") 利用下一代PIC18 Q10 MCU的高級(jí)外設(shè)完成更多工作
利用下一代PIC18 Q10 MCU的高級(jí)外設(shè)完成更多工作
下一代PIC18“Q10”系列微控制器具有多個(gè)易于使用的內(nèi)核獨(dú)立外設(shè)(CIP)和智能模擬外設(shè),可滿足期望,并被證明是大多數(shù)嵌入式應(yīng)用的正確選擇。“Q10”MCU 的 CIP 可降低固件復(fù)雜性,提供所需的靈活性,并幫助系統(tǒng)滿足功能安全標(biāo)準(zhǔn)。
應(yīng)用要求
絕大多數(shù)嵌入式應(yīng)用需要的不僅僅是計(jì)算能力。系統(tǒng)性能完全取決于應(yīng)用程序,因?yàn)橐笠驊?yīng)用程序而異。一種應(yīng)用可能需要高精度、快速模擬功能和安全通信;而另一個(gè)應(yīng)用可能是成本驅(qū)動(dòng)的,可能需要在MCU中集成多個(gè)定時(shí)器和通信接口。
最常見(jiàn)的嵌入式系統(tǒng)通常涉及某種類型的傳感、電源轉(zhuǎn)換、閉環(huán)控制和/或某些通信活動(dòng)。一般來(lái)說(shuō),物聯(lián)網(wǎng)是大量智能、數(shù)據(jù)收集、決策設(shè)備,有助于實(shí)現(xiàn)一個(gè)知情的世界;在這個(gè)世界里,我們可以更準(zhǔn)確地預(yù)測(cè)可以精確趨勢(shì)的數(shù)據(jù)。為了促進(jìn)物聯(lián)網(wǎng),最基本的設(shè)備只需要包括一個(gè)安全控制器和一些將數(shù)據(jù)傳輸?shù)皆苹蛴芯€/無(wú)線通信介質(zhì)的方法。因此,所需的MCU選擇完全取決于應(yīng)用,可能不需要巨大的存儲(chǔ)器或高處理能力。
考慮到智能設(shè)備的存在大幅增加,我們與這些設(shè)備的交互始終存在。這些設(shè)備的故障可能是危險(xiǎn)的,因?yàn)槲覀儗?duì)它們的依賴有時(shí)是深刻的。因此,系統(tǒng)必須通過(guò)內(nèi)置安全機(jī)制來(lái)符合某些安全要求,這有助于在需要時(shí)降低潛在風(fēng)險(xiǎn)或?qū)p壞降低到可容忍的水平。
為了實(shí)現(xiàn)嵌入式應(yīng)用的功能安全,整個(gè)系統(tǒng)應(yīng)符合當(dāng)?shù)匕踩ㄒ?guī)和行業(yè)標(biāo)準(zhǔn)制定的標(biāo)準(zhǔn)。作為嵌入式應(yīng)用中的主要部分,微控制器的完整性以及其他部件對(duì)于在惡劣環(huán)境中實(shí)現(xiàn)系統(tǒng)魯棒性至關(guān)重要。
固件及其限制
讓我們考慮一個(gè)在任何應(yīng)用程序中檢測(cè)開(kāi)關(guān)按下事件的簡(jiǎn)單示例。有多種軟件解決方案可用于實(shí)現(xiàn)這一目標(biāo)。但是,所有這些解決方案都需要一種算法和一些處理來(lái)解決去抖動(dòng)問(wèn)題或檢測(cè)多按和長(zhǎng)按事件,從而消耗CPU時(shí)間,功耗,并且很可能是一個(gè)關(guān)鍵優(yōu)先級(jí)的瑣碎中斷服務(wù)例程(取決于交換機(jī)的目的)。
