 基于STM32F103的CH101驅動程序移植
基于STM32F103的CH101驅動程序移植
有許多朋友在移植CHX01超聲波傳感器的過程中可能會遇到一些挑戰,因此本文將重點介紹一些核心問題。雖然本來有想以手把手的方式來教授如何移植,但是由于之前移植的時候沒有保存具體過程中的圖文,所以需要花費很長的時間來重新完成這項工作。文末也提供了獲取資源的接口,以幫助大家解決移植中出現的問題。
01準備資料
1. 從官網獲取 SmartSonic_HelloChirp_Example_v1_31_0.exe
源碼(CHx01 官網源碼的硬件平臺 MCU: ATSAMG55;IDE:Microchip Studio)
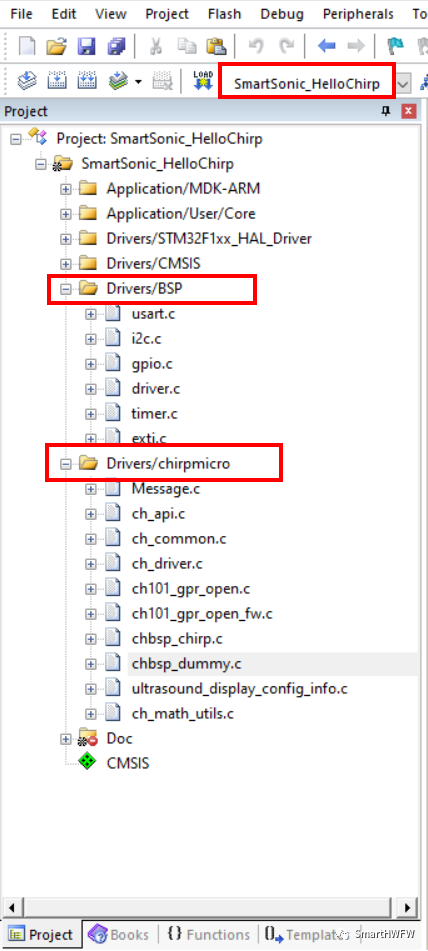
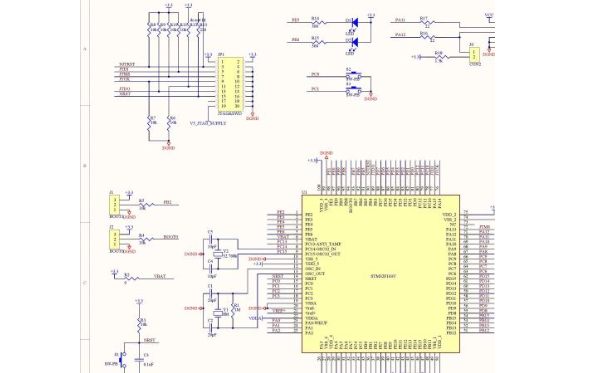
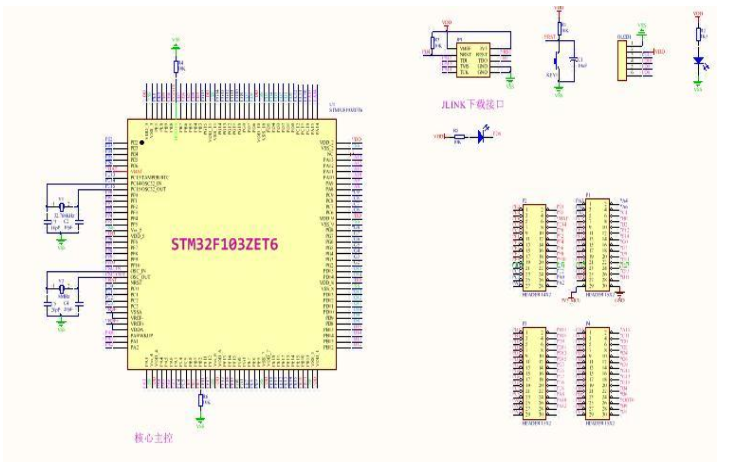
2. 獲取一個 STM32F103CB 的例程,比如我直接使用 STM32CubeF1 的模板。(當然你也可以用 STM32CubeIDE 創建一個工程)在這之前,假設你已經掌握了 Keil IDE 工程下的文件添加、編譯等操作。比如,如下截圖,我精簡了STM32CubeF1 的模板,將工程名稱修改為:SmartSonic_HelloChirp,并在工程下新建了 Drivers/BSP 和 Drivers/chirpmicro 兩個Groups。
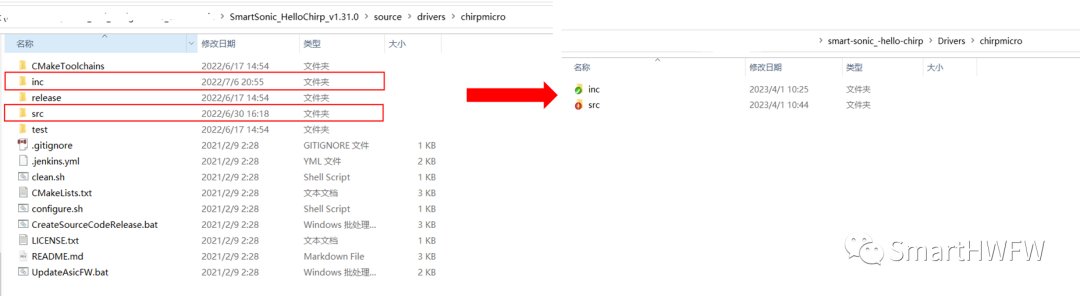
3. 將SmartSonic_HelloChirp_Example_v1_31_0文件中
SmartSonic_HelloChirp_v1.31.0sourcedriverschirpmicro路徑下的src 和 inc 文件夾拷貝到自己的STM32工程的smart-sonic_-hello-chirpDriverschirpmicro目錄下
02API接口封裝
我在之前的文章《超聲波傳感器(CHx01) 學習筆記 Ⅲ-API介紹》中提到所需API接口的相關內容。同樣,在官方提供的例程中有一個 chbsp_dummy.c 文件,它使用 `attribute((weak))` 的方式提供了可選板支持包IO功能的虛擬實現,可以讓平臺依據需求來支持所需的功能。這種 `attribute((weak))` 例程能夠滿足來自其他代碼的引用,避免鏈接出現錯誤,但它們不會執行任何操作。所有板卡支持包接口的詳細信息,包括這些可選功能,都可以在 chirp_bsp.h 中找到。
