 ROS移動機器人中常用的兩種電機
ROS移動機器人中常用的兩種電機
電機在整個ROS機器人系統中擔任“執行機構”的角色,機器人的動力來源于電機。 在電機參數范圍內,可以根據控制需求要求電機提供所需角速度和所需要的扭矩,電機都能夠在較短的時間內完成響應。 ROS移動機器人中常常會使用的如下兩種電機:
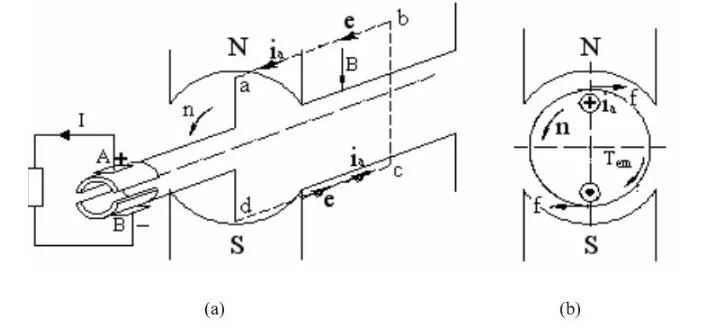
直流有刷電機:有刷電機中線圈的電流方向變換通過碳刷與換向器完成。 如下圖所示,電機由機座、磁極、換向器、端蓋、軸承和碳刷等構成。
直流有刷電機控制電路簡單,在只需要控制電機旋轉方向的場景下,通過兩個繼電器便可以實現電機控制。 在ROS移動機器人的應用場景下對電機的控制不僅僅有旋轉方向的控制需求,而且還有電機轉速的控制需求,所以在這種應用場景中 常常使用功率開關管(MOS,IGBT)搭建H橋電路進行電機方向與轉速的控制。 電路設計將在下篇文章進行介紹。
直流無刷電機:顧名思義直流無刷電機,在電機結構中取消了直流有刷電機中的碳刷。 此時電機繞組作為電機的定子,永磁體作為電機的轉子,與直流有刷電機結構恰恰相反。 直流有刷電機結構如下圖所示。
直流無刷電機具有轉速高,運行平穩,無打火,無灰塵等優點。 常常應用在對控制要求比較高,轉速較高的設備上,比如無人機,醫療設備,掃地機器中都可以看見無刷直流電機的身影。
與直流有刷電機相比無刷電機的優點眾多,但為了能夠發揮出無刷電機的眾多優勢。 需要復雜的控制電路(如:逆變電路,半橋驅動電路,檢流電路,編碼器接口,通信接口電路,電源電路等等),同時還需要配合電機控制算法(如方波控制算法,V/F控制算法,FOC控制算法等等)才能發揮出無刷電機的優勢。
下面我們來看看電機中幾個比較重要的定則,順便也復習下高中物理知識。
左手定則:位于磁場中的載流導體,會受到力的作用,力的方向可按照左手進行確定。 如下圖所示:
在電機中一個線圈有兩個有效線圈AB,CD。 它們在磁場中受力大小相等,方向相反,所以對中心軸的轉矩可通過下面的式子進行計算:

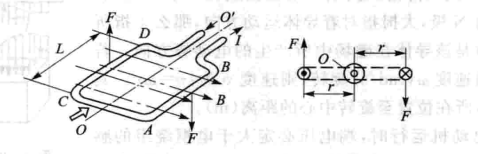
一般電機都會繞有n個線圈,所以線圈對中心軸的總轉矩可以這樣計算

當一個電機生產完成后,電機繞組圈數n,磁感應強度B以及線圈半徑r和有效長度L都是固定參數在這里可以當做一個常數K。

所以電機轉矩可以簡化為下式:

所以電機轉矩可以通過控制電流進行精確控制。
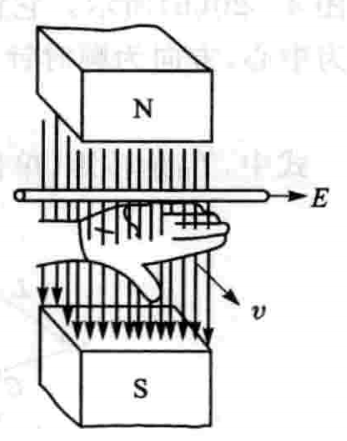
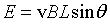
右手定則 : 導體在磁場中做切割磁力線運動時會在導體中產生感應電動勢E,其方向可以通過右手定則進行確定,如下圖所示。
計算公式為:
在電機中一般以角速度表示電機的轉速,并且電機有n個線圈。 所以電機在旋轉時的反電動勢可根據下式進行計算:

當電機確定后,繞組圈數n,線圈半徑r,磁感應強度B,導體有效長度L都為定值,可用常數Z進行表示。 這時電機反電動勢可由下式進行計算:

由上式可知當電機參數確定后,反電動勢由電機旋轉速度確定。
右手螺旋定則 : 用右手握住通電螺線管,讓四指指向導線中電流方向,那么大拇指指向就是通電螺線管中磁場方向。 這個定則在電機中主要用來確定電機線圈磁場方向。
-
線圈
+關注
關注
14文章
1832瀏覽量
44519 -
電機
+關注
關注
142文章
9042瀏覽量
145760 -
移動機器人
+關注
關注
2文章
763瀏覽量
33585 -
ROS
+關注
關注
1文章
278瀏覽量
17032 -
有刷電機
+關注
關注
3文章
171瀏覽量
13670
發布評論請先 登錄
相關推薦
資料:移動機器人能否自動充電?
Labview My RIO 移動機器人
家庭移動機器人避障常用傳感器及相關技術
如何實現移動機器人的設計?
請問怎么設計一種室外移動機器人組合導航定位系統?
什么是移動機器人軟硬件系統問題
最實用的STM32和ROS機器人的串口通信方案
如何利用掃地機輪子制作ROS移動機器人地盤
制作ROS移動機器人地盤

ROS移動機器人的通信接口電路設計





 工商網監
工商網監
評論