此外,如果要檢測(cè)的不是開(kāi)關(guān)按下,而是檢測(cè)時(shí)間段明顯更小的外部脈沖,事情將變得更加復(fù)雜。錯(cuò)過(guò)了它是最突出的。在檢測(cè)脈沖時(shí),您可能會(huì)經(jīng)常遇到的另一個(gè)挑戰(zhàn)是毛刺。擺脫軟件中的故障始終是一個(gè)挑戰(zhàn),因?yàn)橛袝r(shí)它被評(píng)估為“1”,有時(shí)被評(píng)估為“0”,永遠(yuǎn)不確定。
通過(guò)模數(shù)轉(zhuǎn)換器測(cè)量模擬信號(hào)是許多應(yīng)用最基本的要求之一。這些測(cè)量通常需要對(duì)采集的數(shù)據(jù)進(jìn)行平均和低通濾波。用于消除噪聲的基于軟件的濾波器既耗時(shí)又復(fù)雜,而數(shù)據(jù)平均需要大量?jī)?nèi)存。
延遲是軟件帶來(lái)的另一個(gè)問(wèn)題;即使您以最佳方式確定所有任務(wù)的優(yōu)先級(jí)。優(yōu)先級(jí)相同和較低優(yōu)先級(jí)的任務(wù)必須等到優(yōu)先級(jí)較高的任務(wù)完成。這在某些應(yīng)用中可能對(duì)安全至關(guān)重要。如果某些應(yīng)用程序需要評(píng)估兩個(gè)并發(fā)信號(hào),軟件只能按順序進(jìn)行。在軟件中處理實(shí)時(shí)信號(hào)很困難,因?yàn)镃PU是同步的,這增加了從輸入到輸出的至少一個(gè)時(shí)鐘周期延遲。
在開(kāi)發(fā)應(yīng)用程序時(shí),大量此類并發(fā)癥非常常見(jiàn)。克服它們總是需要復(fù)雜的代碼例程或外部硬件電路,這將增加應(yīng)用程序的開(kāi)發(fā)時(shí)間和成本。為閃存程序添加簡(jiǎn)單的CRC檢查可能是一項(xiàng)非常復(fù)雜的開(kāi)發(fā)和測(cè)試任務(wù)。處理這些復(fù)雜代碼會(huì)消耗 CPU 時(shí)間和功耗。從 CPU 卸載它們可以延長(zhǎng) MCU 的休眠持續(xù)時(shí)間,而計(jì)算不需要 CPU。這有助于降低MCU的平均功耗,這在電池供電應(yīng)用中可能非常關(guān)鍵。
PIC18 “Q10”系列 MCU 及其專用外設(shè)
Microchip最新的PIC18“Q10”系列微控制器經(jīng)過(guò)優(yōu)化,具有集成的智能模擬、可配置外設(shè)和5V操作,可實(shí)現(xiàn)穩(wěn)健的實(shí)時(shí)控制,以實(shí)現(xiàn)抗噪性。
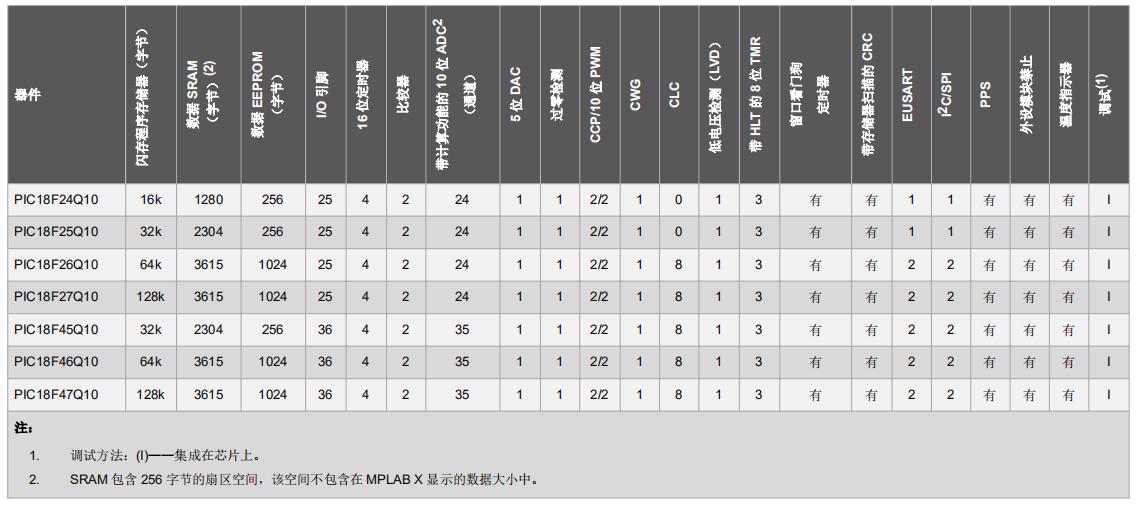
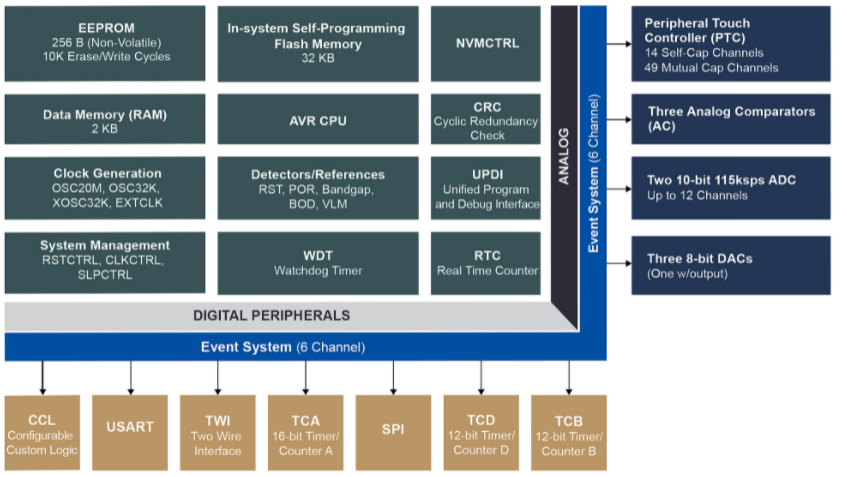
每個(gè)器件都包括一整套內(nèi)核獨(dú)立外設(shè)(CRC /內(nèi)存掃描、可配置邏輯單元、窗口看門(mén)狗定時(shí)器、硬件限制定時(shí)器等)、PWM 和多個(gè)通信接口。此外,該系列還包括智能模擬外設(shè),如過(guò)零檢測(cè)器(ZCD)、片上模擬比較器、數(shù)模轉(zhuǎn)換器(DAC)和帶計(jì)算功能的模數(shù)轉(zhuǎn)換器(ADC2)。ADC2包括硬件電容分壓器(CVD)支持,用于多通道電容式觸摸檢測(cè)。
