 PWM控制下電壓反饋和電流反饋簡介
PWM控制下電壓反饋和電流反饋簡介
脈沖寬度調制(PWM)控制有兩種基本類型。它們的區別在于反饋回路的表現或者說什么是被控制的變量。一種控制技術是電壓控制(電壓模式),其中占空比δ正比于實際輸出電壓與 參考電壓的差值。而在電流控制(電流模式)中,占空比δ正比于參考電壓與一個電流有關的電壓之間的差值,在非隔離型拓撲中這個電流是通過功率開關的電流,而在隔離型拓撲中 這個電流是初級繞組電流。
一個穩壓器只通過調節占空比對負載電壓的變化做出響應。由于它不直接測量負載電流或者 輸入電壓,如果負載電流或輸入電壓有任何的變化,負載電壓都需要一段時間才能響應。這個延遲對開關穩壓器的控制表現是有影響的,所以一般需要一個或多個時鐘周期來確保穩定 性。為了避免信號過沖或不穩定的輸出電壓,反饋回路是需要補償的。
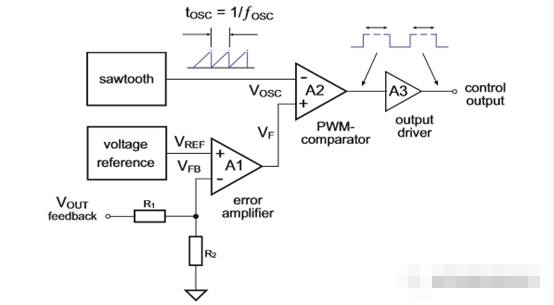
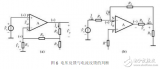
一個典型的電壓模式PWM控制器如圖所示。在這個電路中,A1是誤差放大器,A2是PWM比較器,A3是可選用的輸出驅動器,它的功能是控制功率開關的接口。一個振蕩器生成周期性的鋸 齒波電壓VOSC,在開關穩壓器的時鐘周期開始的時候它的值是零,然后線性增長直至這個時鐘 周期結束。誤差放大器A1比較的是一個非常精確的有溫度補償的參考電壓(VREF)與一個按比 例降低的DC-DC轉換器的輸出電壓之間(VFB=VOUT×R2/(R1+R2))的差值。
誤差放大器A1的輸出電壓VF正比于VREF和VFB的差值。在每個時鐘周期開始時,VFB低于VREF,誤 差放大器的輸出VF和比較器A2的輸出都是高電平的。隨著轉換器的輸出電壓變大,VF逐漸變 小直至低于正在上升的VOSC電壓,自此以后,在接下來的周期里A2的輸出都是低電平的。這就 說明了為什么占空比的變化和輸出電壓的變化是相反的(負反饋)。負反饋控制回路是穩定的。
電壓模式的PWM控制器可能出現過沖,過度修正或者反向過沖,導致輸出電壓在一個高于或低于額定值的電位震蕩。因此一般通過刻意減慢反饋響應的速度來避免轉換器的這些表現。這么做的缺點是轉換器對突然出現在負載或輸入電壓的變化的反應速度略慢。
如果需要一個反應速度很快的PWM控制器來加速階躍響應(瞬態響應)的速度,那么可以用電流控制(電流模式)來彌補電壓模式的這個缺點。
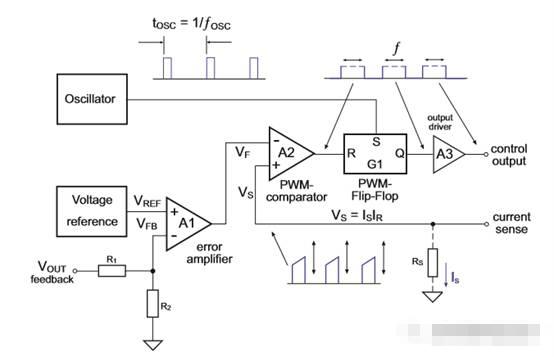
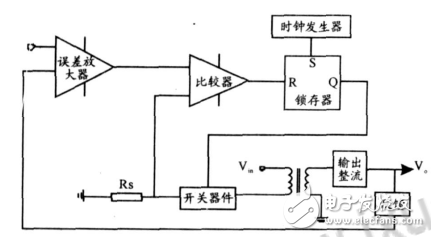
