 加快風扇速度控制設計
加快風扇速度控制設計
討論了控制無刷直流冷卻風扇的速度。圖中顯示了分立式和IC風扇速度控制器的示例。本文介紹了 12V、24V 和 48V 設計以及隔離版本。討論了用于速度控制的轉速表反饋。
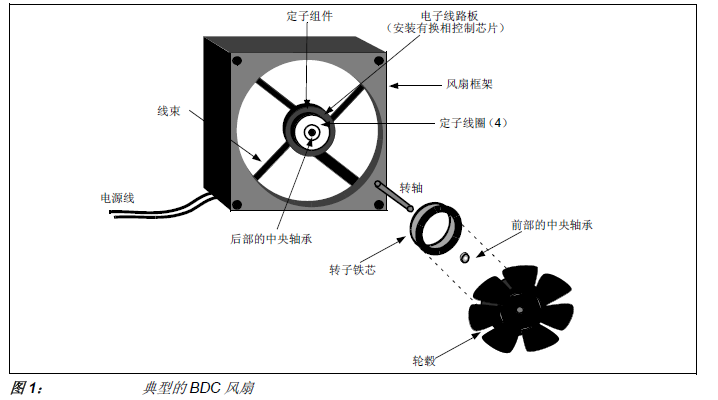
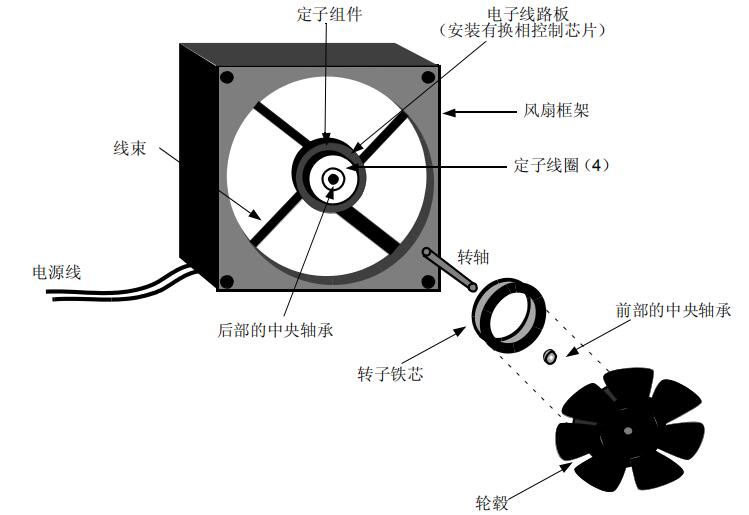
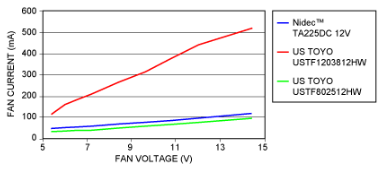
PC和其他類型電子設備中常用的無刷直流風扇的速度控制因其非線性行為而變得復雜。如圖1所示,在電壓達到高度可變的啟動電壓之前,電機根本不運行,并且速度僅近似線性超過該點。
圖1.此圖顯示了典型無刷直流風扇的電壓與速度的關系。風扇轉動在 3V 至 5V 之間啟動,但很難預測確切的啟動電壓。確切的點因風扇的使用壽命和環境條件而異。盡管該圖在起點上方是線性的,但大多數風扇僅近似于電壓與速度的線性關系。閉環風扇速度調節克服了所有這些困難。
調節風扇速度的電路可以克服這些困難。帶轉速計輸出的電機的可用性有助于這些電路的設計。
基本的風扇控制放大器
一段時間以來,已經有集成電路(IC)可用,其中包括用于控制風扇速度的DAC(數模轉換器)。這些電路包括PC系統健康監測器和專用風扇控制IC,如MAX1669,具有線性DAC輸出和PWM輸出。雖然這些IC主要設計用于PC,但已用于其他類型的電子設備。他們配備了I2C 或 SMBus 接口,用于與控制器、處理器或計算機進行通信。通常,DAC輸出被饋入兩種類型的模擬放大器電路中的任何一種,以升壓其電壓輸出,以應用于風扇。
這些系統是“開環”的,并受啟動電壓要求的約束。一種常見的方法是在降低風扇以達到所需速度之前,將全電壓饋送到風扇一小段間隔。最低可行速度是根據經驗確定的,由于它隨時間和條件而變化,因此需要不斷重新驗證。
圖2描述了一個簡單的基于DAC的開環風扇控制的原理圖。它受啟動限制的約束。雖然通常與配備轉速計輸出的風扇一起使用,但IC僅使用這些轉速計信號來監控風扇速度并確定速度是否低于“看門狗”限制。由于這些轉速計信號非常普遍,因此很容易有機會關閉風扇控制的環路。
圖2.簡單的開環風扇控制由一些健康監測器、超級I/O和MAX1669典型的風扇控制器提供。這種設計可以通過任何DAC和任何接口來實現。健康監測器IC始終具有轉速表的輸入,但僅作為看門狗功能,以便主機系統可以驗證風扇是否以最低速率運行。轉速表信號不直接用于風扇控制。由于啟動問題,DAC的某些范圍丟失,導致系統實際上對7位DAC的風扇速度控制不到8位。