/* Functions supporting debugging */ __attribute__((weak)) void chbsp_debug_toggle(uint8_t __attribute__((unused)) dbg_pin_num) {} __attribute__((weak)) void chbsp_debug_on(uint8_t __attribute__((unused)) dbg_pin_num) {} __attribute__((weak)) void chbsp_debug_off(uint8_t __attribute__((unused)) dbg_pin_num) {} __attribute__((weak)) void chbsp_print_str(char *str) { (void)(str); } __attribute__((weak)) uint32_t chbsp_timestamp_ms() { return 0; } __attribute__((weak)) int chbsp_i2c_deinit(void){ return 0; } /* Functions supporting interrupt-based operation */ __attribute__((weak)) void chbsp_group_io_interrupt_enable(ch_group_t *grp_ptr) { (void)(grp_ptr); } __attribute__((weak)) void chbsp_io_interrupt_enable(ch_dev_t *dev_ptr) { (void)(dev_ptr); } __attribute__((weak)) void chbsp_group_io_interrupt_disable(ch_group_t *grp_ptr) { (void)(grp_ptr); } __attribute__((weak)) void chbsp_io_interrupt_disable(ch_dev_t *dev_ptr) { (void)(dev_ptr); } /* Functions supporting non-blocking operation */ __attribute__((weak)) int chbsp_i2c_write_nb(ch_dev_t *dev_ptr, uint8_t *data, uint16_t num_bytes) { (void)(dev_ptr); (void)(data); (void)(num_bytes); return 1; } __attribute__((weak)) int chbsp_i2c_mem_write_nb(ch_dev_t *dev_ptr, uint16_t mem_addr, uint8_t *data, uint16_t num_bytes) { (void)(dev_ptr); (void)(mem_addr); (void)(data); (void)(num_bytes); return 1; } __attribute__((weak)) int chbsp_i2c_read_nb(ch_dev_t *dev_ptr, uint8_t *data, uint16_t