在電流模式控制的DC-DC轉換器中,控制回路被分成兩個反饋回路,一個是控制電流的內部控制回路,另一個是控制電壓的外部控制回路。對每個脈沖,不僅輸出電壓的改變而且負載電 流的改變都可以得到補償。一個典型的電流模式PWM控制器如圖所示。如同電壓控制電 路,A1是誤差放大器,A2是PWM比較器,A3可選用的輸出驅動器,不同的是電流控制器中多了一個觸發器(flip-flop)G1。另一個振蕩器生成頻率為f的同步脈沖,一般這個頻率要遠遠高于fosc。在每個周期開始的時候,這個脈沖啟動觸發器。
與電壓模式PWM控制器一樣,誤差 放大器A1產生一個由VREF和VFB的差值所決定的輸出電壓,周期開始時,PWM輸出電壓是高電平 的。導通電流IS(功率開關中的電流或初級繞組中的電流),流經感應電阻RS,這個電阻兩端 的電壓是VS=RS×IS。隨著轉換器的輸出電壓逐漸上升,導通電流也開始上升直到感應電阻上的電壓超過誤差放大器的輸出電壓VF,這時PWM比較器的輸出變為高電平,重置觸發器并且關閉PWM的輸出直至下一個周期開始。
電流模式穩壓器中占空比的變化和輸出電壓的變化也是相反的,所以反饋回路也是穩定的。但是它有另一個優點就是外部電壓控制回路設定了一個閥值,當到達這個閥值時內部電流控制回路開始調節開關或初級繞組中的電流尖峰。因為輸入電流是與輸出電流成正比的,如果 輸出電流突然變化,初級繞組中的電流也會隨之變化,電流模式PWM將在一個周期內對這個電流變化作出反應。因此仍然可以減慢外部電壓控制回路的反應速度來避免輸出電壓的偏離震 蕩問題,但是這種轉換器可以對于輸出電流變化立即做出反應。
電流模式的一個缺點是由于增加了額外的感應電阻,轉化器的效率會降低。為了減少功耗, 這個電阻必須盡可能的小,但是這個電阻又必須足夠大從而可以為比較器提供一個足夠清晰的輸入。事實上電流模式PWM的比較器相對電壓模式的比較器必須有更高的質量,輸入端的漂移偏差必須更小,對溫度變化的穩定性必須更高。
-
控制器
+關注
關注
112文章
16444瀏覽量
179068 -
穩壓器
+關注
關注
24文章
4256瀏覽量
94045 -
PWM
+關注
關注
114文章
5197瀏覽量
214585 -
DC-DC
+關注
關注
30文章
1957瀏覽量
81904 -
電流反饋
+關注
關注
0文章
38瀏覽量
11885
發布評論請先 登錄
相關推薦
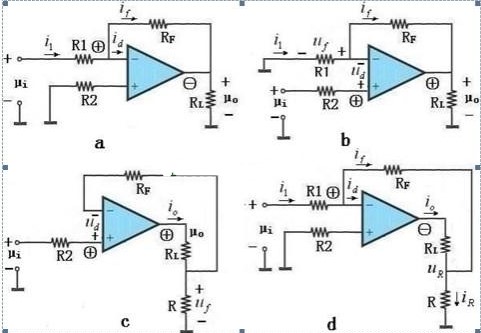
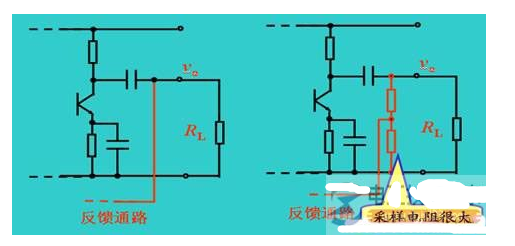
運放電路中的反饋是什么,如何判斷是電流還是電壓反饋
如何區分運放反饋是電壓還是電流反饋?
基于PWM反饋的電源控制策略
開關電源五種 PWM 反饋控制模式






 工商網監
工商網監
評論