 EtherCAT和Ethernet的不同點有哪些, 通信周期又是什么意思?
EtherCAT和Ethernet的不同點有哪些, 通信周期又是什么意思?
小伙伴們,我們又來了。上期大概介紹了EtherCAT的一些特性,本期我們將會更詳細的介紹一下EtherCAT的實現方式,通信周期的意義到底是什么、SDO和PDO到底是什么等概念。
首先要聲明,盡管本期介紹略微深入,實際上小伙伴使用正運動控制器的時候是非常簡單的,你完全可以不了解下面的概念就可以充分利用正運動在總線上的多種優勢,這篇文章是為感興趣,想了解更多的小伙伴寫的。只有了解更多,才能解決復雜問題哦。
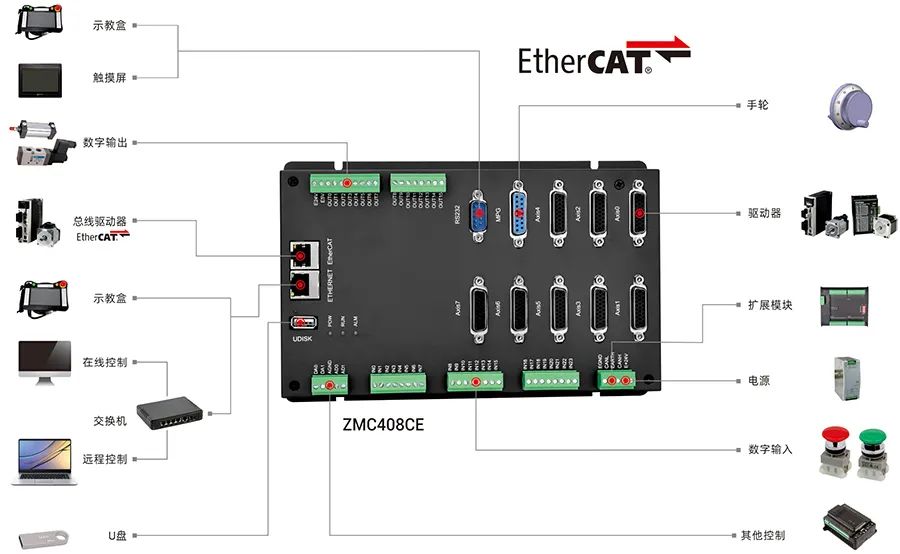
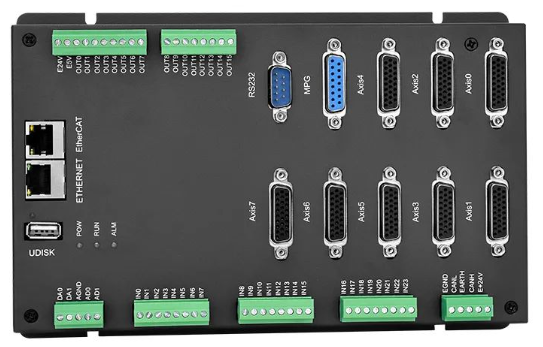
” ZMC408CE 實現“8通道獨立PSO”應用場景 說到EtherCAT總線控制器,這里為大家介紹一款正運動技術推出的高性能EtherCAT總線運動控制器ZMC408CE。
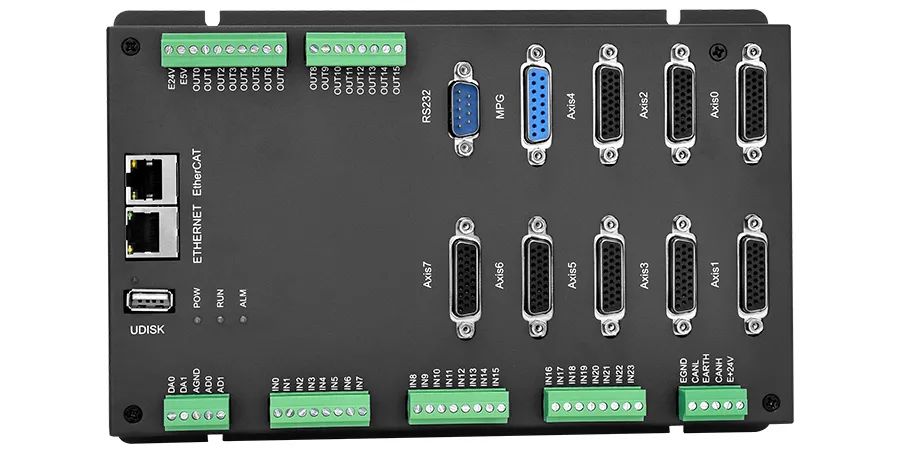
ZMC408CE核心技術采用了先進的FPGA技術,實現硬件位置比較輸出、精準輸出功能,保證連續軌跡加工的出色性能和穩定性,以及動態數據捕獲的實時性,從而實現更加精準控制和提高生產效率和品質。
ZMC408CE支持EtherCAT+脈沖軸混合插補,可脫機或聯機運行,軸數8-32軸可選,支持ZDevelop+多種高級上位機混合編程,可以實現點位運動、電子凸輪、直線插補、圓弧插補、連續軌跡加工和30+種機器人模型的控制。
ZMC408CE產品亮點1.高性能處理器,提升運算速度、響應時間和掃描周期等;
2.一維/二維/三維、多通道視覺飛拍,高速高精;
3.位置同步輸出PSO,連續軌跡加工中對精密點膠膠量控制和激光能量控制等;
4.多軸同步控制,多坐標系獨立控制等;
5.EtherCAT同步周期可快至125us;
6.EtherCAT總線和脈沖軸混合插補;
7.直線插補、任意空間圓弧插補、螺旋插補、樣條插補等;
8.應用靈活,可PC上位機開發,也可脫機獨立運行;
EtherCAT設計目標和優勢
工業現場往往需要穩定并且實時的通信,傳感器和IO信號需要高速響應,電機的數據需要實時傳輸。在EtherCAT之前,就已經有CAN總線等現場總線。
