓放大器在自感知的懸臂梁變形控制研究中的應用
高溫電阻測試儀的四探針法中,探針的間距對測量結果是否有影響

微波測量探針

Aigtek功率放大器在懸臂梁式壓電俘能器研究中的應用
安泰功率放大器在軌道車輛振動壓電俘能結構中的應用
功率放大器在懸臂梁式壓電俘能器研究中的應用
突破性能瓶頸!MEMS關鍵器件材料創新

高壓功率放大器在壓電驅動器的研究中的應用
如何設置UVC探針結構中的dwClockFrequency值?
STM8L052的LSI能否校正,又該怎樣校正,校正結果的誤差又是多少?
振弦采集儀在巖土工程監測中的誤差分析與校正方法

無人機飛行中定位誤差的影響探究
一種基于懸臂型微梁的可調諧多閾值慣性開關的設計、模擬與測試






 工商網監
工商網監
評論