PIC18 'Q10' MCU 通過(guò)使用其智能模擬和內(nèi)核獨(dú)立外設(shè) (CIP) 促進(jìn)軟件的創(chuàng)新設(shè)計(jì)替代方案。初始化后,CIP 可提供穩(wěn)態(tài)閉環(huán)嵌入式控制,而不會(huì)受到 CPU 的任何干擾。由于它們是獨(dú)立的外設(shè)和CPU獨(dú)立,因此共享數(shù)據(jù)、邏輯信號(hào)和/或模擬信號(hào)的延遲為零。此外,CIP 有助于降低固件復(fù)雜性,從而減輕 CPU 的負(fù)擔(dān)。因此,CIP 使您能夠使用 PIC18 'Q10' MCU 輕松設(shè)計(jì)更復(fù)雜的應(yīng)用。
面向嵌入式應(yīng)用的PIC18 “Q10”MCU
Microchip的PIC18“Q10”系列MCU配備了針對(duì)各種實(shí)時(shí)應(yīng)用的大量外設(shè)。PIC18 'Q10' MCU 通過(guò)穩(wěn)健的硅設(shè)計(jì)和制造工藝為系統(tǒng)提供良好的完整性,有助于提高系統(tǒng)穩(wěn)健性。窗口看門(mén)狗定時(shí)器,用于從失控的代碼中恢復(fù),在應(yīng)用程序中啟用所需的安全功能。安全性是應(yīng)用程序中另一個(gè)備受追捧的功能。片上CRC模塊在通信應(yīng)用中節(jié)省了大量時(shí)間和功耗。內(nèi)存掃描功能為無(wú)線 (OTA) 升級(jí)和系統(tǒng)啟動(dòng)提供固件自檢,防止系統(tǒng)受損。
當(dāng)勤奮使用時(shí),可配置邏輯單元 (CLC) 是一項(xiàng)非常強(qiáng)大的資產(chǎn)。CLC可以配置為任何基本邏輯門(mén)和/或順序元件,以執(zhí)行無(wú)數(shù)的任務(wù)。例如,在讀取小周期脈沖時(shí),通過(guò)使用D觸發(fā)器配置中的CLC可以完全避免毛刺。對(duì)于CLC來(lái)說(shuō),讀取兩個(gè)并發(fā)信號(hào)是一帆風(fēng)順的,因此任何數(shù)字邏輯也可以建立在這兩個(gè)輸入信號(hào)上,如OR,AND和NOR等。給出所需的輸出。CLC 可以與自身、其他 CLC 和/或其他外圍設(shè)備結(jié)合使用。這種多功能性使您可以靈活地創(chuàng)建創(chuàng)新設(shè)計(jì)。編碼器、解碼器、計(jì)數(shù)器、脈沖擴(kuò)展器、環(huán)形轉(zhuǎn)換器、有限狀態(tài)機(jī)等應(yīng)用都可以使用 CLC 輕松實(shí)現(xiàn)。