但隨著現場的自動化系統越來越龐大,傳統總線的瓶頸就越來越明顯:帶寬不夠高,傳輸數據量少,無法充分利用IT技術的發展等。所以就誕生了一批基于Ethernet的現場總線,EtherCAT就是其中的佼佼者之一。
EtherCAT總線的官方描述是基于Ethernet的現場總線(如上圖),為什么不直接使用Ethernet呢,因為現場通信的一些特征是和IT領域完全不同的:
1.單個系統擁有大量節點(設備)。
2.這些節點一般需要傳輸數據量比較少,但實時性要求很高。
如果每個節點都用一個Ethernet數據幀來通信的話,最后的通信效率就會非常的低。按照官方的一個計算示例,最終的帶寬利用率可能不到5%,并且,基于Ethernet的通信協議,例如TCP,會帶來額外的帶寬開銷和延遲,大量的帶寬都被無效的數據占用。
EtherCAT的解決方法就是,所有的節點使用一個數據幀,主站發出數據幀后,所有的從站會在飛行中處理數據,讀取自己需要的,塞入自己需要返回的數據,然后繼續把數據幀繼續向下傳輸,直到碰到最后一個節點,利用Ethernet的全雙工特性再將數據返回給主站。
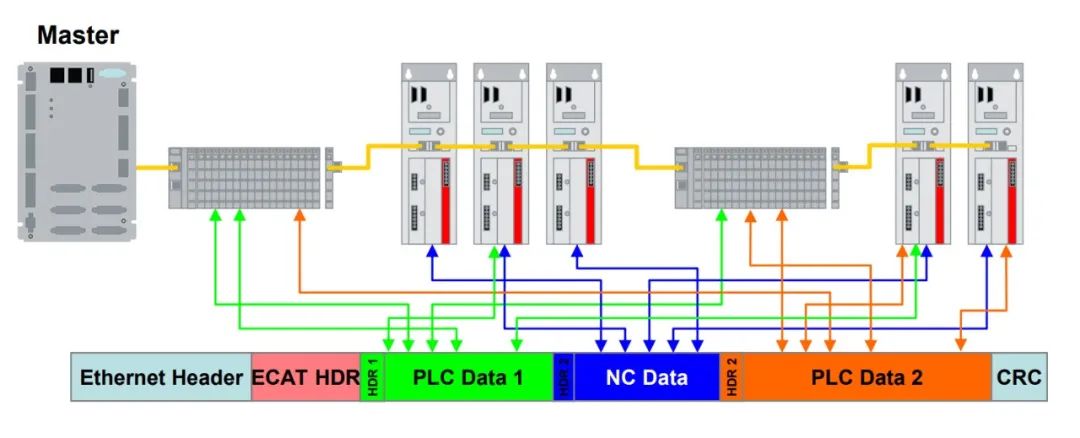
利用這種傳輸方式,數據幀的最大有效數據率(maximum effective data rate)可以超過90%,主站是唯一允許主動發送數據報文的設備,其他節點只能順序傳輸報文,這樣可以避免Ethernet網絡中常見的沖突和延時,保證EtherCAT數據傳輸的實時特性。 并且,從站使用專用芯片(ESC)在飛行中處理數據報文時,完全使用硬件來處理, 使得整個EtherCAT網絡的通信時間保持穩定可預測,和每個從站的不同部署完全無關。
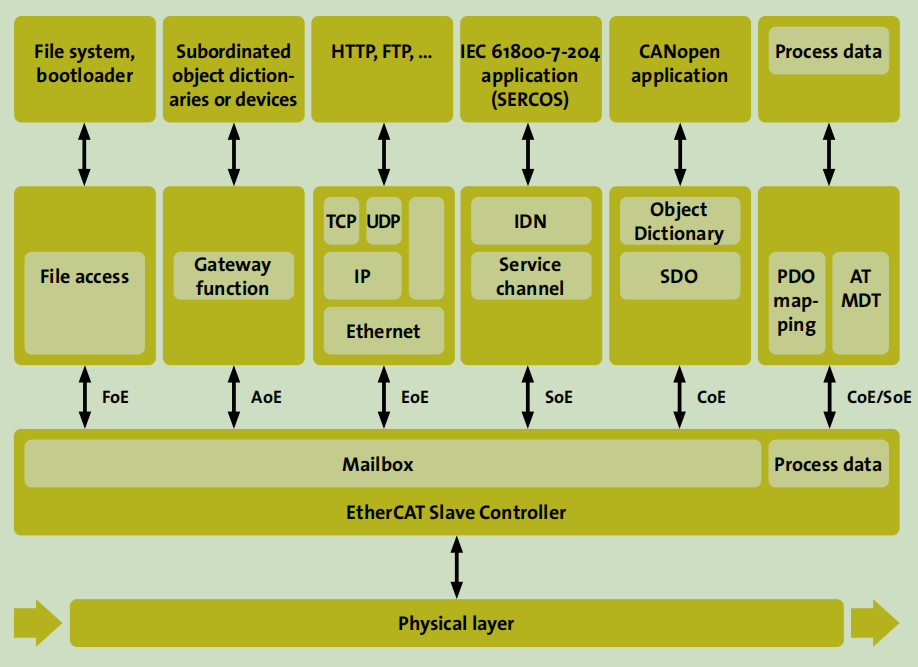
EtherCAT網絡中可以傳輸周期性的數據和非周期性的數據。周期性數據是通過PDO(Process Data Object)來交換的,一般用于實時的數據交換,例如電機的命令位置和反饋位置,IO信號的交互等。 非周期的數據是可以通過郵箱協議來傳輸,最常見的就是CoE(Canopen Over EtherCAT),可以SDO(Service Data Object)來傳輸信息,SDO一般用于非實時的通信,例如電機參數的配置(例如分辨率, 最大電流等),包括從站的PDO配置信息也是通過SDO來傳輸的。 配置PDO就像為你的數據買高鐵票,這樣主站和從站在正式工作之前就已經提前知道了將會有哪些數據上這列高鐵,每過一個從站ESC芯片將會自動取下來對應位置的數據,塞入需要返回的數據。這樣可以最大化的縮減無效的數據,并且加快處理速度。