num_bytes) { (void)(dev_ptr); (void)(data); (void)(num_bytes); return 1; } __attribute__((weak)) int chbsp_i2c_mem_read_nb(ch_dev_t *dev_ptr, uint16_t mem_addr, uint8_t *data, uint16_t num_bytes) { (void)(dev_ptr); (void)(mem_addr); (void)(data); (void)(num_bytes); return 1; } /* Functions supporting controlling int pins of individual sensors (originally only controllable in a group) */ __attribute__((weak)) void chbsp_set_io_dir_out(ch_dev_t *dev_ptr) { (void)(dev_ptr); } __attribute__((weak)) void chbsp_set_io_dir_in(ch_dev_t *dev_ptr) { (void)(dev_ptr); } __attribute__((weak)) void chbsp_io_clear(ch_dev_t *dev_ptr) { (void)(dev_ptr); } __attribute__((weak)) void chbsp_io_set(ch_dev_t *dev_ptr) { (void)(dev_ptr); } __attribute__((weak)) void chbsp_external_i2c_irq_handler(chdrv_i2c_transaction_t *trans){ (void)(trans); }
超聲波傳感器(CHx01) 學習筆記 Ⅱ- I2C讀寫操作》中有詳細的介紹,按照上述API接口逐個封裝函數內容即可。
03API接口驗證
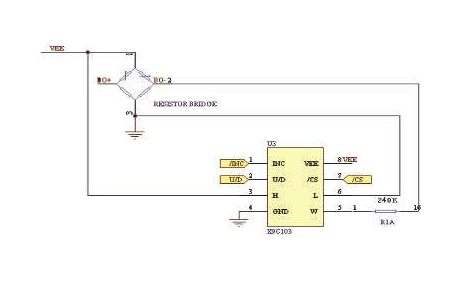
假設你已經將MAX3378EEUD和74LVC1T45用于IO口電平轉換,接下來就是如何獲取傳感器的固定ID,以此來驗證I2C通信接口的正確性。獲取ID的方式可以幫助我們更好地驗證I2C通信接口的封裝正確性。
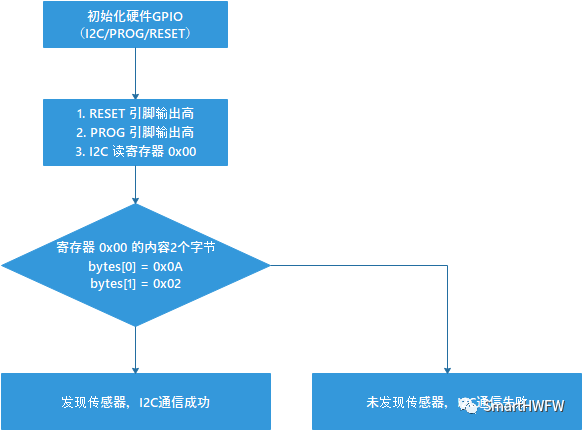
獲取傳感器 ID流程圖

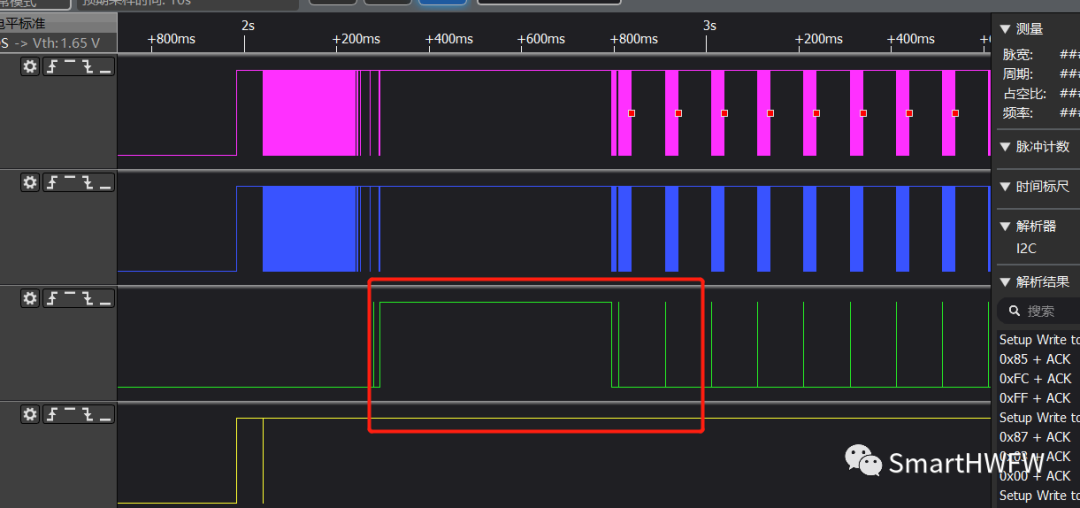
獲取傳感器 IDI2C讀時序圖
04關鍵API接口介紹
`int chbsp_i2c_mem_read(ch_dev_t *dev_ptr, uint16_t mem_addr, uint8_t *data, uint16_t num_bytes)`