回到開(kāi)關(guān)去抖動(dòng)問(wèn)題,檢測(cè)開(kāi)關(guān)按下事件所需的魯棒去抖動(dòng)機(jī)制也可以通過(guò)定時(shí)器外設(shè)的硬件限制定時(shí)器(HLT)功能來(lái)實(shí)現(xiàn),而無(wú)需任何固件邏輯實(shí)現(xiàn)。定時(shí)器可以檢測(cè)開(kāi)關(guān)按下的上升或下降(或兩者,如果需要),然后在所需的預(yù)編程延遲后生成事件(以克服去抖動(dòng)波動(dòng))。CLC 還可用于實(shí)現(xiàn)交換機(jī)去抖動(dòng)邏輯。硬件限位定時(shí)器(HLT)在安全關(guān)鍵應(yīng)用中也很有用,可以檢測(cè)潛在的故障情況并采取適當(dāng)?shù)募m正措施將系統(tǒng)從故障狀態(tài)中恢復(fù),這有助于系統(tǒng)以可預(yù)測(cè)的方式運(yùn)行。
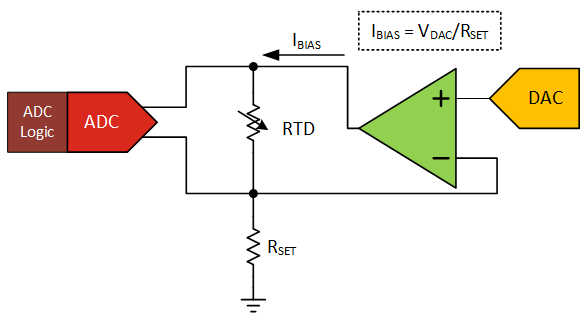
在處理模擬信號(hào)時(shí),智能模擬外設(shè)(如帶CVD、比較器和ZCD的ADC2)非常方便。ADC2模塊內(nèi)置的后處理計(jì)算功能使您能夠僅在硬件級(jí)別執(zhí)行平均值、突發(fā)平均值、過(guò)采樣、低通濾波、最小/最大閾值檢測(cè)以及更多操作。結(jié)合CVD技術(shù),ADC2模塊還可用于人機(jī)界面(HMI)應(yīng)用中的電容式觸摸檢測(cè)。您可以在設(shè)計(jì)中添加直觀的觸摸按鈕,避免使用外部觸摸模塊。
模擬比較器和ZCD也是模擬信號(hào)處理應(yīng)用中非常有用的外設(shè)。兩個(gè)外設(shè)都提供瞬時(shí)信號(hào)電平檢測(cè),因?yàn)樗鼈兣cCPU異步,因此沒(méi)有輸出延遲。
CIP 旨在根據(jù)您編寫(xiě)、調(diào)試、測(cè)試和集成到整個(gè)系統(tǒng)中的軟件代碼自動(dòng)執(zhí)行通常由 CPU 執(zhí)行的任務(wù)。帶有 CIP 的 PIC18 “Q10” 提供更多的睡眠時(shí)間余量,無(wú)需擔(dān)心控制方案可能會(huì)產(chǎn)生競(jìng)爭(zhēng)中斷,從而忽略一個(gè)中斷。它減少了軟件和中斷的數(shù)量,釋放了CPU,并允許降低工作頻率以降低功耗。CIP 和“Q10”的智能模擬外設(shè)是下一代解決方案,可與緊湊型單核 MCU 并行執(zhí)行事件。
開(kāi)發(fā)生態(tài)系統(tǒng)
在任何新設(shè)計(jì)中使用加載功能的PIC18“Q10”MCU都是無(wú)縫且直接的。PIC18 'Q10' 系列 MCU 由 MPLAB X 集成開(kāi)發(fā)環(huán)境 (IDE) 和基于云的 MPLAB Xpress IDE 提供支持。MPLAB X IDE 具有許多功能,可在設(shè)計(jì)階段增強(qiáng)開(kāi)發(fā)和調(diào)試體驗(yàn),并提供單一集成環(huán)境來(lái)開(kāi)發(fā) PIC 和 AVR MCU 的應(yīng)用。直觀的 MPLAB 代碼配置器 (MCC) 可作為 MPLAB X 的插件提供,提供圖形編程環(huán)境,只需單擊幾下即可生成易于理解的 C 代碼,為您節(jié)省大量時(shí)間和精力。這個(gè)全面且易于使用的開(kāi)發(fā)生態(tài)系統(tǒng)有助于縮短整體設(shè)計(jì)周期和上市時(shí)間。與以前的PIC MCU的引腳對(duì)引腳兼容性確保您可以輕松遷移到“Q10”系列MCU,以增強(qiáng)現(xiàn)有產(chǎn)品的功能,而無(wú)需進(jìn)行大量的重新設(shè)計(jì)。