閉環風扇控制放大器
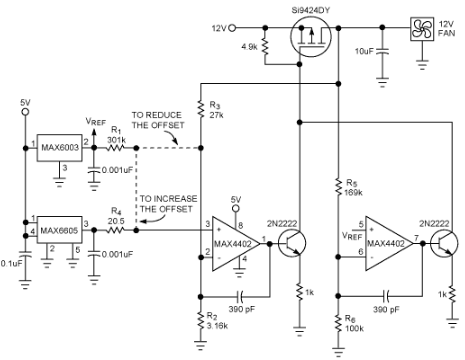
通過使用閉合轉速表環路的外部放大器,可以對DAC驅動風扇控制器進行增強。這種方法基本上可以對從8到0的整個255位DAC代碼范圍進行線性控制。由于轉速表已經存在,因此這種修改只需要一些信號調理和合適的放大器布置。在圖3所示電路中,對轉速計脈沖進行調理,以便去除(區分)所有脈沖寬度信息,僅保留脈沖速率信息。然后,代表頻率或風扇速度的脈沖用作積分電機控制放大器的反饋。
圖3.該閉環風扇控制放大器與圖2所示的IC配合使用。該設計使用轉速計信號進行反饋。這提供了對DAC整個輸出范圍的線性控制。風扇將在任何設置下可靠地啟動,而無需先將風扇全速啟動。
微分器的時間常數最初設置為在風扇全速下提供的脈沖剛好短于最短轉速計脈沖的持續時間。這通常提供的收益太少。可以通過減小R2或C1的值來增加增益。應設置增益,使風扇剛好達到全速,并將全DAC輸出施加到放大器電路的輸入端。
積分器的時間常數設置為對速度變化提供平滑響應,而不會產生任何過沖或搜尋。通常,這是根據實際風扇和系統的經驗完成的。圖4和圖5中的曲線顯示了放大器在積分電容C2在0.1μF和1.0μF兩個值下的響應。 這些值中的任何一個都符合慣常的穩定性標準,這決定了過沖小于25%。
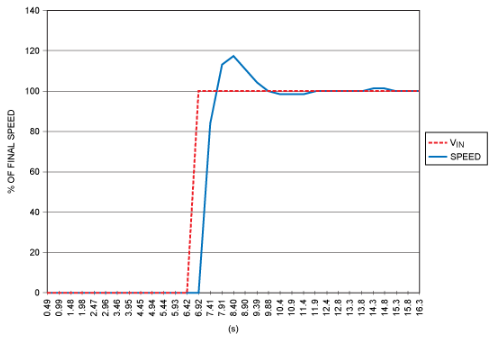
圖4.該圖描繪了一個具有0.01μF積分電容的閉環風扇控制放大器響應階躍變化輸入。
圖5.該圖描繪了一個具有1μF積分電容的閉環風扇控制放大器響應階躍變化輸入。
風扇調節集成解決方案
使用專用IC(如MAX6650/MAX6651)大大簡化了風扇調速設計。
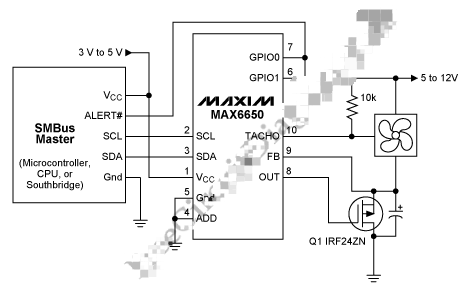
MAX6650設計用于控制單個風扇。MAX6651控制單個風扇,可以監視并充當另外三個風扇轉速計輸出的看門狗。多個MAX6651可以同步以控制多個風扇。這些風扇速度調節器與 I 接口2C 或 SMBus 并使用來自風扇的轉速計反饋來調節其速度。廣泛的可編程性可適應各種風扇速度和類型。圖6所示為MAX6650的典型連接方式。
圖6所示,MAX6650/MAX6651與外部調整管配合使用。由于MAX6650/MAX6651的輸出級是模擬DAC和放大器組合,因此反饋從晶體管的漏極獲取到標有FB的IC上的端子。這種DAC/放大器組合需要本地反饋。完整環路的反饋實際上是風扇的轉速計信號,這也返回到MAX6650/MAX6651。這些器件將驅動風扇,直到轉速計信號與MAX6650/MAX6651速度寄存器中的編程周期相匹配。
