 鳳凰動力AGV舵輪AGV驅動輪結構及工作原理詳解
鳳凰動力AGV舵輪AGV驅動輪結構及工作原理詳解
AGV舵輪是一種用于控制AGV行駛方向的重要部件。它通常由電機、減速箱、回轉支承、輪子、齒輪和軸承等配件組成。
●AGV舵輪的工作原理是:通過電機驅動齒輪轉動,齒輪再帶動軸承和輪輞一起旋轉,從而使整個舵輪轉動。當AGV需要改變行進方向時,控制系統會發送信號給舵輪電機,使其旋轉到相應的角度,從而改變車體的行進方向。
●由于AGV舵輪具有靈活性和精度高等特點,因此在自動化物流、智能制造等領域得到了廣泛應用。
AGV舵輪基本組成機構
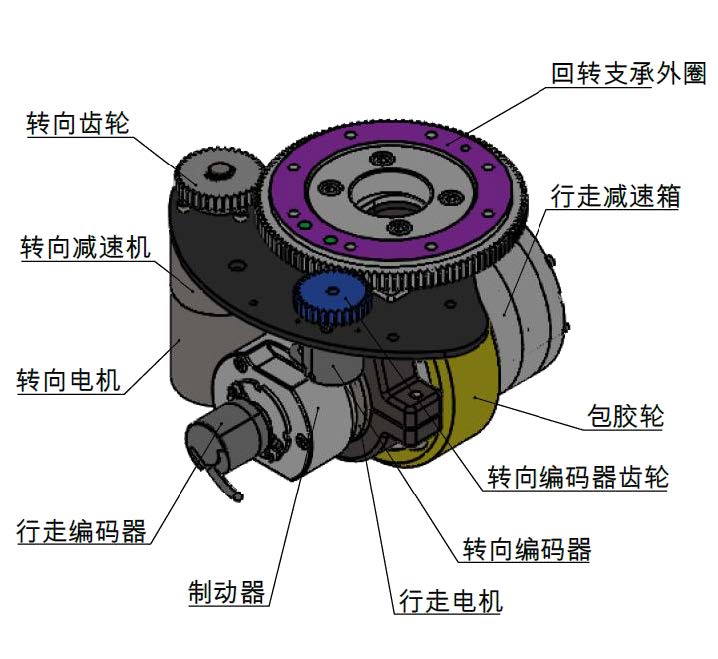
●舵輪總成基本組成機構:行走機構和轉向機構。
●行走機構包含:行走電機、行走減速箱、包膠輪、制動器、反饋單元。
●轉向機構包含:回轉支承、轉向齒輪、轉向減速機、轉向電機、電子限位、機械限位裝置、反饋單元。
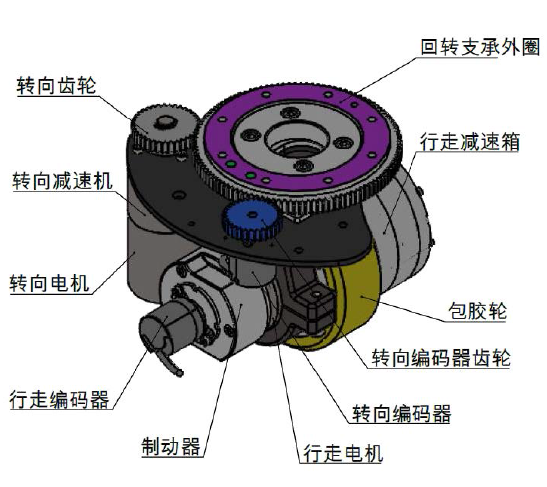
結構示意圖1
●行走電機:行走電機與行走減速箱連接,電機工作產生的扭矩,通過行走減速箱放大,在包膠輪上輸出車輛前進所需的扭矩,包膠輪與地面摩擦產生推力,推動車輛前進或后退。
●制動器:制動器用于停車后駐車制動,防止車輛或設備移動;嚴禁電機轉速高于100rpm 時制動。圖中行走電機和制動器同軸,與電機轉速相同,制動器制動后扭矩直接作用于電機軸。圖中回轉支承外圈,安裝在車體上與車體相對固定;舵輪轉向時,其他部件繞回轉支承中心轉動。圖中回轉支承是舵輪與車體安裝連接的部件,安裝面位于回轉支承外圈,見紫色顯示部分;安裝孔為8 個M8 的螺紋孔(見結構示意圖2)。
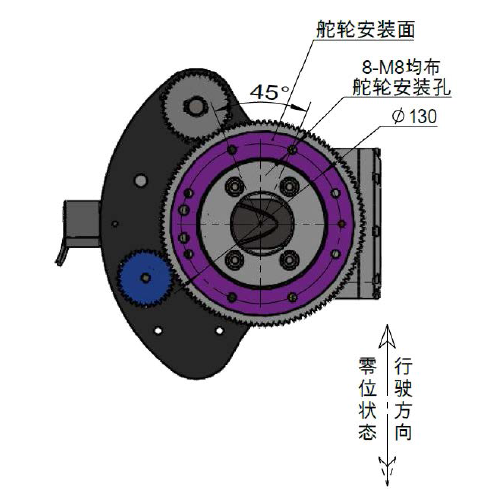
結構示意圖2
如圖所示,舵輪0位狀態使用時,車輛直行,在舵輪驅動力作用下可以實現前進和后退。通過控制轉向電機,可調整舵輪行進方向。
車輛需要轉向時,控制程序控制轉向電機轉動,轉向電機的扭矩經過轉向減速箱、轉向齒輪傳動,使得舵輪的行進方向達到預設的偏轉角度,配合行走部分產生的推力,實現車輛的轉向、橫移、原地轉向等功能。
圖中限位螺栓(見結構示意圖3)固定在回轉支承外圈的下部,用于舵輪轉向時先后觸發電子限位和機械限位。
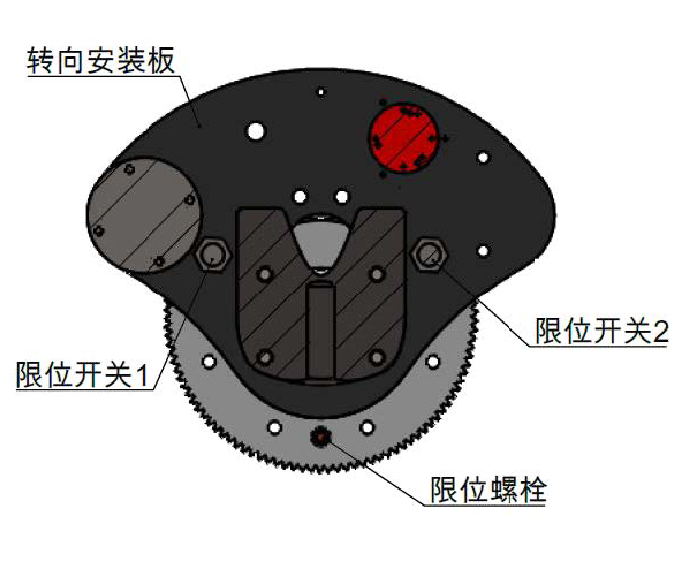
●右側限位開關在舵輪向右轉向時,到達限位角度會檢測到限位螺栓,觸發右側電子限位。
●左側限位開關在舵輪向左轉向時,到達限位角度會檢測到限位螺栓,觸發左側電子限位。