Microchip的“Curiosity Nano”和“Curiosity HPC”開(kāi)發(fā)板可用于啟動(dòng)使用“Q10”系列MCU的開(kāi)發(fā)和快速原型設(shè)計(jì)。Curiosity板從頭開(kāi)始設(shè)計(jì),以利用Microchip的MPLAB X和MPLAB Xpress開(kāi)發(fā)環(huán)境,包括一個(gè)集成的編程器/調(diào)試器,不需要額外的硬件即可開(kāi)始使用。
總結(jié)
PIC18 'Q10' 系列 MCU 將 PIC CPU、CIP、智能模擬外設(shè)和通信外設(shè)等完美結(jié)合,以開(kāi)發(fā)具有高性能、完整性、設(shè)計(jì)靈活性和低功耗的系統(tǒng)。獨(dú)特的功能集和外設(shè)組合使其成為眾多應(yīng)用的優(yōu)質(zhì)微控制器,包括但不限于工業(yè)過(guò)程控制、家用電器、傳感器節(jié)點(diǎn)、醫(yī)療、人機(jī)界面、無(wú)線連接、電機(jī)控制和汽車。因此,讓我們開(kāi)始為您的下一個(gè)應(yīng)用程序構(gòu)建下一代智能設(shè)備。
審核編輯:郭婷
-
微控制器
+關(guān)注
關(guān)注
48文章
7646瀏覽量
151905 -
mcu
+關(guān)注
關(guān)注
146文章
17316瀏覽量
352278 -
嵌入式
+關(guān)注
關(guān)注
5090文章
19176瀏覽量
306975
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
PIC18的配置位問(wèn)題!急求!!!
【下載】《PIC項(xiàng)目實(shí)戰(zhàn):基于PIC18》
有USB與PIC18有MSD設(shè)置嗎?
微芯片8位MCU ARPIC10、PIC12、PIC16、PIC18是什么意思?
PIC18C高檔MCU系列參考手冊(cè)

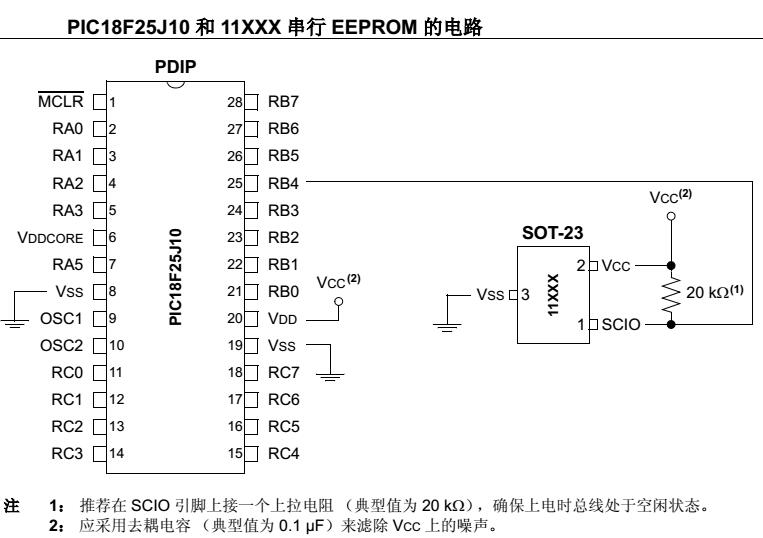
使用C18編譯器和定時(shí)器連接PIC18 MCU和兼容UNI/O?總線的串行EEPROM
Microchip PIC18 Explorer開(kāi)發(fā)板
貿(mào)澤電子攜手Microchip帶來(lái)“PIC18 Q10系列MCU介紹”直播課程
美國(guó)微芯科技下一代PIC18-Q43系列產(chǎn)品有助于提升噪聲抑制能力
PIC18微控制器系列的數(shù)據(jù)手冊(cè)免費(fèi)下載
帶觸摸界面和IR通信的電機(jī)控制

PIC18 Q10產(chǎn)品系列入門(mén)
8位MCU處理閉環(huán)控制應(yīng)用
PIC18-Q71系列的智能模擬特性





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論