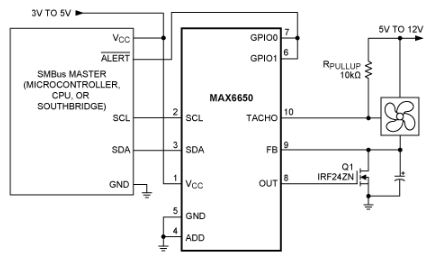
圖6.MAX6650為風扇速度調節提供完整的集成、可接口方案。
控制高壓風扇
有些風扇的額定電壓范圍為24V至48V,MAX6650/MAX6651可以很容易地用于控制這些高壓風扇。只需將反饋和轉速計信號衰減到與實際電源和 12V 之差成正比的量即可。實質上,MAX6650/MAX6651可以被“欺騙”,認為它控制著一個12V風扇。這種修改是通過反饋和轉速計輸出上的簡單衰減網絡完成的。
當設置這些衰減器的值時,TACHO引腳上的轉速計反饋信號應始終保持比FB引腳上的電壓更正。這是在FB網絡上以稍大的衰減完成的。FB網絡實際上可以容忍很寬范圍的衰減,因為這只設置MAX6650/MAX6651輸出級的本地增益。該輸出級仍然包含在由TACHO信號形成的更大反饋環路中。
圖7所示為MAX6650/MAX6651連接至更高電壓風扇的電路。R1應足夠大,以避免加載上拉電阻,R上拉.R1和R2的衰減因子設置為與12V以上電壓增加成正比的衰減因子。例如,在圖7中,R1和R2將轉速計信號衰減到風扇值的四分之一,因為風扇工作在48V。確定R1和R2的衰減因子后,選擇R3和R4具有稍大的衰減因子,以便反饋電壓始終比轉速計信號更負。在圖7中,反饋信號是Q1漏極值的五分之一。轉速計和反饋信號之間的關系如圖8所示的示波器軌跡所示。這種衰減關系是必要的,因為轉速計閾值(以FB引腳為參考)比FB引腳高約1.25V。
圖7.該電路使MAX6650能夠通過將反饋和轉速計信號衰減到類似于48V風扇產生的電平來控制12V風扇。在此設計中,選擇具有足夠額定電壓的 MOSFET。最差情況耗散將為 0.25 × I扇× V扇,其中我扇是風扇的額定電流和V扇是 24V 至 28V 電源。在確定散熱要求時,請考慮這一點。
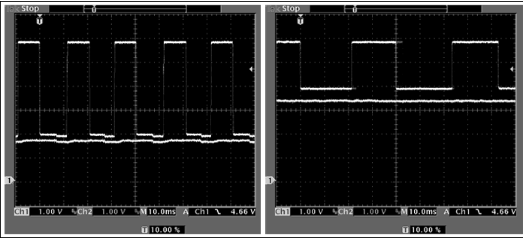
圖8.左邊的示波器照片是在 780 rpm 下拍攝的,驅動 48V 電機。正確的跡線是在 1526 rpm 下拍攝的。方波是MAX6650轉速計引腳上的轉速計信號。直線是MAX6650FB引腳的反饋。請注意,在風扇的工作范圍內,FB引腳上的電壓比TACHO引腳的負電壓更大。這是通過將圖3中的R4/R7組合設置為比R1/R2組合稍大的衰減來確保的。
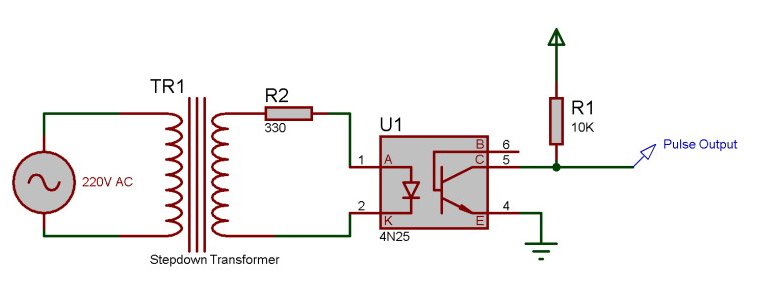
隔離風扇驅動