PDO信息的傳輸周期就是我們經常說的EtherCAT通信周期。例如正運動的常規固件默認都是1ms的周期(1K的通信頻率),正運動部分產品可以設置125us的周期(8K的通信頻率)。為什么默認是1ms而不是更短的周期(更高的頻率)呢?控制器在這1ms內在做什么呢?從站又在做什么呢?
這個要從CSP的工作模式和電機的控制環路說起,后面章節會再詳細介紹。[一般1ms已經足夠小了(1K已經足夠高了)。并且,電機之間的同步不是靠數據幀的到達時間,而是靠分布式時鐘的,可以實現納秒級的同步,上期文章有介紹]。
前面提到,因為EtherCAT數據幀的獨特設計,有效數據率非常高,所以在工業自動化領域可以充分利用起來Ethernet的百兆帶寬,實際上百兆帶寬也可以讓非常多的電機實現1ms的通信周期,例如正運動家就有128軸的控制器(一般人我不告訴他哦)。 那上次留下的一個問題是,既然EtherCAT百兆總線已經這么好了,為什么還要去設計千兆和萬兆總線? 答案是隨著技術的發展,已經出現了更龐大更復雜的系統,例如先進的物流系統或者磁懸浮系統需要非常多的軸(幾百甚至上千),并且這些軸之間需要精確同步;或者需要采集大量傳感器數據的測量設備,都對總線的帶寬提出了更高的要求。 更高的帶寬可以讓現場總線進入更多的應用領域,同樣更強的總線也可以支撐設計以前沒有的復雜系統。 本次,正運動技術EtherCAT和Ethernet的不同點有哪些?通信周期又是什么意思?就分享到這里。
審核編輯 :李倩
-
運動控制器
+關注
關注
2文章
408瀏覽量
24786 -
總線
+關注
關注
10文章
2900瀏覽量
88300 -
ethercat
+關注
關注
18文章
732瀏覽量
38820
原文標題:EtherCAT和Ethernet的不同點有哪些, 通信周期又是什么意思?
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問AD7476和AD7476A的不同點是什么?
EDA產業發展與IC設計產業發展相比,有哪些不同點呢?
伺服驅動器與變頻器有哪些共同點與不同點?
FPGA可編程器件和CPLD可編程器件有哪些相同點和不同點
EtherCAT和Ethernet的不同點有哪些, 通信周期又是什么意思?





 工商網監
工商網監
評論