這個 API 使用內存尋址從I2C從機讀取字節。需要封裝成一個,指定一個字節寄存器地址并從Slave讀取多個字節的函數。
與 STM32 HAL庫相關的函數是:HAL_I2C_Mem_Read(&hi2c1, Address << 1, RegisterAddr, 1, (uint8_t *)(uint32_t)RegisterValue, (uint16_t)RegisterLen, 1000)
`int chbsp_i2c_read(ch_dev_t *dev_ptr, uint8_t *data, uint16_t num_bytes)`
這個 API 是原始的I2C從機讀取字節。需要封裝成一個,從Slave讀取多字節的函數。
與 STM32 HAL庫相關的函數是:HAL_I2C_Master_Receive(&hi2c1, (Address << 1), (uint8_t *)(uint32_t)data, (uint16_t)len, 1000)
`int chbsp_i2c_mem_write(ch_dev_t *dev_ptr, uint16_t mem_addr, uint8_t *data, uint16_t num_bytes)`
這個 API 使用內存尋址將字節寫入I2C從機。需要封裝成一個,指定一個字節寄存器地址并將多個字節寫入從機的函數。
與 STM32 HAL庫相關的函數是:HAL_I2C_Mem_Write(&hi2c1, Address << 1, RegisterAddr, 1, (uint8_t *)(uint32_t)RegisterValue, (uint32_t)RegisterLen, 1000)
`int chbsp_i2c_write(ch_dev_t *dev_ptr, uint8_t *data, uint16_t num_bytes)`
這個 API 是原始的將字節寫入I2C從機。需要封裝成一個,將多字節寫入從機的函數。
與 STM32 HAL庫相關的函數是:HAL_I2C_Master_Transmit(&hi2c1, (Address << 1), (uint8_t *)(uint32_t)data, (uint32_t)len, 1000)
`void chbsp_delay_ms(uint32_t num_ms)`
`void chbsp_delay_us(uint32_t us)`
這兩個延時函數要精準,尤其是 chbsp_delay_ms 毫秒延時,會直接影響傳感器的輸出頻率。
下面這兩個函數,我們無需自行封裝任何內容,但是它們非常重要。
`int chdrv_group_detect_and_program(ch_group_t *grp_ptr)`
這個函數用來檢測、編程和啟動傳感器。對于每個檢測到的傳感器,會將傳感器固件被編程到設備中,并設置應用程序I2C地址。然后傳感器復位并開始執行。
一旦啟動,傳感器設備將開始內部初始化和自檢序列。chdrv_group_wait_for_lock()函數可用于等待此序列在設備上完成。此函數完成后,將使設備的PROG引腳解除。