在某些系統中,風扇的高波動接地電流會因接地回路而引起噪聲問題。接地環路問題很容易通過電流隔離來解決。圖9的原理圖可用于隔離任何I2C或SMBus風扇控制器,包括前面提到的MAX1669或MAX6650/MAX6651。該電路利用已經隔離的風扇電源,使得MAX6650/MAX6651不必包括一個單獨的昂貴的隔離式5V DC-DC轉換器。MAX6330/MAX6331并聯穩壓器提供了一種經濟可靠的48V電壓調節方式。MAX23/MAX6330的SOT6331封裝與5W壓降電阻的尺寸相結合,優于調整穩壓器和散熱器。此外,5W電阻比散熱器更容易安裝,安裝成本更低。
圖9.隔離式風扇控制電路在高風扇電流產生的接地噪聲可能成為問題的情況下非常有用。IC1和IC2包括一個用于數據線的雙向數字隔離器。由于MAX6650/MAX6651僅作為時鐘輸入,因此IC3時鐘可以使用單向隔離。IC4是耦合的可選補充。
在圖9中,雙向光隔離器電路隔離數據線。雙向隔離器電路在前面的文獻中已經描述過。1,2IC1和IC2連接在一起,因此兩端的低電平導致另一側的低電平,而無需隔離器電路鎖存。
幾乎所有的 I2這里討論的 C 和 SMBus 器件具有僅輸入的時鐘引腳(而不是某些 I2C IC,可以通過保持低時鐘來“拉伸”時鐘)。這種設計只需要一個單向隔離器,從而簡化了隔離。這些器件中的大多數還具有看門狗或報警輸出,可通過另一個單向隔離器耦合回控制器。
風扇速度調節與風扇速度控制
閉環風扇控制克服了控制直流無刷風扇所涉及的固有非線性。然后,風扇控制變為風扇速度調節。即使在風扇與風扇之間以及由于老化而變化的情況下,也能確保精確的風扇速度。通過可用的風扇控制和健康監測IC,通過在輸出端使用閉環放大器電路,可以輕松實現閉環風扇調節。最近,IC提供閉環風扇速度調節。
這些相同的方法很容易適應滿足更有限需求的電路。電信等許多應用都使用48V風扇,這些電路和IC可以適應該用途。電流隔離方法可以解決風扇電流尖峰大時偶爾出現的混亂接地環路問題。
審核編輯:郭婷
-
集成電路
+關注
關注
5391文章
11617瀏覽量
362819 -
轉換器
+關注
關注
27文章
8742瀏覽量
147756 -
dac
+關注
關注
43文章
2309瀏覽量
191380
發布評論請先 登錄
相關推薦
怎么實現使用智能手機控制風扇速度
BLDC 風扇的可變速度控制算法
剖析風扇速度控制器原理
如何使用Arduino生成的PWM來控制交流風扇的速度
使用Arduino和晶閘管(TRIAC)控制交流風扇的速度

風扇控制的進步:考慮風扇速度調節





 工商網監
工商網監
評論