●正常工作和運行時,舵輪轉向不會到達機械限位位置。為了防止電子限位失效、程序異常等情況,舵輪轉向到機械限位角度時,機械限位將阻擋舵輪進一步轉向。
警告:出現機械限位的狀況時,轉向電機電流會大幅增加,請在控制程序中設定過流保護,保護轉向電機和轉向機構所有配件,防止異常損壞。
圖中轉向反饋單元,用于反饋信號給控制程序計算舵輪的轉向角度,可以是轉向電機的霍爾反饋,也可以是轉向編碼器;行走反饋單元,用于反饋信號給控制程序計算車輛的行駛速度和距離等,可以是行走電機的霍爾反饋,也可以是行走編碼器。
AGV舵輪總成工作原理綜述:
●行走機構可以實現較大的扭矩輸出,為車輛提供驅動力,制動器可以完成駐車制動或設備異常狀況下的緊急制動;轉向機構可以通過程序控制舵輪的行走方向,進而改變車輛的行駛方向,使車輛匹配導航路徑進行移動。AGV 等自移動設備,安裝一個舵輪可以實現前進、后退、左右轉向功能,安裝雙舵輪或多組舵輪可以通過程序控制實現二維平面任意方向移動。
蘇州鳳凰動力工業有限公司創立于2005年,本部位于江蘇省昆山市花橋鎮金捷路1號。
我公司是國內較早專業從事AGV/AMR舵輪、電驅動輪總成研發與生產的企業,主要產品包括臥式驅動輪、臥式舵輪、立式驅動輪、立式舵輪、重載AGV專用曲軸腳輪、高精密型腳輪萬向輪。電驅動輪及舵輪功率范圍0.2KW~50KW、輪徑范圍150mm~600mm、載重范圍300KG~20000KG,幾乎涵蓋了工業領域各類電驅動移動設備的需求,客戶選型游刃有余,并且還可以滿足客戶個性化的定制需求,為客戶打造專屬化產品。
自創立以來,我公司已經為超過1800家客戶提供了完整的電驅動解決方案,涉及軍工、航運碼頭、機場、建筑、鋼鐵、汽車、工業車輛、紡織、機械制造、電子制造等多個行業。取得各種專利40多項,建立起電機、齒輪、驅動控制系統等核心零部件優秀的供應鏈基礎,完成了標準化、模塊化、定制化、集成化、系統化、智能化初步架構,為提供優質的OEM、ODM整體解決方案打下了堅實的基礎。
我公司緊緊依托于國家工業4.0的戰略布局,不斷持續加大研發與技術的投入,極致追求客戶效益最大化,讓客戶對我們“信任而敢于托付”。
審核編輯 黃宇
-
電機
+關注
關注
142文章
9081瀏覽量
146168 -
AGV
+關注
關注
27文章
1331瀏覽量
41198
發布評論請先 登錄
相關推薦


你想要的AGV小車減震結構,鳳凰動力都為你梳理清楚了
鳳凰動力舵輪驅動輪的穩定性如何影響AGV的運行效率和穩定性

鳳凰動力AGV舵輪大揭秘!
驅動輪舵輪專家-鳳凰動力詳細介紹AGV部署攻略,發掘“無人工廠”的無限可能
鳳凰動力為你詳解AGV舵輪的工作原理








 工商網監
工商網監
評論