`void chdrv_group_measure_rtc(ch_group_t *grp_ptr)`
這個函數用來 校準傳感器實時時鐘。在這個函數里 觸發IO引腳上的脈沖 時與選擇的主處理器的時鐘相關。
此函數在INT 引腳上向傳感器設備發送一個脈沖(由主機MCU定時),然后回讀每個單獨設備上該脈沖期間經過的傳感器RTC周期的計數。結果存儲在每個設備的ch_dev_config結構中,隨后在范圍計算期間使用。
脈沖的長度為dev_ptr->rtc_cal_pulse_ms毫秒(通常為100)。此值在ch_init()期間設置。
如果有多個傳感器時,校準脈沖會同時發送到所有設備。因此,所有連接的設備將看到相同的參考脈沖長度。
還需要實現兩個外設功能
定時器,定時周期100ms,在定時器回調函數中周期性調用
`int chdrv_group_hw_trigger(ch_group_t *grp_ptr)` 啟動硬件觸發模式下開始測量。
int chdrv_group_hw_trigger(ch_group_t *grp_ptr) 函數通過簡單地檢測INT 引腳上每個傳感器開始被觸發的測量。在調用此函數之前,每個傳感器必須已置于硬件觸發模式。
GPIO外部中斷,在外部中斷回調函數中調用
`sensor_int_callback()` 檢測傳感器的中斷信號。每次調用此函數時,都會在data_ready_devices變量中設置一個位以標識中斷設備。當傳感器產生中斷(通過與active_devices變量比較找到)時,DATA_READY_FLAG被設置。該標志將在main()循環中檢測到。
一個完成的硬件觸發INT硬件,并接收傳感器返回的INT信號的時序圖
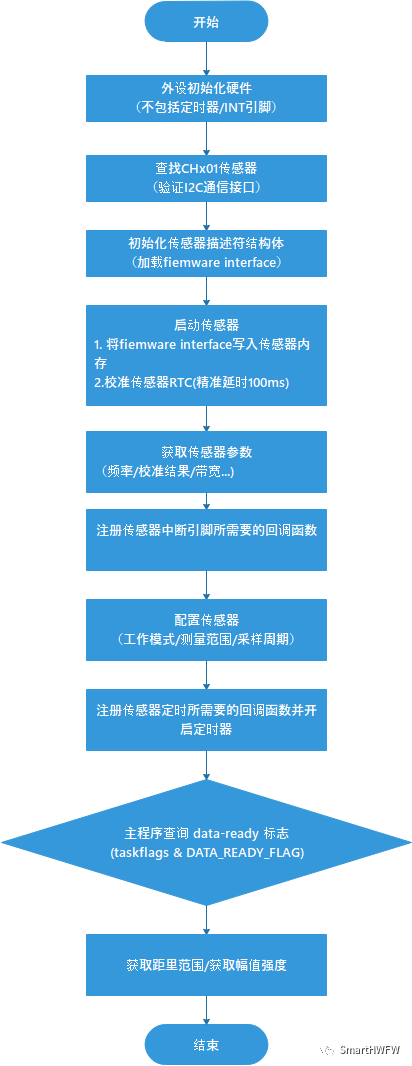
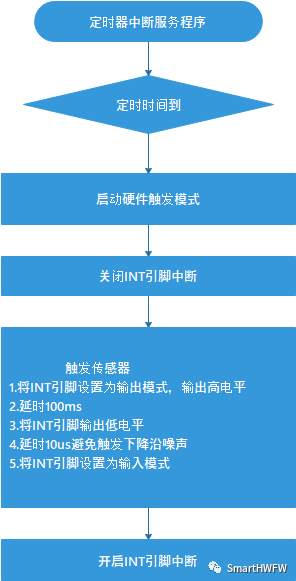
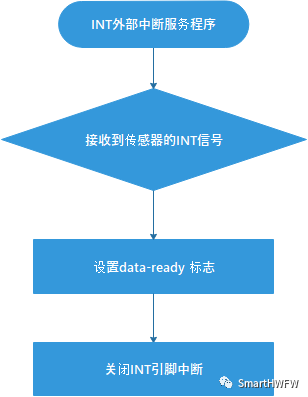
05程序流程圖
主程序
定時器服務程序
INT外部中斷服務程序
-
mcu
+關注
關注
146文章
17316瀏覽量
352223 -
接口
+關注
關注
33文章
8691瀏覽量
151682 -
STM32
+關注
關注
2270文章
10923瀏覽量
357071 -
移植
+關注
關注
1文章
382瀏覽量
28161 -
STM32F103
+關注
關注
33文章
479瀏覽量
63790
原文標題:基于STM32F103的CH101驅動程序移植
文章出處:【微信號:SmartHWFW,微信公眾號:SmartHWFW】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32F103控制ad7606采集程序分享


淺談CC1101驅動在STM32F103的移植
在GD32F103移植STM32F103代碼






 工商網監
工商網監
評論