 雙TDA4VM NOA行泊一體化解決方案
雙TDA4VM NOA行泊一體化解決方案
當前,我們日常生活中,代駕這個詞使用越來越頻繁,除了真人司機代駕,汽車本身也越來越智能,越來越成為司機的得力副駕駛。開發一個能夠幫助汽車感知、理解周圍世界并對其作出快速反應的動態系統,汽車自身可以成為司機的得力代駕。這樣一個系統需要數據以及結合計算機視覺和高效深度學習神經網絡實時處理數據的能力。今天我們介紹的雙TDA4VM Navigate on Autopilot (NOA)行泊一體化方案,就是這樣的一個系統。
NOA領航輔助駕駛實現了在高頻場景的代駕, 比如城市環線、快速路、高速公路上的點對點的自動駕駛。NOA在全面升級輔助駕駛ADAS功能體驗的同時,增加了自動并線、自動超車、自動上下匝道、自動路網切換等,推動了人機共駕的到來的同時,給用戶帶來了非凡的駕乘體驗。
當前的汽車智能化的進程中,更多的汽車配備了強大的 ADAS 功能,在以場景為核心的自動駕駛技術向無人駕駛階段過渡的過程中,NOA領航輔助駕駛是從高級駕駛輔助(ADAS)到全自動駕駛(FSD)之間的一個重要里程,NOA開啟了一個人機共駕的時代,創造了在典型場景下沉浸式的駕駛體驗。如何設計一個成本低廉、功能完整、靈活的硬件配置方案,是NOA大規模應用所面臨的挑戰。基于TI的雙TDA4VM的NOA行泊一體化的方案平衡了算力、成本和能耗。下面跟大家具體介紹雙TDA4VM NOA 行泊一體化解決方案該方案:
ADAS 解決方案需要從不同的傳感器集中提取數據,并將數據轉換為車輛的行駛情報。這些傳感器至少需要配備不同類型的攝像頭、雷達和超聲波等;本文展示的方案采用了兩顆 TDA4VM,接入了11個攝像頭、5個毫米波雷達12個超聲波雷達,既11V5R12USS行泊一體化解決方案。其系統框圖如下圖所示, TDA4VM_A 接入了四個全景攝像頭和兩個前向攝像頭。TDA4VM_B接入了四個側視攝像頭和一個前向攝像頭。

行車方面,可實現盲區檢測(BSD)、開門預警(DOW)、車道偏離預警(LCW)、前向碰撞預警(FCW)、只能遠光燈控制(IHC)、前方穿行預警(FCTA)、后方穿行預警(RCTA)、后方碰撞預警(RCW)、自適應巡航(ACC)、車道保持輔助(LKA)、手動變道(PLC)、交通擁堵輔助(TJA)、高速輔助駕駛(HWA)、自動緊急制動(AEB)、交互時高速公路自動駕駛(HWP)、交互式高速公路擁堵自動駕駛(TJP)、自動輔助導航駕駛(NOA)等功能;
泊車方面,可實現全景功能(AVM)、自動泊車輔助(APA)、遙控泊車輔助(RPA)、家庭區域記憶泊車(HAVP)等功能;
安全方面,TI Jacinto7 處理器有GP和HS(high security)芯片,內部集成了ASIL D的MCU,High security 的芯片可支持安全啟動和安全關鍵功能,從而使用戶的產品能夠滿足汽車的質量和可靠性目標。
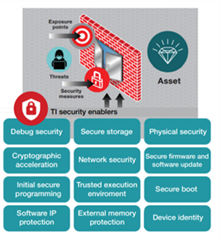
TI安全框架
可擴展性,TDA4VM處理器屬于異構多核的架構,除了ARM A72、數字信號處理C7x/C66、MCU R5F等計算核,內部VPAC、DMPAC等加速器有效降低了主核的負載,從而使得應用可以靈活部署,推動持續的功能定制、優化、擴展。
算力方面,本方案采用了雙TDA4VM芯片,單芯片C7x/MMA可以實現8TOPS算力,總算力16TOPS算力,即可實現所介紹感知功能。TDA4VM_A芯片的AI算力主要用于全景攝像頭、前向攝像頭1、前向攝像頭2的感知。TDA4VM_B芯片的算力AI主要應用于側視攝像頭和前向攝像頭3的感知。
系統的開發必須具有較高性價比,才能實現廣泛而有效的利用。采用雙TDA4VM的NOA行泊一體的方案,平衡了算力、成本、和功耗,豐富的行車、泊車功能及高安全的系統,給用戶帶來了厘米級的控制精度,安全舒適的沉浸式的駕乘體驗。

TI 最新一代Jacinto7 ADAS TDA4VM 處理器在芯片上集成了關鍵的功能安全特性,高性能片上系統 (SoC)的重要性在于它可以進行并行處理。 Jacinto7 TDA4處理器可以從簡單的情況(更少的傳感器,更低的分辨率)擴展到最復雜的情況,并有助于降低系統成本,從而實現 ADAS 技術大眾化和普及化。雙TDA4VM NOA行泊一體化方案是實現計算能力、成本和能耗平衡的完美答案。TDA4x以領先的集成度和豐富的ADAS功能引領汽車智能駕駛的新時代。
審核編輯:郭婷
-
傳感器
+關注
關注
2552文章
51383瀏覽量
755964 -
處理器
+關注
關注
68文章
19404瀏覽量
230886 -
soc
+關注
關注
38文章
4199瀏覽量
218862 -
計算機
+關注
關注
19文章
7534瀏覽量
88494
發布評論請先 登錄
相關推薦
基于XML Web Services的管控一體化解決方案的研
知行科技行泊一體化解決方案獲得多個車型量產定點
單TDA4VH/TDA4VM PLUS行泊一體化方案
目前市場上推出的多SoC芯片行泊一體方案案例

雙TDA4VM NOA行泊一體化解決方案
基于單顆地平線征程3,宏景智駕首發單SoC行泊一體解決方案
智能配電一體化解決方案
供應 ETA9184:TWS的一體化解決方案





 工商網監
工商網監
評論